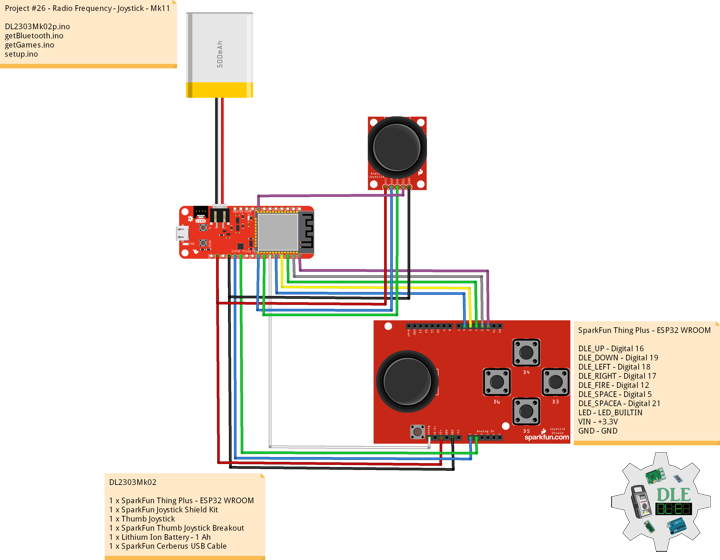
Project #26 – Radio Frequency – Joystick – Mk11
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Joystick #SparkFunJoystickShield #SparkFunThingPlusESP32WROOM #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Thumb Joystick
This is a joystick very similar to the “Analog” joysticks on PS2 controllers. Directional movements are simply two potentiometers, one for each axis. Pots are ~10k each. This joystick also has a select button that is actuated when the joystick is pressed down. This is the breakout board for the thumb joystick SparkFun Thumb Joystick Breakout.
DL2303Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
DLE_UP – Digital 16
DLE_DOWN – Digital 19
DLE_LEFT – Digital 18
DLE_RIGHT – Digital 17
DLE_FIRE – Digital 12
DLE_SPACE – Digital 5
DLE_SPACEA – Digital 21
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2303Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Joystick - Mk11
26-11
DL2303Mk02p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// ESP32 BLE Keyboard - NIMBLE
#define USE_NIMBLE
#include <BleKeyboard.h>
// ESP32 BLE Keyboard
BleKeyboard bleKeyboard;
// Game Controller Buttons
#define DLE_UP 16
#define DLE_DOWN 19
#define DLE_LEFT 18
#define DLE_RIGHT 17
#define DLE_FIRE 12
#define DLE_SPACE 5
#define DLE_SPACEA 21
// Button
bool keyStates[7] = {false, false, false, false, false, false, false};
int keyPins[7] = {DLE_UP, DLE_DOWN, DLE_LEFT, DLE_RIGHT, DLE_SPACEA, DLE_SPACE, DLE_FIRE};
uint8_t keyCodes[7] = {KEY_UP_ARROW, KEY_DOWN_ARROW, KEY_LEFT_ARROW, KEY_RIGHT_ARROW, ' ', ' ', KEY_LEFT_CTRL};
// Connect Notification Sent
bool connectNotificationSent = false;
// Software Version Information
String sver = "26-11";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// Counter
int counter;
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Connect Notification Sent
if (!connectNotificationSent) {
connectNotificationSent = true;
}
// Button
for(counter = 0; counter < 7; counter ++){
handleButton(counter);
}
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(DLE_UP, INPUT_PULLUP);
pinMode(DLE_DOWN, INPUT_PULLUP);
pinMode(DLE_LEFT, INPUT_PULLUP);
pinMode(DLE_RIGHT, INPUT_PULLUP);
pinMode(DLE_FIRE, INPUT_PULLUP);
pinMode(DLE_SPACE, INPUT_PULLUP);
pinMode(DLE_SPACEA, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Handle Button
void handleButton(int keyIndex){
// Handle the button press
if (!digitalRead(keyPins[keyIndex])){
// Button pressed
if (!keyStates[keyIndex]){
// Key not currently pressed
keyStates[keyIndex] = true;
bleKeyboard.press(keyCodes[keyIndex]);
}
} else {
// Button not pressed
if (keyStates[keyIndex]){
// Key currently pressed
keyStates[keyIndex] = false;
bleKeyboard.release(keyCodes[keyIndex]);
}
}
}
setup.ino
// Setup
void setup()
{
// Set Inputs
setInputs();
// ESP32 BLE Keyboard
bleKeyboard.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
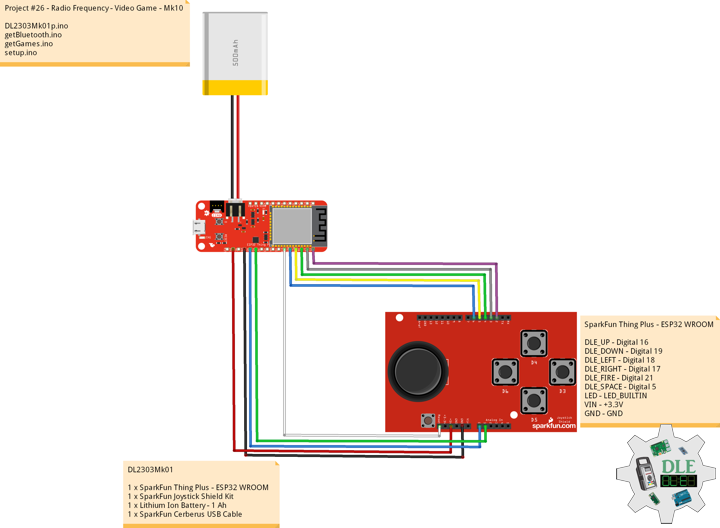
Project #26 – Radio Frequency – Video Game – Mk10
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #SparkFunJoystickShield #SparkFunThingPlusESP32WROOM #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
LaunchBox
LaunchBox was originally built as an attractive frontend for DOSBox, but has long since expanded to support both modern PC games and emulated console platforms. LaunchBox aims to be the one-stop shop for gaming on your computer, for both modern and historical games.
LaunchBox includes automated import processes for everything from modern Steam games to GOG classics, ROM files, MS-DOS games, and so much more. Box art and metadata is automatically downloaded from the LaunchBox Games Database, with excellent coverage for your games.
Doom (Video Game MS-DOS)
Doom is a video game series and media franchise created by John Carmack, John Romero, Adrian Carmack, Kevin Cloud, and Tom Hall. The focuses on the exploits of an unnamed space marine operating under the auspices of the Union Aerospace Corporation, who fights hordes of demons and the undead in order to save Earth from an apocalyptic invasion.
The original Doom is considered one of the first pioneering first-person shooter games, introducing to IBM-compatible computers features such as 3D graphics, third-dimension spatiality, networked multiplayer gameplay, and support for player-created modifications with the Doom WAD format.
DL2303Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
DLE_UP – Digital 16
DLE_DOWN – Digital 19
DLE_LEFT – Digital 18
DLE_RIGHT – Digital 17
DLE_FIRE – Digital 21
DLE_SPACE – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2303Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Video Game - Mk10
26-10
DL2301Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// ESP32 BLE Keyboard - NIMBLE
#define USE_NIMBLE
#include <BleKeyboard.h>
// ESP32 BLE Keyboard
BleKeyboard bleKeyboard;
// Game Controller Buttons
#define DLE_UP 16
#define DLE_DOWN 19
#define DLE_LEFT 18
#define DLE_RIGHT 17
#define DLE_FIRE 21
#define DLE_SPACE 5
// Button
bool keyStates[6] = {false, false, false, false, false, false};
int keyPins[6] = {DLE_UP, DLE_DOWN, DLE_LEFT, DLE_RIGHT, DLE_FIRE, DLE_SPACE};
uint8_t keyCodes[6] = {KEY_UP_ARROW, KEY_DOWN_ARROW, KEY_LEFT_ARROW, KEY_RIGHT_ARROW, KEY_LEFT_CTRL, ' '};
// Connect Notification Sent
bool connectNotificationSent = false;
// Software Version Information
String sver = "26-10";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// Counter
int counter;
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Connect Notification Sent
if (!connectNotificationSent) {
connectNotificationSent = true;
}
// Button
for(counter = 0; counter < 6; counter ++){
handleButton(counter);
}
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(DLE_UP, INPUT_PULLUP);
pinMode(DLE_DOWN, INPUT_PULLUP);
pinMode(DLE_LEFT, INPUT_PULLUP);
pinMode(DLE_RIGHT, INPUT_PULLUP);
pinMode(DLE_FIRE, INPUT_PULLUP);
pinMode(DLE_SPACE, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Handle Button
void handleButton(int keyIndex){
// Handle the button press
if (!digitalRead(keyPins[keyIndex])){
// Button pressed
if (!keyStates[keyIndex]){
// Key not currently pressed
keyStates[keyIndex] = true;
bleKeyboard.press(keyCodes[keyIndex]);
}
}
else {
// Button not pressed
if (keyStates[keyIndex]){
// Key currently pressed
keyStates[keyIndex] = false;
bleKeyboard.release(keyCodes[keyIndex]);
}
}
}
setup.ino
// Setup
void setup()
{
// Set Inputs
setInputs();
// ESP32 BLE Keyboard
bleKeyboard.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – SparkFun Joystick Shield – Mk09
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #SparkFunJoystickShield #SparkFunThingPlusESP32WROOM #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
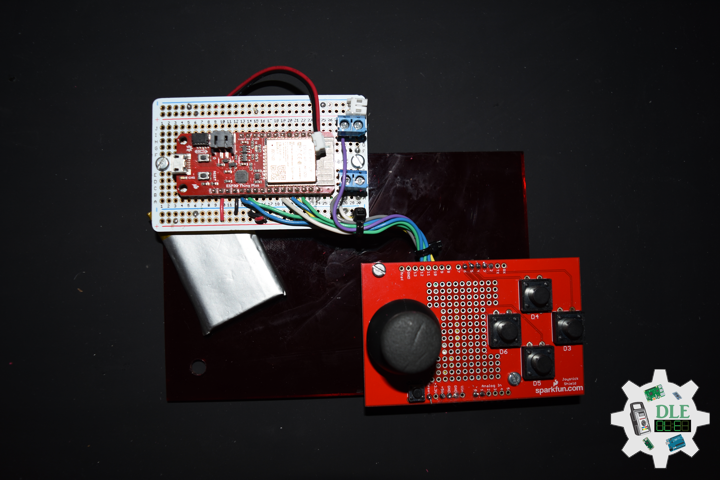
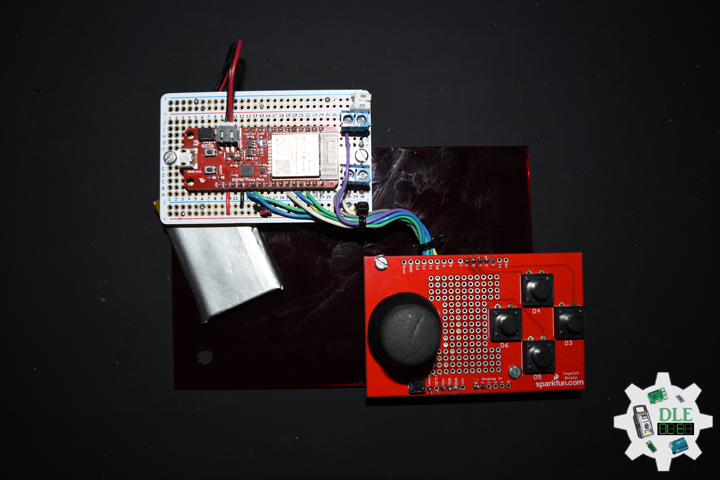
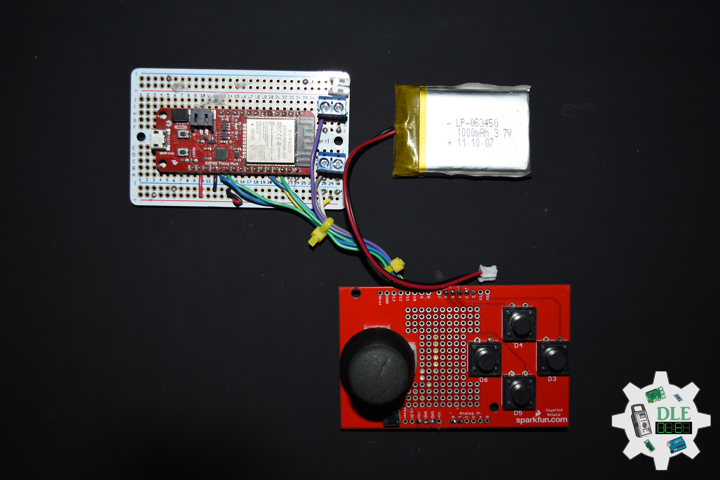
SparkFun Joystick Shield Kit
The SparkFun Joystick Shield Kit contains all the parts you need to enable your Arduino with a joystick. The shield sits on top of your Arduino and turns it into a simple controller. Five momentary push buttons and a two-axis thumb joystick gives your Arduino functionality on the level of old Nintendo controllers. Soldering is required, but it’s relatively easy and requires minimal tools. We even have a step by step guide.
The momentary push buttons are connected to Arduino digital pins 2-6; when pressed they will pull the pin low. Vertical movement of the joystick will produce a proportional analog voltage on analog pin 0, likewise, horizontal movement of the joystick can be tracked on analog pin 1.
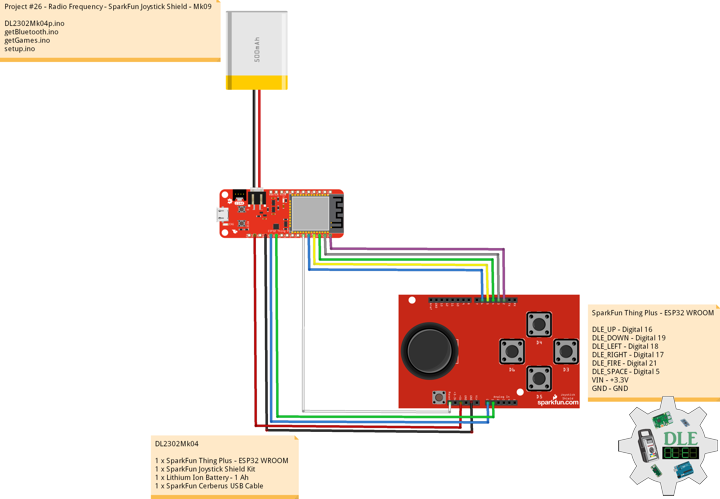
DL2302Mk04
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
DLE_UP – Digital 16
DLE_DOWN – Digital 19
DLE_LEFT – Digital 18
DLE_RIGHT – Digital 17
DLE_FIRE – Digital 21
DLE_SPACE – Digital 5
VIN – +3.3V
GND – GND
——
DL2302Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - SparkFun Joystick Shield - Mk09
26-09
DL2301Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// ESP32 BLE Keyboard - NIMBLE
#define USE_NIMBLE
#include <BleKeyboard.h>
// ESP32 BLE Keyboard
BleKeyboard bleKeyboard;
// Game Controller Buttons
#define DLE_UP 16
#define DLE_DOWN 19
#define DLE_LEFT 18
#define DLE_RIGHT 17
#define DLE_FIRE 21
#define DLE_SPACE 5
// Button
bool keyStates[6] = {false, false, false, false, false, false};
int keyPins[6] = {DLE_UP, DLE_DOWN, DLE_LEFT, DLE_RIGHT, DLE_FIRE, DLE_SPACE};
uint8_t keyCodes[6] = {'w', 'x', 'a', 'd', 'y', ' '};
// Connect Notification Sent
bool connectNotificationSent = false;
// Software Version Information
String sver = "26-09";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// Counter
int counter;
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Connect Notification Sent
if (!connectNotificationSent) {
connectNotificationSent = true;
}
// Button
for(counter = 0; counter < 6; counter ++){
handleButton(counter);
}
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(DLE_UP, INPUT_PULLUP);
pinMode(DLE_DOWN, INPUT_PULLUP);
pinMode(DLE_LEFT, INPUT_PULLUP);
pinMode(DLE_RIGHT, INPUT_PULLUP);
pinMode(DLE_FIRE, INPUT_PULLUP);
pinMode(DLE_SPACE, INPUT_PULLUP);
}
// Handle Button
void handleButton(int keyIndex){
// Handle the button press
if (!digitalRead(keyPins[keyIndex])){
// Button pressed
if (!keyStates[keyIndex]){
// Key not currently pressed
keyStates[keyIndex] = true;
bleKeyboard.press(keyCodes[keyIndex]);
}
}
else {
// Button not pressed
if (keyStates[keyIndex]){
// Key currently pressed
keyStates[keyIndex] = false;
bleKeyboard.release(keyCodes[keyIndex]);
}
}
}
setup.ino
// Setup
void setup()
{
// Set Inputs
setInputs();
// ESP32 BLE Keyboard
bleKeyboard.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
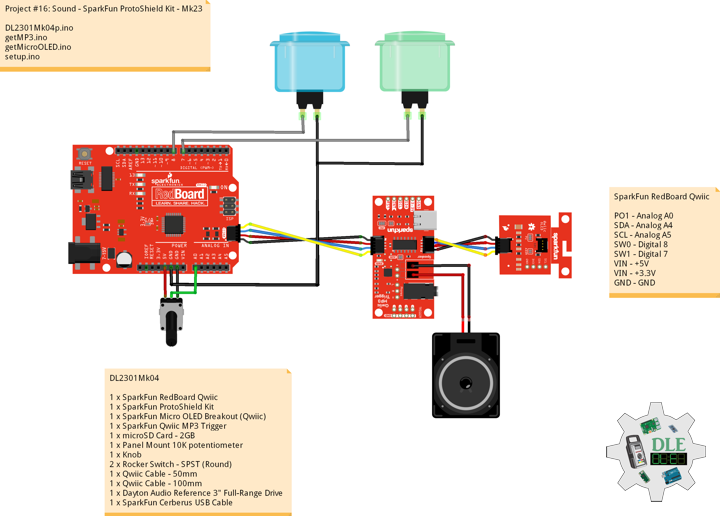
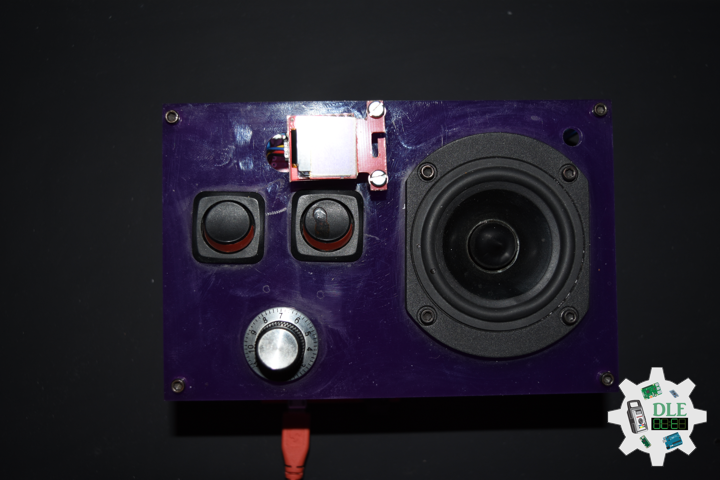
Project #16: Sound – SparkFun ProtoShield Kit – Mk23
——
#DonLucElectronics #DonLuc #Sound #Arduino #MicroOLED #ProtoShield #SparkFunQwiicMP3 #SparkFunRedBoardQwiic #Project #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
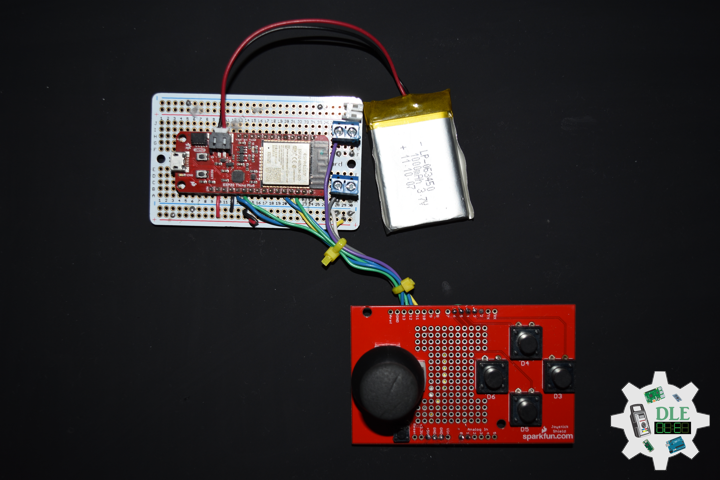
SparkFun ProtoShield Kit
The SparkFun ProtoShield Kit lets you customize your own Arduino shield using whatever circuit you can come up with and then test it to make sure everything is working the way it should. The SparkFun ProtoShield Kit is based off the Arduino R3’s footprint that allows you to easily incorporate it with favorite Arduino-based device.
One of our favorite features with this version of the ProtoShield Kit is the solderable-like breadboard prototyping area. Half of this area was designed with a breadboard in mind. On the underside of the shield you will be able to see open jumper pads between each through hole to make a connection like a breadboard. Once you add a component, simply add a solder jumper between holes to make a connection. For those that prefer the standard prototyping pads.
DL2301Mk04
1 x SparkFun RedBoard Qwiic
1 x SparkFun ProtoShield Kit
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun Qwiic MP3 Trigger
1 x microSD Card – 2GB
1 x Panel Mount 10K potentiometer
1 x Knob
2 x Rocker Switch – SPST (Round)
1 x Qwiic Cable – 50mm
1 x Qwiic Cable – 100mm
1 x Dayton Audio Reference 3″ Full-Range Drive
1 x SparkFun Cerberus USB Cable
——
SparkFun RedBoard Qwiic
PO1 – Analog A0
SDA – Analog A4
SCL – Analog A5
SW0 – Digital 8
SW1 – Digital 7
VIN – +5V
VIN – +3.3V
GND – GND
——
DL2301Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
#16 - Sound - SparkFun ProtoShield Kit - Mk23
16-04
DL2301Mk04p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun ProtoShield Kit
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun Qwiic MP3 Trigger
1 x microSD Card - 2GB
1 x Panel Mount 10K potentiometer
1 x Knob
2 x Rocker Switch - SPST (Round)
1 x Qwiic Cable - 50mm
1 x Qwiic Cable - 100mm
1 x Dayton Audio Reference 3" Full-Range Drive
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire communicate with I2C / TWI devices
#include <Wire.h>
// SparkFun MP3 Trigger
#include "SparkFun_Qwiic_MP3_Trigger_Arduino_Library.h"
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// SparkFun MP3 Trigger
MP3TRIGGER mp3;
int iSongCount = 0;
int x = 0;
// Volume
int iVolume = A0;
int iVolumeLevel = 0;
// EQ Setting Normal
byte bEQSetting = 0;
// Play Next
const int iPlayNext = 8;
// Variable for reading the iPlayNext status
int iPlayNextState = 0;
// Play Previous
const int iPlayPrevious = 7;
// Variable for reading the iPlayPrevious status
int iPlayPreviousState = 0;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// iLED ProtoShield
int iLED = 13;
// Software Version Information
String sver = "16-23";
void loop()
{
// SparkFun MP3 Trigger
if (mp3.isPlaying() == false) {
if ( x > iSongCount ) {
x = 0;
} else {
x = x + 1;
}
// Play Track
mp3.playTrack( x );
} else {
// Volume
isVolume();
// Play Next
isPlayNext();
// Play Previous
isPlayPrevious();
}
// Micro OLED
isMicroOLED();
}
getMP3.ino
// MP3
// Setup MP3
void isSetupMP3(){
// Check to see if Qwiic MP3 is present on the bus
if (mp3.begin() == false)
{
// Qwiic MP3 failed to respond. Please check wiring and possibly the I2C address. Freezing...
while (1);
}
if (mp3.hasCard() == false)
{
// Qwiic MP3 is missing its SD card. Freezing...
while (1);
}
// Song Count
iSongCount = mp3.getSongCount();
// EQ Setting
// 0 Normal
// 1 Pop
// 2 Rock
// 3 Jazz
// 4 Classic
// 5 Bass
bEQSetting = 5;
bEQSetting = mp3.getEQ();
// Initialize the iPlayNext
pinMode( iPlayNext, INPUT);
// Initialize the iPlayPrevious
pinMode( iPlayPrevious, INPUT);
}
// Volume
void isVolume() {
// Volume
iVolumeLevel = analogRead( iVolume );
// (0-1023 for 10 bits or 0-4095 for 12 bits)
iVolumeLevel = map(iVolumeLevel, 0, 1023, 0, 10);
// Volume can be 0 (off) to 31 (max)
// Volume can be 0 (off) to 10 (Breakfast)
mp3.setVolume( iVolumeLevel );
}
// Play Next
void isPlayNext() {
// Read the state of the iPlayNext value
iPlayNextState = digitalRead( iPlayNext );
if ( iPlayNextState == HIGH ) {
mp3.stop();
if ( x > iSongCount ) {
x = 0;
} else {
x = x + 1;
}
// Play Track
mp3.playTrack( x );
}
}
// Play Previous
void isPlayPrevious() {
// Read the state of the iPlayPrevious value
iPlayPreviousState = digitalRead( iPlayPrevious );
if ( iPlayPreviousState == HIGH ) {
mp3.stop();
if ( x > iSongCount ) {
x = 0;
} else {
x = x - 1;
}
// Play Track
mp3.playTrack( x );
}
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Song
oled.print("Song");
// Song Name
oled.setCursor(0, 13);
String songName = mp3.getSongName();
oled.print( songName );
// Song Count
oled.setCursor(0, 24);
oled.print("Song Count");
// Song Count
oled.setCursor(0, 37);
iSongCount = mp3.getSongCount();
oled.print( iSongCount );
oled.display();
}
setup.ino
// Setup
void setup()
{
// Initialize digital pin iLED ProtoShield as an output
pinMode(iLED, OUTPUT);
// Turn the LED on (HIGH is the voltage level)
digitalWrite(iLED, HIGH);
// Wire communicate with I2C / TWI devices
Wire.begin();
// SparkFun MP3 Trigger Setup
isSetupMP3();
// Setup Micro OLED
isSetupMicroOLED();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
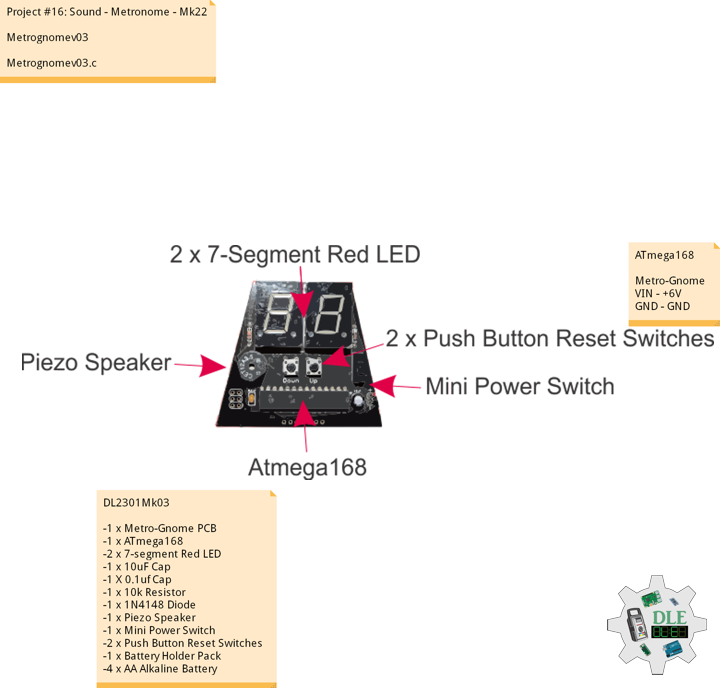
Project #16: Sound – Metronome – Mk22
——
#DonLucElectronics #DonLuc #Sound #Metronome #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——

——
Metronome
A metronome is a device that produces an audible click or other sound at a regular interval that can be set by the user, typically in Beats Per Minute (BPM). Metronomes may include synchronized visual motion. Musicians use the device to practise playing to a regular pulse. In the 20th century, electronic metronomes and software metronomes were invented.
Musicians practise with metronomes to improve their timing, especially the ability to stick to a regular tempo. Metronome practice helps internalize a clear sense of timing and tempo. Composers and conductors often use a metronome as a standard tempo reference, and may play, sing, or conduct to the metronome. The metronome is used by composers to derive beats per minute if they want to indicate that in a composition. Conductors use a metronome to note their preferred tempo in each section.
SparkFun Metro-Gnome
The SparkFun Metro-Gnome is a basic digital metronome used to keep time during music practice. This is a basic kit that goes together in 15-20 minutes for people learning to solder, and 5-10 minutes for those with a bit of experience.
DL2301Mk03
-1 x Metro-Gnome PCB
-1 x ATmega168
-2 x 7-Segment Red LED
-1 x 10uF Capacitor
-1 X 0.1uf Capacitor
-1 x 10k Resistor
-1 x 1N4148 Diode
-1 x Piezo Speaker
-1 x Mini Power Switch
-2 x Push Button Reset Switches
-1 x Battery Holder Pack
-4 x AA Alkaline Battery
ATmega168
Metro-Gnome
VIN – +6V
GND – GND
——
Metrognomev03
Metrognomev03.c
// Metronome-v03
#define F_CPU 1024000 // Adjust this to get the clock more precise
#include <avr/io.h>
#include <util/delay.h>
#include <avr/interrupt.h>
#define BUZZER1 1
#define BUZZER1_PORT PORTB
#define BUZZER2 2
#define BUZZER2_PORT PORTB
#define sbi(port_name, pin_number) (port_name |= 1<<pin_number)
#define cbi(port_name, pin_number) ((port_name) &= (uint8_t)~(1 << pin_number))
uint16_t countUp = F_CPU/1024; // Dividing clock by 1024
uint16_t speed = 60; // Program initially runs at 60 BPM
uint8_t leftDisplay = 6; // Initialize output to show 60 BPM
uint8_t rightDisplay = 0;
void ioinit();
void display(int digit, int number);
// Interrupt Timer 1 makes the buzzer tick at proper intervals
ISR(TIMER1_COMPA_vect)
{
int buzzPeriod = 100;
uint32_t buzzLength = 1000;
while(1)
{
//Subtract the buzzPeriod from the overall length
if(buzzPeriod > buzzLength) break;
buzzLength -= buzzPeriod;
if(buzzPeriod > buzzLength) break;
buzzLength -= buzzPeriod;
//Toggle the buzzer at various speeds
PINB = 0b00000010;
_delay_us(buzzPeriod);
PINB = 0b00000100;
_delay_us(buzzPeriod);
}
}
// Interrupt Timer 2 checks for button presses
ISR(TIMER0_COMPA_vect)
{
// Check down button
if( (PINB & (1<<4)) == 0)
{
if (speed == 1) // If speed = 1 go up to 299
{
speed = 299;
rightDisplay = 9;
leftDisplay = 9;
}
else if ((rightDisplay == 0) && (leftDisplay == 0))
{
rightDisplay = 9;
leftDisplay = 9;
speed--;
}
else if (rightDisplay == 0)
{
rightDisplay = 9;
leftDisplay--;
speed--;
}
else
{
rightDisplay--;
speed--;
}
// Reset counter and adjust compare register
TCNT1 = 0x00;
OCR1A = (countUp*60)/speed;
}
// Check up button
if((PINB & (1<<5)) == 0)
{
if (speed == 299)
{
speed = 1;
rightDisplay = 1;
leftDisplay = 0;
}
else if ((rightDisplay == 9) && (leftDisplay == 9))
{
rightDisplay = 0;
leftDisplay = 0;
speed++;
}
else if (rightDisplay == 9)
{
rightDisplay = 0;
leftDisplay++;
speed++;
}
else
{
rightDisplay++;
speed++;
}
// Reset counter and adjust compare register
TCNT1 = 0x00;
OCR1A = (countUp*60)/speed;
}
}
int main()
{
int flag = 0;
ioinit();
while(1) // Main loop PWM's the two displays at 1kHz
{
if (flag == 0)
{
cbi(PORTC, 1); // Turn right display off
display(0, leftDisplay); // Output to left display
flag = 1;
}
else
{
cbi(PORTC, 0); // Turn left display off
display(1, rightDisplay); // Output to right display
flag = 0;
}
_delay_us(10);
PORTD = 0xFF;
cbi(PORTC, 0);
cbi(PORTC, 1);
_delay_us(30);
}
return 0;
}
void ioinit()
{
// set PORTB for Buzzer and buttons
DDRB = DDRB | 0b00110110;
PORTB = PORTB | 0b00110000;
// set PORTC for DIGI select
DDRC = 0b0000011;
PINC = 0b0000011;
// set PORTD for display
DDRD = 0b11111111;
// Set 16-bit Timer 1 for clicking
TCCR1A = 0x00;
TCCR1B = (_BV(WGM12) | _BV(CS12) | _BV(CS10)); // Divide clock by 1024, CTC mode
OCR1A = (countUp*60)/speed; // Set top of counter
TIMSK1 = _BV(OCIE1A); // Enable OCR1A interrupt
// Set Timer 0 to check button press
TCCR0A = _BV(WGM01);
TCCR0B = _BV(CS00) | _BV(CS02);
OCR0A = 100; // OCCR0A can be adjusted to change the button debounce time
TIMSK0 = _BV(OCIE0A);
sei(); // Enable interrupts
}
// This will output the corresponding
// 'number' to digit 0 (left) or 1 (right)
void display(int digit, int number)
{
//cbi(PORTC, digit); // Ties display to ground
if (digit == 0)
sbi(PORTC, 0); // Ties display to ground
else if (digit == 1)
sbi(PORTC, 1);
switch(number) // Set PIND, display pins, to correct output
{
case 0:
PORTD = 0b11000000;
break;
case 1:
PORTD = 0b11111001;
break;
case 2:
PORTD = 0b10100100;
break;
case 3:
PORTD = 0b10110000;
break;
case 4:
PORTD = 0b10011001;
break;
case 5:
PORTD = 0b10010010;
break;
case 6:
PORTD = 0b10000010;
break;
case 7:
PORTD = 0b11111000;
break;
case 8:
PORTD = 0b10000000;
break;
case 9:
PORTD = 0b10010000;
break;
}
// Turn decimal point on if above 100 & 200
if ((digit == 0) && (speed >= 200))
cbi(PORTD, 7);
if ((digit == 1) && (speed >= 100))
cbi(PORTD, 7);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
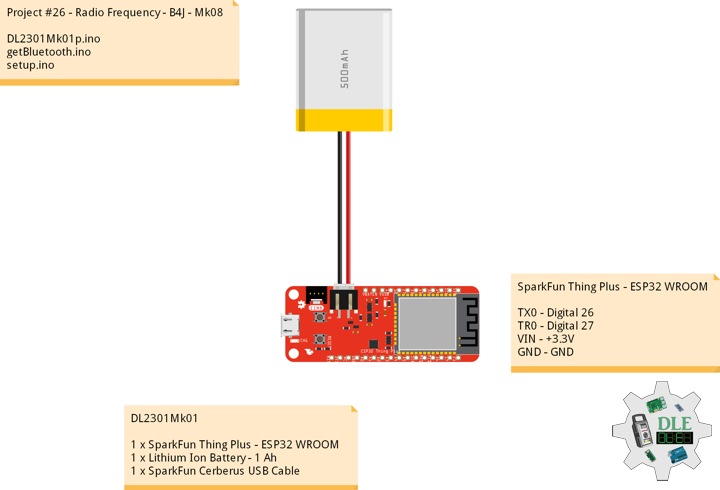
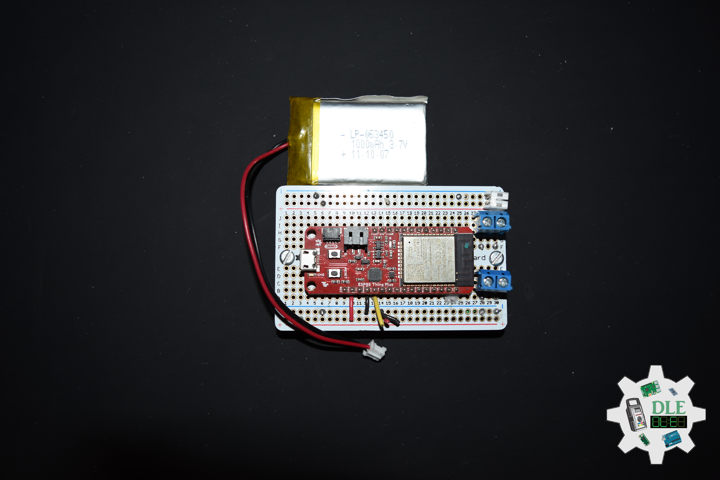
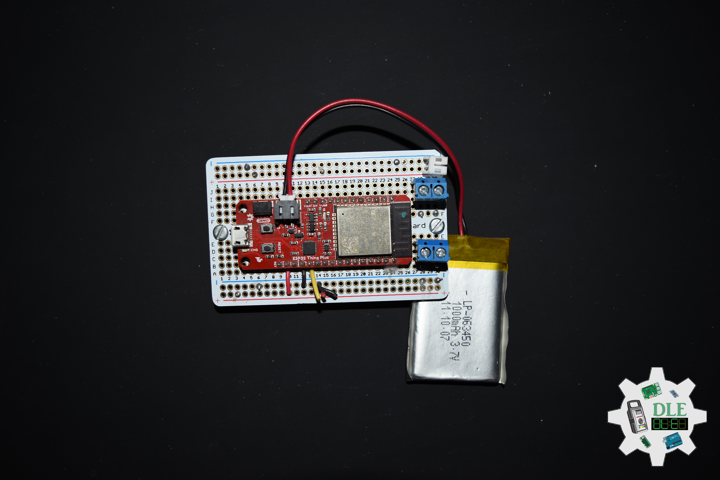
Project #26 – Radio Frequency – B4J – Mk08
——
#DonLucElectronics #DonLuc #RadioFrequency #B4J #Bluetooth #SparkFunThingPlusESP32WROOM #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
B4J
RAD development tool for cross platform desktop, server and IoT solutions. B4J is a 100% free development tool for desktop, server and IoT solutions. With B4J you can easily create desktop applications, console programs and server solutions. B4J apps can run on Windows, Mac, Linux and ARM boards such as Raspberry Pi. The compiled apps are standalone, without any external dependencies.
DL2301Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
TX0 – Digital 26
TR0 – Digital 27
VIN – +3.3V
GND – GND
DL2301Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - B4J - Mk08
26-08
DL2301Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial (ESP32SPP)
#include "BluetoothSerial.h"
// Bluetooth Serial (ESP32SPP)
BluetoothSerial SerialBT;
// Software Version Information
String sver = "26-08";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// Input
byte inputFromOtherSide;
// Bluetooth Serial (ESP32SPP)
if (SerialBT.available()) {
// Input Read
inputFromOtherSide = SerialBT.read();
// Write
SerialBT.write(inputFromOtherSide);
}
}
setup.ino
// Setup
void setup()
{
// Bluetooth Serial (ESP32SPP)
SerialBT.begin("DLE");
// Delay
delay(1000);
}
——
B4J – Bluetooth
Bluetooth.b4j
#Region Project Attributes
' Form Width and Form Height
#MainFormWidth: 600
#MainFormHeight: 400
#End Region
Sub Process_Globals
'Java OpenJDK 11
Private fx As JFX
' MainForm => Form
Private MainForm As Form
' Button
Private btnConnect As Button
Private btnSearch As Button
Private btnSend As Button
' List View
Private ListView1 As ListView
' Text Field
Private txtInput As TextField
' Text Area
Private txtLog As TextArea
' Bluetooth
Private bt As Bluetooth
' Async Streams
Private astream As AsyncStreams
' Boolean
Private connected As Boolean
Private searchingForDevices As Boolean
' Bluetooth Connection
Private currentConnection As BluetoothConnection
' Map
Private foundDevices As Map
' Button
Private btnDisconnect As Button
' Label
Private lblConnectionState As Label
Private lblSearchState As Label
' Image View
Private ImageView1 As ImageView
End Sub
Sub AppStart (Form1 As Form, Args() As String)
' App Start => MainForm = Form1
MainForm = Form1
MainForm.SetFormStyle("UNIFIED")
' Load the layout file.
MainForm.RootPane.LoadLayout("1")
' Show
MainForm.Show
' Bluetooth
bt.Initialize("bt")
foundDevices.Initialize
If bt.IsEnabled Then
bt.Listen
End If
' Update State
UpdateState
End Sub
Private Sub UpdateState
' Update State
If bt.IsEnabled = False Then
' No Bluetooth
lblSearchState.Text = "Bluetooth not available"
For Each n As Node In MainForm.RootPane
n.Enabled = False
Next
Else
' Bluetooth
' Button
btnSearch.Enabled = Not(searchingForDevices)
btnConnect.Enabled = Not(connected) And ListView1.SelectedIndex > -1
txtInput.Enabled = connected
btnSend.Enabled = connected
btnDisconnect.Enabled = connected
' State => Connected or Disconnected
Dim state As String
If connected Then
state = "Connected: " & currentConnection.Name
Else
state = "Disconnected"
End If
' Label
lblConnectionState.Text = state
lblSearchState.Text = "Searching..."
lblSearchState.Visible = searchingForDevices
End If
End Sub
Private Sub btnSearch_Action
' Button
' Search Boolean
Dim res As Boolean = bt.StartDiscovery
If res Then
' Searching For Devices
searchingForDevices = True
' List View
ListView1.Items.Clear
' Update State
UpdateState
Else
' Error
Log("Error starting discovery")
End If
End Sub
Private Sub bt_DeviceFound (Name As String, MacAddress As String)
' Button
' Device Found => Description
Dim description As String = Name & ": " & MacAddress
' List View
ListView1.Items.Add(description)
' Found Devices
foundDevices.Put(description, MacAddress)
End Sub
Private Sub bt_DiscoveryFinished
' Button
' Discovery Finished
searchingForDevices = False
' Update State
UpdateState
End Sub
Private Sub btnConnect_Action
' Button
' Connect
Dim address As String = foundDevices.Get(ListView1.SelectedItem)
' Bluetooth
bt.Connect(address)
End Sub
Private Sub bt_Connected (Success As Boolean, connection As BluetoothConnection)
' Button
Log($"Connected, success=${Success}"$)
' Success
If Success Then
' Connection
currentConnection = connection
connected = True
' AStream
If astream.IsInitialized Then astream.Close
astream.InitializePrefix(connection.InputStream, True, connection.OutputStream, "AStream")
End If
' Bluetooth Listen
bt.Listen
' Update State
UpdateState
End Sub
Sub AStream_NewData (Buffer() As Byte)
' AStream New Data
' You => Arduino
LogMessage("You", BytesToString(Buffer, 0, Buffer.Length, "UTF8"))
End Sub
Sub AStream_Error
' AStream Error
connected = False
' Update State
UpdateState
End Sub
Sub AStream_Terminated
' AStream Terminated
AStream_Error
End Sub
Private Sub txtInput_Action
' Button Send
btnSend_Action
End Sub
Private Sub btnSend_Action
' Button Send
If txtInput.Text.Length > 0 Then
' AStream
' Me => B4J
LogMessage("Me", txtInput.Text)
' AStream Write
astream.Write(txtInput.Text.GetBytes("utf8"))
txtInput.Text = ""
End If
End Sub
Private Sub LogMessage(From As String, Msg As String)
' Log Message
txtLog.Text = txtLog.Text & From & ": " & Msg & CRLF
txtLog.SetSelection(txtLog.Text.Length, txtLog.Text.Length)
End Sub
Private Sub ListView1_SelectedIndexChanged(Index As Int)
' Update State
UpdateState
End Sub
Private Sub btnDisconnect_Action
' Bluetooth Disconnect
currentConnection.Disconnect
' AStream Close
If astream.IsInitialized Then astream.Close
connected = False
' Update State
UpdateState
End Sub
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2022
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
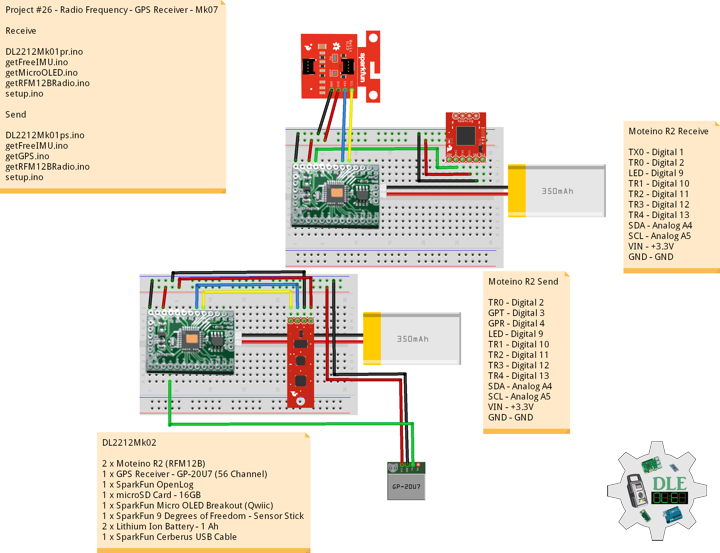
Project #26 – Radio Frequency – GPS Receiver – Mk07
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #GPSReceiver #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
GPS Receiver – GP-20U7 (56 Channel)
The GP-20U7 is a compact GPS receiver with a built-in high performances all-in-one GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
This 56-channel GPS module, that supports a standard NMEA-0183 and uBlox 7 protocol, has low power consumption of 40mA@3.3V (Max), an antenna on board, and -162dBm tracking sensitivity. With 56 channels in search mode and 22 channels “All-In-View” tracking, the GP-20U7 is quite the work horse for its size.
DL2212Mk02
2 x Moteino R2 (RFM12B)
1 x GPS Receiver – GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk02pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - GPS Receiver - Mk07
26-07
Receive
DL2212Mk02pr.ino
2 x Moteino R2 (RFM12B)
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-07";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// msg = "<IMU|Yaw|Pitch|Roll|GPS Status|Latitude|Longitude|Date|Time|*"
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt
// + "|" + TargetLat + "|" TargetLon + "|" + TargetDat +"|" + TargetTim + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
GPT – Digital 3
GPR – Digital 4
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk02ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - GPS Receiver - Mk07
26-07
Send
DL2212Mk02ps.ino
2 x Moteino R2 (RFM12B)
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// GPS Receiver
#include <TinyGPS++.h>
// Software Serial
#include <SoftwareSerial.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// GPS Receiver
#define gpsRXPIN 4
// This one is unused and doesnt have a conection
#define gpsTXPIN 3
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
String sLat = "";
// Longitude
float TargetLon;
String sLon = "";
// GPS Date, Time
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Status
String GPSSt = "";
// The serial connection to the GPS device
SoftwareSerial tGPS(gpsRXPIN, gpsTXPIN);
// Software Version Information
String sver = "26-07";
void loop()
{
// isGPS
isGPS();
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// Latitude and Longitude
sLat = "";
sLon = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// Latitude and Longitude
sLat.concat( TargetLat );
sLon.concat( TargetLon );
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|Yaw|Pitch|Roll|GPS Status|Latitude|Longitude|Date|Time|*"
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt
// + "|" + TargetLat + "|" TargetLon + "|" + TargetDat +"|" + TargetTim + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt + "|"
+ sLat + "|" + sLon + "|" + TargetDat + "|" + TargetTim + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// GPS Receiver
// Setup GPS
setupGPS();
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
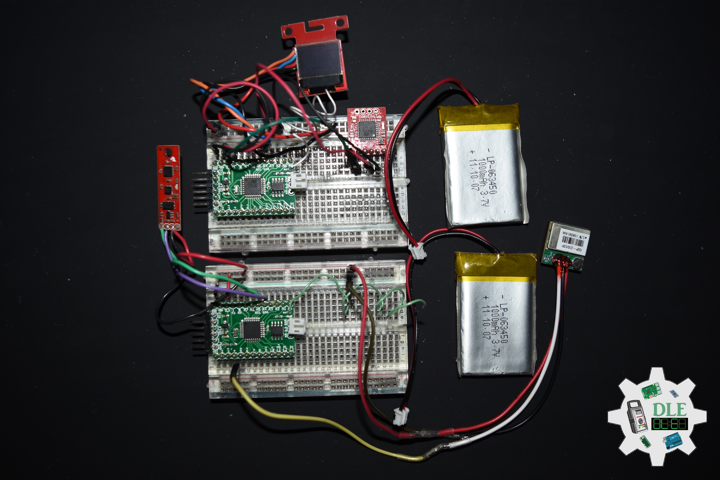
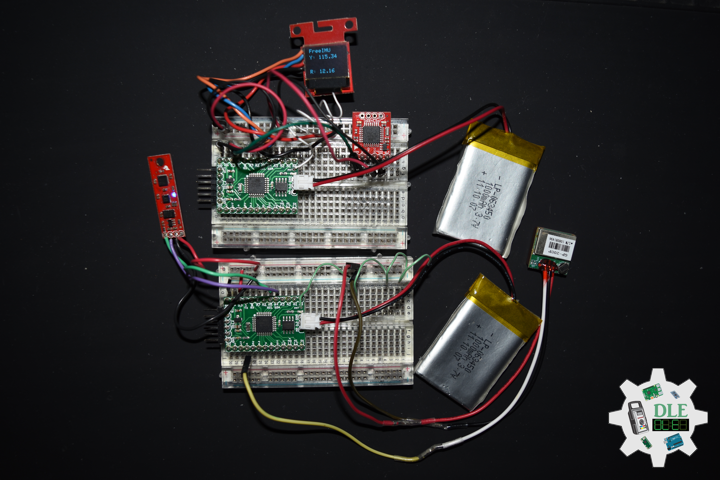
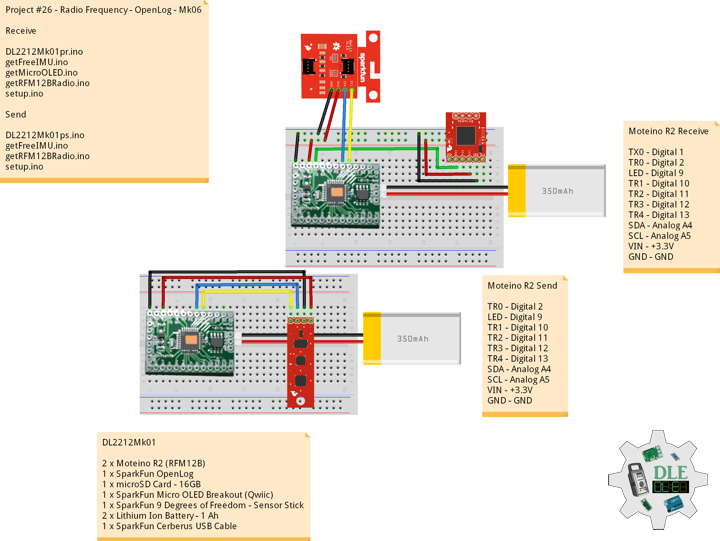
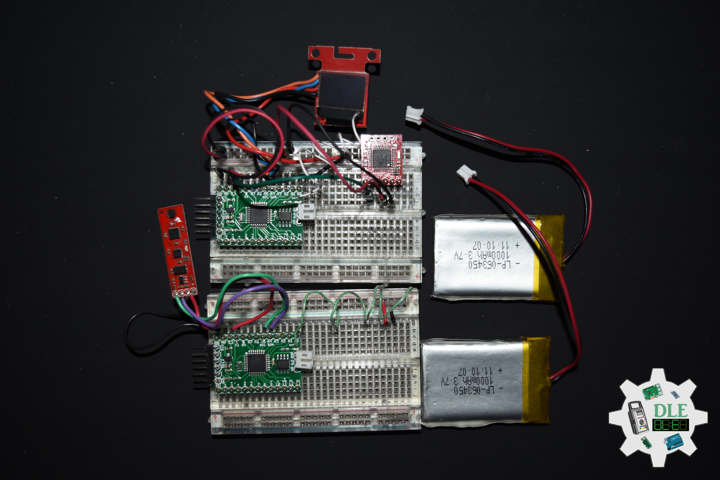
Project #26 – Radio Frequency – OpenLog – Mk06
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun OpenLog
The SparkFun OpenLog is an open source data logger that works over a simple serial connection and supports microSD cards up to 32GB. The OpenLog can store or “Log” huge amounts of serial data and act as a black box of sorts to store all the serial data that your project generates, for scientific or debugging purposes.
The SparkFun OpenLog uses an ATmega328 running at 16MHz thanks to the onboard resonator. The OpenLog draws approximately 2-3mA in idle mode. During a full record OpenLog can draw 10 to 20mA depending on the microSD card being used.
All data logged by the OpenLog is stored on the microSD card. Any 512MB to 32GB microSD card should work. OpenLog supports both FAT16 and FAT32 SD formats.
DL2212Mk01
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Receive
DL2212Mk01pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-06";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Send
DL2212Mk01ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-06";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
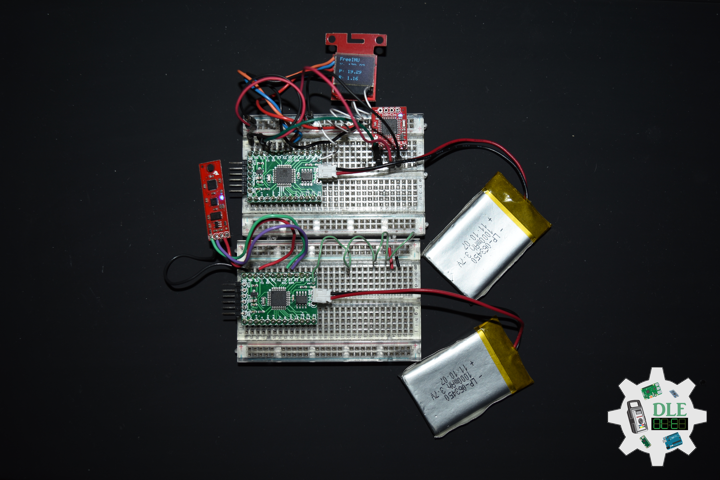
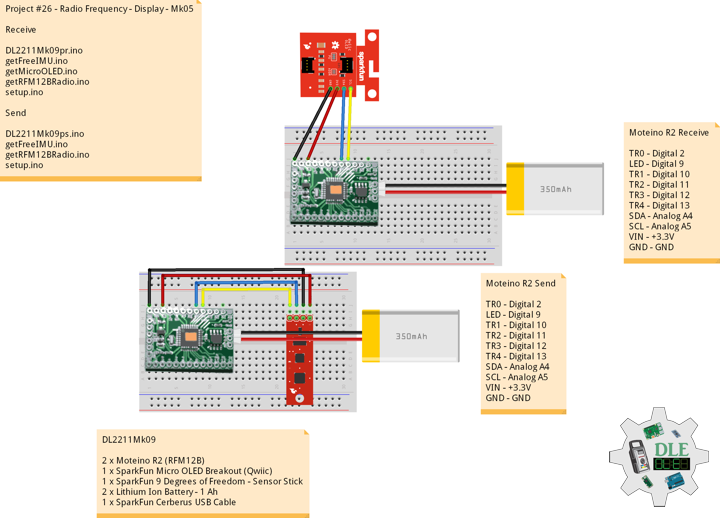
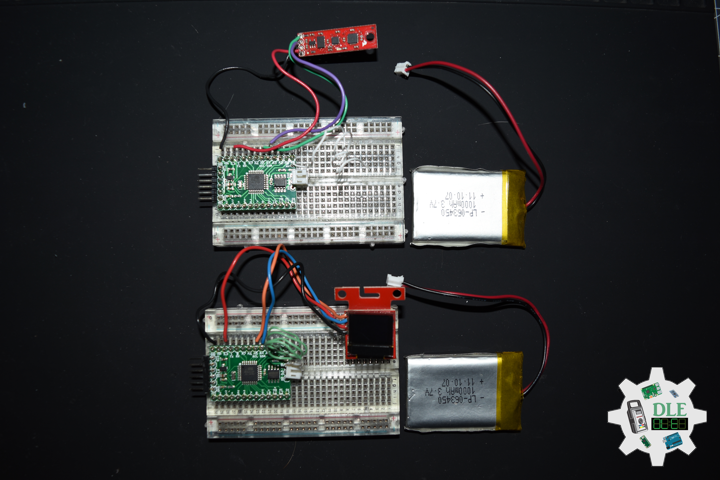
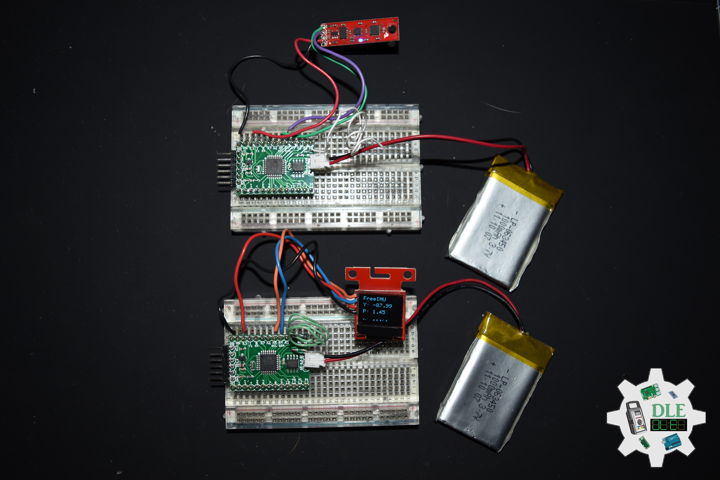
Project #26 – Radio Frequency – Display – Mk05
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun Micro OLED Breakout
The SparkFun Qwiic Micro OLED Breakout is a Qwiic-enabled version of our popular Micro OLED display. The small monochrome, blue-on-black OLED screen presents incredibly clear images for your viewing pleasure. It’s the OLED display is crisp, and you can fit a deceivingly large amount of graphics on there. This breakout is perfect for adding graphics to your next project and displaying diagnostic information without resorting to a serial output, all with the ease of use of our own Qwiic Connect System.
This version of the Micro OLED Breakout is exactly the size of its non-Qwiic sibling, featuring a screen that is 64 pixels wide and 48 pixels tall and measuring 0.66″ across. But it has also been equipped with two Qwiic connectors, making it ideal for I2C operations. We’ve also added two mounting holes and a convenient Qwiic cable holder incorporated into a detachable tab on the board that can be easily removed thanks to a v-scored edge.
DL2211Mk09
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Receive
DL2211Mk09pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-05";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Send
DL2211Mk09ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-05";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – FreeIMU – Mk04
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
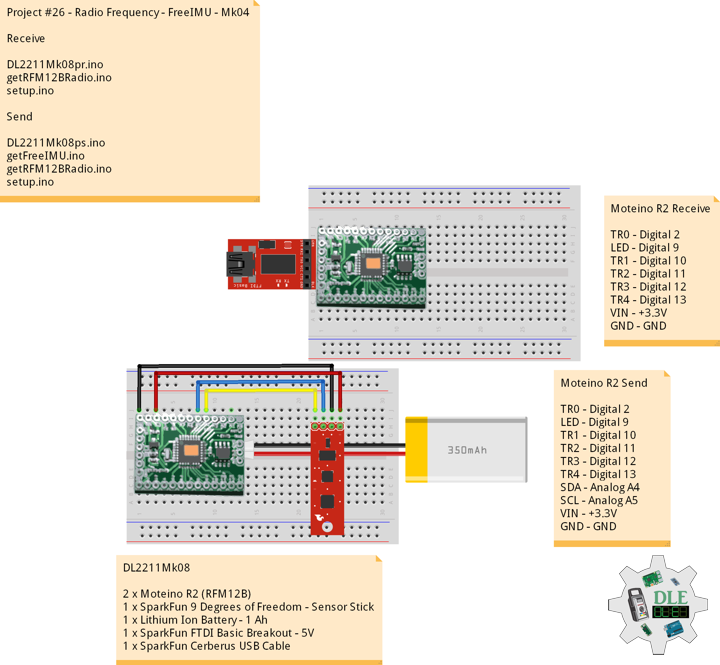
——
——
——
FreeIMU
Orientation and Motion Sensing are widely implemented on various consumer products, such as mobile phones, tablets and cameras as they enable immediate interaction with virtual information. The prototyping phase of any orientation and motion sensing capable device is however a quite difficult process as it may involve complex hardware designing, math algorithms and programming. FreeIMU, an Open Hardware Framework for prototyping orientation and motion sensing capable devices. The framework consists in a small circuit board containing various sensors and a software library, built on top of the Arduino platform. Both the hardware and library are released under open licences and supported by an active community allowing to be implemented into research and commercial projects.
DL2211Mk08
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
——
DL2211Mk08pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - FreeIMU - Mk04
26-04
Receive
DL2211Mk08pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-04";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk08ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - FreeIMU - Mk04
26-04
Send
DL2211Mk08ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-04";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc