Display
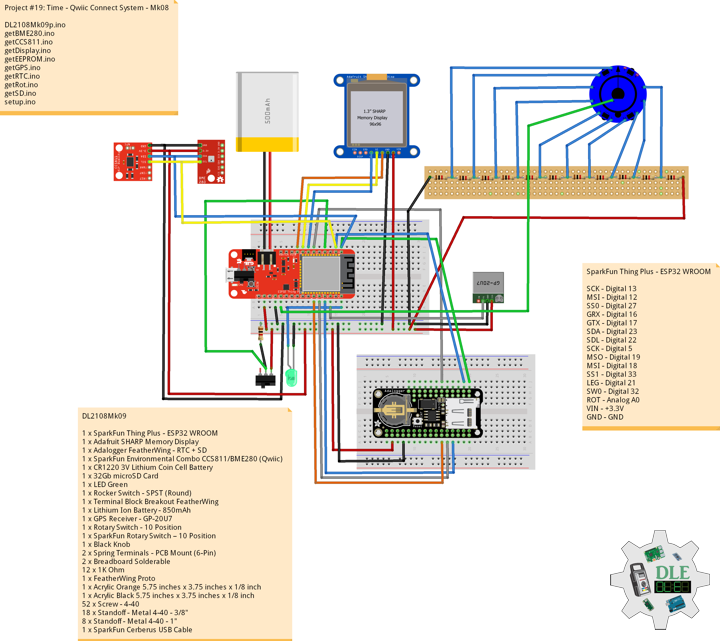
Project #19: Time – Qwiic Connect System – Mk08
—–
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog #VideoBlog
——
——

——

——
Qwiic Connect System
Prototyping with I2C has never been easier. SparkFun’s Qwiic Connect System uses 4-pin JST connectors to quickly interface development boards with sensors, LCDs, relays and more.
DL2108Mk09
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw – 4-40
18 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
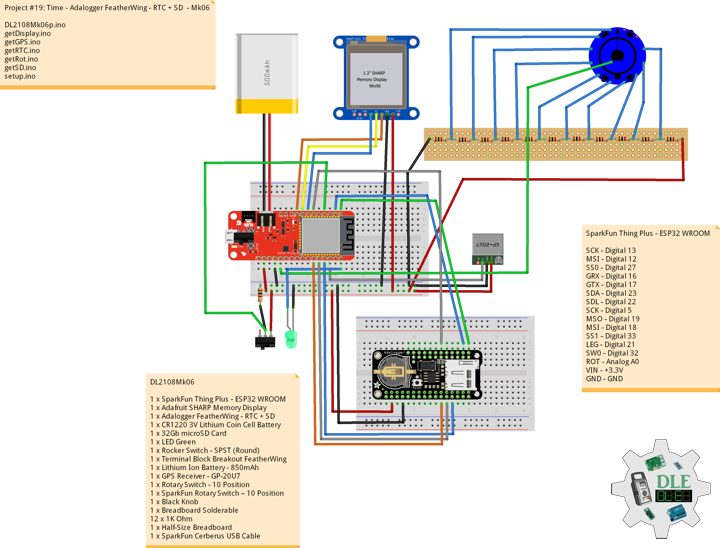
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
DL2108Mk09p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - Qwiic Connect System - Mk08
08-08
DL2108Mk09p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw - 4-40
18 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-08";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display BME280
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
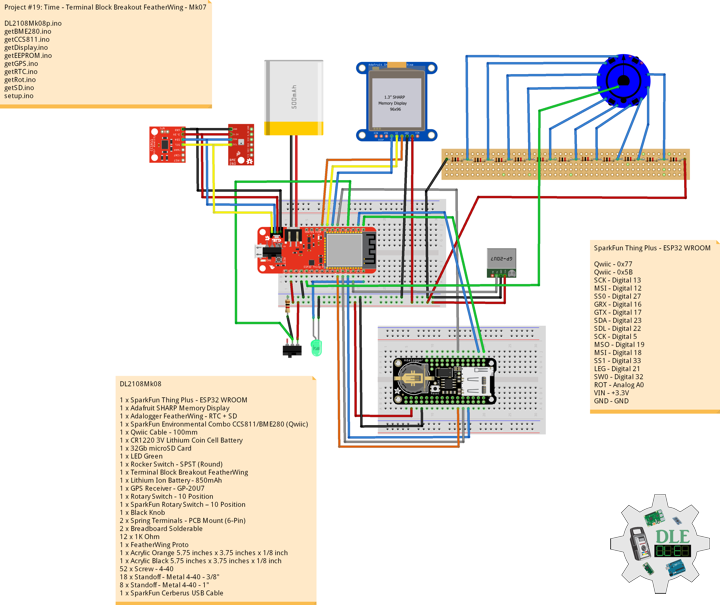
Project #19: Time – Terminal Block Breakout FeatherWing – Mk07
——
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——

——

——
Terminal Block Breakout FeatherWing
The Terminal Block Breakout FeatherWing kit is like the of prototyping FeatherWings. To start, you get a nice prototyping area underneath your Feather, with extra pads for ground, 3.3V and SDA/SCL. There’s also four mounting holes so you can attach the breakout to your enclosure or project.
This product works with all our Feathers. The terminal blocks allow you to connect to any of the external Feather pins, great for wiring temporary or permanent installations. We also give you a few extra terminal block pins for ground and 3.3V connections since those are so useful.
FeatherWing Proto
This is the FeatherWing Proto – a prototyping add-on for all Feather boards. This has a duplicate breakout for each pin on a Feather, as well as a bunch of plain grid proto holes. For GND and 3.3V, we give you a strip of connected pads. There’s plenty of room for buttons, indicator LEDs, or anything for your portable project. The FeatherWing Proto makes an ideal partner for any of our Feather boards.
DL2108Mk08
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Qwiic Cable – 100mm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw – 4-40
18 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
Qwiic – 0x77
Qwiic – 0x5B
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
——
DL2108Mk08p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - Terminal Block Breakout FeatherWing - Mk07
08-07
DL2108Mk07p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw - 4-40
18 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-07";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display BME280
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
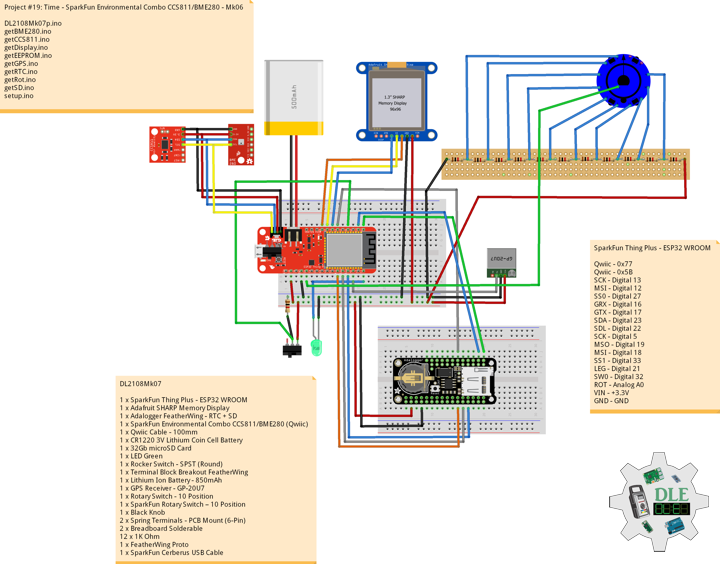
Project #19: Time – SparkFun Environmental Combo CCS811/BME280 – Mk06
——
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
SparkFun Environmental Combo Breakout – CCS811/BME280 (Qwiic)
The SparkFun CCS811/BME280 Environmental Combo Breakout takes care of all your atmospheric-quality sensing needs with the popular CCS811 and BME280 ICs. This unique breakout provides a variety of environmental data, including barometric pressure, humidity, temperature, TVOCs and equivalent eCO2 levels. To make it even easier to use this breakout, all communication is enacted exclusively via I2C, utilizing our handy Qwiic system. However, we still have broken out 0.1″ spaced pins in case you prefer to use a breadboard.
Bosch Sensortec BME280
The BME280 is as combined digital humidity, pressure and temperature sensor based on proven sensing principles. Its small dimensions and its low power consumption allow the implementation in battery driven devices such as handsets, GPS modules or watches. The BME280 achieves high performance in all applications requiring humidity and pressure measurement. These emerging applications of home automation control, indoor navigation, health care as well as GPS refinement require a high accuracy and a low TCO at the same time. The humidity sensor provides an extremely fast response time for fast context awareness applications and high overall accuracy over a wide temperature range. The pressure sensor is an absolute barometric pressure sensor with extremely high accuracy and resolution.
Typical Application
-Context awareness, e.g. skin detection, room change detection
-Health monitoring / well-being
-Warning regarding dehydration or heat stroke
-Spirometry (measurement of lung volume and air flow)
-Home automation control
-Control heating, venting, air conditioning (HVAC)
-Internet of Things
-GPS enhancement (e.g. time-to-first-fix improvement, dead reckoning, slope detection)
-Indoor navigation (change of floor detection, elevator detection)
-Outdoor navigation, leisure and sports applications
-Weather forecast
-Vertical velocity indication (rise/sink speed)
Target devices
-Handsets such as mobile phones, tablet PCs, GPS devices
-Navigation systems
-Gaming, e.g flying toys
-Camera (DSC, video)
-Portable health care devices
-Home weather stations
-Flying toys
-Watches
ams AG CCS811
The CCS811 is an exceedingly popular sensor, providing readings for equivalent eCO2 in the PPM and total volatile organic compounds in the PPB. The CCS811 is an ultra-low power digital gas sensor solution which integrates a metal oxide (MOX) gas sensor to detect a wide range of Volatile Organic Compounds (VOCs) for indoor air quality monitoring with a microcontroller unit (MCU), which includes an Analog-to-Digital converter (ADC), and an I²C interface.
DL2108Mk07
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Qwiic Cable – 100mm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
Qwiic – 0x77
Qwiic – 0x5B
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
——
DL2108Mk07p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - SparkFun Environmental Combo CCS811/BME280 - Mk06
08-07
DL2108Mk07p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-06";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display BME280
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – Adalogger FeatherWing – RTC + SD – Mk05
——
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
Adalogger FeatherWing – RTC + SD
A Feather board without ambition is a Feather board without FeatherWings. This is the Adalogger FeatherWing: it adds both a battery-backed Real Time Clock and MicroSD card storage to any Feather main board. This FeatherWing will make it real easy to add datalogging to any of our existing Feathers. You get both an I2C Real Time Clock (PCF8523) with 32KHz crystal and battery backup, and a MicroSD socket that connects to the SPI port pins.
MicroSD Card
If you have a project with any audio, video, graphics, data logging, etc in it, you’ll find that having a removable storage option is essential. Most microcontrollers have extremely limited built-in storage. If you’re doing any sort of data logging, graphics or audio, you’ll need at least a megabyte of storage, and 64M is probably the minimum.
MicroSD cards are ‘raw’ storage. They’re just sectors in a flash chip, there’s no structure that you have to use. That means you could format an SD card to be a Linux filesystem, a FAT (DOS) filesystem or a Mac filesystem. You could also not have any filesystem at all. However, 99% of computers, cameras, MP3 players, GPS loggers, etc require FAT16 or FAT32 for the filesystem. The tradeoff here is that for smaller microcontrollers the addition of the complex file format handling can take a lot of flash storage and RAM.
DL2108Mk06
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
12 x 1K Ohm
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
DL2108Mk06p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - Adalogger FeatherWing - RTC + SD - Mk05
08-06
DL2108Mk06p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
12 x 1K Ohm
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
// #include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-05";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 16, 12, 27, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3500 ) {
// Z
iRotVal = 10;
} else if ( z >= 3000 ) {
// Z
iRotVal = 9;
} else if ( z >= 2600 ) {
// Z
iRotVal = 8;
} else if ( z >= 2300 ) {
// Z
iRotVal = 7;
} else if ( z >= 1900 ) {
// Z
iRotVal = 6;
} else if ( z >= 1500 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 800 ) {
// Z
iRotVal = 3;
} else if ( z >= 400 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Z
isDisplayZ();
break;
case 6:
// Z
isDisplayZ();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
// Wire.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – Global Positioning System – Mk04
——
#DonLucElectronics #DonLuc #Time #DS3231PrecisionRTC #SHARPMemoryDisplay #GPSReceiver #Arduino #ESP32 #SparkFunThingPlusESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
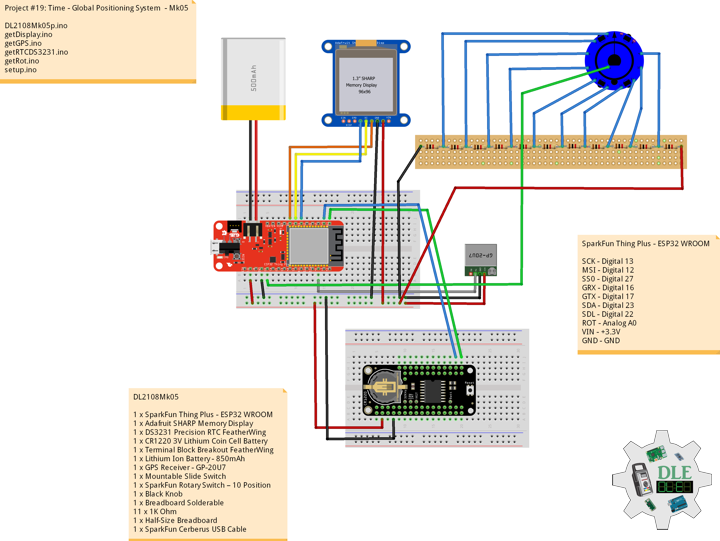
——
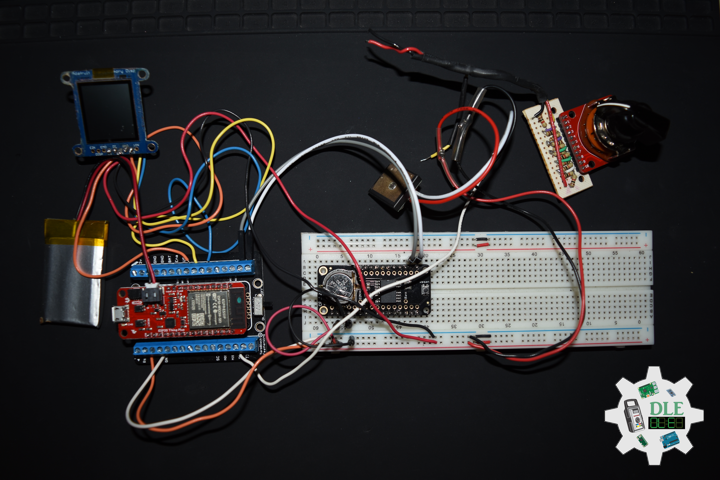
——
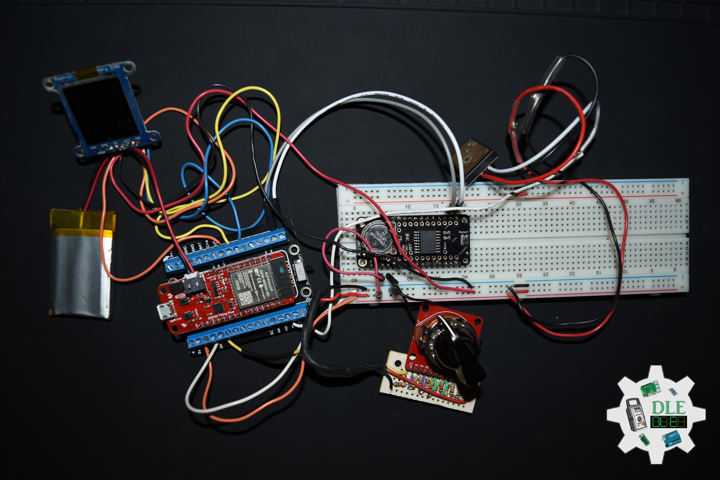
——
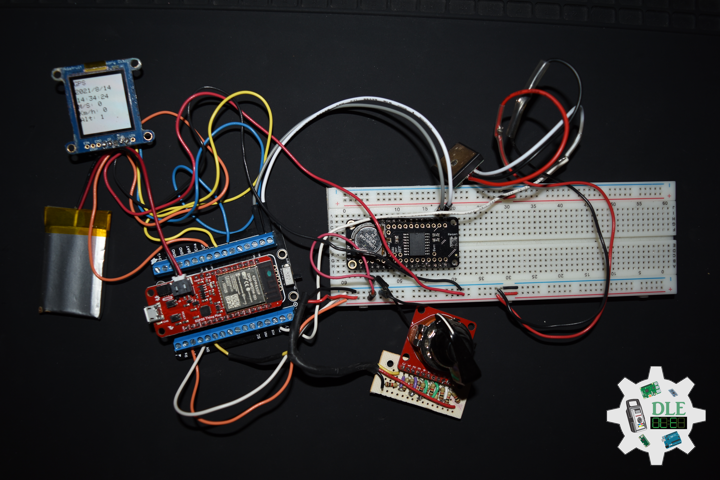
——
Global Positioning System (GPS)
The Global Positioning System (GPS) is a satellite-based radionavigation system owned by the United States government and operated by the United States Space Force. It is one of the global navigation satellite systems (GNSS) that provides geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. Obstacles such as mountains and buildings block the relatively weak GPS signals.
A satellite navigation device, colloquially called a GPS receiver, or simply a GPS, is a device that is capable of receiving information from GNSS satellites and then calculate the device’s geographical position. Using suitable software, the device may display the position on a map, and it may offer routing directions. The Global Positioning System (GPS) is one of a handful of global navigation satellite systems (GNSS) made up of a network of a minimum of 24, but currently 30, satellites placed into orbit by the U.S. Department of Defense.
A satellite navigation device can retrieve (from one or more satellite systems) location and time information in all weather conditions, anywhere on or near the Earth. GPS reception requires an unobstructed line of sight to four or more GPS satellites, and is subject to poor satellite signal conditions. Today, most standalone GPS receivers are used in automobiles. The GPS capability of smartphones may use assisted GPS (A-GPS) technology, which can use the base station or cell towers to provide a faster Time to First Fix (TTFF), especially when GPS signals are poor or unavailable. However, the mobile network part of the A-GPS technology would not be available when the smartphone is outside the range of the mobile reception network, while the GPS aspect would otherwise continue to be available.
DL2108Mk05
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
11 x 1K Ohm
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
ROT – Analog A0
VIN – +3.3V
GND – GND
DL2108Mk05p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - Global Positioning System - Mk04
08-05
DL2108Mk05p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
11 x 1K Ohm
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire
// #include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time DS3231 RTC
#include <RTClib.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
// Date
String sDate;
// Time
String sTime;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// Software Version Information
// Version
String sver = "19-04";
void loop()
{
// Dates and Time
timeRTC();
// isGPS
isGPS();
// Rotary Switch
isRot();
delay( 1000 );
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( sDate );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( sTime );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin()) {
while (1);
}
// Date Time
DateTime now = RTC.now();
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2021, 8, 2, 14, 11, 0));
}
}
// timeRTC
void timeRTC() {
// DS3231 Precision RTC
sDate = "";
sTime = "";
// Date Time
DateTime now = RTC.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3500 ) {
// Z
iRotVal = 10;
} else if ( z >= 3000 ) {
// Z
iRotVal = 9;
} else if ( z >= 2600 ) {
// Z
iRotVal = 8;
} else if ( z >= 2300 ) {
// Z
iRotVal = 7;
} else if ( z >= 1900 ) {
// Z
iRotVal = 6;
} else if ( z >= 1500 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 800 ) {
// Z
iRotVal = 3;
} else if ( z >= 400 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Z
isDisplayZ();
break;
case 6:
// Z
isDisplayZ();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
setup.ino
// Setup
void setup()
{
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
// Wire.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Setup RTC
setupRTC();
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – GPS Receiver – GP-20U7 – Mk03
——
#DonLucElectronics #DonLuc #Time #DS3231PrecisionRTC #SHARPMemoryDisplay #GPSReceiver #Arduino #ESP32 #SparkFunThingPlusESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
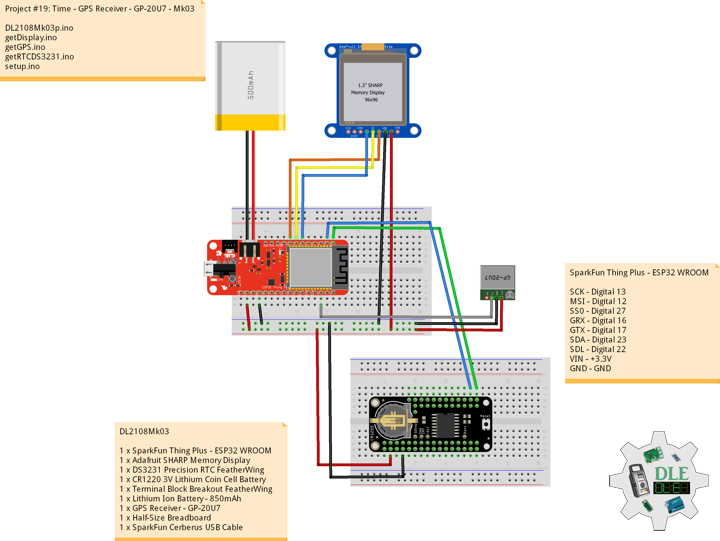
——
——
——
——
——
GPS Receiver – GP-20U7
The GP-20U7 is a compact GPS receiver with a built-in high performances all-in-one GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
This 56-channel GPS module, that supports a standard NMEA-0183 and uBlox 7 protocol, has low power consumption of 40mA@3.3V (max), an antenna on board, and -162dBm tracking sensitivity. With 56 channels in search mode and 22 channels “all-in-view” tracking, the GP-20U7 is quite the work horse for its size.
This one is unused and doesnt have a conection TX pin.
NMEA V3.01 Protocol
- Its output signal level is TTL: 9600bps (default), 8 bit data, 1 stop bit and no parity
- It supports the following NMEA-0183
- Messages: GGA, GLL, GSA, GSV, RMC and VTG
NMEA-0183 Output Messages
- NMEA: Record Description
- GGA: Global positoning system fixed data
- GLL: Geogrphic position – latitude / longitude
- GSA: GNSS DOP and active satellites
- GSV: GNSS satellites in view
- RMC: Recommended minimum specific GNSS data
- VTG: Course over ground and ground speed
DL2108Mk03
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
VIN – +3.3V
GND – GND
DL2108Mk03p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time -GPS Receiver - GP-20U7 - Mk03
08-03
DL2108Mk03p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire
// #include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time DS3231 RTC
#include <RTClib.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
String sDate;
String sTime;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
String GPSSt = "";
// Software Version Information
// Version
String sver = "19-03";
void loop()
{
// Dates and Time
timeRTC();
// isGPS
isGPS();
// Display Date, Time, GPS
isDisplayDate();
delay( 1000 );
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( sDate );
// Time
display.setCursor(0,30);
display.println( sTime );
// GPS Status
display.setCursor(0,55);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,75);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,145);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSStatus = 2;
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSStatus = 0;
GPSSt = "No";
}
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin()) {
while (1);
}
// Date Time
DateTime now = RTC.now();
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2021, 8, 2, 14, 11, 0));
}
}
// timeRTC
void timeRTC() {
// DS3231 Precision RTC
sDate = "";
sTime = "";
// Date Time
DateTime now = RTC.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
setup.ino
// Setup
void setup()
{
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
// Wire.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Setup RTC
setupRTC();
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – SHARP Memory Display – Mk02
——
#DonLucElectronics #DonLuc #Time #DS3231PrecisionRTC #SHARPMemoryDisplay #Arduino #ESP32 #SparkFunThingPlusESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
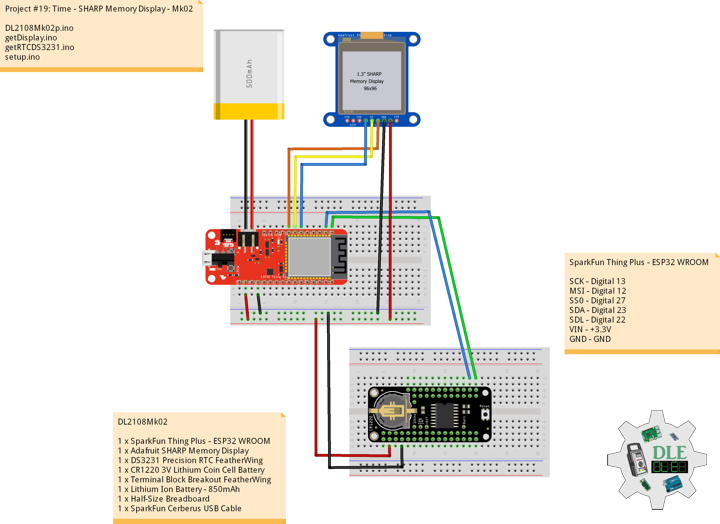
——
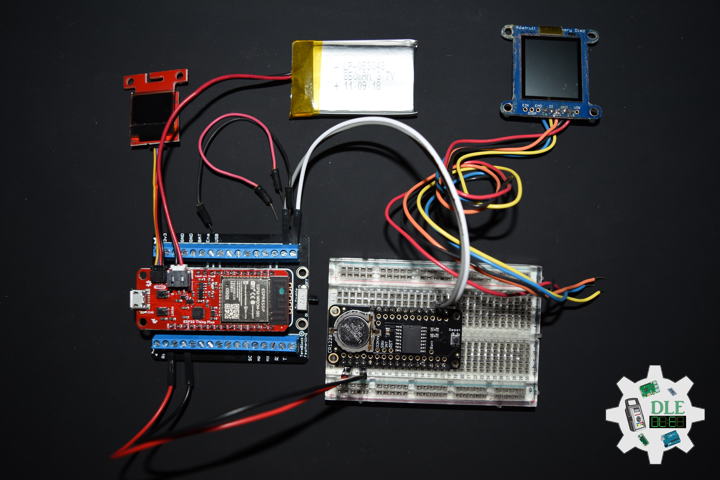
——
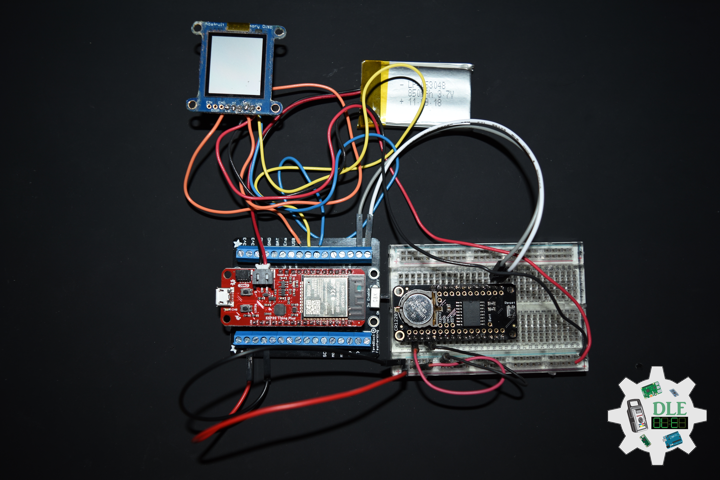
——
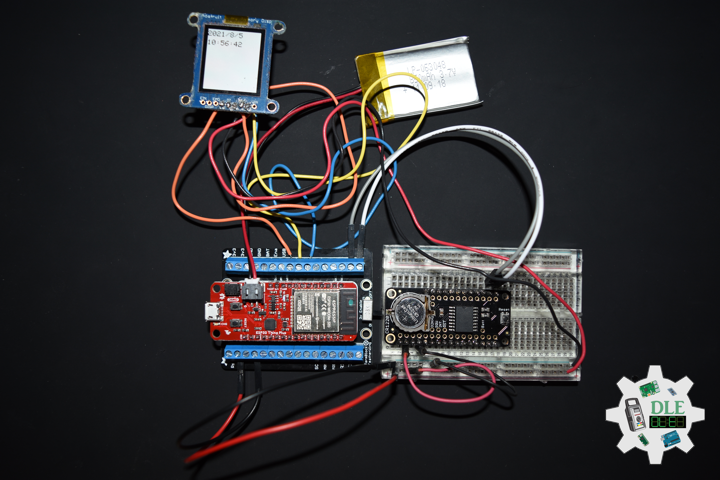
——
Adafruit SHARP Memory Display Breakout – 1.3 Inches – 168 Pixels x 144 Pixels Monochrome
The 1.3 inches 168 pixels x 144 pixels SHARP Memory LCD display is a cross between an eInk display and an LCD. It has the ultra-low power usage of eInk and the fast-refresh rates of an LCD. This model has a gray background, and pixels show up as black-on-gray for a nice e-reader type display. It does not have a backlight, but it is daylight readable. For dark/night reading you may need to illuminate the LCD area with external LEDs.
The display is write only which means that it only needs 3 pins to send data. However, the downside of a write-only display is that the entire 168×144 bits must be buffered by the microcontroller driver. That means you cannot use this with an ATmega328 or ATmega32u4. You must use a high-RAM chip such as ATSAMD21, Teensy 3, ESP8266, ESP32, etc. On those chips, this display works great and looks wonderful.
DL2108Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
SDA – Digital 23
SDL – Digital 22
VIN – +3.3V
GND – GND
DL2108Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #19: Time -SHARP Memory Display - Mk02
08-02
DL2108Mk02p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Qwiic Cable - 50mm
1 x Lithium Ion Battery - 850mAh
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time DS3231 RTC
#include <RTClib.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Set this to 1000 to get _about_ 1 second timing
const int CLOCK_SPEED = 1000;
// Last Draw
unsigned long lastDraw = 0;
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
String sDate;
String sTime;
// Software Version Information
// Version
String sver = "19-02";
void loop()
{
// Check if we need to update date, time
if (lastDraw + CLOCK_SPEED < millis())
{
// Last Draw
lastDraw = millis();
// Dates and Time
timeRTC();
// is OLED
//isOLED();
isDisplayDate();
}
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( sDate );
// Time
display.setCursor(0,30);
display.println( sTime );
// Refresh
display.refresh();
delay( 100 );
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin()) {
while (1);
}
DateTime now = RTC.now();
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2021, 8, 2, 14, 11, 0));
}
}
// timeRTC
void timeRTC() {
// DS3231 Precision RTC
sDate = "";
sTime = "";
// Date Time
DateTime now = RTC.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Setup RTC
setupRTC();
delay( 5000 );
}
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – DS3231 Precision RTC – Mk01
——
#DonLucElectronics #DonLuc #Time #DS3231PrecisionRTC #Arduino #ESP32 #SparkFunThingPlusESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
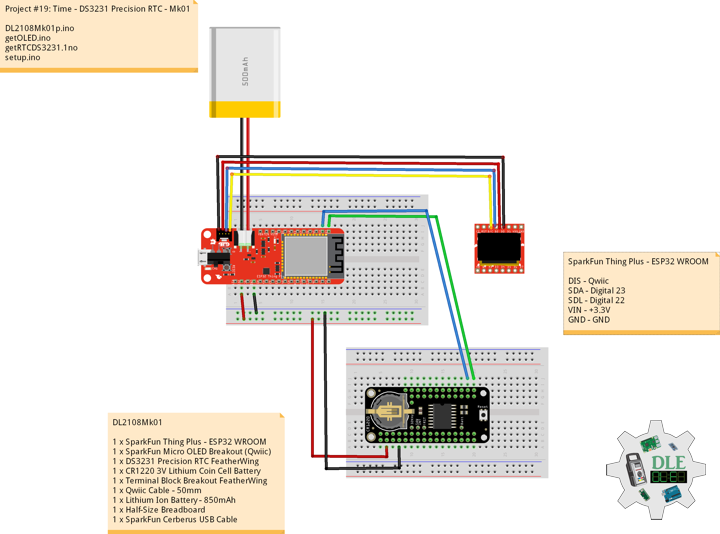
——
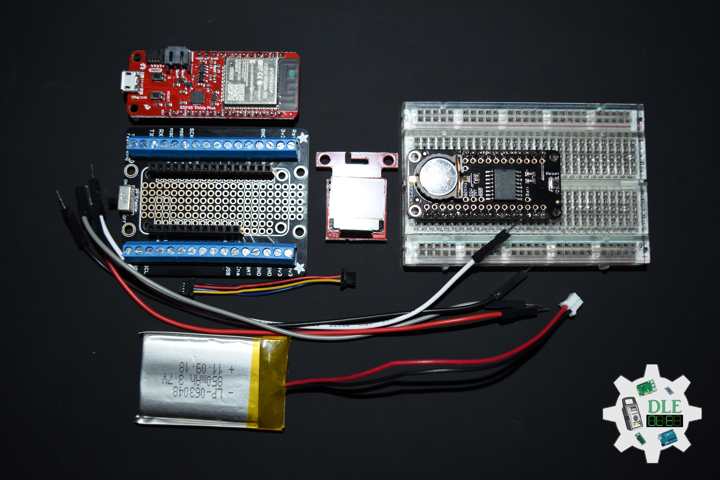
——
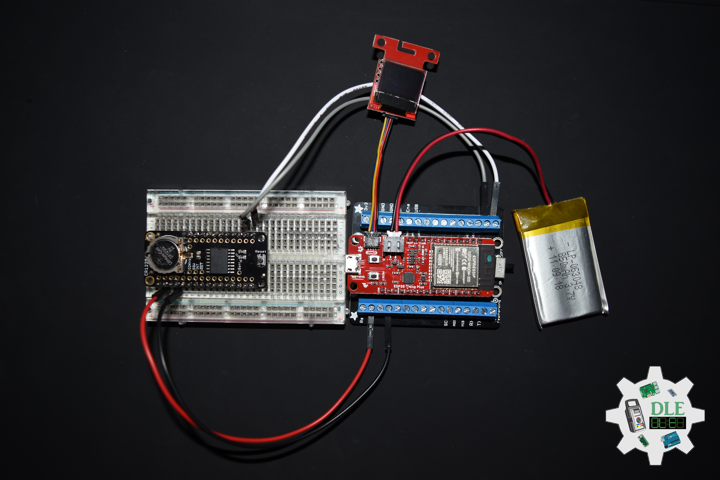
——
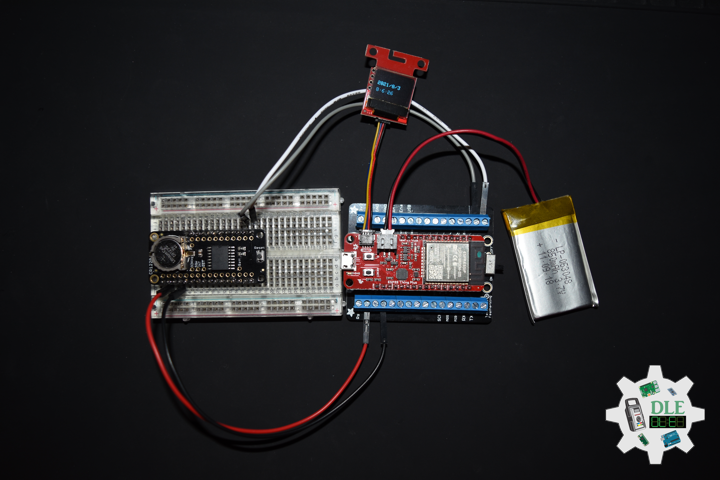
——
DS3231 Precision RTC FeatherWing
A Feather board without ambition is a Feather board without FeatherWings. This is the DS3231 Precision RTC FeatherWing: it adds an extremely accurate I2C-integrated Real Time Clock (RTC) with a Temperature Compensated Crystal Oscillator (TCXO) to any Feather main board. This RTC is the most precise you can get in a small, low power package. Most RTCs use an external 32kHz timing crystal that is used to keep time with low current draw. And that’s all well and good, but those crystals have slight drift, particularly when the temperature changes. This RTC is in a beefy package because the crystal is inside the chip. And right next to the integrated crystal is a temperature sensor. That sensor compensates for the frequency changes by adding or removing clock ticks so that the timekeeping stays on schedule.
SparkFun Micro OLED Breakout (Qwiic)
The SparkFun Qwiic Micro OLED Breakout is a Qwiic-enabled version of our popular Micro OLED display. The small monochrome, blue-on-black OLED screen presents incredibly clear images for your viewing pleasure. The OLED display is crisp, and you can fit a deceivingly large amount of graphics on there. This breakout is perfect for adding graphics to your next project and displaying diagnostic information without resorting to a serial output, all with the ease of use of our own Qwiic Connect System.
DL2108Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Qwiic Cable – 50mm
1 x Lithium Ion Battery – 850mAh
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
DIS – Qwiic
SDA – Digital 23
SDL – Digital 22
VIN – +3.3V
GND – GND
DL2108Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - DS3231 Precision RTC - Mk01
08-01
DL2108Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x Qwiic Cable - 50mm
1 x Lithium Ion Battery - 850mAh
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
#include <Wire.h>
// OLED
#include <SFE_MicroOLED.h>
// Date and time DS3231 RTC
#include <RTClib.h>
// OLED
// DC Jumper
#define DC_JUMPER 1
// Optional - Connect RST on display to pin 9 on Arduino
#define PIN_RESET 9
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Set this to 1000 to get _about_ 1 second timing
const int CLOCK_SPEED = 1000;
// Last Draw
unsigned long lastDraw = 0;
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
String sDate;
String sTime;
// Software Version Information
// Version
String sver = "19-01";
void loop()
{
// Check if we need to update date, time
if (lastDraw + CLOCK_SPEED < millis())
{
// Last Draw
lastDraw = millis();
// Dates and Time
timeRTC();
// is OLED
isOLED();
}
}
getOLED.ino
// OLED
// Setup OLED
void setupOLED(){
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(PAGE);
// Clear the library's display buffer
oled.clear(ALL);
// Display what's in the buffer
oled.display();
}
// isOLED
void isOLED(){
// Clear the buffer
oled.clear(PAGE);
// Set font to type 0
oled.setFontType(0);
// Date
// Set cursor to top-left
oled.setCursor(0, 18);
oled.print( sDate );
// Time
// Set cursor to top-left
oled.setCursor(0, 32);
oled.print( sTime );
// Draw the memory buffer
oled.display();
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin()) {
while (1);
}
DateTime now = RTC.now();
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2021, 8, 2, 14, 11, 0));
}
}
// timeRTC
void timeRTC() {
// DS3231 Precision RTC
sDate = "";
sTime = "";
// Date Time
DateTime now = RTC.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Initialize the OLED
setupOLED();
// Setup RTC
setupRTC();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #15: Environment – PIR Motion Sensor – Mk12
——
#DonLuc #Environment #ESP32 #MQ #GPS #EMF #PIR #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Consultant #Electronics #Microcontrollers #Vlog #Aphasia
——
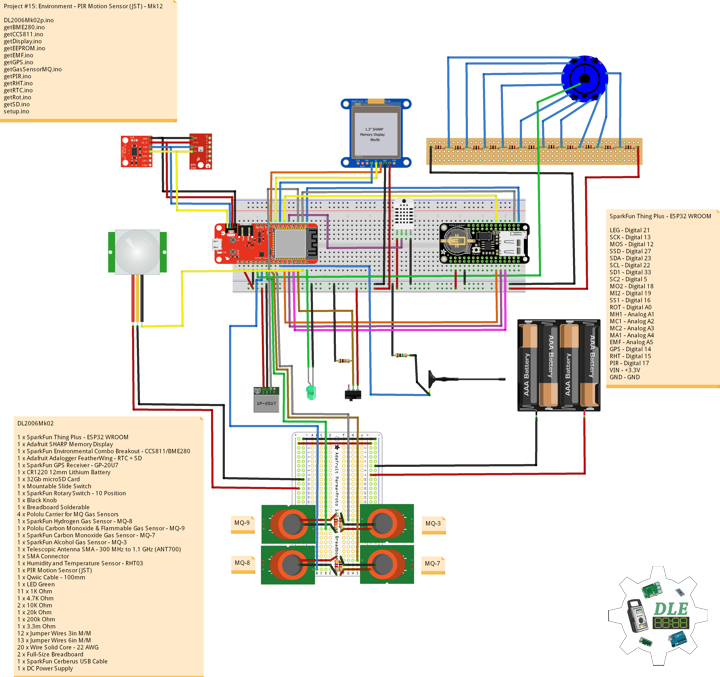
——
——
——
PIR Motion Sensor (JST)
SparkFun Item: SEN-13285
This is a simple to use motion sensor. Power it up and wait 1-2 seconds for the sensor to get a snapshot of the still room. If anything moves after that period, the ‘alarm’ pin will go low. The alarm pin is an open collector meaning you will need a pull up resistor on the alarm pin. The open drain setup allows multiple motion sensors to be connected on a single input pin. If any of the motion sensors go off, the input pin will be pulled low.
We’ve finally updated the connector! Gone is the old “odd” connector, now you will find a common 3-pin JST! This makes the PIR Sensor much more accessible for whatever your project may need. Red = Power, White = Ground, and Black = Alarm.
DL2006Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x Humidity and Temperature Sensor – RHT03
1 x PIR Motion Sensor (JST)
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
1 x 200k Ohm
1 x 3.3m Ohm
12 x Jumper Wires 3in M/M
13 x Jumper Wires 6in M/M
20 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A1
MH1 – Analog A0
MC1 – Analog A2
MC2 – Analog A3
MA1 – Analog A4
EMF – Analog A5
GPS – Digital 14
RHT – Digital 15
PIR – Digital 17
VIN – +3.3V
GND – GND
DL2006Mk02p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - PIR Motion Sensor (JST) - Mk12
// 06-02
// DL2006Mk02p.ino 15-12
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 4 x Pololu Carrier for MQ Gas Sensors
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x SparkFun Alcohol Gas Sensor - MQ-3
// 1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
// 1 x SMA Connector
// 1 x Humidity and Temperature Sensor - RHT03
// 1 x PIR Motion Sensor (JST)
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 2 x 10K Ohm
// 1 x 20k Ohm
// 1 x 200k Ohm
// 1 x 3.3m Ohm
// 12 x Jumper Wires 3in M/M
// 13 x Jumper Wires 6in M/M
// 20 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// RHT Humidity and Temperature Sensor
#include <SparkFun_RHT03.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A4;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// EMF Meter (Single Axis)
int iEMF = A5;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int valEMF = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
int iEMFDis = 0;
int iEMFRect = 0;
// RHT Humidity and Temperature Sensor
// RHT03 data pin Digital 15
const int RHT03_DATA_PIN = 15;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// PIR Motion
// Motion detector
const int iMotion = 17;
// Proximity
int proximity = LOW;
String Det = "";
// Software Version Information
String sver = "15-12";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// EMF Meter (Single Axis)
isEMF();
// RHT03 Humidity and Temperature Sensor
isRHT03();
// isPIR Motion
isPIR();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas H2 MQ8" );
display.setCursor(0,30);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,50);
display.println( "Gas CO MQ9" );
display.setCursor(0,70);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,90);
display.println( "Gas CO MQ7" );
display.setCursor(0,110);
display.print( iMQ7ppm );
display.println( " ppm" );
display.setCursor(0,130);
display.println( "BAC MQ3" );
display.setCursor(0,150);
display.print( iMQ3ppm );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
// EMF Meter (Single Axis)
void isDisplayEMF() {
// Text Display EMF Meter
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// EMF Meter
display.setCursor(0,10);
display.println( "EMF Meter" );
display.setCursor(0,30);
display.print( "EMF: " );
display.println( averageEMF );
display.setCursor(0,50);
display.println( iEMFDis );
display.setCursor(0,70);
display.setTextSize(1);
display.println( "0 1 2 3 4 5 6 7 8 9 10" );
display.setCursor(0,90);
display.drawRect(0, 90, iEMFRect , display.height(), BLACK);
display.fillRect(0, 90, iEMFRect , display.height(), BLACK);
// Refresh
display.refresh();
delay( 100 );
}
// Display PIR Motion
void isDisplayPIR() {
// Text Display PIR
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// PIR Motion
display.setCursor(0,10);
display.println( "PIR Motion" );
display.setCursor(0,30);
display.println( Det );
// Refresh
display.refresh();
delay( 100 );
}
// Display RHT
void isDisplayRHT() {
// Text Display RHT
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature
display.setCursor(0,10);
display.println( "Temp C" );
display.setCursor(0,30);
display.print( latestTempC );
display.println( "C" );
// Temp F
display.setCursor(0,60);
display.println( "Temp F" );
display.setCursor(0,80);
display.print( latestTempF );
display.println( "F" );
// Humidity
display.setCursor(0,110);
display.println( "Humidity" );
display.setCursor(0,130);
display.print( latestHumidity );
display.println( " %" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getEMF.ino
// EMF Meter (Single Axis)
// Setup EMF Meter
void isSetupEMF() {
// EMF Meter (Single Axis)
pinMode( iEMF, OUTPUT );
for (int i = 0; i < NUMREADINGS; i++){
readings[ i ] = 0; // Initialize all the readings to 0
}
}
// EMF Meter
void isEMF() {
// Probe EMF Meter
// Take a reading from the probe
valEMF = analogRead( iEMF );
// If the reading isn't zero, proceed
if( valEMF >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
valEMF = constrain( valEMF, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
valEMF = map( valEMF, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = valEMF;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If we're at the end of the array...
if ( indexEMF >= NUMREADINGS ) {
// Wrap around to the beginning
indexEMF = 0;
}
// Calculate the average
averageEMF = totalEMF / NUMREADINGS;
iEMFDis = averageEMF;
iEMFRect = map( averageEMF, 1, 1023, 1, 144 );
}
else
{
averageEMF = 0;
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
}
}
getRHT.ino
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
void setupRTH03() {
// RHT03 Humidity and Temperature Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT03 Humidity and Temperature Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// RHT03 Humidity and Temperature Sensor
isDisplayRHT();
break;
case 4:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 5:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 6:
// EMF Meter (Single Axis)
isDisplayEMF();
break;
case 7:
// Display PIR Motion
isDisplayPIR();
break;
case 8:
// Display UID
isDisplayUID();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|Latest Temp C|Latest Temp F|Latest Humidity|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7|Alcohol Gas Sensor MQ-3|EMF Meter (Single Axis)|PIR Motion
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + latestTempC + "|" + latestTempF + "|" + latestHumidity + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|" + iMQ9ppm + "|" + iMQ3ppm + "|" + averageEMF + "|" + Det + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
// EMF Meter (Single Axis) - Setup
isSetupEMF();
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
// PIR Motion
// Setup PIR
setupPIR();
delay( 5000 );
}
Technology Experience
- Single-Board Microcontrollers (Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
Project #15: Environment – Humidity and Temperature Sensor – RHT03 – Mk11
——
#DonLuc #Environment #ESP32 #MQ #GPS #EMF #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Consultant #Electronics #Microcontrollers #Vlog #Aphasia
——
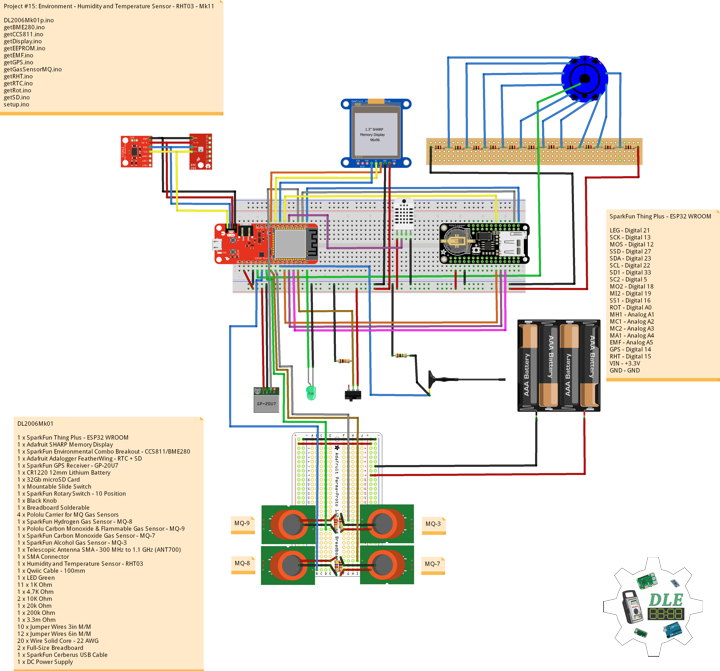
——
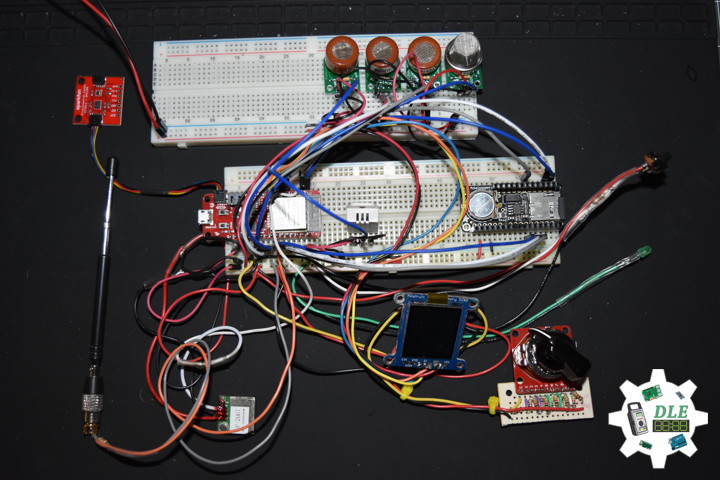
——
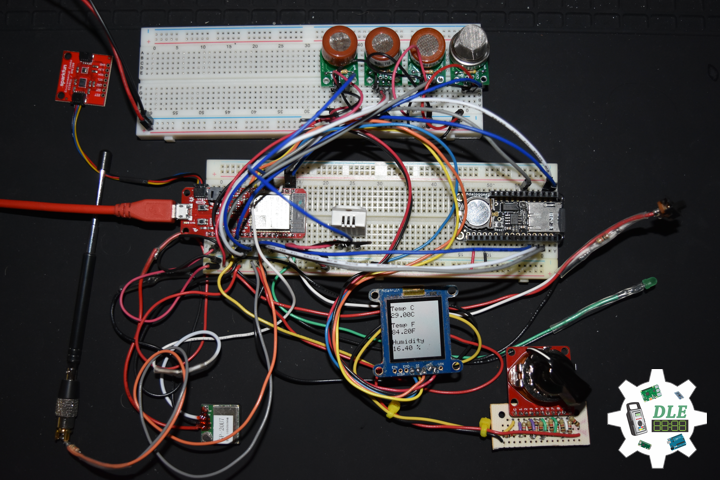
——
Humidity and Temperature Sensor – RHT03
SparkFun Item: SEN-10167
The RHT03 is a low cost humidity and temperature sensor with a single wire digital interface. The sensor is calibrated and doesn’t require extra components so you can get right to measuring relative humidity and temperature.
DL2006Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x Humidity and Temperature Sensor – RHT03
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
1 x 200k Ohm
1 x 3.3m Ohm
10 x Jumper Wires 3in M/M
12 x Jumper Wires 6in M/M
20 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A1
MH1 – Analog A0
MC1 – Analog A2
MC2 – Analog A3
MA1 – Analog A4
EMF – Analog A5
GPS – Digital 14
RHT – Digital 15
VIN – +3.3V
GND – GND
DL2006Mk01p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - Humidity and Temperature Sensor - RHT03 - Mk11
// 06-01
// DL2006Mk01p.ino 15-11
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 4 x Pololu Carrier for MQ Gas Sensors
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x SparkFun Alcohol Gas Sensor - MQ-3
// 1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
// 1 x SMA Connector
// 1 x Humidity and Temperature Sensor - RHT03
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 2 x 10K Ohm
// 1 x 20k Ohm
// 1 x 200k Ohm
// 1 x 3.3m Ohm
// 10 x Jumper Wires 3in M/M
// 12 x Jumper Wires 6in M/M
// 20 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// RHT Humidity and Temperature Sensor
#include <SparkFun_RHT03.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A4;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// EMF Meter (Single Axis)
int iEMF = A5;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int valEMF = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
int iEMFDis = 0;
int iEMFRect = 0;
// RHT Humidity and Temperature Sensor
// RHT03 data pin Digital 15
const int RHT03_DATA_PIN = 15;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// Software Version Information
String sver = "15-11";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// EMF Meter (Single Axis)
isEMF();
// RHT03 Humidity and Temperature Sensor
isRHT03();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas H2 MQ8" );
display.setCursor(0,30);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,50);
display.println( "Gas CO MQ9" );
display.setCursor(0,70);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,90);
display.println( "Gas CO MQ7" );
display.setCursor(0,110);
display.print( iMQ7ppm );
display.println( " ppm" );
display.setCursor(0,130);
display.println( "BAC MQ3" );
display.setCursor(0,150);
display.print( iMQ3ppm );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
// EMF Meter (Single Axis)
void isDisplayEMF() {
// Text Display EMF Meter
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// EMF Meter
display.setCursor(0,10);
display.println( "EMF Meter" );
display.setCursor(0,30);
display.print( "EMF: " );
display.println( averageEMF );
display.setCursor(0,50);
display.println( iEMFDis );
display.setCursor(0,70);
display.setTextSize(1);
display.println( "0 1 2 3 4 5 6 7 8 9 10" );
display.setCursor(0,90);
display.drawRect(0, 90, iEMFRect , display.height(), BLACK);
display.fillRect(0, 90, iEMFRect , display.height(), BLACK);
// Refresh
display.refresh();
delay( 100 );
}
// Display RHT
void isDisplayRHT() {
// Text Display RHT
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature
display.setCursor(0,10);
display.println( "Temp C" );
display.setCursor(0,30);
display.print( latestTempC );
display.println( "C" );
// Temp F
display.setCursor(0,60);
display.println( "Temp F" );
display.setCursor(0,80);
display.print( latestTempF );
display.println( "F" );
// Humidity
display.setCursor(0,110);
display.println( "Humidity" );
display.setCursor(0,130);
display.print( latestHumidity );
display.println( " %" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getEMF.ino
// EMF Meter (Single Axis)
// Setup EMF Meter
void isSetupEMF() {
// EMF Meter (Single Axis)
pinMode( iEMF, OUTPUT );
for (int i = 0; i < NUMREADINGS; i++){
readings[ i ] = 0; // Initialize all the readings to 0
}
}
// EMF Meter
void isEMF() {
// Probe EMF Meter
// Take a reading from the probe
valEMF = analogRead( iEMF );
// If the reading isn't zero, proceed
if( valEMF >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
valEMF = constrain( valEMF, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
valEMF = map( valEMF, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = valEMF;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If we're at the end of the array...
if ( indexEMF >= NUMREADINGS ) {
// Wrap around to the beginning
indexEMF = 0;
}
// Calculate the average
averageEMF = totalEMF / NUMREADINGS;
iEMFDis = averageEMF;
iEMFRect = map( averageEMF, 1, 1023, 1, 144 );
}
else
{
averageEMF = 0;
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getRHT.ino
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
void setupRTH03() {
// RHT03 Humidity and Temperature Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT03 Humidity and Temperature Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// RHT03 Humidity and Temperature Sensor
isDisplayRHT();
break;
case 4:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 5:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 6:
// EMF Meter (Single Axis)
isDisplayEMF();
break;
case 7:
// Display UID
isDisplayUID();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|Latest Temp C|Latest Temp F|Latest Humidity|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7|Alcohol Gas Sensor MQ-3|EMF Meter (Single Axis)
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + latestTempC + "|" + latestTempF + "|" + latestHumidity + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|" + iMQ9ppm + "|" + iMQ3ppm + "|" + averageEMF + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
// EMF Meter (Single Axis) - Setup
isSetupEMF();
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
delay( 5000 );
}
Technology Experience
- Single-Board Microcontrollers (Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc