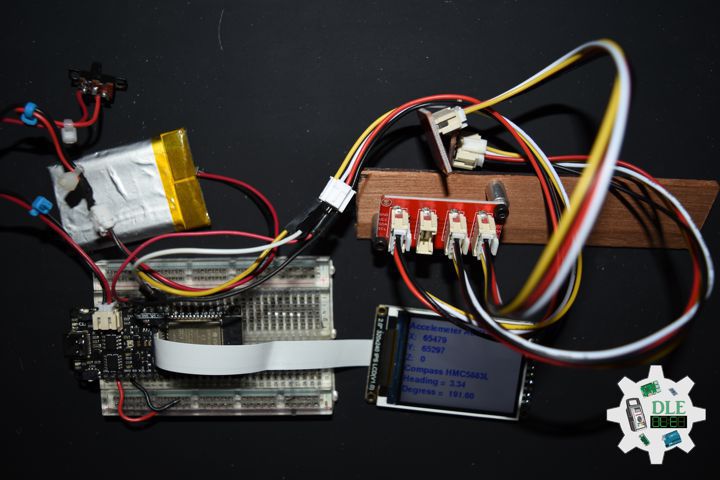
Magnetometer
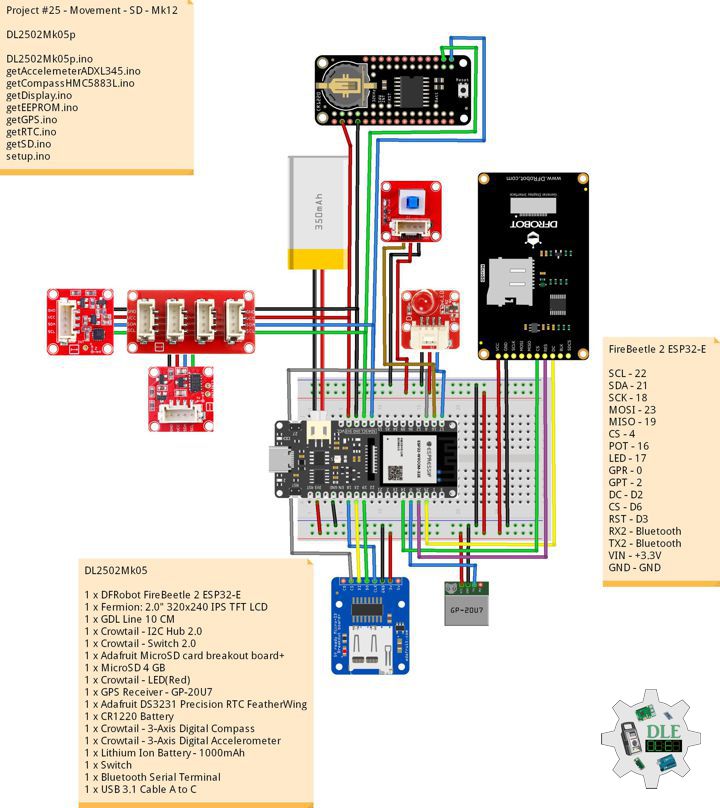
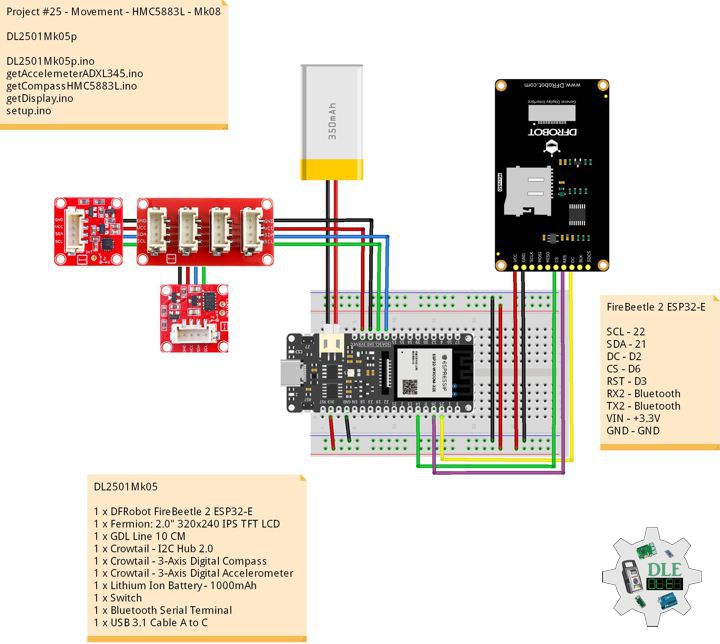
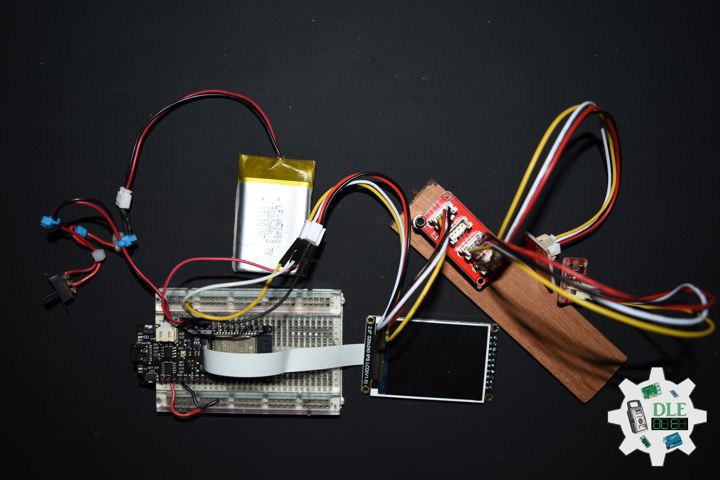
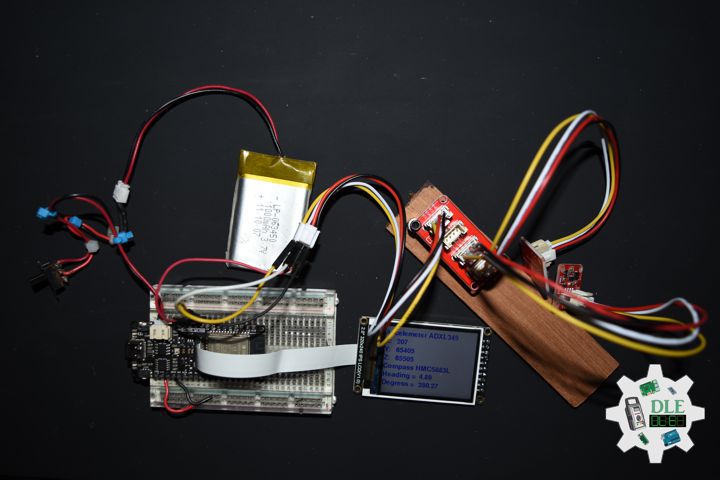
Project #25 – Movement – SD – Mk12
——
#DonLucElectronics #DonLuc #SD #GPS #RTC #EEPROM #Compass #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
MicroSD Card Module
There are different microSD card modules compatible with the ESP32. We’re using the microSD card module it communicates using SPI communication protocol. You can use any other microSD card module with an SPI interface. This microSD card module is also compatible with other microcontrollers like the Arduino boards. To learn how to use the microSD card module with the Arduino. You can connect it to the ESP32 using the default SPI pins.
DL2502Mk05
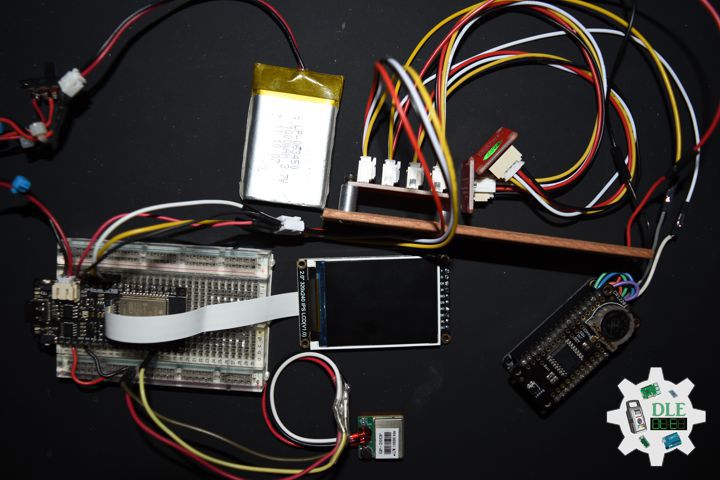
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – Switch 2.0
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 4 GB
1 x Crowtail – LED(Red)
1 x GPS Receiver – GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
SCK – 18
MOSI – 23
MISO – 19
CS – 4
POT – 16
LED – 17
GPR – 0
GPT – 2
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2502Mk05p
DL2502Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - SD - Mk12
25-12
DL2502Mk05p.ino
DL2502Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - Switch 2.0
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 4 GB
1 x Crowtail - LED(Red)
1 x GPS Receiver - GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// RTC (Real-Time Clock)
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// Define LED Red
int iLED = 17;
// Switch
int iSwitch = 16;
// Variable for reading the Switch status
int iSwitchState = 0;
// MicroSD Card
const int chipSelect = 4;
String zzzzzz = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(1);
// GPS Receiver
#define gpsRXPIN 0
// This one is unused and doesnt have a conection
#define gpsTXPIN 2
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALTM;
// GPS Altitude Feet
String TargetALTF;
// GPS Status
String GPSSt = "";
// RTC (Real-Time Clock)
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
String tempRTC = "";
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-12";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// RTC (Real-Time Clock)
isRTC();
// isGPS
isGPS();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// LED Red HIGH
digitalWrite(iLED, HIGH);
// MicroSD Card
isSD();
} else {
// LED Red LOW
digitalWrite(iLED, LOW);
}
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// SD
screen.setCursor(0, 60);
screen.println("SD");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter and Compass, ADXL345 and HMC5883L
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALTM = "";
TargetALTF = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALTM = String( z, DEC);
// Feet
int zz = gps.altitude.feet();
TargetALTF = String( zz, DEC);
}
}
getRTC.ino
// RTC (Real-Time Clock)
// Setup RTC
void isSetupRTC(){
// RTC (Real-Time Clock)
rtc.begin();
// RTC Lost Power
if (rtc.lostPower()) {
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0))
}
}
// RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// Temperature
tempRTC = rtc.getTemperature();
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DLE|EEPROM Unique ID|Version|Date|Time|Temperature|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Compass Heading|Compass Degress|
//GPS|Latitude|Longitude|GPS Date|GPS Time|
//GPS Speed M/S|GPS Speed Km/h|
//GPS Altitude Feet|GPS Altitude Meters|*\r
zzzzzz = "DLE|" + uid + "|" + sver + "|" + String( dateRTC ) + "|"
+ String( timeRTC ) + "|" + String( tempRTC ) + "|"
+ String(x) + "|" + String(y) + "|" + String(z) + "|"
+ String(ax) + "|" + String(ay) + "|" + String(az) + "|"
+ String( heading ) + "|" + String( headingDegrees ) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|" + String(TargetLon) + "|"
+ String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetSKH) + "|"
+ String(TargetALTF) + "|" + String(TargetALTM)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dledata.txt", msg );
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// zzzzzz
FullString = zzzzzz;
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2502Mk05");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// Wire
Wire.begin();
// Delay
delay(100);
// Setup RTC
isSetupRTC();
// Delay
delay(100);
//MicroSD Card
isSetupSD();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// iLED Red
pinMode(iLED, OUTPUT);
// LED Red LOW
digitalWrite(iLED, LOW);
// Delay
delay( 100 );
// Switch
pinMode(iSwitch,INPUT);
// Delay
delay( 100 );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
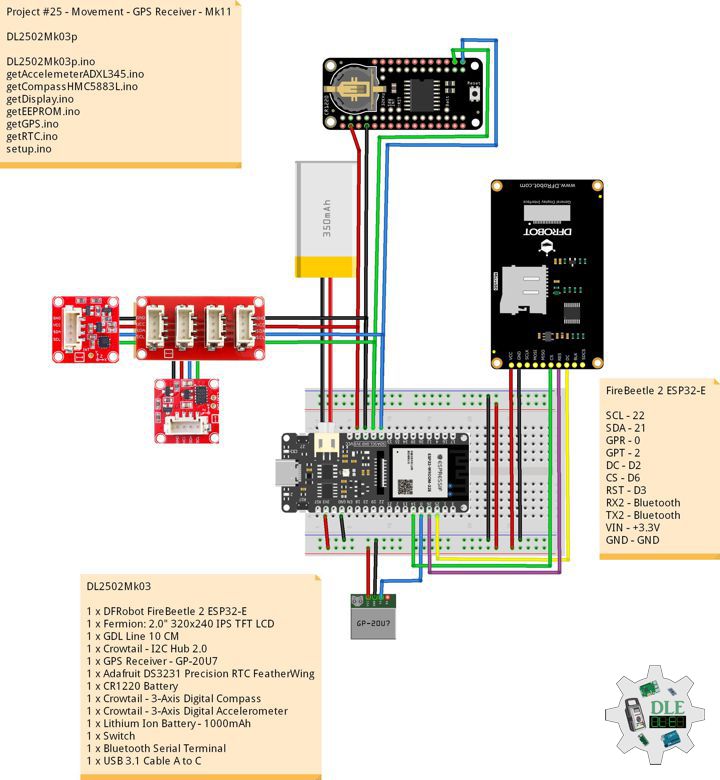
Project #25 – Movement – GPS Receiver – Mk11
——
#DonLucElectronics #DonLuc #GPS #RTC #EEPROM #Compass #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Global Positioning System (GPS)
The Global Positioning System (GPS) is a satellite-based radionavigation system owned by the United States government and operated by the United States Space Force. It is one of the global navigation satellite systems (GNSS) that provides geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. Obstacles such as mountains and buildings block the relatively weak GPS signals.
GPS Receiver – GP-20U7
The GP-20U7 is a compact GPS receiver with a built-in high performances All-In-One GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
DL2502Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x GPS Receiver – GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
GPR – 0
GPT – 2
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2502Mk03p
DL2502Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - GPS Receiver - Mk11
25-11
DL2502Mk03p.ino
DL2502Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x GPS Receiver - GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// RTC (Real-Time Clock)
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// ESP32 HardwareSerial
HardwareSerial tGPS(1);
// GPS Receiver
#define gpsRXPIN 0
// This one is unused and doesnt have a conection
#define gpsTXPIN 2
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALTM;
// GPS Altitude Feet
String TargetALTF;
// GPS Status
String GPSSt = "";
// RTC (Real-Time Clock)
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-11";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// isEEPROM
isEEPROM();
// RTC (Real-Time Clock)
isRTC();
// isGPS
isGPS();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// GPS Receiver
screen.setCursor(0, 60);
screen.println("GPS Receiver");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter and Compass, ADXL345 and HMC5883L
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
// isEEPROM
void isEEPROM(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// EEPROM
FullString = "EEPROM = " + String( uid ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Latitude
FullString = "Latitude = " + String( TargetLat ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Longitude
FullString = "Longitude = " + String( TargetLon ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// GPS Status
FullString = "GPS Status = " + String( GPSSt ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Date
FullString = "Date = " + String( TargetDat ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// FullString
// Time
FullString = "Time = " + String( TargetTim ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// FullString
// GPS Speeds M/S
FullString = "GPS Speeds M/S = " + String( TargetSMS ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// GPS Speeds Km/h
FullString = "GPS Speeds Km/h = " + String( TargetSKH ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Altitude
TargetALTM = "";
TargetALTF = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALTM = String( z, DEC);
// Feet
int zz = gps.altitude.feet();
TargetALTF = String( zz, DEC);
}
// FullString
//GPS Altitude Meters
FullString = "GPS Altitude Meters = " + String( TargetALTM ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// GPS Altitude Feet
FullString = "GPS Altitude Feet = " + String( TargetALTF ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getRTC.ino
// RTC (Real-Time Clock)
// Setup RTC
void isSetupRTC(){
// RTC (Real-Time Clock)
rtc.begin();
// RTC Lost Power
if (rtc.lostPower()) {
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0))
}
}
// RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Date
FullString = "Date = " + String( timeRTC ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Time
FullString = "Time = " + String( dateRTC ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Temperature
FullString = "Temperature = " + String( rtc.getTemperature() )
+ String( " C" ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2502Mk03");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// Wire
Wire.begin();
// Delay
delay(100);
// Setup RTC
isSetupRTC();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #25 – Movement – EEPROM – Mk09
——
#DonLucElectronics #DonLuc #EEPROM #HMC5883L #Compass #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
EEPROM
EEPROM (Electrically Erasable Programmable Read-only Memory) is a type of non-volatile memory. EEPROM is a type of non-volatile ROM that enables individual bytes of data to be erased and reprogrammed. That is why EEPROM chips are known as byte erasable chips. EEPROM is usually used to store small amounts of data in computing and other electronic devices. It is used in computers, usually integrated in microcontrollers such as smart cards and remote keyless systems, or as a separate chip device, to store relatively small amounts of data by allowing individual bytes to be erased and reprogrammed.
The microcontroller on the Arduino boards have 512 bytes of EEPROM: memory whose values are kept when the board is turned off. Functions in the EEPROM class are automatically included with the platform for your board, meaning you do not need to install any external libraries. The supported microcontrollers on the various Arduino have different amounts of EEPROM: 1024 bytes on the ATmega328P, 512 bytes on the ATmega168 and ATmega8, 4 KB (4096 bytes) on the ATmega1280 and ATmega2560. The Arduino boards have an emulated EEPROM space of 1024 bytes. The EEPROM library on ESP32 provides a reliable way to store data persistently, so that it remains accessible even when the power supply is disconnected. Unlike RAM, the data we save with the EEPROM library does not get lost when power is cut. This feature makes it an ideal choice for retaining configurations, settings, and other important data in embedded devices like the ESP32.
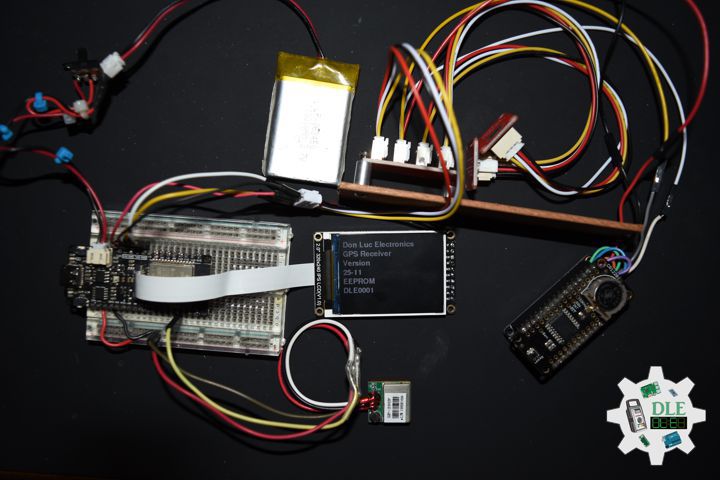
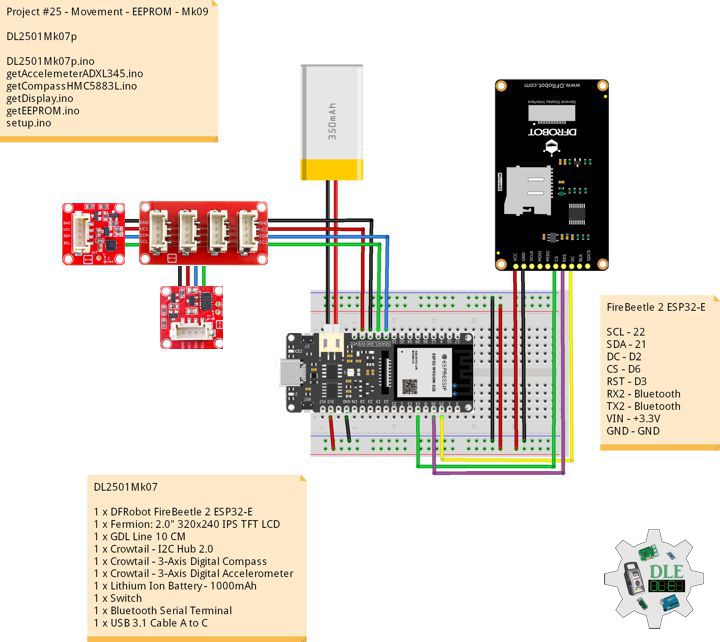
DL2501Mk07
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DLE-EEPROM-UID-ESP32Mk001
DLE-EEPROM-UID-ESP32Mk001.ino
/* ***** Don Luc Electronics © ******
Software Version Information
DLE-EEPROM-UID-ESP32Mk001
ver: ESPMk001
EEPROM with unique ID
*/
// Include Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include "EEPROM.h"
// The current address in the EEPROM (i.e. which byte
// we're going to write to next)
#define EEPROM_SIZE 64
// Software Version Information
String sver = "ESPMk001";
// Unit ID information
String uid = "DLE0001";
// Read Unique ID
// String ruid = "";
void loop()
{
// <== Write and Read EEPROM
isEEPROMw();
}
getEEPROM.ino
// getEEPROM
// Write and Read EEPROM with Unique ID for Unit
void isEEPROMw() {
// EEPROM
int incb = 0;
int v = 0;
String msg = "";
String emp = "";
String ruid = "";
// Set Unit ID
// The message starts with sid then is followed by 5 characters
// First clear a string buffer
emp = "";
// Loop through the 7 ID characters and write their ASCII (byte) value to the EEPROM
for (int x = 0; x < 7; x++)
{
// Get ASCII value of character
v = int(uid.charAt(x)); // + 5));
// Add the actual character to the buffer so we can send it back to the PC
emp = emp + uid.charAt(x + 5);
// Write the value to the EEPROM
EEPROM.write(x, v);
EEPROM.commit();
}
delay( 500 );
// Write EEPROM with Unique ID for Unit
Serial.println( "Write ID Information");
// Read ID Information
// Unit ID
for (int y = 0; y < 7; y++)
{
ruid = ruid + char(EEPROM.read(y));
}
// Read ID Information
Serial.print( "Read ID Information: ");
Serial.println( ruid );
Serial.println( "Ok!" );
ruid = "";
delay( 5000 );
}
setup.ino
// Setup
void setup()
{
// EEPROM with unique ID
EEPROM.begin(EEPROM_SIZE);
// Open the serial port at 9600 bps:
Serial.begin(9600);
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
}
——
DL2501Mk07p
DL2501Mk07p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - EEPROM - Mk09
25-09
DL2501Mk07p.ino
DL2501Mk07
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-09";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// isEEPROM
isEEPROM();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// EEPROM
screen.setCursor(0, 60);
screen.println("EEPROM");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter ADXL345
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
// isEEPROM
void isEEPROM(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// EEPROM
FullString = "EEPROM = " + String( uid ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk07");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #25 – Movement – HMC5883L – Mk08
——
#DonLucElectronics #DonLuc #HMC5883L #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Crowtail – 3-Axis Digital Compass
Crowtail-3-Axis Compass module, a member of Crowtail family uses I²C based Honeywell HMC5883L digital compass. This ASIC is equipped with high resolution HMC118X magneto-resistive sensors and a 12-bit ADC. It provides compass heading accuracy up to 1° to 2°. Signal conditioning like amplification, automatic degaussing strap drivers and offset cancellation are inbuilt. This Crowtail module also includes a XC6206P332MR for power supply requirement. Hence user can connect any 3.3V to 6V DC power supply.
- -Crowtail compatible interface
- -3-Axis Magneto-resistive type sensors
- -I²C serial interface
- -1° to 2° Degree heading accuracy
- -Up to 116 Hz Maximum output rate
- -Built-In self test
- -Low cost compassing
- -Magnetometry
- -Pedestrian navigation
- -Hobby auto navigation
- -Compassing support for mobile devices and portable computers
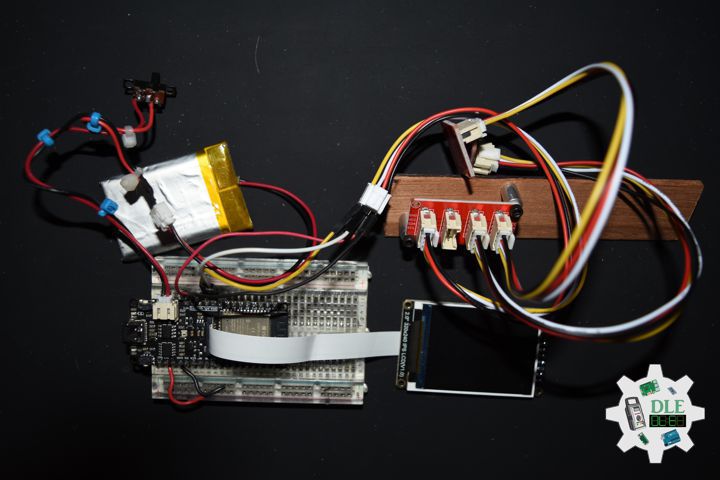
DL2501Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2501Mk05p
DL2501Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - HMC5883L - Mk08
25-08
DL2501Mk05p.ino
DL2501Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
String sver = "25-08";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Accelemeter ADXL345
screen.setCursor(0, 60);
screen.println("Compass HMC5883L");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
}
// Accelemeter ADXL345
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk05");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #29 – DFRobot – AltIMU-10 – Mk19
——
#DonLucElectronics #DonLuc #DFRobot #AltIMU10 #9DOF #GPS #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #Pololu #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
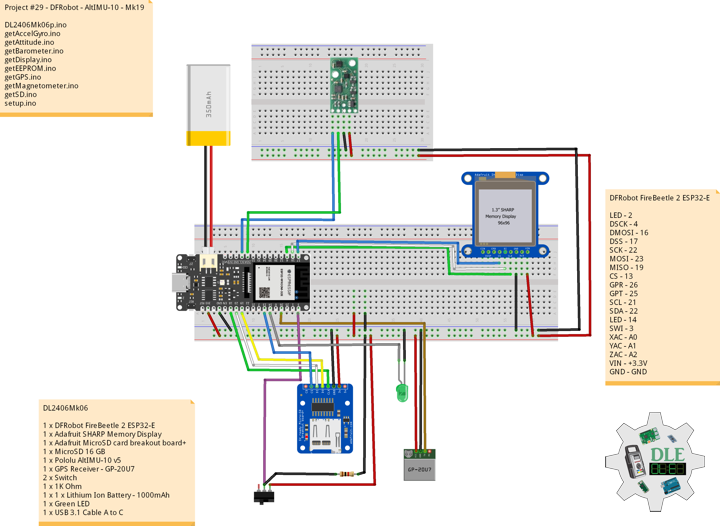
——
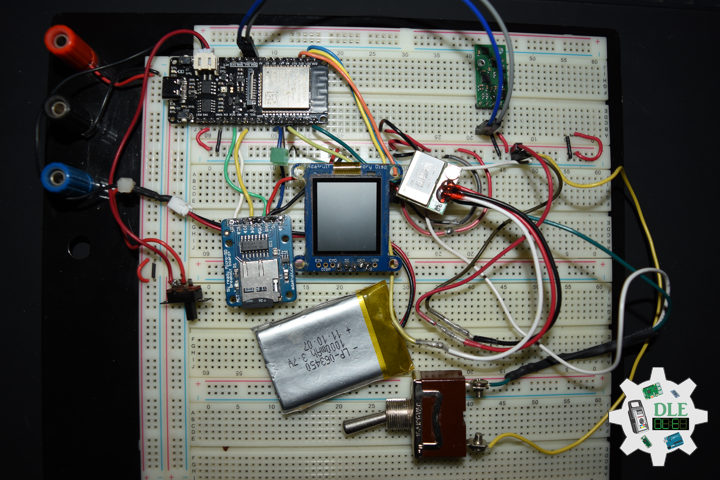
——
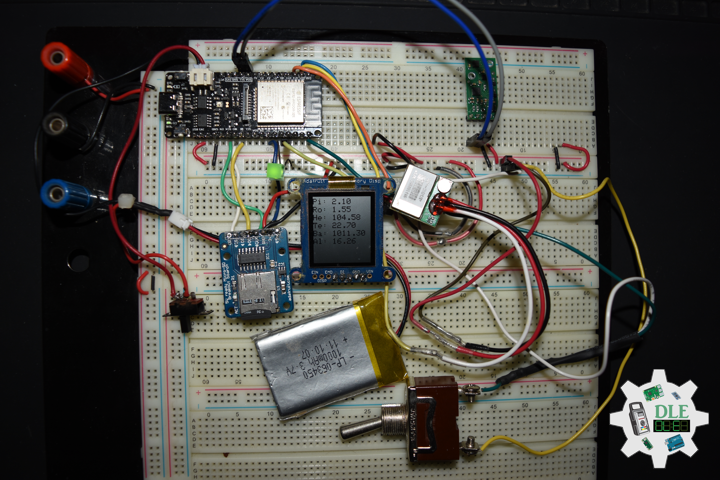
——
Pololu AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter
The Pololu AltIMU-10 v5 is a compact board that combines ST’s LSM6DS33 3-axis gyroscope and 3-axis accelerometer, LIS3MDL 3-axis magnetometer, and LPS25H digital barometer to form an inertial measurement unit (IMU) and altimeter. These sensors are great ICs, but their small packages make them difficult for the typical student or hobbyist to use. They also operate at voltages below 3.6 Volt, which can make interfacing difficult for microcontrollers operating at 5 Volt. The AltIMU-10 v5 addresses these issues by incorporating additional electronics, including a voltage regulator and a level-shifting circuit, while keeping the overall size as compact as possible. The board ships fully populated with its SMD components, including the LSM6DS33, LIS3MDL, and LPS25H.
Attitude and Heading Reference System (AHRS)
An attitude and heading reference system (AHRS) uses an inertial measurement unit (IMU) consisting of microelectromechanical system (MEMS) inertial sensors to measure the angular rate, acceleration, and Earth’s magnetic field. These measurements can then be used to derive an estimate of the object’s attitude. An AHRS typically includes a 3-axis gyroscope, a 3-axis accelerometer, and a 3-axis magnetometer to determine an estimate of a system’s orientation. Each of these sensors contribute different measurements to the combined system and each exhibit unique limitations.
DL2406Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Pololu AltIMU-10 v5
1 x GPS Receiver – GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
GPR – 26
GPT – 25
SCL – 21
SDA – 22
LED – 14
SWI – 3
XAC – A0
YAC – A1
ZAC – A2
VIN – +3.3V
GND – GND
——
DL2406Mk06p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - AltIMU-10 - Mk19
29-19
DL2406Mk06p.ino
DL2406Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Pololu AltIMU-10 v5
1 x GPS Receiver - GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL Magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital Barometer
#include <LPS.h>
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here: http://www.ngdc.noaa.gov/geomag-web/#declination
// Declination (degrees) in Mexicali
#define DECLINATION 10.31
// 9DoF IMU
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
//String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
// Attitude Calculate Pitch, Roll, and Headind
float r;
float p;
float h;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 26
// This one is unused and doesnt have a conection
#define gpsTXPIN 25
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-19";
void loop() {
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Attitude Calculate Pitch, Roll, and Heading
isAttitude(imuAX, imuAY, imuAZ, -imuGY, -imuGX, imuGZ);
// isGPS
isGPS();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Attitude Calculate Pitch, Roll, and Heading and Barometer
isDisplayAttitude();
} else {
// Display GPS
isDisplayGPS();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 5 Second
delay(5000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void isSetupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getAttitude.ino
// Attitude Calculate Pitch, Roll, and Heading
void isAttitude(float ax, float ay, float az, float mx, float my, float mz) {
// Attitude Calculate Pitch, Roll, and Heading
float roll = atan2(ay, az);
float pitch = atan2(-ax, sqrt(ay * ay + az * az));
float heading;
if (my == 0)
heading = (mx < 0) ? PI : 0;
else
heading = atan2(mx, my);
heading -= DECLINATION * PI / 180;
if (heading > PI) heading -= (2 * PI);
else if (heading < -PI) heading += (2 * PI);
// Convert everything from radians to degrees:
heading *= 180.0 / PI;
pitch *= 180.0 / PI;
roll *= 180.0 / PI;
h = heading;
p = pitch;
r = roll;
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Attitude Calculate Pitch, Roll, and Heading
void isDisplayAttitude() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Pitch
display.setCursor(0,5);
display.print( "Pi: " );
display.println( p );
// Roll
display.setCursor(0,25);
display.print( "Ro: " );
display.println( r );
// Heading
display.setCursor(0,45);
display.print( "He: " );
display.println( h );
// Temperature Celsius
display.setCursor(0,65);
display.print( "Te: " );
display.println( temperature );
// Barometer
display.setCursor(0,85);
display.print( "Ba: " );
display.println( pressure );
// Altitude Meters
display.setCursor(0,105);
display.print( "Al: " );
display.println( altitude );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Latitude
display.setCursor(0,5);
display.print( "Lat: " );
display.println( TargetLat );
// Longitude
display.setCursor(0,30);
display.print( "Lon: " );
display.println( TargetLon );
// GPS Date
display.setCursor(0,55);
display.println( TargetDat );
// GPS Time
display.setCursor(0,80);
display.println( TargetTim );
// GPS Speed M/S
display.setCursor(0,105);
display.print( TargetSMS );
display.println( " M/S" );
// GPS Altitude Meters
display.setCursor(0,130);
display.print( TargetALT );
display.println( " M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Gyroscope X|Gyroscope Y|Gyroscope Z|
//Magnetometer X|Magnetometer Y|Magnetometer Z|
//Pitch|Roll|Heading|
//Temperature C|Pressure Millibars|Altitude Meters|
//GPS|Latitude|Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Altitude|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String(imuAX) + "|" + String(imuAY) + "|" + String(imuAZ) + "|"
+ String(imuGX) + "|" + String(imuGY) + "|" + String(imuGZ) + "|"
+ String(magX) + "|" + String(magY) + "|" + String(magZ) + "|"
+ String(p) + "|" + String(r) + "|" + String(h) + "|"
+ String(temperature) + "|" + String(pressure) + "|" + String(altitude) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|"
+ String(TargetLon) + "|" + String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetALT)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
//MicroSD Card
isSetupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// Setup IMU
isSetupIMU();
// Setup Magnetometer
isSetupMag();
// Setup Barometer
isSetupBarometer();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #29 – DFRobot – L3G4200D – Mk18
——
#DonLucElectronics #DonLuc #DFRobot #L3G4200D #HMC5883L #ADXL335 #GPS #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #SparkFun #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
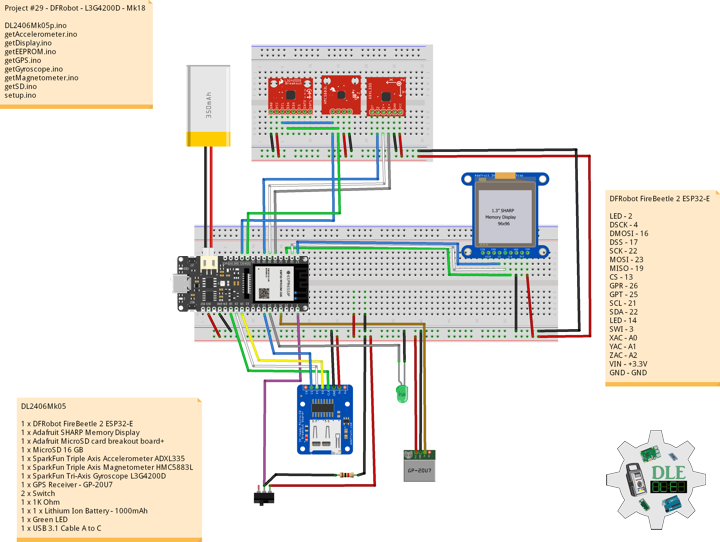
——
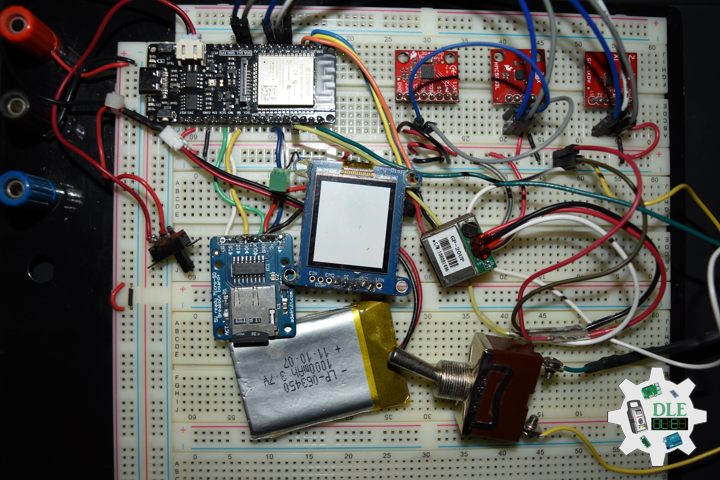
——
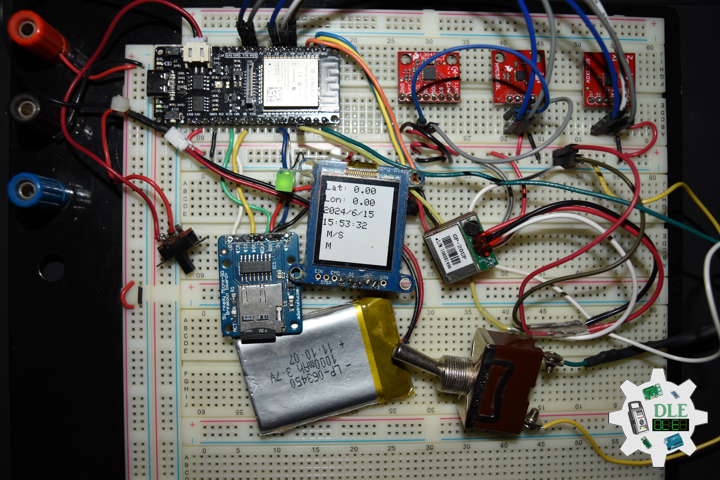
——
SparkFun Tri-Axis Gyroscope – L3G4200D
This is a breakout board for the L3G4200D low-power three-axis angular rate sensor. The L3G4200D is a MEMS motion sensor and has a full scale of dps and is capable of measuring rates with a user-selectable bandwidth. These work great in gaming and virtual reality input devices, motion control with MMI, GPS navigation systems, appliances and robotics. The L3G4200D is a low-power three-axis angular rate sensor able to provide unprecedented stablility of zero rate level and sensitivity over temperature and time. It includes a sensing element and an IC interface capable of providing the measured angular rate to the external world through a digital interface.
DL2406Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x SparkFun Triple Axis Magnetometer HMC5883L
1 x SparkFun Tri-Axis Gyroscope L3G4200D
1 x GPS Receiver – GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
GPR – 26
GPT – 25
SCL – 21
SDA – 22
LED – 14
SWI – 3
XAC – A0
YAC – A1
ZAC – A2
VIN – +3.3V
GND – GND
——
DL2406Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - L3G4200D - Mk18
29-18
DL2406Mk05p.ino
DL2406Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x SparkFun Triple Axis Magnetometer HMC5883L
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x SparkFun Tri-Axis Gyroscope L3G4200D
1 x GPS Receiver - GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// Gyroscope
#include <L3G4200D.h>
// Gyroscope
L3G4200D gyroscope;
// Timers
unsigned long timer = 0;
float timeStep = 0.01;
// Pitch, Roll and Yaw values
float pitch = 0;
float roll = 0;
float yaw = 0;
// Triple Axis Magnetometer
HMC5883L compass;
// Triple Axis Magnetometer
int mX = 0;
int mY = 0;
int mZ = 0;
// Accelerometer ADXL335
int iX = A0;
int iY = A1;
int iZ = A2;
// Accelerometer
int X = 0;
int Y = 0;
int Z = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 26
// This one is unused and doesnt have a conection
#define gpsTXPIN 25
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-18";
void loop() {
// isGPS
isGPS();
// Accelerometer ADXL335
isADXL335();
// Magnetometer
isMagnetometer();
// Gyroscope
isGyroscope();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Display Accelerometer ADXL335
isDisplayADXL335();
} else {
// Display GPS
isDisplayGPS();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 5 Second
delay(5000);
}
getAccelerometer.ino
// Accelerometer ADXL335
// ADXL335
void isADXL335() {
// Accelerometer ADXL335
// Accelerometer X, Y, Z
// X
X = analogRead(iX);
// Y
Y = analogRead(iY);
// Z
Z = analogRead(iZ);
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Accelerometer ADXL335
void isDisplayADXL335() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Accelerometer X
display.setCursor(0,5);
display.print( "AX: " );
display.println( X );
// Accelerometer Y
display.setCursor(0,20);
display.print( "AY: " );
display.println( Y );
// Accelerometer Z
display.setCursor(0,35);
display.print( "AZ: " );
display.println( Z );
// Magnetometer X
display.setCursor(0,50);
display.print( "MX: " );
display.println( mX );
// Magnetometer Y
display.setCursor(0,65);
display.print( "MY: " );
display.println( mY );
// Magnetometer Z
display.setCursor(0,80);
display.print( "MZ: " );
display.println( mZ );
// Gyroscope Pitch
display.setCursor(0,95);
display.print( "Pitch: " );
display.println( pitch );
// Gyroscope Roll
display.setCursor(0,110);
display.print( "Roll: " );
display.println( roll );
// Gyroscope Yaw
display.setCursor(0,125);
display.print( "Yaw: " );
display.println( yaw );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Latitude
display.setCursor(0,5);
display.print( "Lat: " );
display.println( TargetLat );
// Longitude
display.setCursor(0,30);
display.print( "Lon: " );
display.println( TargetLon );
// GPS Date
display.setCursor(0,55);
display.println( TargetDat );
// GPS Time
display.setCursor(0,80);
display.println( TargetTim );
// GPS Speed M/S
display.setCursor(0,105);
display.print( TargetSMS );
display.println( " M/S" );
// GPS Altitude Meters
display.setCursor(0,130);
display.print( TargetALT );
display.println( " M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getGyroscope.ino
// L3G4200D Triple Axis Gyroscope
// Setup Gyroscope
void isSetupGyroscope() {
// Setup Gyroscope
// Set scale 2000 dps and 400HZ Output data rate (cut-off 50)
while(!gyroscope.begin(L3G4200D_SCALE_2000DPS, L3G4200D_DATARATE_400HZ_50))
{
// Could not find a valid L3G4200D sensor, check wiring!
delay(500);
}
// Calibrate gyroscope. The calibration must be at rest.
// If you don't want calibrate, comment this line.
gyroscope.calibrate(100);
}
// L3G4200D Gyroscope
void isGyroscope(){
// Timer
timer = millis();
// Read normalized values
Vector norm = gyroscope.readNormalize();
// Calculate Pitch, Roll and Yaw
pitch = pitch + norm.YAxis * timeStep;
roll = roll + norm.XAxis * timeStep;
yaw = yaw + norm.ZAxis * timeStep;
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMagnetometer(){
// Magnetometer Serial
// Initialize HMC5883L
while (!compass.begin())
{
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
}
// Magnetometer
void isMagnetometer(){
// Magnetometer Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
// Magnetometer X Normalize
mX = norm.XAxis;
// Magnetometer Y Normalize
mY = norm.YAxis;
// Magnetometer Z Normalize
mZ = norm.ZAxis;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// DFR|EEPROM Unique ID|Version|Date|Time|
//Accelerometer X|Accelerometer Y|Accelerometer Z
//Magnetometer X|Magnetometer Y|Magnetometer Z
//Gyroscope Pitch|Gyroscope Roll|Gyroscope Yaw
//|GPS|Latitude|Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Altitude|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String(X) + "|" + String(Y) + "|" + String(Z) + "|"
+ String(mX) + "|" + String(mY) + "|" + String(mZ) + "|"
+ String(pitch) + "|" + String(roll) + "|" + String(yaw) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|"
+ String(TargetLon) + "|" + String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetALT)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
//MicroSD Card
isSetupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// Setup Triple Axis Magnetometer
isSetupMagnetometer();
// L3G4200D Gyroscope
isSetupGyroscope();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #29 – DFRobot – HMC5883L – Mk17
——
#DonLucElectronics #DonLuc #DFRobot #HMC5883L #ADXL335 #GPS #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #SparkFun #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
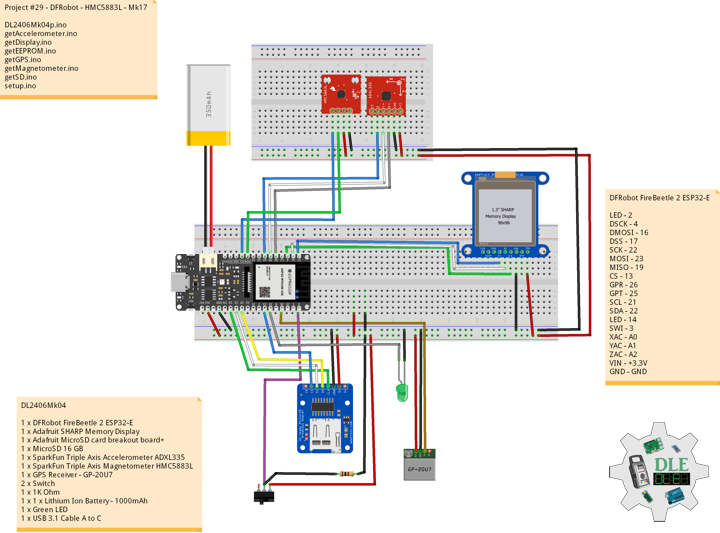
——
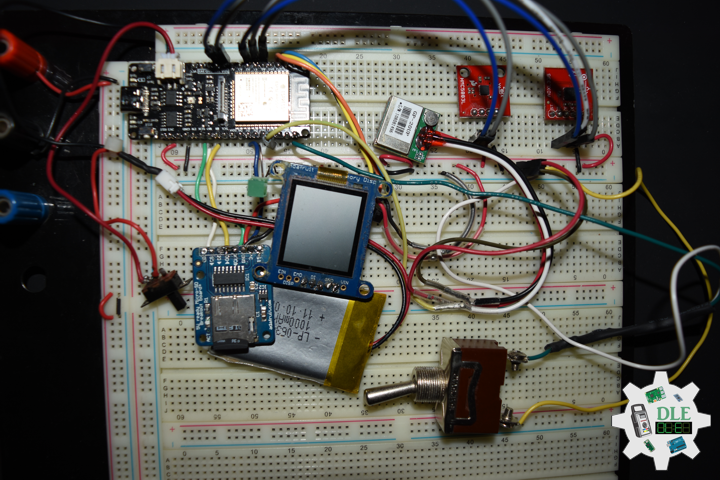
——
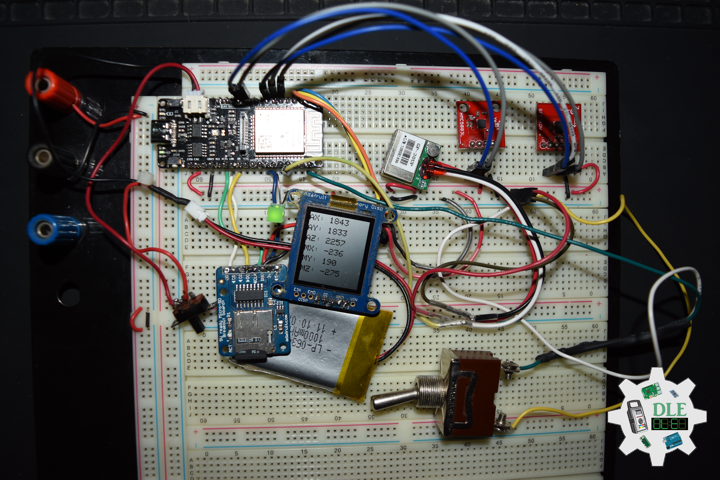
——
SparkFun Triple Axis Magnetometer Breakout – HMC5883L
This is a breakout board for Honeywell’s HMC5883L, a 3-axis digital compass. Communication with the HMC5883L is simple and all done through an I2C interface. There is no on-board regulator, so a regulated voltage of 2.16-3.6VDC should be supplied. The breakout board includes the HMC5883L sensor and all filtering capacitors as shown. The power and 2-wire interface pins are all broken out to a 0.1 inch pitch header.
DL2406Mk04
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x SparkFun Triple Axis Magnetometer HMC5883L
1 x GPS Receiver – GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
GPR – 26
GPT – 25
SCL – 21
SDA – 22
LED – 14
SWI – 3
XAC – A0
YAC – A1
ZAC – A2
VIN – +3.3V
GND – GND
——
DL2406Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - HMC5883L - Mk17
29-17
DL2406Mk04p.ino
DL2406Mk04
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x SparkFun Triple Axis Magnetometer HMC5883L
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x GPS Receiver - GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// Triple Axis Magnetometer
HMC5883L compass;
// Triple Axis Magnetometer
int mX = 0;
int mY = 0;
int mZ = 0;
// Accelerometer ADXL335
int iX = A0;
int iY = A1;
int iZ = A2;
// Accelerometer
int X = 0;
int Y = 0;
int Z = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 26
// This one is unused and doesnt have a conection
#define gpsTXPIN 25
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-17";
void loop() {
// isGPS
isGPS();
// Accelerometer ADXL335
isADXL335();
// Magnetometer
isMagnetometer();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Display Accelerometer ADXL335
isDisplayADXL335();
} else {
// Display GPS
isDisplayGPS();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 5 Second
delay(5000);
}
getAccelerometer.ino
// Accelerometer ADXL335
// ADXL335
void isADXL335() {
// Accelerometer ADXL335
// Accelerometer X, Y, Z
// X
X = analogRead(iX);
// Y
Y = analogRead(iY);
// Z
Z = analogRead(iZ);
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Accelerometer ADXL335
void isDisplayADXL335() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Accelerometer X
display.setCursor(0,5);
display.print( "AX: " );
display.println( X );
// Accelerometer Y
display.setCursor(0,30);
display.print( "AY: " );
display.println( Y );
// Accelerometer Z
display.setCursor(0,55);
display.print( "AZ: " );
display.println( Z );
// Magnetometer X
display.setCursor(0,80);
display.print( "MX: " );
display.println( mX );
// Magnetometer Y
display.setCursor(0,105);
display.print( "MY: " );
display.println( mY );
// Magnetometer Z
display.setCursor(0,130);
display.print( "MZ: " );
display.println( mZ );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Latitude
display.setCursor(0,5);
display.print( "Lat: " );
display.println( TargetLat );
// Longitude
display.setCursor(0,30);
display.print( "Lon: " );
display.println( TargetLon );
// GPS Date
display.setCursor(0,55);
display.println( TargetDat );
// GPS Time
display.setCursor(0,80);
display.println( TargetTim );
// GPS Speed M/S
display.setCursor(0,105);
display.print( TargetSMS );
display.println( " M/S" );
// GPS Altitude Meters
display.setCursor(0,130);
display.print( TargetALT );
display.println( " M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMagnetometer(){
// Magnetometer Serial
// Initialize HMC5883L
while (!compass.begin())
{
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
}
// Magnetometer
void isMagnetometer(){
// Magnetometer Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
// Magnetometer X Normalize
mX = norm.XAxis;
// Magnetometer Y Normalize
mY = norm.YAxis;
// Magnetometer Z Normalize
mZ = norm.ZAxis;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// DFR|EEPROM Unique ID|Version|Date|Time|
//Accelerometer X|Accelerometer Y|Accelerometer Z
//Magnetometer X|Magnetometer Y|Magnetometer Z
//|GPS|Latitude|Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Altitude|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String(X) + "|" + String(Y) + "|" + String(Z) + "|"
+ String(mX) + "|" + String(mY) + "|" + String(mZ) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|"
+ String(TargetLon) + "|" + String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetALT)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
//MicroSD Card
isSetupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// Setup Triple Axis Magnetometer
isSetupMagnetometer();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #28 – Sensors – HC-SR04 – Mk12
——
#DonLucElectronics #DonLuc #Sensors #LSM9DS1 #IMU #GPSReceiver #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
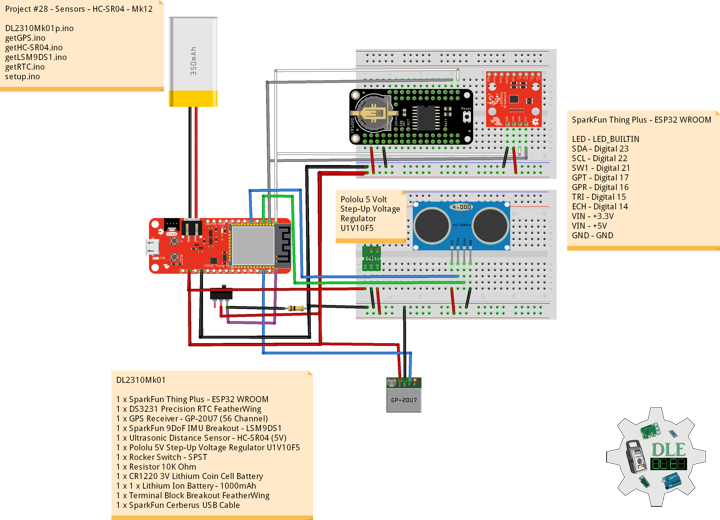
——
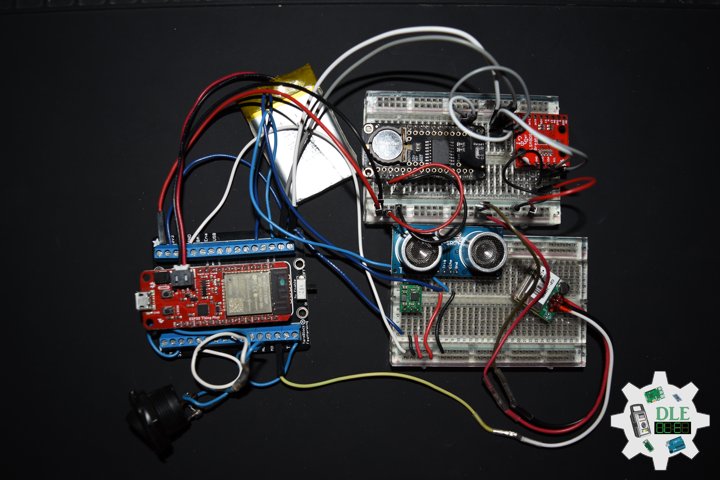
——
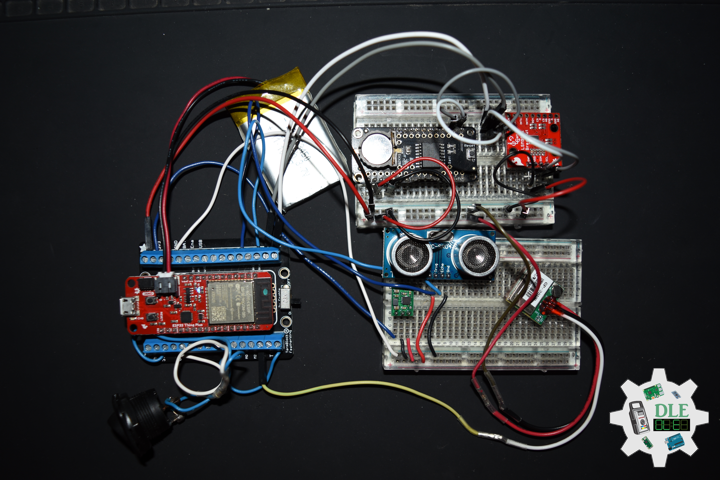
——
Pololu 5 Volt Step-Up Voltage Regulator U1V10F5
This tiny U1V10F5 switching step-up voltage regulator efficiently generates 5 Volt from input voltages as low as 0.5 Volt. Unlike most boost regulators, the U1V10F5 automatically switches to a linear down-regulation mode when the input voltage exceeds the output.
Ultrasonic Distance Sensor – HC-SR04 (5 Volt)
This is the HC-SR04 ultrasonic distance sensor. This economical sensor provides 2 Centimetres to 400 Centimetres of non-contact measurement functionality with a ranging accuracy that can reach up to 3 Millimetres. Each HC-SR04 module includes an ultrasonic transmitter, a receiver and a control circuit. There are only four pins that you need to worry about on the HC-SR04: VCC (Power), Trig (Trigger), Echo (Receive), and GND (Ground). This sensor has additional control circuitry that can prevent inconsistent “Bouncy” data depending on the application.
DL2310Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x GPS Receiver – GP-20U7 (56 Channel)
1 x SparkFun 9DoF IMU Breakout – LSM9DS1
1 x Ultrasonic Distance Sensor – HC-SR04 (5V)
1 x Pololu 5V Step-Up Voltage Regulator U1V10F5
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
SW1 – Digital 21
GPT – Digital 17
GPR – Digital 16
TRI – Digital 15
ECH – Digital 14
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2310Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - HC-SR04 - Mk12
28-12
DL2310Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun 9DoF IMU Breakout - LSM9DS1
1 x Ultrasonic Distance Sensor - HC-SR04 (5V)
1 x Pololu 5V Step-Up Voltage Regulator U1V10F5
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x Lithium Ion Battery - 1000mAh
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Serial Peripheral Interface
#include <SPI.h>
// DS3231 Precision RTC
#include <RTClib.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// LSM9DS1 9DOF Sensor
#include <SparkFunLSM9DS1.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Status
String GPSSt = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// LSM9DS1 9DOF Sensor
LSM9DS1 imu;
#define PRINT_CALCULATED
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here: http://www.ngdc.noaa.gov/geomag-web/#declination
// Declination (degrees) in El Centro, CA
#define DECLINATION 10.4
// Gyro
float fGyroX;
float fGyroY;
float fGyroZ;
// Accel
float fAccelX;
float fAccelY;
float fAccelZ;
// Mag
float fMagX;
float fMagY;
float fMagZ;
// Attitude
float fRoll;
float fPitch;
float fHeading;
// HC-SR04 Ultrasonic Sensor
int iTrig = 15;
int iEcho = 14;
// Stores the distance measured by the distance sensor
float distance = 0;
// The number of the Rocker Switch pin
int iSwitch = 21;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-12";
void loop() {
// Date and Time RTC
isRTC ();
// isGPS
isGPS();
// GPS Keyboard
isGPSKeyboard();
// Gyro
isGyro();
// Accel
isAccel();
// Mag
isMag();
// Attitude
isAttitude();
// HC-SR04 Ultrasonic Sensor
isHCSR04();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
//tGPS.begin( 9600 );
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
TargetLat = 0;
TargetLon = 0;
}
}
// GPS Date, Time
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
}
// GPS Keyboard
void isGPSKeyboard(){
// GPS Keyboard
// bleKeyboard
// GPS Vector Pointer Target
sKeyboard = sKeyboard + GPSSt + "|" + String(TargetLat)
+ "|" + String(TargetLon) + "|";
// bleKeyboard
// GPS Date, Time
sKeyboard = sKeyboard + TargetDat + "|" +
TargetTim + "|";
}
getHC-SR04.ino
// HC-SR04 Ultrasonic Sensor
// Setup HC-SR04
void isSetupHCSR04() {
// The trigger iTrig will output pulses of electricity
pinMode(iTrig, OUTPUT);
// The echo iEcho will measure the duration of pulses coming back from the distance sensor
pinMode(iEcho, INPUT);
}
// HC-SR04
void isHCSR04() {
// Variable to store the distance measured by the sensor
distance = isDistance();
sKeyboard = sKeyboard + String(distance) + " cm|*";
}
// Distance
float isDistance() {
// Variable to store the time it takes for a ping to bounce off an object
float echoTime;
// Variable to store the distance calculated from the echo time
float calculatedDistance;
// Send out an ultrasonic pulse that's 10ms long
digitalWrite(iTrig, HIGH);
delayMicroseconds(10);
digitalWrite(iTrig, LOW);
// Use the pulseIn command to see how long it takes for the
// pulse to bounce back to the sensor
echoTime = pulseIn(iEcho, HIGH);
// Calculate the distance of the object that reflected the pulse
// (half the bounce time multiplied by the speed of sound)
// cm = 58.0
calculatedDistance = echoTime / 58.0;
// Send back the distance that was calculated
return calculatedDistance;
}
getLSM9DS1.ino
// LSM9DS1 9DOF Sensor
// Gyro
void isGyro(){
// Update the sensor values whenever new data is available
if ( imu.gyroAvailable() )
{
// To read from the gyroscope, first call the
// readGyro() function. When it exits, it'll update the
// gx, gy, and gz variables with the most current data.
imu.readGyro();
// If you want to print calculated values, you can use the
// calcGyro helper function to convert a raw ADC value to
// DPS. Give the function the value that you want to convert.
fGyroX = imu.calcGyro(imu.gx);
fGyroY = imu.calcGyro(imu.gy);
fGyroZ = imu.calcGyro(imu.gz);
// bleKeyboard
// Gyro
sKeyboard = sKeyboard + String(fGyroX) + "|" + String(fGyroY)
+ "|" + String(fGyroZ) + "|";
}
}
// Accel
void isAccel(){
// Update the sensor values whenever new data is available
if ( imu.accelAvailable() )
{
// To read from the accelerometer, first call the
// readAccel() function. When it exits, it'll update the
// ax, ay, and az variables with the most current data.
imu.readAccel();
// If you want to print calculated values, you can use the
// calcAccel helper function to convert a raw ADC value to
// g's. Give the function the value that you want to convert.
fAccelX = imu.calcAccel(imu.ax);
fAccelY = imu.calcAccel(imu.ay);
fAccelZ = imu.calcAccel(imu.az);
// bleKeyboard
// Accel
sKeyboard = sKeyboard + String(fAccelX) + "|" + String(fAccelY)
+ "|" + String(fAccelZ) + "|";
}
}
// Mag
void isMag(){
// Update the sensor values whenever new data is available
if ( imu.magAvailable() )
{
// To read from the magnetometer, first call the
// readMag() function. When it exits, it'll update the
// mx, my, and mz variables with the most current data.
imu.readMag();
// If you want to print calculated values, you can use the
// calcMag helper function to convert a raw ADC value to
// Gauss. Give the function the value that you want to convert.
fMagX = imu.calcMag(imu.mx);
fMagY = imu.calcMag(imu.my);
fMagZ = imu.calcMag(imu.mz);
// bleKeyboard
// Mag
sKeyboard = sKeyboard + String(fMagX) + "|" + String(fMagY)
+ "|" + String(fMagZ) + "|";
}
}
// Attitude
void isAttitude(){
// Attitude
// Roll
fRoll = atan2(fAccelY, fAccelZ);
// Pitch
fPitch = atan2(-fAccelX, sqrt(fAccelY * fAccelY + fAccelZ * fAccelZ));
// Heading
if (fMagY == 0) {
fHeading = (fMagX < 0) ? PI : 0;
}
else {
fHeading = atan2(fMagX, fMagY);
}
fHeading -= DECLINATION * PI / 180;
if (fHeading > PI) fHeading -= (2 * PI);
else if (fHeading < -PI) fHeading += (2 * PI);
// Convert everything from radians to degrees:
fHeading *= 180.0 / PI;
fPitch *= 180.0 / PI;
fRoll *= 180.0 / PI;
// bleKeyboard
// Attitude
sKeyboard = sKeyboard + String(fHeading) + "|" + String(fPitch)
+ "|" + String(fRoll) + "|";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void isSetupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// bleKeyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC)
+ "|" + String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
isSetupRTC();
// Give display time to power on
delay(100);
// GPS Receiver
// Setup GPS
isSetupGPS();
// LSM9DS1 9DOF Sensor
imu.begin();
// Setup HC-SR04
isSetupHCSR04();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #28 – Sensors – LSM9DS1 – Mk11
——
#DonLucElectronics #DonLuc #Sensors #LSM9DS1 #IMU #GPSReceiver #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
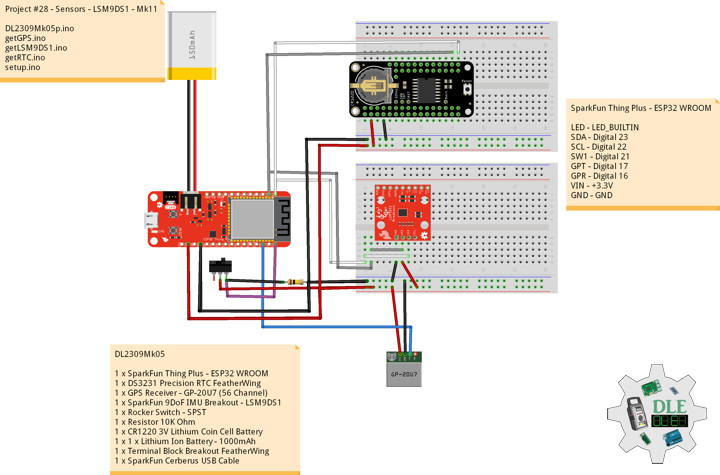
——
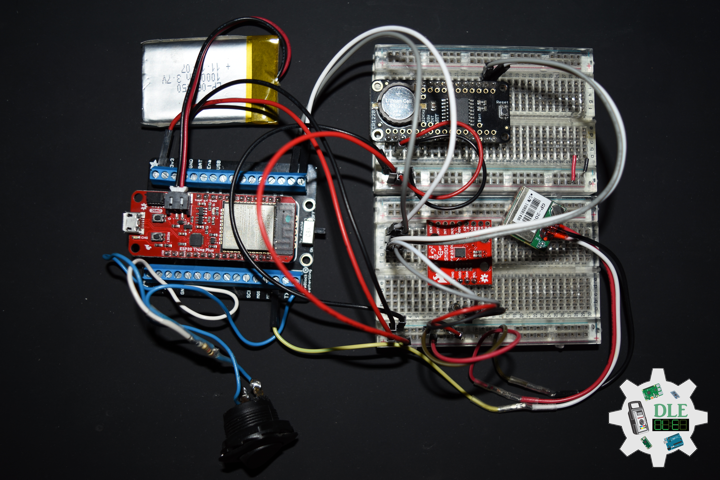
——
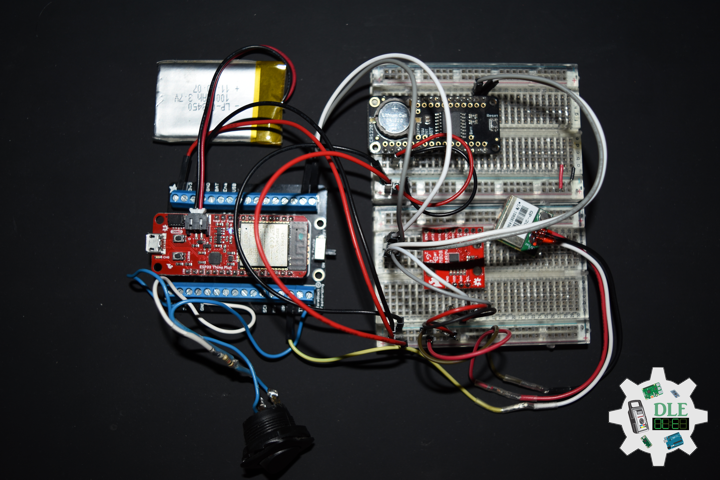
——
SparkFun 9DoF IMU Breakout – LSM9DS1
The SparkFun LSM9DS1 Breakout is a versatile, motion-sensing System-In-A-Chip. It houses a 3-axis accelerometer, 3-axis gyroscope, and 3-axis magnetometer, nine degrees of freedom (9DOF) on a single board. The LSM9DS1 from STMicroelectronics is equipped with a digital interface, but even that is flexible. This IMU-In-A-Chip is so cool we put it on the quarter-sized breakout board you are currently viewing.
The LSM9DS1 is one of only a handful of IC’s that can measure three key properties of movement, angular velocity, acceleration, and heading, in a single IC. By measuring these three properties, you can gain a great deal of knowledge about an object’s movement and orientation. The LSM9DS1 measures each of these movement properties in three dimensions. That means it produces nine pieces of data: acceleration in x/y/z, angular rotation in x/y/z, and magnetic force in x/y/z. The LSM9DS1 Breakout has labels indicating the accelerometer and gyroscope axis orientations, which share a right-hand rule relationship with each other.
DL2309Mk05
1 x SparkFun Thing Plus – ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x GPS Receiver – GP-20U7 (56 Channel)
1 x SparkFun 9DoF IMU Breakout – LSM9DS1
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
SW1 – Digital 21
GPT – Digital 17
GPR – Digital 16
VIN – +3.3V
GND – GND
——
DL2309Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - LSM9DS1 - Mk11
28-11
DL2309Mk05p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun 9DoF IMU Breakout - LSM9DS1
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x Lithium Ion Battery - 1000mAh
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Serial Peripheral Interface
#include <SPI.h>
// DS3231 Precision RTC
#include <RTClib.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// LSM9DS1 9DOF Sensor
#include <SparkFunLSM9DS1.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Status
String GPSSt = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// LSM9DS1 9DOF Sensor
LSM9DS1 imu;
#define PRINT_CALCULATED
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here: http://www.ngdc.noaa.gov/geomag-web/#declination
// Declination (degrees) in El Centro, CA
#define DECLINATION 10.4
// Gyro
float fGyroX;
float fGyroY;
float fGyroZ;
// Accel
float fAccelX;
float fAccelY;
float fAccelZ;
// Mag
float fMagX;
float fMagY;
float fMagZ;
// Attitude
float fRoll;
float fPitch;
float fHeading;
// The number of the Rocker Switch pin
int iSwitch = 21;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-11";
void loop() {
// Date and Time RTC
isRTC ();
// isGPS
isGPS();
// GPS Keyboard
isGPSKeyboard();
// Gyro
isGyro();
// Accel
isAccel();
// Mag
isMag();
// Attitude
isAttitude();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
//tGPS.begin( 9600 );
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
TargetLat = 0;
TargetLon = 0;
}
}
// GPS Date, Time
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
}
// GPS Keyboard
void isGPSKeyboard(){
// GPS Keyboard
// bleKeyboard
// GPS Vector Pointer Target
sKeyboard = sKeyboard + GPSSt + "|" + String(TargetLat)
+ "|" + String(TargetLon) + "|";
// bleKeyboard
// GPS Date, Time
sKeyboard = sKeyboard + TargetDat + "|" +
TargetTim + "|";
}
getLSM9DS1.ino
// LSM9DS1 9DOF Sensor
// Gyro
void isGyro(){
// Update the sensor values whenever new data is available
if ( imu.gyroAvailable() )
{
// To read from the gyroscope, first call the
// readGyro() function. When it exits, it'll update the
// gx, gy, and gz variables with the most current data.
imu.readGyro();
// If you want to print calculated values, you can use the
// calcGyro helper function to convert a raw ADC value to
// DPS. Give the function the value that you want to convert.
fGyroX = imu.calcGyro(imu.gx);
fGyroY = imu.calcGyro(imu.gy);
fGyroZ = imu.calcGyro(imu.gz);
// bleKeyboard
// Gyro
sKeyboard = sKeyboard + String(fGyroX) + "|" + String(fGyroY)
+ "|" + String(fGyroZ) + "|";
}
}
// Accel
void isAccel(){
// Update the sensor values whenever new data is available
if ( imu.accelAvailable() )
{
// To read from the accelerometer, first call the
// readAccel() function. When it exits, it'll update the
// ax, ay, and az variables with the most current data.
imu.readAccel();
// If you want to print calculated values, you can use the
// calcAccel helper function to convert a raw ADC value to
// g's. Give the function the value that you want to convert.
fAccelX = imu.calcAccel(imu.ax);
fAccelY = imu.calcAccel(imu.ay);
fAccelZ = imu.calcAccel(imu.az);
// bleKeyboard
// Accel
sKeyboard = sKeyboard + String(fAccelX) + "|" + String(fAccelY)
+ "|" + String(fAccelZ) + "|";
}
}
// Mag
void isMag(){
// Update the sensor values whenever new data is available
if ( imu.magAvailable() )
{
// To read from the magnetometer, first call the
// readMag() function. When it exits, it'll update the
// mx, my, and mz variables with the most current data.
imu.readMag();
// If you want to print calculated values, you can use the
// calcMag helper function to convert a raw ADC value to
// Gauss. Give the function the value that you want to convert.
fMagX = imu.calcMag(imu.mx);
fMagY = imu.calcMag(imu.my);
fMagZ = imu.calcMag(imu.mz);
// bleKeyboard
// Mag
sKeyboard = sKeyboard + String(fMagX) + "|" + String(fMagY)
+ "|" + String(fMagZ) + "|";
}
}
// Attitude
void isAttitude(){
// Attitude
// Roll
fRoll = atan2(fAccelY, fAccelZ);
// Pitch
fPitch = atan2(-fAccelX, sqrt(fAccelY * fAccelY + fAccelZ * fAccelZ));
// Heading
if (fMagY == 0) {
fHeading = (fMagX < 0) ? PI : 0;
}
else {
fHeading = atan2(fMagX, fMagY);
}
fHeading -= DECLINATION * PI / 180;
if (fHeading > PI) fHeading -= (2 * PI);
else if (fHeading < -PI) fHeading += (2 * PI);
// Convert everything from radians to degrees:
fHeading *= 180.0 / PI;
fPitch *= 180.0 / PI;
fRoll *= 180.0 / PI;
// bleKeyboard
// Attitude
sKeyboard = sKeyboard + String(fHeading) + "|" + String(fPitch)
+ "|" + String(fRoll) + "|*";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void setupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// bleKeyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC)
+ "|" + String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
setupRTC();
// Give display time to power on
delay(100);
// GPS Receiver
// Setup GPS
setupGPS();
// LSM9DS1 9DOF Sensor
imu.begin();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #28 – Sensors – SparkFun Environmental Combo CCS811/BME280 – Mk09
——
#DonLucElectronics #DonLuc #Sensors #CCS811 #BME280 #TSOP85 #TMP102 #LineSensor #AlcoholGasSensor #MinIMU9 #Pololu #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
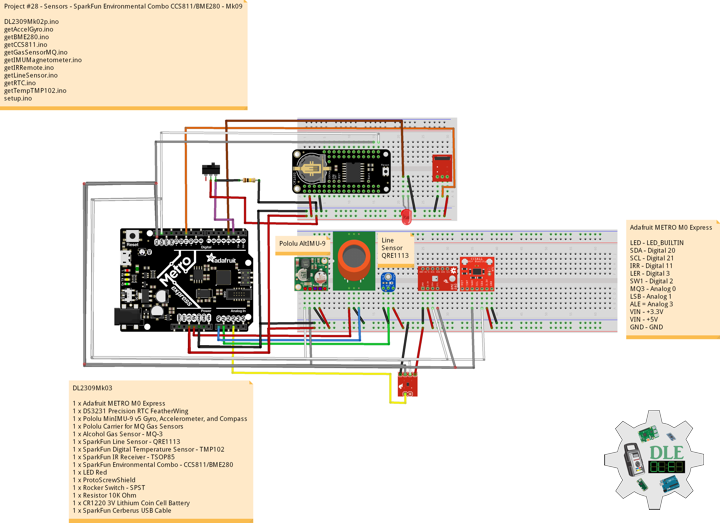
——
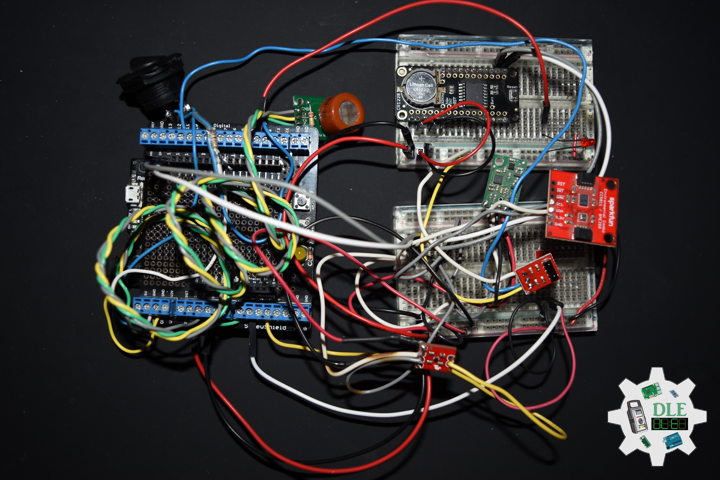
——
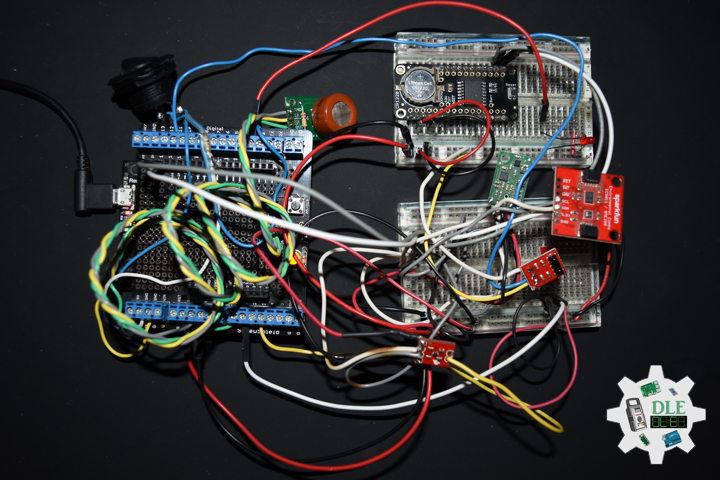
——
SparkFun Environmental Combo – CCS811/BME280
The SparkFun CCS811/BME280 Environmental Combo Breakout takes care of all your atmospheric-quality sensing needs with the popular CCS811 and BME280 ICs. This unique breakout provides a variety of environmental data, including barometric pressure, humidity, temperature, TVOCs and equivalent eCO2 levels.
The CCS811 is an exceedingly popular sensor, providing readings for equivalent eCO2 in the parts per million (PPM) and total volatile organic compounds in the parts per billion (PPB). The CCS811 also has a feature that allows it to fine-tune its readings if it has access to the current humidity and temperature. Luckily for us, the BME280 provides humidity, temperature and barometric pressure. This allows the sensors to work together to give us more accurate readings than they’d be able to provide on their own. We also made it easy to interface with them via I2C.
DL2309Mk03
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
1 x Pololu Carrier for MQ Gas Sensors
1 x Alcohol Gas Sensor – MQ-3
1 x SparkFun Line Sensor – QRE1113
1 x SparkFun Digital Temperature Sensor – TMP102
1 x SparkFun IR Receiver – TSOP85
1 x SparkFun Environmental Combo – CCS811/BME280
1 x LED Red
1 x ProtoScrewShield
1 x Rocker Switch – SPST
2 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
LED – LED_BUILTIN
SDA – Digital 20
SCL – Digital 21
IRR – Digital 11
LER – Digital 3
SW1 – Digital 2
MQ3 – Analog 0
LSB – Analog 1
ALE = Analog 3
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2309Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - SparkFun Environmental Combo CCS811/BME280 - Mk09
28-09
DL2309Mk03p.ino
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
1 x Pololu Carrier for MQ Gas Sensors
1 x Alcohol Gas Sensor - MQ-3
1 x SparkFun Line Sensor - QRE1113
1 x SparkFun Digital Temperature Sensor - TMP102
1 x SparkFun IR Receiver - TSOP85
1 x SparkFun Environmental Combo - CCS811/BME280
1 x LED Red
1 x ProtoScrewShield
1 x Rocker Switch - SPST
2 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// DS3231 Precision RTC
#include <RTClib.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Keyboard
#include <Keyboard.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL Magnetometer
#include <LIS3MDL.h>
// SparkFun Digital Temperature Sensor TMP102
#include <SparkFunTMP102.h>
// SparkFun IR Receiver - TSOP85
#include <IRremote.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Keyboard
String sKeyboard = "";
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Pololu 9DoF IMU
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL Magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// Gas Sensors MQ
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A0;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// SparkFun Line Sensor - QRE1113 (Analog)
int iLine = A1;
int iLineSensor = 0;
// SparkFun Digital Temperature Sensor TMP102
const int ALERT_PIN = A3;
TMP102 sensor0;
float temperature;
boolean alertPinState;
boolean alertRegisterState;
// SparkFun IR Receiver - TSOP85
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
String IRValue = "";
int iLEDRed = 3;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// The number of the Rocker Switch pin
int iSwitch = 2;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-09";
void loop() {
// Date and Time RTC
isRTC ();
// Pololu Accelerometer and Gyroscopes
isIMU();
// Pololu Magnetometer
isMag();
// Gas Sensors MQ
isGasSensor();
// SparkFun Line Sensor
isLineSensor();
// SparkFun Temperature TMP102
isTMP102();
// SparkFun IR Receiver - TSOP85
isIR();
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
Keyboard.println(sKeyboard);
}
// Delay 1 Second
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// Keyboard
sKeyboard = sKeyboard + String(imuAX) + "|" + String(imuAY) + "|"
+ String(imuAZ) + "|";
sKeyboard = sKeyboard + String(imuGX) + "|" + String(imuGY) + "|"
+ String(imuGZ) + "|";
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Keyboard
sKeyboard = sKeyboard + String(BMEtempC) + "|" + String(BMEhumid) + "|" +
String(BMEpressure) + "|" + String(BMEaltitudeM) + "|";
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// Keyboard
sKeyboard = sKeyboard + String(CCS811CO2) + "|" + String(CCS811TVOC) + "|*";
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
// Keyboard
sKeyboard = sKeyboard + String(iMQ3ppm) + "|";
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue;
// % BAC = breath mg/L * 0.21
double bac = RvRo * 0.21;
return bac;
}
getIMUMagnetometer.ino
// IMU Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// Keyboard
sKeyboard = sKeyboard + String(magX) + "|" + String(magY) + "|"
+ String(magZ) + "|";
}
getIRRemote.ino
// SparkFun IR Receiver - TSOP85
// Setup
void isSetupIR(){
// Initialize digital pin LED Red as an output
pinMode(iLEDRed, OUTPUT);
// Start the receiver
irrecv.enableIRIn();
}
//
void isIR(){
if (irrecv.decode(&results))
{
// LED Red HIGH
digitalWrite(iLEDRed, HIGH);
//Serial.print("IR RECV Code = 0x ");
//Serial.println(results.value, HEX);
IRValue = "0x ";
IRValue = IRValue + String(results.value, HEX);
// LED Red LOW
digitalWrite(iLEDRed, LOW);
// IR Resume
irrecv.resume();
}
else {
IRValue = "0";
}
// Keyboard
sKeyboard = sKeyboard + String(IRValue) + "|";
}
getLineSensor.ino
// Line Sensor
// isLine Sensor
void isLineSensor(){
// Line Sensor
iLineSensor = analogRead(iLine);
// Keyboard
sKeyboard = sKeyboard + String(iLineSensor) + "|";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void setupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// Keyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC) + "|" +
String(timeRTC) + "|";
}
getTempTMP102.ino
// SparkFun Digital Temperature Sensor TMP102
// Setup TMP102
void isSetupTMP102(){
// Declare alertPin as an input
pinMode(ALERT_PIN,INPUT);
// Begin
//It will return true on success or false on failure to communicate
if(!sensor0.begin())
{
while(1);
}
// set the Conversion Rate
//0-3: 0:0.25Hz, 1:1Hz, 2:4Hz, 3:8Hz
sensor0.setConversionRate(2);
//set Extended Mode.
//0:12-bit Temperature(-55C to +128C) 1:13-bit Temperature(-55C to +150C)
sensor0.setExtendedMode(0);
// Set T_HIGH, the upper limit to trigger the alert on
// Set T_HIGH in C
sensor0.setHighTempC(29.4);
// Set T_LOW, the lower limit to shut turn off the alert
// set T_LOW in C
sensor0.setLowTempC(27.67);
}
// is TMP102
void isTMP102(){
// Turn sensor on to start temperature measurement.
// Current consumtion typically ~10uA.
sensor0.wakeup();
// read temperature data C
temperature = sensor0.readTempC();
// Check for Alert
// Read the Alert from pin
alertPinState = digitalRead(ALERT_PIN);
// Read the Alert from register
alertRegisterState = sensor0.alert();
// Place sensor in sleep mode to save power.
// Current consumtion typically <0.5uA.
sensor0.sleep();
// Keyboard
sKeyboard = sKeyboard + String(temperature) + "|" +
String(alertPinState) + "|" + String(alertRegisterState) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
setupRTC();
// Initialize control over the keyboard:
Keyboard.begin();
// Pololu Setup IMU
setupIMU();
// Pololu Setup Magnetometer
setupMag();
// Setup TMP102
isSetupTMP102();
// SetupTSOP85
isSetupIR();
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc