GPS
Project #15: Environment – GPS – Mk27
——
#DonLucElectronics #DonLuc #Arduino #RTC #EEPROM #DHT11 #ASM #Display #Elecrow #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Crowtail – GPS
This Crowtail – GPS module is a cost-efficient and field-programmable gadget armed with a NEO-6M-0-001 and serial communication configuration. It features 55 channels, and a GPS L1 C/A code receiver. The sensitivity of tracking and acquisition both reach up to -161dBm, making it a great choice for personal navigation projects and location services, as well as an outstanding one among products of the same price class.
- -Input Voltage: 5 Volt
- -Supports NMEA and U-Blox Binary
- -Low power consumption
- -Baud rates configurable
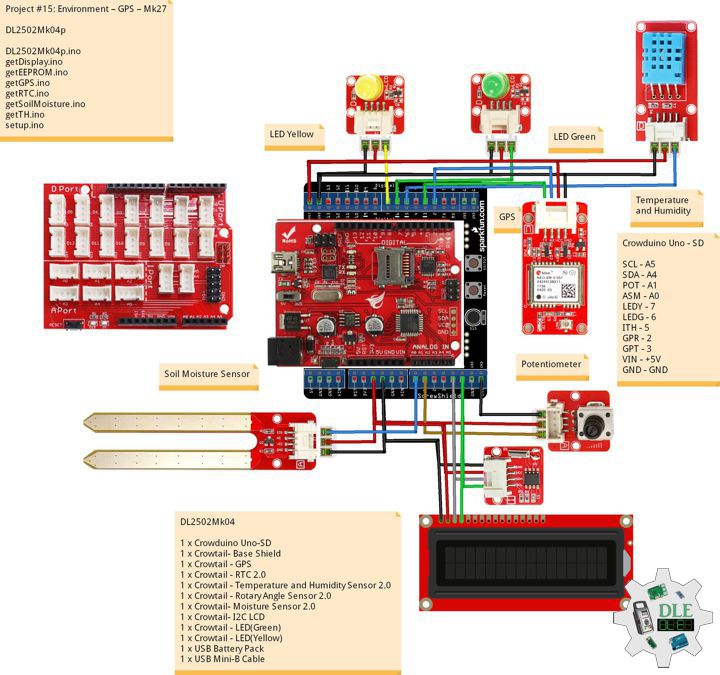
DL2502Mk04
1 x Crowduino Uno – SD
1 x Crowtail – Base Shield
1 x Crowtail – GPS
1 x Crowtail – RTC 2.0
1 x Crowtail – Temperature and Humidity Sensor 2.0
1 x Crowtail – Rotary Angle Sensor 2.0
1 x Crowtail – Moisture Sensor 2.0
1 x Crowtail – I2C LCD
1 x Crowtail – LED(Green)
1 x Crowtail – LED(Yellow)
1 x USB Battery Pack
1 x USB Mini-B Cable
Crowduino Uno – SD
SCL – A5
SDA – A4
POT – A1
ASM – A0
LEDY – 7
LEDG – 6
ITH – 5
GPR – 2
GPT – 3
VIN – +5V
GND – GND
DL2502Mk04p
DL2502Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #15: Environment – GPS – Mk27
DL2502Mk04p.ino
DL2502Mk04
1 x Crowduino Uno - SD
1 x Crowtail - Base Shield
1 x Crowtail - GPS
1 x Crowtail - RTC 2.0
1 x Crowtail - Temperature and Humidity Sensor 2.0
1 x Crowtail - Rotary Angle Sensor 2.0
1 x Crowtail - Moisture Sensor 2.0
1 x Crowtail - I2C LCD
1 x Crowtail - LED(Green)
1 x Crowtail - LED(Yellow)
1 x USB Battery Pack
1 x USB Mini-B Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Wire
#include <Wire.h>
// Liquid Crystal
#include "LiquidCrystal.h"
// Temperature and Humidity Sensor
#include "DHT.h"
// RTC (Real-Time Clock)
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// Software Serial
#include <SoftwareSerial.h>
// GPS Receiver
static const int RXPin = 2;
// This one is unused and doesnt have a conection
static const int TXPin = 3;
// GPS Baud
static const uint32_t GPSBaud = 9600;
// The TinyGPS++ object
TinyGPSPlus gps;
// The serial connection to the GPS device
SoftwareSerial ss(RXPin, TXPin);
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Status
String GPSSt = "";
// RTC (Real-Time Clock)
RTC_DS1307 RTC;
String dateRTC = "";
String timeRTC = "";
// Temperature and Humidity Sensor
#define DHTPIN 5
// DHT 11
#define DHTTYPE DHT11
DHT dht(DHTPIN, DHTTYPE);
// Temperature and Humidity Sensor
float h = 0;
float t = 0;
// Potentiometer
int iPotentiometer = A1;
// Change Your Threshold Here
int Threshold = 0;
int zz = 0;
// Liquid Crystal
// Connect via i2c
LiquidCrystal lcd(0);
// Crowtail Moisture Sensor
int iSoilMoisture = A0;
int iSoilMoistureVal = 0;
// LED Yellow
int iLEDYellow = 7;
// LED Green
int iLEDGreen = 6;
// EEPROM Unique ID Information
String uid = "";
// Software Version Information
String sver = "15-27";
void loop() {
// Crowtail Moisture Sensor
isSoilMoisture();
// Temperature and Humidity Sensor
isTH();
// RTC (Real-Time Clock)
isRTC();
// isGPS
isGPS();
// Delay 2 Second
delay( 2000 );
// Display Temperature and Humidity
isDisplayTH();
// Delay 2 Second
delay( 2000 );
// Display EEPROM
isDisplayEEPROM();
// Delay 2 Second
delay( 2000 );
// Display RTC
isDisplayRTC();
// Delay 2 Second
delay( 2000 );
// GPS Vector Pointer Target
isDisplayInfo();
// Delay 2 Second
delay( 2000 );
}
getDisplay.ino
// getDisplay
// Crowbits - OLED 128X64 UID
void isDisplayUID(){
// Set up the LCD's number of rows and columns:
lcd.begin(16, 2);
// Print a message to the LCD.
// Cursor
lcd.setCursor(0, 0);
lcd.print("Don Luc Electron");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print( sver );
}
// isDisplay Green
void isDisplayG(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Humid Soil");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( iSoilMoistureVal );
}
// isDisplay Yellow
void isDisplayY(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Dry Soil");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( iSoilMoistureVal );
}
// Display Temperature and Humidity
void isDisplayTH(){
// Clear
lcd.clear();
// Set the cursor to column 0, line 0
lcd.setCursor(0, 0);
lcd.print("H: ");
lcd.print(h);
lcd.print(" %");
// Set the cursor to column 0, line 1
lcd.setCursor(0, 1);
lcd.print("T: ");
lcd.print(t);
lcd.print(" *C");
}
// Display EEPROM
void isDisplayEEPROM(){
// Clear
lcd.clear();
// Set the cursor to column 0, line 0
lcd.setCursor(0, 0);
lcd.print("EEPROM");
// Set the cursor to column 0, line 1
lcd.setCursor(0, 1);
lcd.print( uid );
}
// Display RTC
void isDisplayRTC(){
// Clear
lcd.clear();
// Set the cursor to column 0, line 0
lcd.setCursor(0, 0);
lcd.print( dateRTC );
// Set the cursor to column 0, line 1
lcd.setCursor(0, 1);
lcd.print( timeRTC );
}
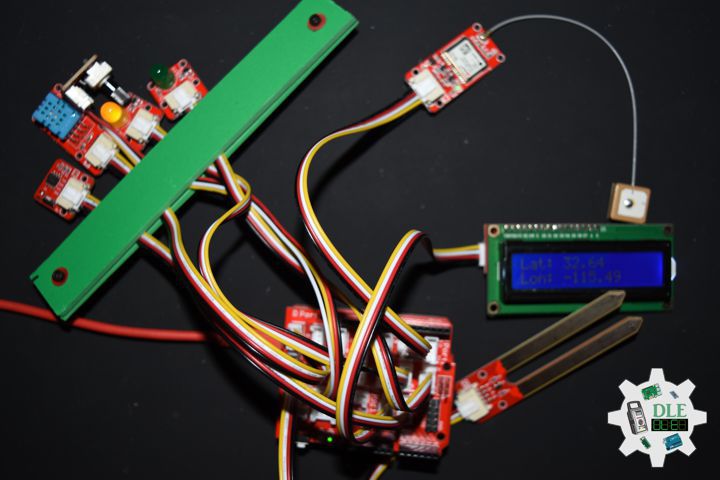
// GPS Vector Pointer Target
void isDisplayInfo(){
// Clear
lcd.clear();
// Set the cursor to column 0, line 0
lcd.setCursor(0, 0);
lcd.print( "Lat: " );
lcd.print( TargetLat );
// Set the cursor to column 0, line 1
lcd.setCursor(0, 1);
lcd.print( "Lon: " );
lcd.print( TargetLon );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a
//new sentence is correctly encoded
while ( ss.available() > 0) {
// Read
if ( gps.encode( ss.read() ))
{
// GPS Vector Pointer Target
displayInfo();
}
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
getRTC.ino
// RTC (Real-Time Clock)
// Setup RTC
void isSetupRTC(){
// RTC (Real-Time Clock)
RTC.begin();
// RTC Running
if (! RTC.isrunning()) {
// following line sets the RTC to the date & time
//this sketch was compiled
RTC.adjust(DateTime(__DATE__, __TIME__));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// RTC.adjust(DateTime(2014, 1, 21, 3, 0, 0))
}
}
// RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
DateTime now = RTC.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getSoilMoisture.ino
// Crowtail Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// Connect Soil Moisture Sensor to Analog 0
// iSoilMoistureVal => 0~700 Soil Moisture
iSoilMoistureVal = analogRead( iSoilMoisture );
// Threshold => 200~500
zz = analogRead( iPotentiometer );
Threshold = map( zz, 0, 1024, 200, 500);
// Threshold
if (iSoilMoistureVal > Threshold) {
// 300~700 - Humid Soil
// LED Yellow
digitalWrite(iLEDYellow, LOW);
// Display Green
isDisplayG();
// LED Green
digitalWrite(iLEDGreen, HIGH);
}
else {
// 0-300 Dry Soil
// LED Green
digitalWrite(iLEDGreen, LOW);
// Display Yellow
isDisplayY();
digitalWrite(iLEDYellow, HIGH);
}
}
getTH.ino
// Temperature and Humidity Sensor
void isTH(){
// Temperature
t = dht.readTemperature();
// Humidity
h = dht.readHumidity();
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// isUID EEPROM Unique ID
isUID();
// Delay
delay(100);
// Initialize the LED iLED Yellow
pinMode(iLEDYellow, OUTPUT);
// Initialize the LED LED Green
pinMode(iLEDGreen, OUTPUT);
// Temperature and Humidity Sensor
dht.begin();
// Delay
delay(100);
// Setup RTC
isSetupRTC();
// Delay
delay(100);
// GPS Receiver
// Setup GPS
ss.begin(GPSBaud);
// Delay
delay(100);
// Display UID
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc