
——
#DonLucElectronics #DonLuc #Sound #Metronome #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——

——
Metronome
A metronome is a device that produces an audible click or other sound at a regular interval that can be set by the user, typically in Beats Per Minute (BPM). Metronomes may include synchronized visual motion. Musicians use the device to practise playing to a regular pulse. In the 20th century, electronic metronomes and software metronomes were invented.
Musicians practise with metronomes to improve their timing, especially the ability to stick to a regular tempo. Metronome practice helps internalize a clear sense of timing and tempo. Composers and conductors often use a metronome as a standard tempo reference, and may play, sing, or conduct to the metronome. The metronome is used by composers to derive beats per minute if they want to indicate that in a composition. Conductors use a metronome to note their preferred tempo in each section.
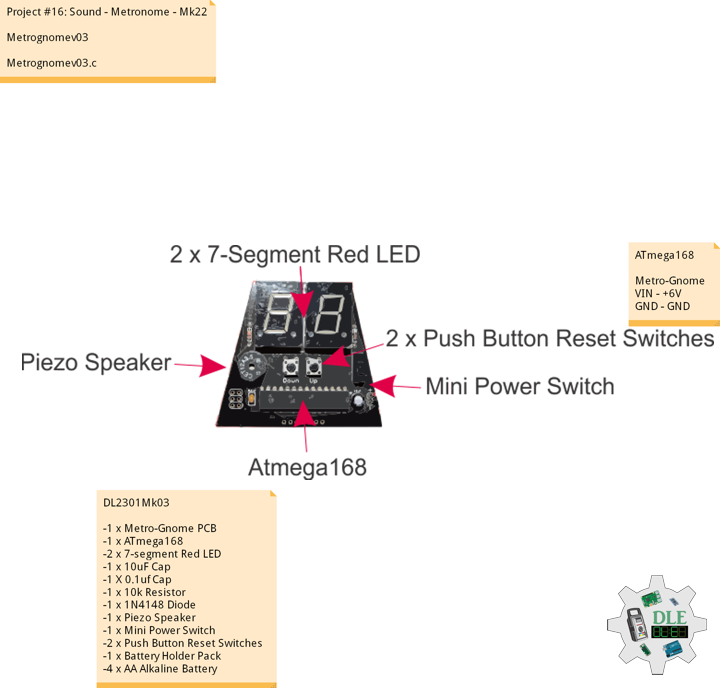
SparkFun Metro-Gnome
The SparkFun Metro-Gnome is a basic digital metronome used to keep time during music practice. This is a basic kit that goes together in 15-20 minutes for people learning to solder, and 5-10 minutes for those with a bit of experience.
DL2301Mk03
-1 x Metro-Gnome PCB
-1 x ATmega168
-2 x 7-Segment Red LED
-1 x 10uF Capacitor
-1 X 0.1uf Capacitor
-1 x 10k Resistor
-1 x 1N4148 Diode
-1 x Piezo Speaker
-1 x Mini Power Switch
-2 x Push Button Reset Switches
-1 x Battery Holder Pack
-4 x AA Alkaline Battery
ATmega168
Metro-Gnome
VIN – +6V
GND – GND
——
Metrognomev03
Metrognomev03.c
// Metronome-v03
#define F_CPU 1024000 // Adjust this to get the clock more precise
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#define BUZZER1 1
#define BUZZER1_PORT PORTB
#define BUZZER2 2
#define BUZZER2_PORT PORTB
#define sbi(port_name, pin_number) (port_name |= 1<<pin_number)
#define cbi(port_name, pin_number) ((port_name) &= (uint8_t)~(1 << pin_number))
uint16_t countUp = F_CPU/1024; // Dividing clock by 1024
uint16_t speed = 60; // Program initially runs at 60 BPM
uint8_t leftDisplay = 6; // Initialize output to show 60 BPM
uint8_t rightDisplay = 0;
void ioinit();
void display(int digit, int number);
// Interrupt Timer 1 makes the buzzer tick at proper intervals
ISR(TIMER1_COMPA_vect)
{
int buzzPeriod = 100;
uint32_t buzzLength = 1000;
while(1)
{
//Subtract the buzzPeriod from the overall length
if(buzzPeriod > buzzLength) break;
buzzLength -= buzzPeriod;
if(buzzPeriod > buzzLength) break;
buzzLength -= buzzPeriod;
//Toggle the buzzer at various speeds
PINB = 0b00000010;
_delay_us(buzzPeriod);
PINB = 0b00000100;
_delay_us(buzzPeriod);
}
}
// Interrupt Timer 2 checks for button presses
ISR(TIMER0_COMPA_vect)
{
// Check down button
if( (PINB & (1<<4)) == 0)
{
if (speed == 1) // If speed = 1 go up to 299
{
speed = 299;
rightDisplay = 9;
leftDisplay = 9;
}
else if ((rightDisplay == 0) && (leftDisplay == 0))
{
rightDisplay = 9;
leftDisplay = 9;
speed--;
}
else if (rightDisplay == 0)
{
rightDisplay = 9;
leftDisplay--;
speed--;
}
else
{
rightDisplay--;
speed--;
}
// Reset counter and adjust compare register
TCNT1 = 0x00;
OCR1A = (countUp*60)/speed;
}
// Check up button
if((PINB & (1<<5)) == 0)
{
if (speed == 299)
{
speed = 1;
rightDisplay = 1;
leftDisplay = 0;
}
else if ((rightDisplay == 9) && (leftDisplay == 9))
{
rightDisplay = 0;
leftDisplay = 0;
speed++;
}
else if (rightDisplay == 9)
{
rightDisplay = 0;
leftDisplay++;
speed++;
}
else
{
rightDisplay++;
speed++;
}
// Reset counter and adjust compare register
TCNT1 = 0x00;
OCR1A = (countUp*60)/speed;
}
}
int main()
{
int flag = 0;
ioinit();
while(1) // Main loop PWM's the two displays at 1kHz
{
if (flag == 0)
{
cbi(PORTC, 1); // Turn right display off
display(0, leftDisplay); // Output to left display
flag = 1;
}
else
{
cbi(PORTC, 0); // Turn left display off
display(1, rightDisplay); // Output to right display
flag = 0;
}
_delay_us(10);
PORTD = 0xFF;
cbi(PORTC, 0);
cbi(PORTC, 1);
_delay_us(30);
}
return 0;
}
void ioinit()
{
// set PORTB for Buzzer and buttons
DDRB = DDRB | 0b00110110;
PORTB = PORTB | 0b00110000;
// set PORTC for DIGI select
DDRC = 0b0000011;
PINC = 0b0000011;
// set PORTD for display
DDRD = 0b11111111;
// Set 16-bit Timer 1 for clicking
TCCR1A = 0x00;
TCCR1B = (_BV(WGM12) | _BV(CS12) | _BV(CS10)); // Divide clock by 1024, CTC mode
OCR1A = (countUp*60)/speed; // Set top of counter
TIMSK1 = _BV(OCIE1A); // Enable OCR1A interrupt
// Set Timer 0 to check button press
TCCR0A = _BV(WGM01);
TCCR0B = _BV(CS00) | _BV(CS02);
OCR0A = 100; // OCCR0A can be adjusted to change the button debounce time
TIMSK0 = _BV(OCIE0A);
sei(); // Enable interrupts
}
// This will output the corresponding
// 'number' to digit 0 (left) or 1 (right)
void display(int digit, int number)
{
//cbi(PORTC, digit); // Ties display to ground
if (digit == 0)
sbi(PORTC, 0); // Ties display to ground
else if (digit == 1)
sbi(PORTC, 1);
switch(number) // Set PIND, display pins, to correct output
{
case 0:
PORTD = 0b11000000;
break;
case 1:
PORTD = 0b11111001;
break;
case 2:
PORTD = 0b10100100;
break;
case 3:
PORTD = 0b10110000;
break;
case 4:
PORTD = 0b10011001;
break;
case 5:
PORTD = 0b10010010;
break;
case 6:
PORTD = 0b10000010;
break;
case 7:
PORTD = 0b11111000;
break;
case 8:
PORTD = 0b10000000;
break;
case 9:
PORTD = 0b10010000;
break;
}
// Turn decimal point on if above 100 & 200
if ((digit == 0) && (speed >= 200))
cbi(PORTD, 7);
if ((digit == 1) && (speed >= 100))
cbi(PORTD, 7);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc