Magnetometers HMC5883L
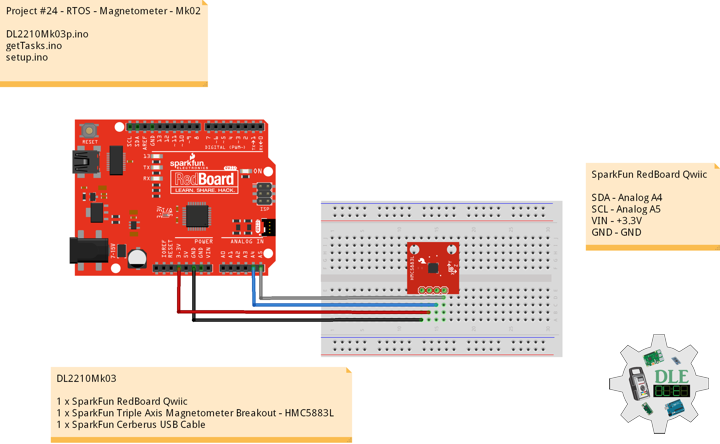
Project #24 – RTOS – Magnetometers HMC5883L – Mk02
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #RTOS #FreeRTOS #Magnetometer #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
SparkFun Triple Axis Magnetometer Breakout – HMC5883L
This is a breakout board for Honeywell’s HMC5883L, a 3-axis digital compass. Communication with the HMC5883L is simple and all done through an I2C interface. There is no on-board regulator, so a regulated voltage of 2.16-3.6VDC should be supplied. The breakout board includes the HMC5883L sensor and all filtering capacitors as shown. The power and 2-wire interface pins are all broken out to a 0.1″ pitch header.
Magnetometers have a wide range of uses. The most common include using the chip as a digital compass to sense direction or using them to detect ferrous (magnetic) metals. Magnetic fields and current go hand-in-hand. When current flows through a wire, a magnetic field is created. This is the basic principle behind electromagnets. This is also the principle used to measure magnetic fields with a magnetometer. The direction of Earth’s magnetic fields affects the flow of electrons in the sensor, and those changes in current can be measured and calculated to derive a compass heading or other useful information.
DL2210Mk03
1 x SparkFun RedBoard Qwiic
1 x SparkFun Triple Axis Magnetometer Breakout – HMC5883L
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
DL2210Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #24 - RTOS - Magnetometer - Mk02
24-02
DL2210Mk03p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Triple Axis Magnetometer Breakout - HMC5883L
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// FreeRTOS
#include <Arduino_FreeRTOS.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// Define two tasks for Triple Axis Magnetometer
void isTaskMagnetometer( void *pvParameters );
// Software Version Information
String sver = "24-02";
void loop() {
// Empty. Things are done in Tasks.
}
getTasks.ino
// Tasks
// Setup Task
void isSetupTask(){
// Now set up one tasks to run independently
// Magnetometer
//xTaskCreatePinnedToCore(
xTaskCreate(
isTaskMagnetometer
, "Magnetometer"
, 128 // Stack size
, NULL
, 1 // Priority
, NULL);
// Now the task scheduler, which takes over control of scheduling individual tasks,
// is automatically started.
}
// This is a Task Magnetometer Serial
void isTaskMagnetometer(void *pvParameters)
{
(void) pvParameters;
// Triple Axis Magnetometer
HMC5883L compass;
// Magnetometer Serial
// Initialize HMC5883L
Serial.println("Initialize HMC5883L");
while (!compass.begin())
{
Serial.println("Could not find a valid HMC5883L sensor, check wiring!");
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
for (;;)
{
// Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
Serial.print("Xnorm = ");
Serial.print(norm.XAxis);
Serial.print(" Ynorm = ");
Serial.print(norm.YAxis);
Serial.print(" ZNorm = ");
Serial.print(norm.ZAxis);
Serial.println();
// One tick delay in between reads
vTaskDelay(500);
}
}
setup.ino
// Setup
void setup() {
// Initialize serial communication
// at 9600 bits per second:
Serial.begin(9600);
// Setup Task
isSetupTask();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc