Project #25 – Movement – IMU – Mk05
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #Movement #Magnetometer #Accelerometer #Gyroscope #9DOF #Barometer #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Inertial Measurement Unit
An inertial measurement unit (IMU) is an electronic device that measures and reports a body’s specific force, angular rate, and sometimes the orientation of the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers. When the magnetometer is included, IMUs are referred to as IMMUs. IMUs are typically used to maneuver modern vehicles including motorcycles, missiles, aircraft, including unmanned aerial vehicles, among many others, and spacecraft, including satellites and landers. Recent developments allow for the production of IMU-enabled GPS devices. An IMU allows a GPS receiver to work when GPS-signals are unavailable, such as in tunnels, inside buildings, or when electronic interference is present.
AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter (LSM6DS33, LIS3MDL, and LPS25H Carrier)
The Pololu AltIMU-10 v5 is an inertial measurement unit (IMU) and altimeter that features the same LSM6DS33 gyro and accelerometer and LIS3MDL magnetometer as the MinIMU-9 v5, and adds an LPS25H digital barometer. An I²C interface accesses ten independent pressure, rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s altitude and absolute orientation. The board operates from 2.5 to 5.5 V and has a 0.1″ pin spacing.
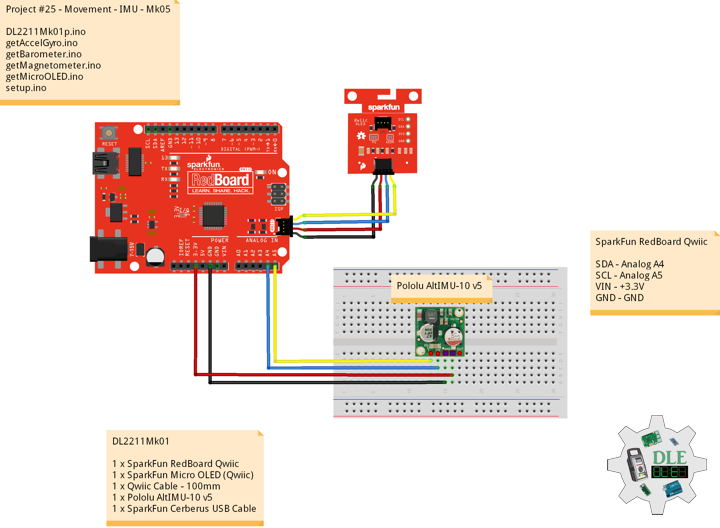
DL2211Mk01
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable – 100mm
1 x Pololu AltIMU-10 v5
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #25 - Movement - IMU - Mk05
25-05
DL2211Mk01p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable - 100mm
1 x Pololu AltIMU-10 v5
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital barometer
#include <LPS.h>
// 9DoF IMU
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "25-05";
void loop() {
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Micro OLED
isMicroOLED();
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display Accelerometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Accelerometer
oled.print("Acceler");
oled.setCursor(0, 12);
// X
oled.print("X: ");
oled.print(imuAX);
oled.setCursor(0, 25);
// Y
oled.print("Y: ");
oled.print(imuAY);
oled.setCursor(0, 39);
// Z
oled.print("Z: ");
oled.print(imuAZ);
oled.display();
// Delay
delay(3000);
// Text Display Gyroscopes
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Gyroscopes
oled.print("Gyro");
oled.setCursor(0, 12);
// X
oled.print("X: ");
oled.print(imuGX);
oled.setCursor(0, 25);
// Y
oled.print("Y: ");
oled.print(imuGY);
oled.setCursor(0, 39);
// Z
oled.print("Z: ");
oled.print(imuGZ);
oled.display();
// Delay
delay(3000);
// Text Display Magnetometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Magnetometer
oled.print("Mag");
oled.setCursor(0, 12);
// X
oled.print("X: ");
oled.print(magX);
oled.setCursor(0, 25);
// Y
oled.print("Y: ");
oled.print(magY);
oled.setCursor(0, 39);
// Z
oled.print("Z: ");
oled.print(magZ);
oled.display();
// Delay
delay(3000);
// Text Display Barometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Barometer
oled.print("Baro");
oled.setCursor(0, 12);
// Pressure
oled.print("P: ");
oled.print(pressure);
oled.setCursor(0, 25);
// Altitude Meters
oled.print("A: ");
oled.print(altitude);
oled.setCursor(0, 39);
// Temperature Celsius
oled.print("T: ");
oled.print(temperature);
oled.display();
// Delay
delay(3000);
}
setup.ino
// Setup
void setup() {
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// Setup Barometer
isSetupBarometer();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2022
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Leave a Reply