Pololu Wheel
Project #12: Robotics – Pololu Wheel – Mk23
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Pololu Wheel 90 mm × 10 mm – Black
These black plastic wheels have silicone tires and measure 90 mm (3.54 inches) in diameter, and they press-fit onto the 3mm D shafts on many of our motors, including our micro metal gearmotors and our mini plastic gearmotors. Additionally, this wheel is compatible with several of our universal mounting hubs, which can serve as adapters for motors with different shafts. Six mounting holes for #4 or M3 screws make it possible to use the wheel with any of our universal mounting hubs for those screw sizes, enabling these wheels to be used with our larger metal gearmotors and stepper motors. The included silicone tires, which feature horizontal treads for improved traction.
DL2202Mk03
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm – Black
4 x Screw – #4-40 – 3/8 inch
1 x SparkFun Cerberus USB Cable
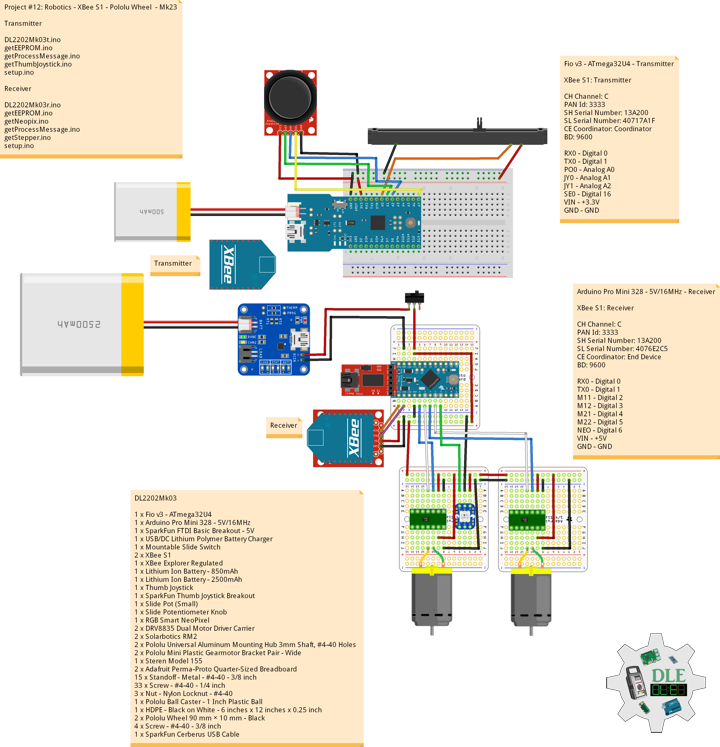
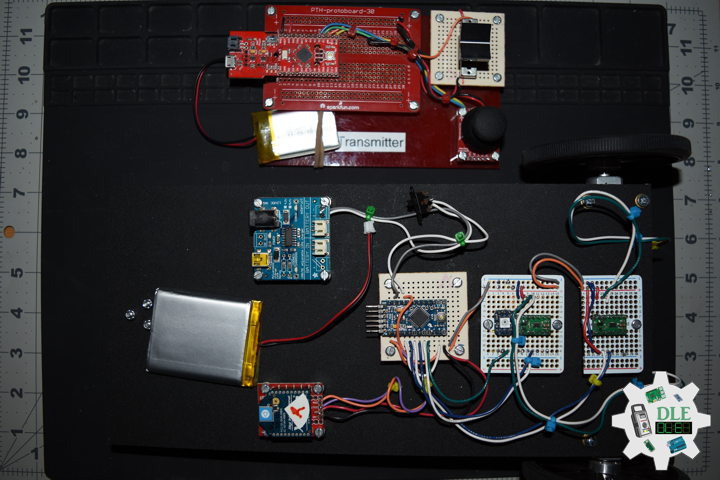
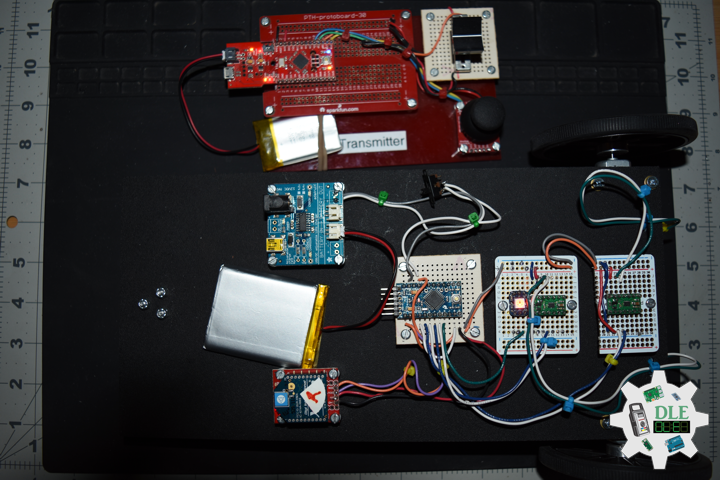
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk03t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Transmitter
DL2202Mk03t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-23t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk03r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Receiver
DL2202Mk03r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm - Black
4 x Screw - #4-40 - 3/8 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-23r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 80, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Backward
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Forward
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc