
——
#DonLucElectronics #DonLuc #UNIHIKER #Display #IoT #Project #Debian #Thonny #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
UNIHIKER Accelerometer and Gyroscope
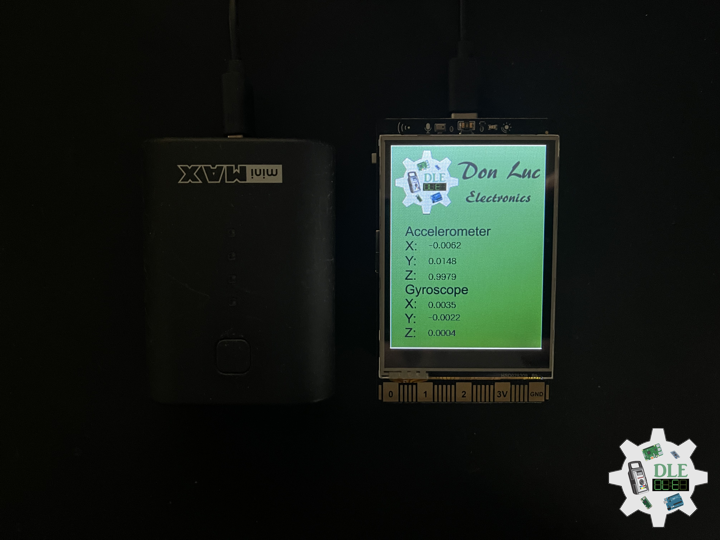
The UNIHIKER’s back panel is equipped with a 6-axis accelerometer-gyroscope sensor, capable of reading the X, Y, and Z values of acceleration individually, as well as the total strength in X, Y, and Z directions, and the X, Y, and Z values of the gyroscope.
DL2408Mk03
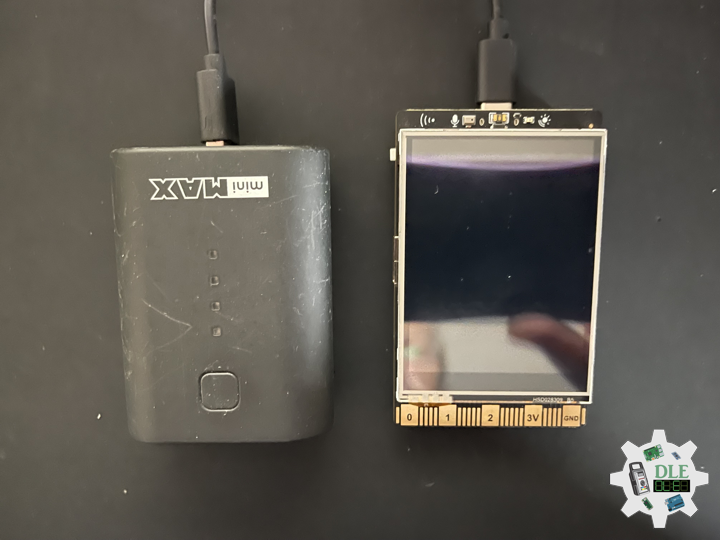
1 x UNIHIKER
1 x USB Battery Pack
1 x USB 3.1 Cable A to C
DL2408Mk03p
DL2408Mk03p.py
"""
****** Don Luc Electronics © ******
Software Version Information
Project #30 - UNIHIKER - Accelerometer and Gyroscope - Mk01
30-01
DL2408Mk03p.py
DL2408Mk03
1 x UNIHIKER
1 x USB Battery Pack
1 x USB 3.1 Cable A to C
-*- coding: utf-8 -*-
"""
# Import the unihiker library
from unihiker import GUI
# Import the time library
import time
# Import the Board module from the pinpong.board package
from pinpong.board import Board
# Import all modules from the pinpong.extension.unihiker package
from pinpong.extension.unihiker import *
# Initialize the board by selecting the board type and port number;
# if not specified, the program will automatically detect it
Board().begin()
# Instantiate the GUI class and create a gui object
gui = GUI()
# Display the initial background image 'dlemk02'
img = gui.draw_image(x=0, y=0, w=240, h=320, image='dlemk02.png')
# Accelerometer
# Display the initial Accelerometer X valueAX
valueAX = gui.draw_text(x=60, y=145, text='0', font_size=10)
# Display the initial Accelerometer Y valueAY
valueAY = gui.draw_text(x=60, y=170, text='0', font_size=10)
# Display the initial Accelerometer Z valueAZ
valueAZ = gui.draw_text(x=60, y=195, text='0', font_size=10)
# Gyroscope
# Display the initial Gyroscope X valueGX
valueGX = gui.draw_text(x=60, y=240, text='0', font_size=10)
# Display the initial Gyroscope Y valueGY
valueGY = gui.draw_text(x=60, y=260, text='0', font_size=10)
# Display the initial Gyroscope Z valueGZ
valueGZ = gui.draw_text(x=60, y=285, text='0', font_size=10)
while True:
# Accelerometer
# Display the Accelerometer X
AX = accelerometer.get_x()
# Update the displayed Accelerometer X valueAX
valueAX.config(text=AX)
# Display the Accelerometer Y
AY = accelerometer.get_y()
# Update the displayed Accelerometer Y valueAY
valueAY.config(text=AY)
# Display the Accelerometer Z
AZ = accelerometer.get_z()
# Update the displayed Accelerometer Z valueAZ
valueAZ.config(text=AZ)
# Gyroscope
# Display the Gyroscope X
GX = gyroscope.get_x()
# Update the displayed Gyroscope X valueAX
valueGX.config(text=GX)
# Display the Gyroscope Y
GY = gyroscope.get_y()
# Update the displayed Gyroscope Y valueAY
valueGY.config(text=GY)
# Display the Gyroscope Z
GZ = gyroscope.get_z()
# Update the displayed Gyroscope Z valueAZ
valueGZ.config(text=GZ)
# Delay for 1 second to keep the screen content displayed for a longer time
time.sleep(1)
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot Luc.Paquin: https://edu.dfrobot.com/dashboard/makelogs
Hackster.io: https://www.hackster.io/neosteam-labs
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc