
——
——
——
——
——
——
——
——
——
Servo (Radio Control)
Servos (also RC servos) are small, cheap, mass-produced servomotors or other actuators used for radio control and small-scale robotics.
Radio control servos are connected through a standard three-wire connection: two wires for a DC power supply and one for control, carrying a pulse-width modulation (PWM) signal. Each servo has a separate connection and PWM signal from the radio control receiver. This signal is easily generated by simple electronics, or by microcontrollers such as the Arduino. This, together with their low-cost, has led to their wide adoption for robotics and physical computing.
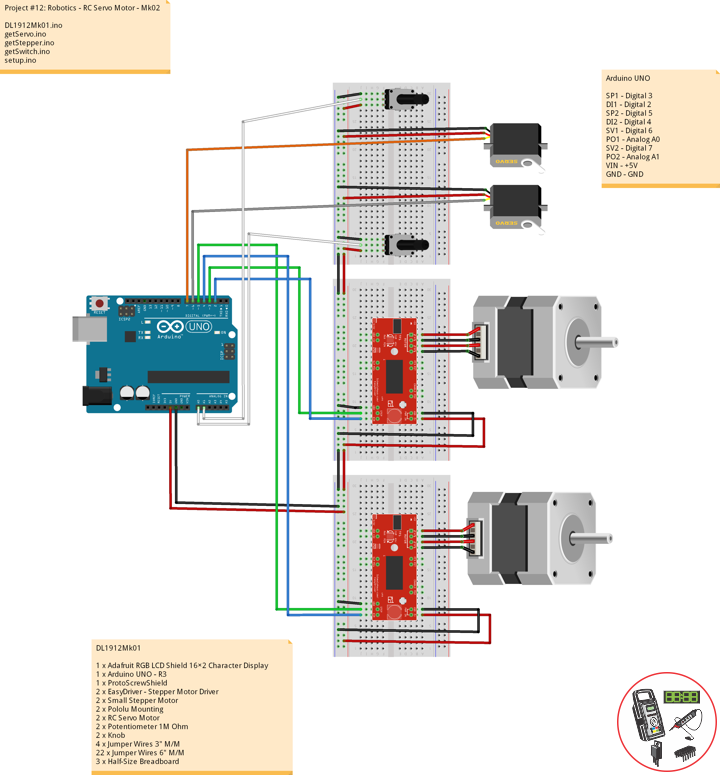
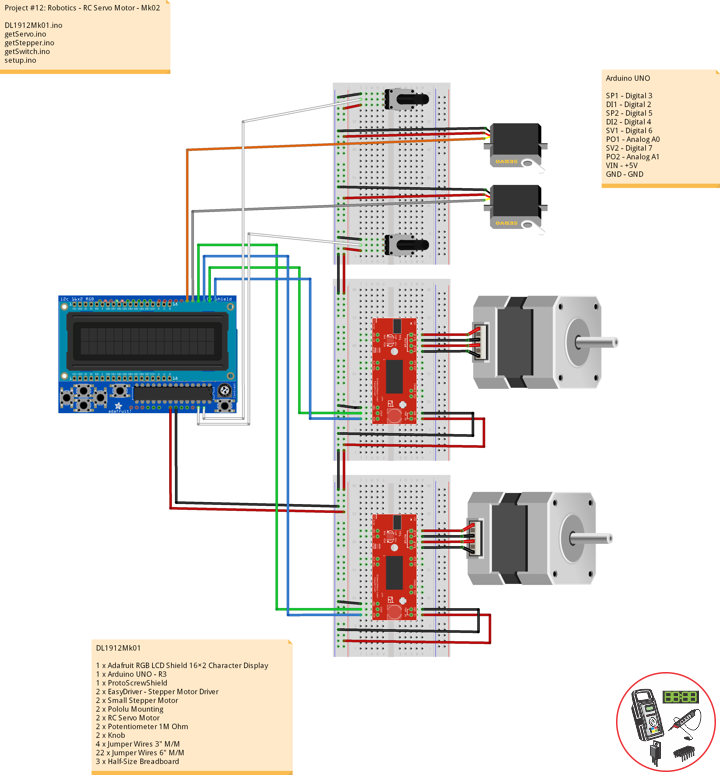
DL1912Mk01
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
2 x EasyDriver – Stepper Motor Driver
2 x Small Stepper Motor
2 x Pololu Mounting
2 x RC Servo Motor
2 x Potentiometer 1M Ohm
2 x Knob
4 x Jumper Wires 3″ M/M
22 x Jumper Wires 6″ M/M
3 x Half-Size Breadboard
Arduino UNO
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
SV1 – Digital 6
PO1 – Analog A0
SV2 – Digital 7
PO2 – Analog A1
VIN – +5V
GND – GND
DL1912Mk01.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - RC Servo Motor - Mk02
// 12-01
// DL1912Mk01p.ino 12-02
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// 2 x Small Stepper Motor
// 2 x EasyDriver
// 2 x RC Servo Motor
// 2 x Potentiometer
// include the library code:
#include <Adafruit_RGBLCDShield.h>
#include <Servo.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// 2 x EasyDriver
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
// 2 x RC Servo Motor
// 2 x Potentiometer
Servo isRCServo1; // Create servo object to control a RCServo1
int servo1 = 6; // Servo 1
int iPot1 = A0; // Analog Potentiometer 1
int iVal1; // Variable - Analog Potentiometer 1
Servo isRCServo2; // Create servo object to control a RCServo2
int servo2 = 7; // Servo 2
int iPot2 = A1; // Analog Potentiometer 2
int iVal2; // Variable - Analog Potentiometer 2
void loop() {
// Clear
RGBLCDShield.clear();
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
}
getServo.ino
// Servo
// isServoSetup
void isServoSetup() {
// 2 x RC Servo Motor
isRCServo1.attach( servo1 );
isRCServo2.attach( servo2 );
}
// isServo1
void isServo1() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal1 = analogRead( iPot1 ); // Reads the value of the iPot1 (Value between 0 and 1023)
iVal1 = map(iVal1, 0, 1023, 0, 180); // Scale it to use it with the isRCServo1 (Value between 0 and 180)
isRCServo1.write( iVal1 ); // isRCServo1 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
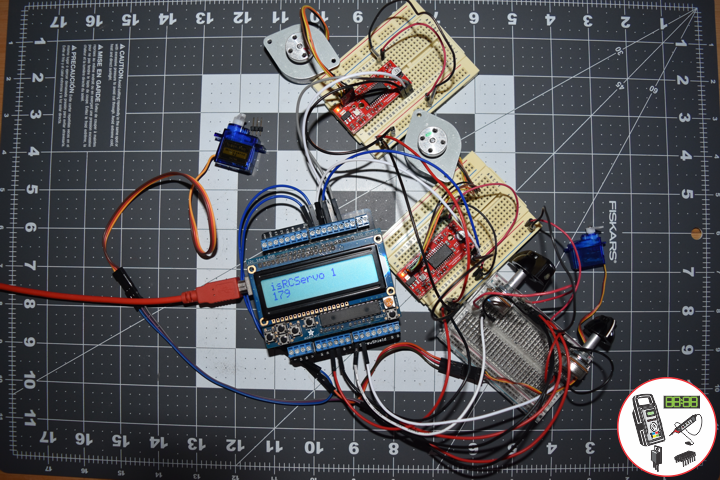
RGBLCDShield.print("isRCServo 1"); // isRCServo 1
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal1 ); // Reads the value iVal1
delay(500);
}
// isServo2
void isServo2() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal2 = analogRead( iPot2 ); // Reads the value of the iPot2 (Value between 0 and 1023)
iVal2 = map(iVal2, 0, 1023, 0, 180); // Scale it to use it with the isRCServo2 (Value between 0 and 180)
isRCServo2.write( iVal2 ); // isRCServo2 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
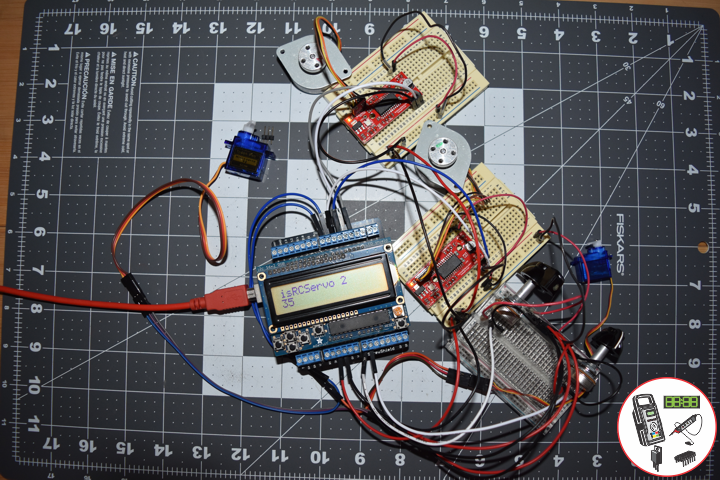
RGBLCDShield.print("isRCServo 2"); // isRCServo 2
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal2 ); // Reads the value iVal2
delay(500);
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper1
void isStepper1(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
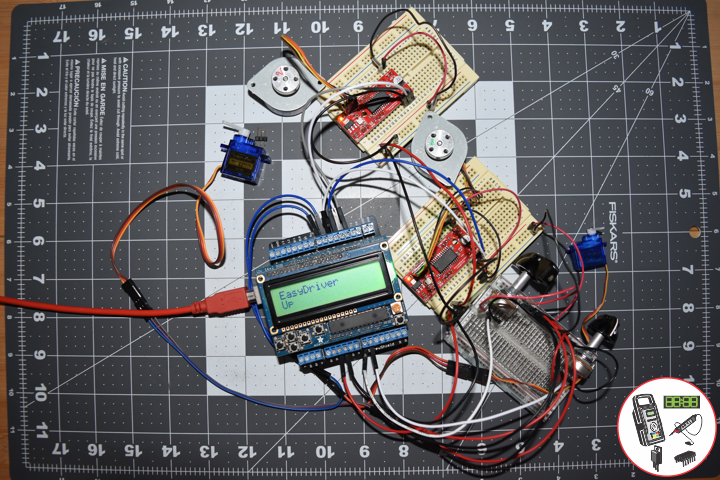
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Up");
delay(500);
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepper2
void isStepper2(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
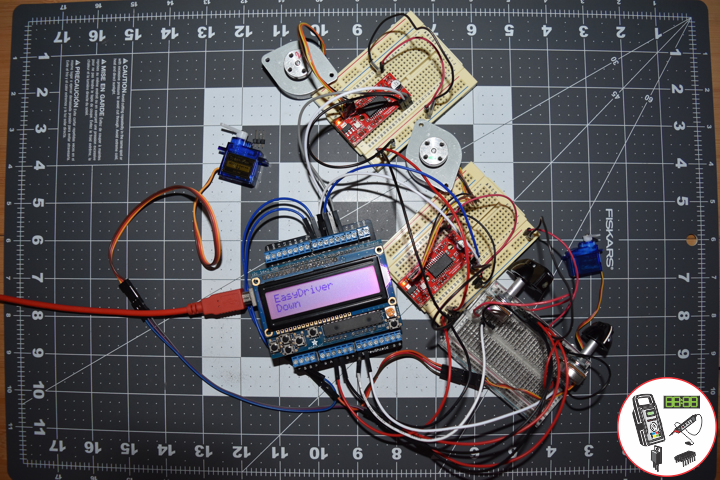
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Down");
delay(500);
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(100);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepperStop
void isStepperStop() {
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
// Up
yy = 1;
// 2 x EasyDriver
isStepper1();
}
// Switch 2
void isSwitch2(){
// Down
yy = 2;
// 2 x EasyDriver
isStepper2();
}
// Switch 3
void isSwitch3(){
// Right
yy = 3;
// Potentiometer RC Servo Motor 1
isServo1();
}
// Switch 4
void isSwitch4(){
// Left
yy = 4;
// Potentiometer RC Servo Motor 2
isServo2();
}
// Switch 5
void isSwitch5(){
// Stop
yy = 5;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
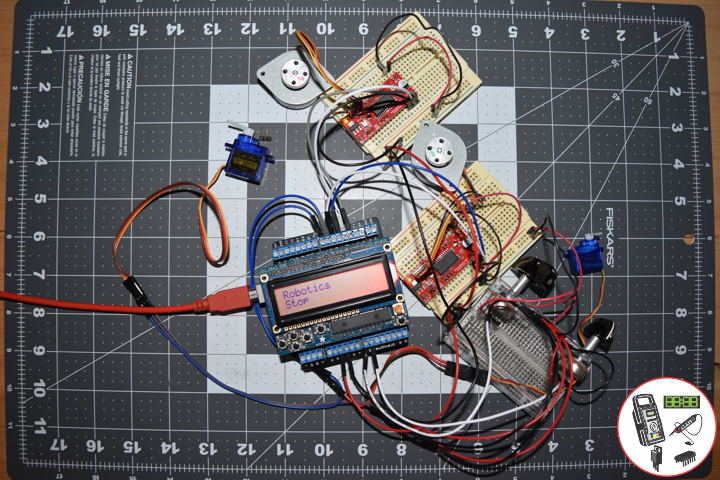
RGBLCDShield.print("Robotics"); // Robotics
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
delay( 500 );
// EasyDriver
isStepperStop();
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // EasyDriver
delay(5000);
// Clear
RGBLCDShield.clear();
// 2 x EasyDriver
isStepperSetup();
// 2 x RC Servo Motor
isServoSetup();
}
Follow Us
Web: https://www.donluc.com/
Web: http://neosteamlabs.com/
Web: http://www.jlpconsultants.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc