Project #12: Robotics – EasyDriver – Mk01
——
——
——
——
——
——
Small Stepper Motor
Stepper motors are great motors for position control. They can be found in desktop printers, plotters, 3D printers, CNC milling machines, and anything else requiring precise position control. Steppers are a special segment of brushless motors. They are purposely built for high-holding torque. This high-holding torque gives the user the ability to incrementally “step” to the next position. This results in a simple positioning system that doesn’t require an encoder. This makes stepper motor controllers very simple to build and use. These small steppers are a great way to get things moving, especially when positioning and repeatability is a concern. This is a Bipolar motor.
Pros
Excellent position accuracy
High holding torque
High reliability
Most steppers come in standard sizes
Cons
Small step distance limits top speed
It’s possible to “skip” steps with high loads
Draws maximum current constantly
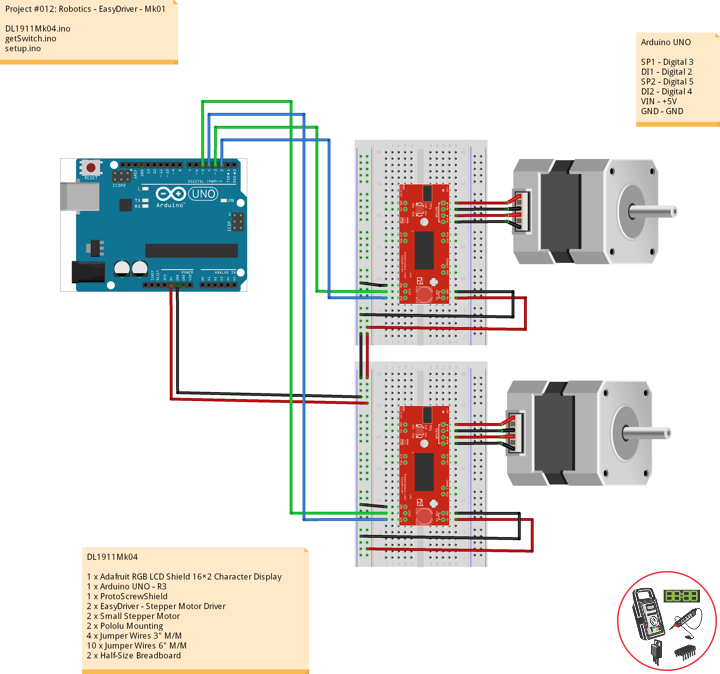
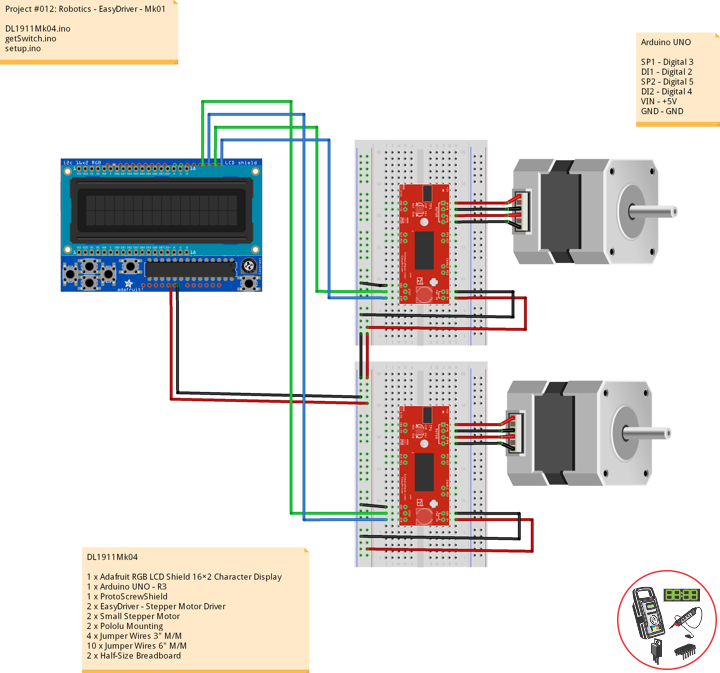
DL1911Mk04
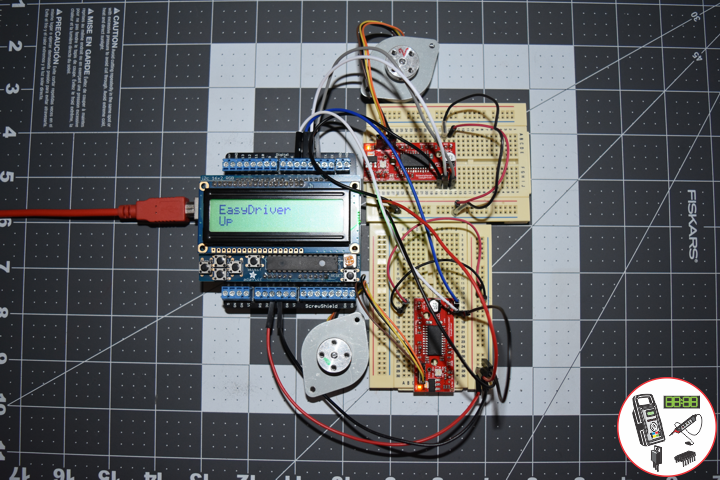
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
2 x EasyDriver – Stepper Motor Driver
2 x Small Stepper Motor
2 x Pololu Mounting
4 x Jumper Wires 3″ M/M
10 x Jumper Wires 6″ M/M
2 x Half-Size Breadboard
Arduino UNO
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
VIN – +5V
GND – GND
DL1911Mk04.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - EasyDriver - Mk01
// 11-04
// DL1911Mk04p.ino 12-01
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// 2 x Small Stepper Motor
// 2 x EasyDriver
// include the library code:
#include <Adafruit_RGBLCDShield.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// 2 x EasyDriver
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
void loop() {
// Clear
RGBLCDShield.clear();
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
// Up
yy = 1;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Up");
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 2
void isSwitch2(){
// Down
yy = 2;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Down");
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(100);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 3
void isSwitch3(){
// Right
yy = 3;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Hight");
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 4
void isSwitch4(){
// Left
yy = 4;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Left");
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 5
void isSwitch5(){
// Stop
yy = 5;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
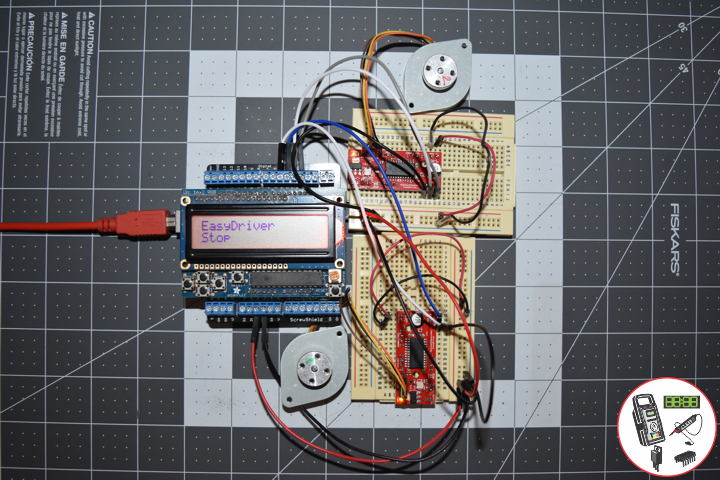
RGBLCDShield.print("Stop");
delay( 1000 );
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("EasyDriver"); // EasyDriver
delay(5000);
// Clear
RGBLCDShield.clear();
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
Follow Us
Web: https://www.donluc.com/
Web: http://neosteamlabs.com/
Web: http://www.jlpconsultants.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
Leave a Reply