Micro OLED
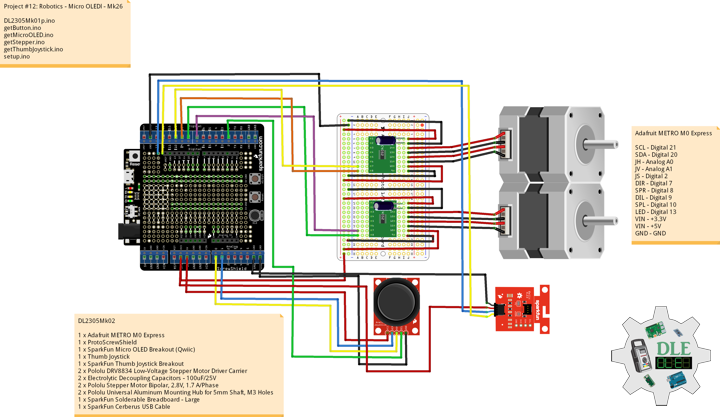
Project #12: Robotics – Micro OLED – Mk26
——
#DonLucElectronics #DonLuc #Robotics #MicroOLED #AdafruitMETROM0Express #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——-
Micro OLED
Micro OLED displays are silicon-based OLED display that use a monocrystalline silicon wafer as the actively driven backplane, so it is easier to achieve high PPI (Pixel Density), a high degree of integration, and small size. This ensures they are easy to carry, have good anti-seismic performance, and have ultra-low power consumption.
DL2305Mk02
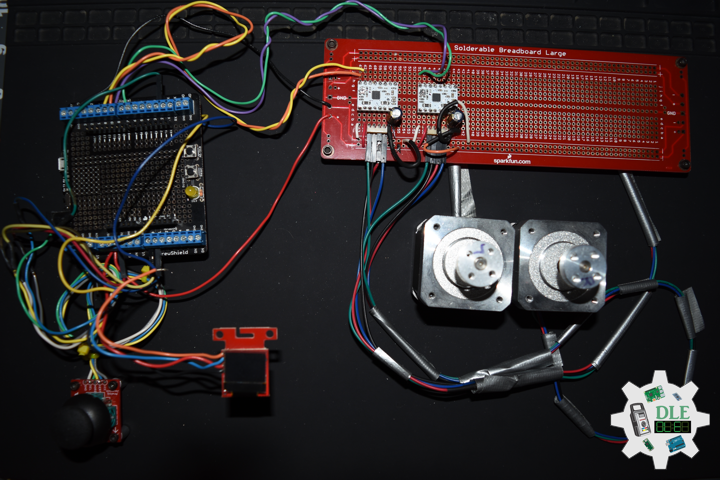
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors – 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard – Large
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
SCL – Digital 21
SDA – Digital 20
JH – Analog A0
JV – Analog A1
JS – Digital 2
DIR – Digital 7
SPR – Digital 8
DIL – Digital 9
SPL – Digital 10
LED – Digital 13
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2305Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Micro OLED - Mk26
12-26
DL2305Mk02p.ino
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors - 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard - Large
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// DRV8834 Stepper Motor Driver
#include <BasicStepperDriver.h>
#include <MultiDriver.h>
// Wire communicate with I2C / TWI devices
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// DRV8834 Stepper Motor Driver
// Stepper motor steps per revolution.
// Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// Target RPM for X axis stepper motor
#define MOTOR_X_RPM 800
// Target RPM for Y axis stepper motor
#define MOTOR_Y_RPM 800
// Since microstepping is set externally,
// make sure this matches the selected mode
// If it doesn't, the motor will move at a
// different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// X Stepper motor
#define DIR_X 7
#define STEP_X 8
// Y Stepper motor
#define DIR_Y 9
#define STEP_Y 10
// BasicStepperDriver
BasicStepperDriver stepperX(MOTOR_STEPS, DIR_X, STEP_X);
BasicStepperDriver stepperY(MOTOR_STEPS, DIR_Y, STEP_Y);
// Pick one of the two controllers below
// each motor moves independently
MultiDriver controller(stepperX, stepperY);
// Joystick
#define JH A0
#define JV A1
#define JS 2
// Variable for reading the button
int JSState = 0;
// Adjusted Value
int adjustedValue = 0;
int adjustedValue2 = 0;
// LED Yellow
int iLED = 13;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "12-26";
void loop() {
// Button
isButton();
// Joystick
isThumbJoystick();
// Stepper
isStepper();
// Micro OLED
isMicroOLED();
}
getButton.ino
// Button
// Button Setup
void isButtonSetup() {
// Make the button line an input
pinMode(JS, INPUT_PULLUP);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
}
// Button
void isButton(){
// Read the state of the button
JSState = digitalRead(JS);
// Check if the button is pressed.
// If it is, the JSState is HIGH:
if (JSState == HIGH) {
// Button
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
} else {
// Button
// Turn the LED on LOW
digitalWrite(iLED, LOW);
}
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isMicroOLEDSetup() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (Splash Screen SparkFun)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
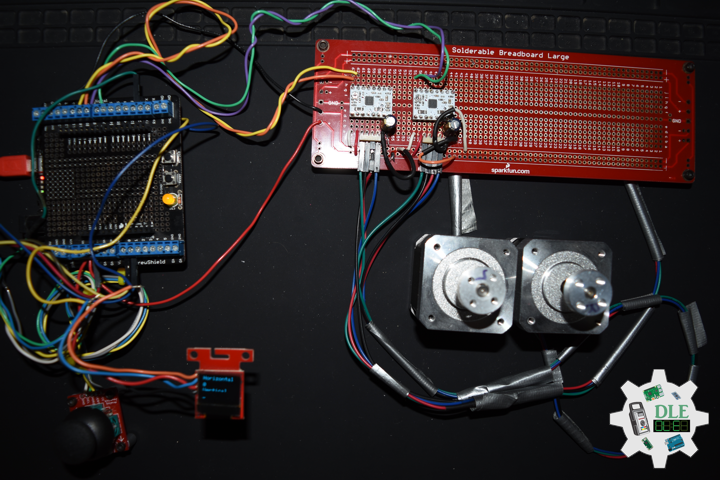
// Horizontal
oled.print("Horizontal");
// Horizontal
oled.setCursor(0, 13);
oled.print( adjustedValue );
// Vertical
oled.setCursor(0, 24);
oled.print("Vertical");
// Vertical
oled.setCursor(0, 37);
oled.print( adjustedValue2 );
oled.display();
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// Set stepper target motors RPM.
stepperX.begin(MOTOR_X_RPM, MICROSTEPS);
stepperY.begin(MOTOR_Y_RPM, MICROSTEPS);
}
// Stepper
void isStepper() {
// Stepper => Controller rotate
controller.rotate(adjustedValue, adjustedValue2);
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick JH
// Horizontal
// Joystick Pot Values JH
int potValue = analogRead(JH);
int potValues = 0;
// Adjusted Value
potValues = map(potValue, 0, 1023, 1000, -1000);
if (potValues > 300) {
adjustedValue = potValues;
} else if (potValues < -300) {
adjustedValue = potValues;
} else {
adjustedValue = 0;
}
// Joystick JV
// Vertical
// Joystick Pot Values JV
int potValue2 = analogRead(JV);
int potValues2 = 0;
// Adjusted Value2
potValues2 = map(potValue2, 0, 1023, 1000, -1000);
if (potValues2 > 300) {
adjustedValue2 = potValues2;
} else if (potValues2 < -300) {
adjustedValue2 = potValues2;
} else {
adjustedValue2 = 0;
}
}
setup.ino
// Setup
void setup()
{
// Wire communicate with I2C / TWI devices
Wire.begin();
// Setup Micro OLED
isMicroOLEDSetup();
// Button Setup
isButtonSetup();
// DRV8834 Stepper Motor Driver
isStepperSetup();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc