Battery
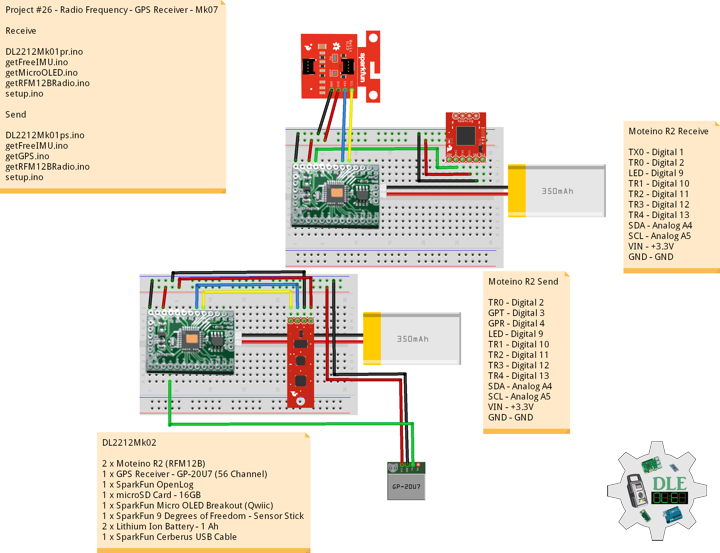
Project #26 – Radio Frequency – GPS Receiver – Mk07
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #GPSReceiver #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
GPS Receiver – GP-20U7 (56 Channel)
The GP-20U7 is a compact GPS receiver with a built-in high performances all-in-one GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
This 56-channel GPS module, that supports a standard NMEA-0183 and uBlox 7 protocol, has low power consumption of 40mA@3.3V (Max), an antenna on board, and -162dBm tracking sensitivity. With 56 channels in search mode and 22 channels “All-In-View” tracking, the GP-20U7 is quite the work horse for its size.
DL2212Mk02
2 x Moteino R2 (RFM12B)
1 x GPS Receiver – GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk02pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - GPS Receiver - Mk07
26-07
Receive
DL2212Mk02pr.ino
2 x Moteino R2 (RFM12B)
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-07";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// msg = "<IMU|Yaw|Pitch|Roll|GPS Status|Latitude|Longitude|Date|Time|*"
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt
// + "|" + TargetLat + "|" TargetLon + "|" + TargetDat +"|" + TargetTim + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
GPT – Digital 3
GPR – Digital 4
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk02ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - GPS Receiver - Mk07
26-07
Send
DL2212Mk02ps.ino
2 x Moteino R2 (RFM12B)
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// GPS Receiver
#include <TinyGPS++.h>
// Software Serial
#include <SoftwareSerial.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// GPS Receiver
#define gpsRXPIN 4
// This one is unused and doesnt have a conection
#define gpsTXPIN 3
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
String sLat = "";
// Longitude
float TargetLon;
String sLon = "";
// GPS Date, Time
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Status
String GPSSt = "";
// The serial connection to the GPS device
SoftwareSerial tGPS(gpsRXPIN, gpsTXPIN);
// Software Version Information
String sver = "26-07";
void loop()
{
// isGPS
isGPS();
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// Latitude and Longitude
sLat = "";
sLon = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// Latitude and Longitude
sLat.concat( TargetLat );
sLon.concat( TargetLon );
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|Yaw|Pitch|Roll|GPS Status|Latitude|Longitude|Date|Time|*"
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt
// + "|" + TargetLat + "|" TargetLon + "|" + TargetDat +"|" + TargetTim + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt + "|"
+ sLat + "|" + sLon + "|" + TargetDat + "|" + TargetTim + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// GPS Receiver
// Setup GPS
setupGPS();
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
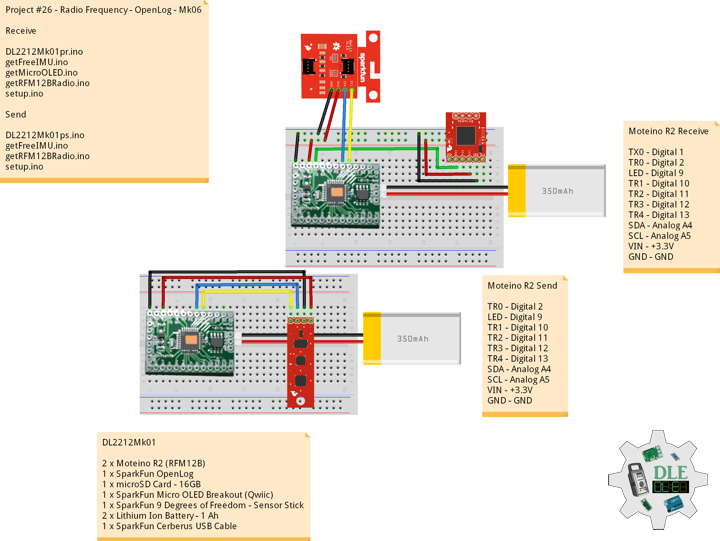
Project #26 – Radio Frequency – OpenLog – Mk06
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun OpenLog
The SparkFun OpenLog is an open source data logger that works over a simple serial connection and supports microSD cards up to 32GB. The OpenLog can store or “Log” huge amounts of serial data and act as a black box of sorts to store all the serial data that your project generates, for scientific or debugging purposes.
The SparkFun OpenLog uses an ATmega328 running at 16MHz thanks to the onboard resonator. The OpenLog draws approximately 2-3mA in idle mode. During a full record OpenLog can draw 10 to 20mA depending on the microSD card being used.
All data logged by the OpenLog is stored on the microSD card. Any 512MB to 32GB microSD card should work. OpenLog supports both FAT16 and FAT32 SD formats.
DL2212Mk01
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Receive
DL2212Mk01pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-06";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Send
DL2212Mk01ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-06";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Display – Mk05
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun Micro OLED Breakout
The SparkFun Qwiic Micro OLED Breakout is a Qwiic-enabled version of our popular Micro OLED display. The small monochrome, blue-on-black OLED screen presents incredibly clear images for your viewing pleasure. It’s the OLED display is crisp, and you can fit a deceivingly large amount of graphics on there. This breakout is perfect for adding graphics to your next project and displaying diagnostic information without resorting to a serial output, all with the ease of use of our own Qwiic Connect System.
This version of the Micro OLED Breakout is exactly the size of its non-Qwiic sibling, featuring a screen that is 64 pixels wide and 48 pixels tall and measuring 0.66″ across. But it has also been equipped with two Qwiic connectors, making it ideal for I2C operations. We’ve also added two mounting holes and a convenient Qwiic cable holder incorporated into a detachable tab on the board that can be easily removed thanks to a v-scored edge.
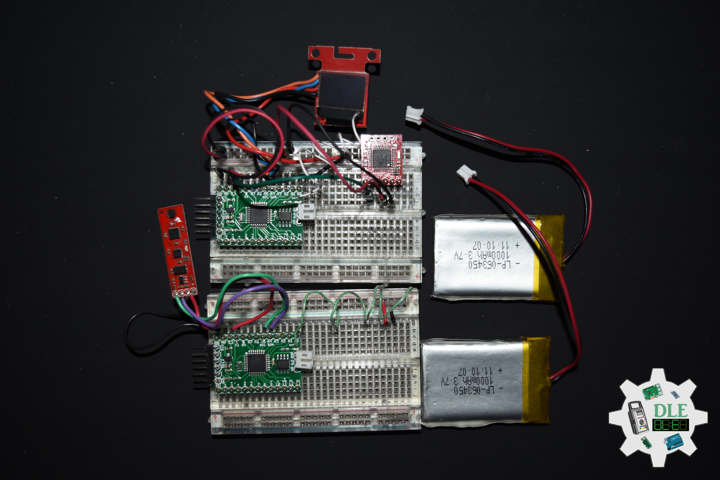
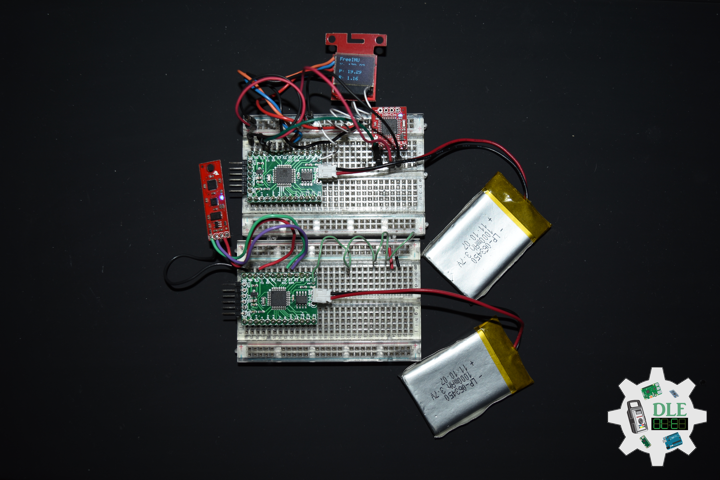
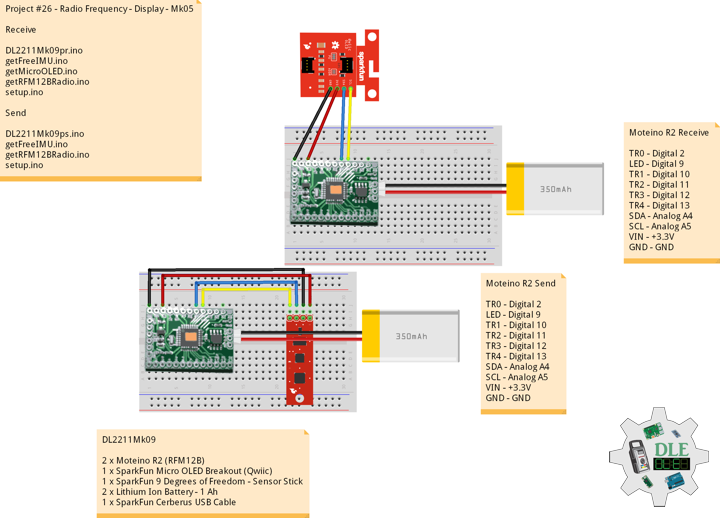
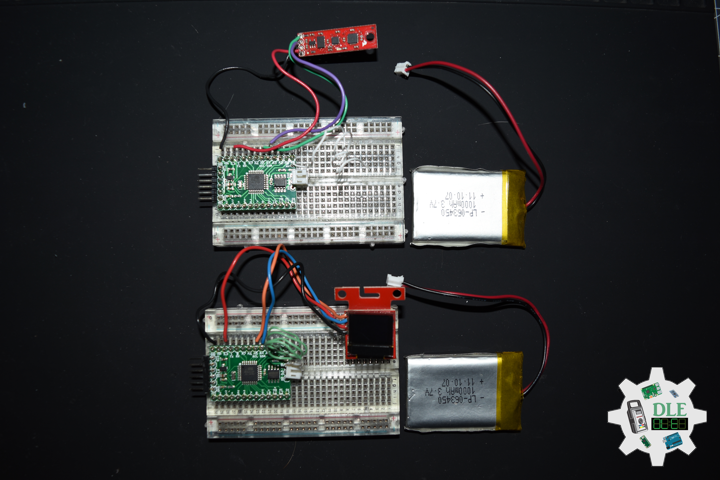
DL2211Mk09
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Receive
DL2211Mk09pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-05";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Send
DL2211Mk09ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-05";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
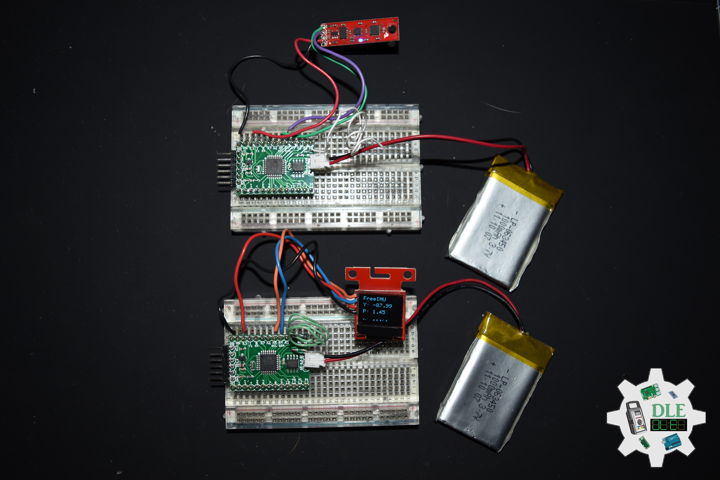
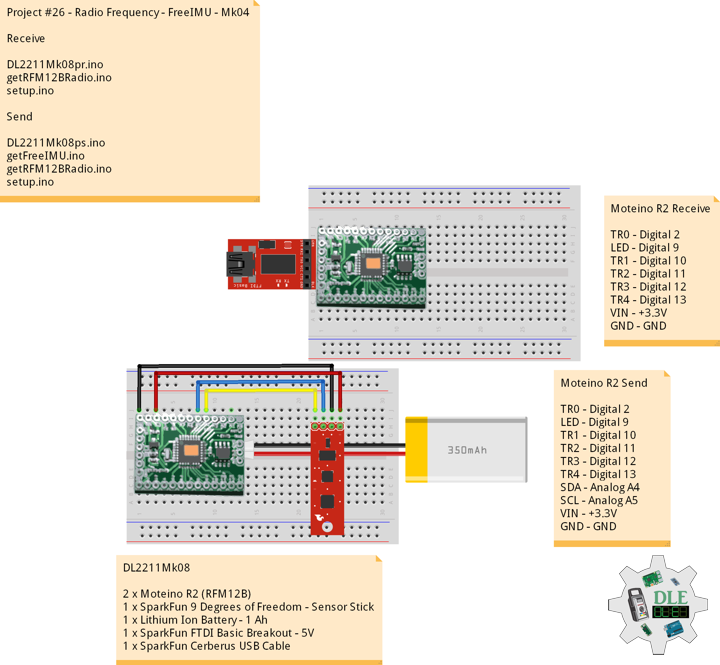
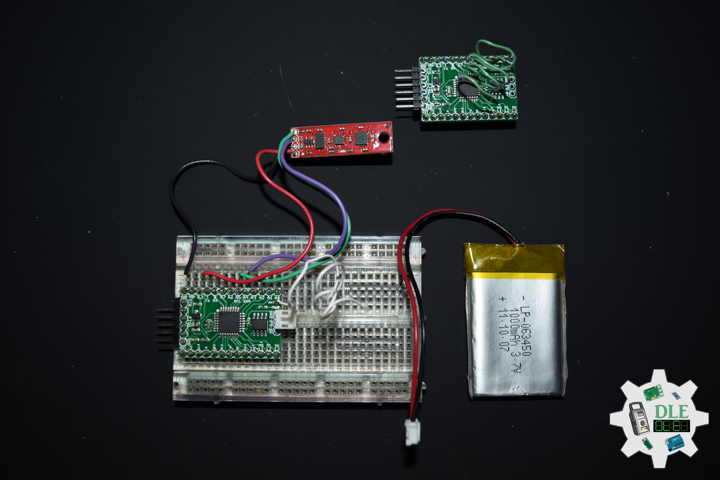
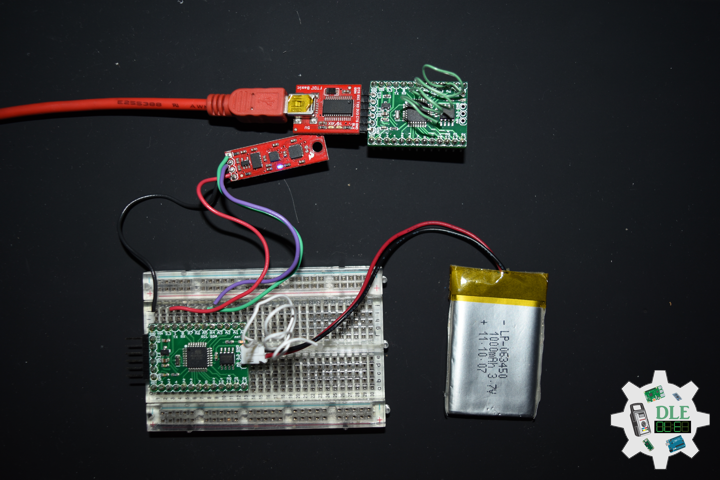
Project #26 – Radio Frequency – FreeIMU – Mk04
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
FreeIMU
Orientation and Motion Sensing are widely implemented on various consumer products, such as mobile phones, tablets and cameras as they enable immediate interaction with virtual information. The prototyping phase of any orientation and motion sensing capable device is however a quite difficult process as it may involve complex hardware designing, math algorithms and programming. FreeIMU, an Open Hardware Framework for prototyping orientation and motion sensing capable devices. The framework consists in a small circuit board containing various sensors and a software library, built on top of the Arduino platform. Both the hardware and library are released under open licences and supported by an active community allowing to be implemented into research and commercial projects.
DL2211Mk08
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
——
DL2211Mk08pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - FreeIMU - Mk04
26-04
Receive
DL2211Mk08pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-04";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk08ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - FreeIMU - Mk04
26-04
Send
DL2211Mk08ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-04";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
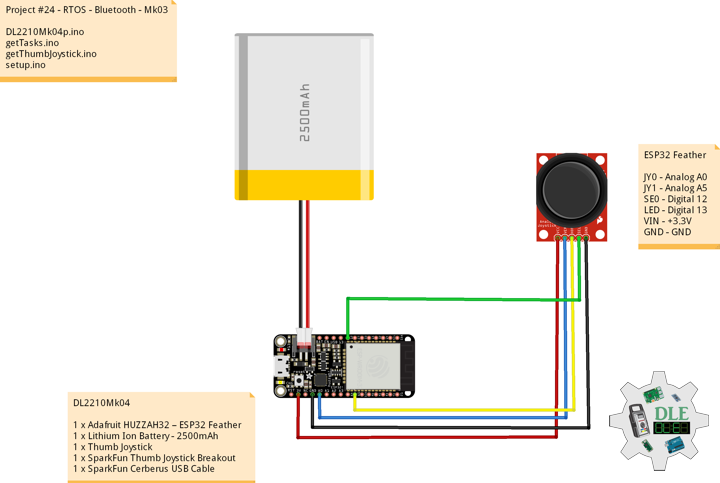
Project #24 – RTOS – Bluetooth – Mk03
——
#DonLucElectronics #DonLuc #ESP32 #RTOS #FreeRTOS #Bluetooth #ThumbJoystick #Keyboard #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Joystick
A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. Joysticks are often used to control video games, and usually have one or more push-buttons whose state can also be read by the computer. A popular variation of the joystick used on modern video game consoles is the analog stick. Joysticks are also used for controlling machines such as cranes, trucks, underwater unmanned vehicles, wheelchairs, surveillance cameras, and zero turning radius lawn mowers. This is a joystick very similar to the analog joysticks on PS2 controllers. Directional movements are simply two potentiometers, one for each axis. Pots are 10k Ohm each. This joystick also has a select button that is actuated when the joystick is pressed down.
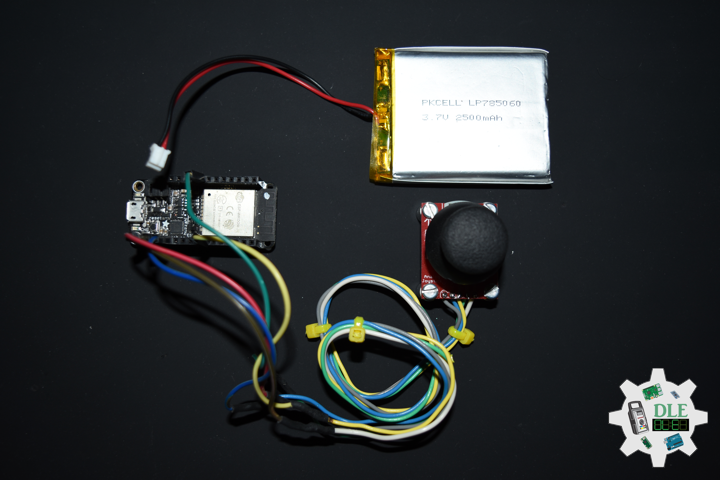
DL2210Mk04
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x SparkFun Cerberus USB Cable
ESP32 Feather
JY0 – Analog A0
JY1 – Analog A5
SE0 – Digital 12
LED – Digital 13
VIN – +3.3V
GND – GND
——
DL2210Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #24 - RTOS - Bluetooth - Mk03
24-03
DL2210Mk04p.ino
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x Lithium Ion Battery - 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// FreeRTOS ESP32
#if CONFIG_FREERTOS_UNICORE
#define ARDUINO_RUNNING_CORE 0
#else
#define ARDUINO_RUNNING_CORE 1
#endif
// ESP32 BLE Keyboard
#include <BleKeyboard.h>
// ESP32 BLE Keyboard
BleKeyboard bleKeyboard;
// Connections to joystick
// Vertical
const int VERT = A0;
// Horizontal
const int HORIZ = A5;
// Pushbutton
const int SEL = 12;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int selec;
// Led Built In
#ifndef LED_BUILTIN
#define LED_BUILTIN 13
#endif
// Define two tasks for Blink
void isTaskBlink( void *pvParameters );
// Software Version Information
String sver = "24-03";
void loop() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Thumb Joystick
isThumbJoystick();
}
// Delay
delay( 1000 );
}
getTasks.ino
// Tasks
// Setup Task
void isSetupTask(){
// Now set up two tasks to run independently
// TaskBlink
xTaskCreatePinnedToCore(
isTaskBlink
, "TaskBlink" // A name just for humans
, 1024 // This stack size can be checked & adjusted by reading.
, NULL
, 2 // Priority, with 2 being the highest, and 0 being the lowest.
, NULL
, ARDUINO_RUNNING_CORE);
// Now the task scheduler, which takes over control of scheduling individual tasks,
// is automatically started.
}
// This is a Task Blink
void isTaskBlink(void *pvParameters)
{
(void) pvParameters;
// Blink
// Turns on an LED on for 2 second, then off for 2 second, repeatedly
// Initialize digital LED_BUILTIN on pin 13 as an output.
pinMode(LED_BUILTIN, OUTPUT);
// A Task shall never return or exit
for (;;)
{
// Turn the LED on (HIGH is the voltage level)
digitalWrite(LED_BUILTIN, HIGH);
// One tick delay in between reads
vTaskDelay(2000);
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// One tick delay in between reads
vTaskDelay(2000);
}
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 2047 for the vertical and horizontal values
// Will be 0-4095
// Vertical
vertical = analogRead(VERT);
if (vertical == 4095) {
// Volume Up
bleKeyboard.write(KEY_MEDIA_VOLUME_UP);
} else if (vertical == 0) {
// Volume Down
bleKeyboard.write(KEY_MEDIA_VOLUME_DOWN);
}
// Horizontal
// Will be 0-4095
horizontal = analogRead(HORIZ);
if (horizontal == 4095) {
// Previous Track
bleKeyboard.write(KEY_MEDIA_PREVIOUS_TRACK);
} else if (horizontal == 0) {
// Next Track
bleKeyboard.write(KEY_MEDIA_NEXT_TRACK);
}
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
selec = digitalRead(SEL);
if (selec == 0) {
// Play/Pause media key
bleKeyboard.write(KEY_MEDIA_PLAY_PAUSE);
}
}
setup.ino
// Setup
void setup() {
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// ESP32 BLE Keyboard
bleKeyboard.begin();
// Setup Task
isSetupTask();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
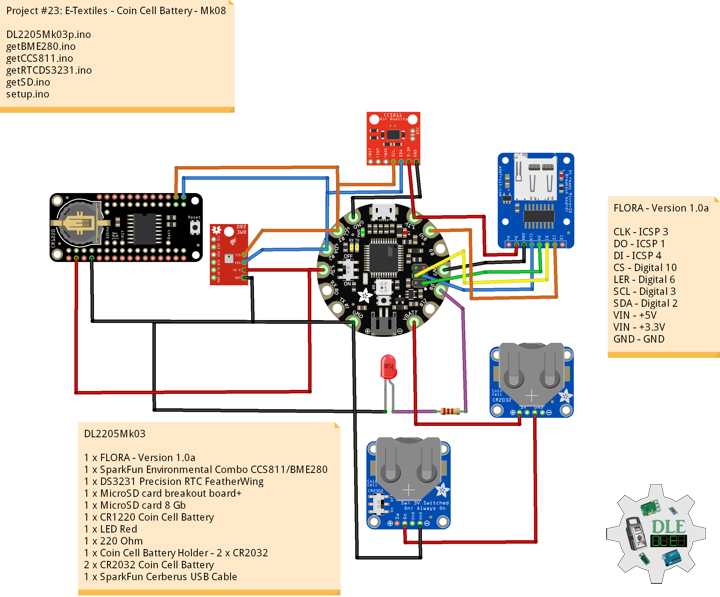
Project #23: E-Textiles – Coin Cell Battery – Mk08
——
#DonLucElectronics #DonLuc #ETextiles #Wearable #FLORA #BME280 #CCS811 #CoinCell #RTC #SD #Arduino #Project #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Coin Cell Battery Holder – 2 x CR2032 (Enclosed)
This is a simple coin cell battery holder that can enclose two CR2032 batteries inside itself, and safely kept closed via two phillips head screws. Each battery holder will run batteries in series, output up to 6V, and is equipped with an On/Off slide switch and two 6″ power wires (one positive and one negative) on the back.
DL2205Mk03
1 x FLORA – Version 1.0a
1 x SparkFun Environmental Combo CCS811/BME280
1 x DS3231 Precision RTC FeatherWing
1 x MicroSD card breakout board+
1 x MicroSD card 8 Gb
1 x CR1220 Coin Cell Battery
1 x LED Red
1 x 220 Ohm
1 x Coin Cell Battery Holder – 2 x CR2032
2 x CR2032 Coin Cell Battery
1 x SparkFun Cerberus USB Cable
FLORA – Version 1.0a
CLK – ICSP 3
DO – ICSP 1
DI – ICSP 4
CS – Digital 10
LER – Digital 6
SCL – Digital 3
SDA – Digital 2
VIN – +5V
VIN – +3.3V
GND – GND
——
DL2205Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #23: E-Textiles - Coin Cell Battery - Mk08
23-08
DL2205Mk03p.ino
1 x FLORA - Version 1.0a
1 x SparkFun Environmental Combo CCS811/BME280
1 x DS3231 Precision RTC FeatherWing
1 x MicroSD card breakout board+
1 x MicroSD card 8 Gb
1 x CR1220 Coin Cell Battery
1 x LED Red
1 x 220 Ohm
1 x Coin Cell Battery Holder - 2 x CR2032
2 x CR2032 Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire
#include <Wire.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Date and time DS3231 RTC
#include <RTClib.h>
// Serial Peripheral Interface (SPI)
#include <SPI.h>
// Secure Digital (SD Card)
#include <SD.h>
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
String sDate;
String sTime;
// Secure Digital (SD Card)
const int chipSelect = 10;
String zzzzzz = "";
// LED Red
const int iLEDR = 6;
// Software Version Information
String sver = "23-08";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Dates and Time
timeRTC();
// MicroSD Card
isSD();
// 1 Seconds
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity() ;
// Altitude Meters
BMEaltitudeM = myBME280.readFloatAltitudeMeters();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin()) {
while (1);
}
DateTime now = RTC.now();
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2022, 4, 26, 11, 39, 0));
}
}
// timeRTC
void timeRTC() {
// DS3231 Precision RTC
sDate = "";
sTime = "";
// Date Time
DateTime now = RTC.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
// See if the card is present and can be initialized:
if (!SD.begin(chipSelect)) {
// Don't do anything more:
while (1);
}
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// Version|Date|Time|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure
//|eCO2 Concentration|tVOC Concentration|
zzzzzz = sver + "|" + sDate + "|" + sTime + "|"
+ BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|"
+ CCS811CO2 + "|" + CCS811TVOC + "|";
// Open the file. Note that only one file can be open at a time,
// so you have to close this one before opening another.
File dataFile = SD.open("DLE22Log.txt", FILE_WRITE);
// If the file is available, write to it:
if (dataFile) {
// Write
dataFile.println( zzzzzz );
dataFile.close();
}
}
setup.ino
// Setup
void setup() {
// Delay
delay( 100 );
// Set up I2C bus
Wire.begin();
// Delay
delay( 50 );
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// LED Red
pinMode( iLEDR , OUTPUT);
// Turn the LED Red on HIGH
digitalWrite( iLEDR , HIGH);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #22: Synthesizer – The AcceleroSynth 2012 – Mk01
——
#DonLucElectronics #DonLuc #Synthesizer #Programming #Electronics #Microcontrollers #Consultant
——
——
Synthesizer, Music Synthesizer Or Electronic Sound Synthesizer
Synthesizer machine that electronically generates and modifies sounds, frequently with the use of a digital computer. Synthesizers are used for the composition of electronic music and in live performance. Synthesizers are typically played with keyboards or controlled by sequencers, software or other instruments. A electronic musical instrument that generates audio signals. Synthesizers typically create sounds by generating waveforms, through methods including subtractive synthesis, additive synthesis and frequency modulation synthesis. These sounds may be altered by components such as filters, which cut or boost frequencies, envelopes, which control articulation, or how notes begin and end, and low-frequency oscillators, which modulate parameters such as pitch, volume, or filter characteristics affecting timbre.
The AcceleroSynth – 2012
We are finally ready for our first electronics project, The AcceleroSynth. It is an microcontroller-based (Arduino) music synth that is controller by a 3 axis analog accelerometer. It will be both a hardware and a software synth. This is the announcement for the project and in the coming days I will post the BOM (Bill of Material), schematics and Arduino code with the first assembly video. The project will first be assembled on a protoboard, then a soldered version will be built either on a perfboard or on an Arduino ProtoShield. If there is enough demand either a PCB or an Arduino Shield will be built for the project and sold here. More on that later. The first installment on the building of the project should be up on a few days.
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
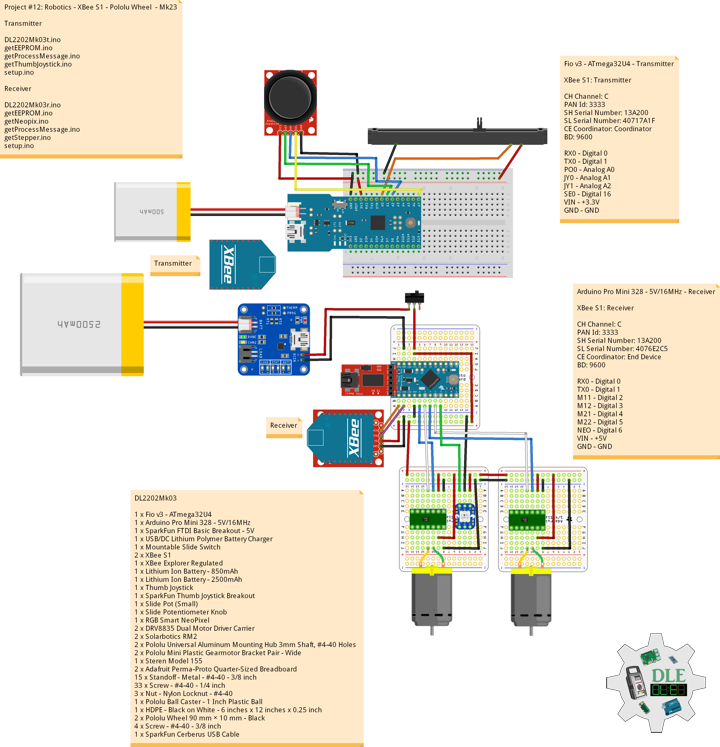
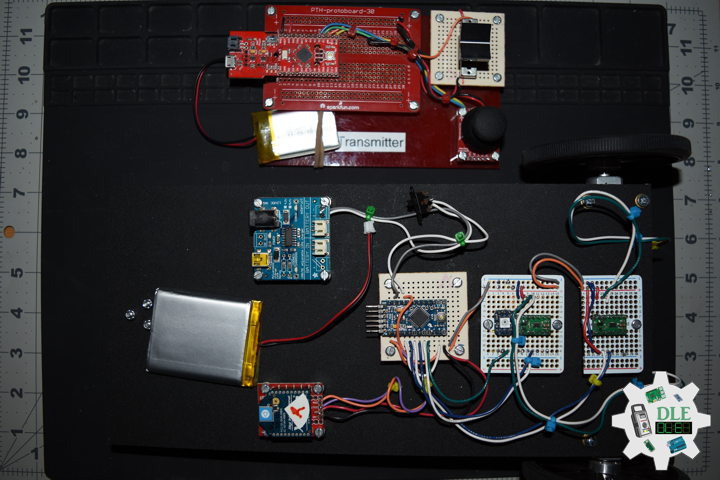
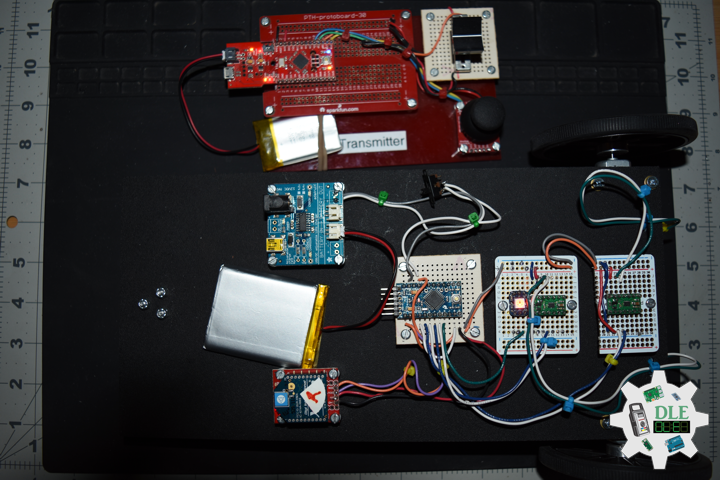
Project #12: Robotics – Pololu Wheel – Mk23
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Pololu Wheel 90 mm × 10 mm – Black
These black plastic wheels have silicone tires and measure 90 mm (3.54 inches) in diameter, and they press-fit onto the 3mm D shafts on many of our motors, including our micro metal gearmotors and our mini plastic gearmotors. Additionally, this wheel is compatible with several of our universal mounting hubs, which can serve as adapters for motors with different shafts. Six mounting holes for #4 or M3 screws make it possible to use the wheel with any of our universal mounting hubs for those screw sizes, enabling these wheels to be used with our larger metal gearmotors and stepper motors. The included silicone tires, which feature horizontal treads for improved traction.
DL2202Mk03
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm – Black
4 x Screw – #4-40 – 3/8 inch
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk03t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Transmitter
DL2202Mk03t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-23t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk03r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Receiver
DL2202Mk03r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm - Black
4 x Screw - #4-40 - 3/8 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-23r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 80, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Backward
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Forward
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Pololu Ball Caster – Mk22
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
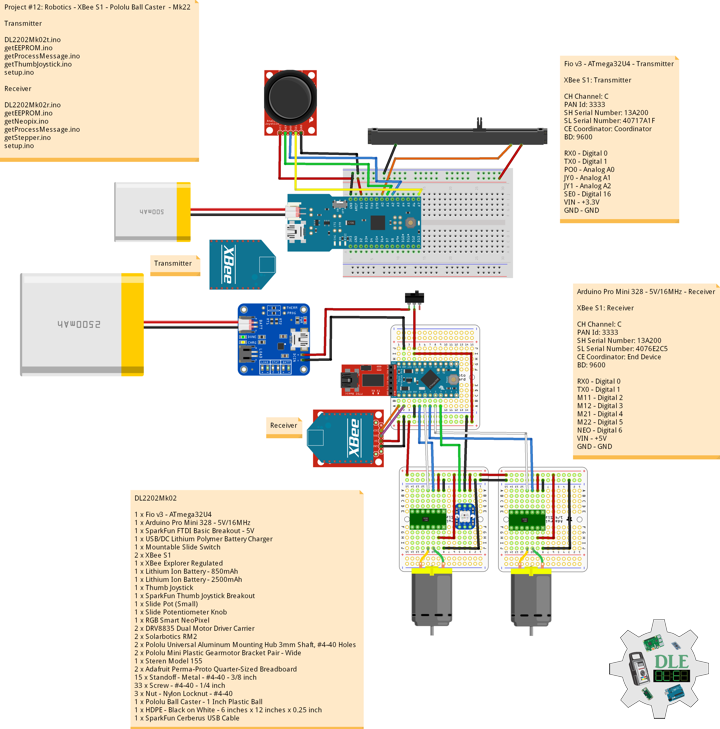
——
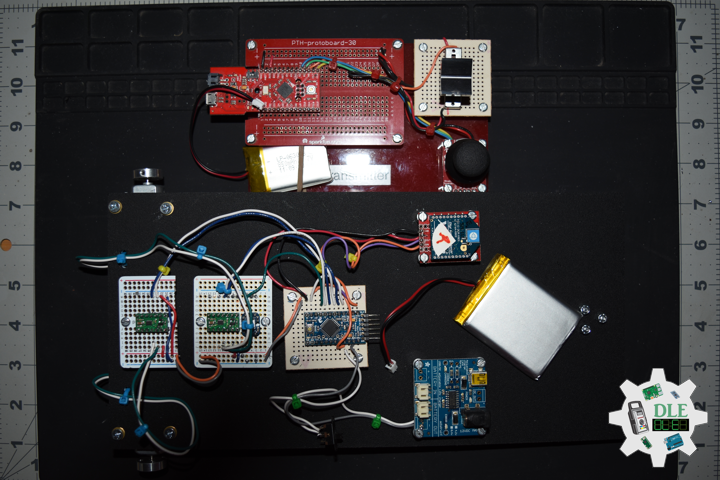
——
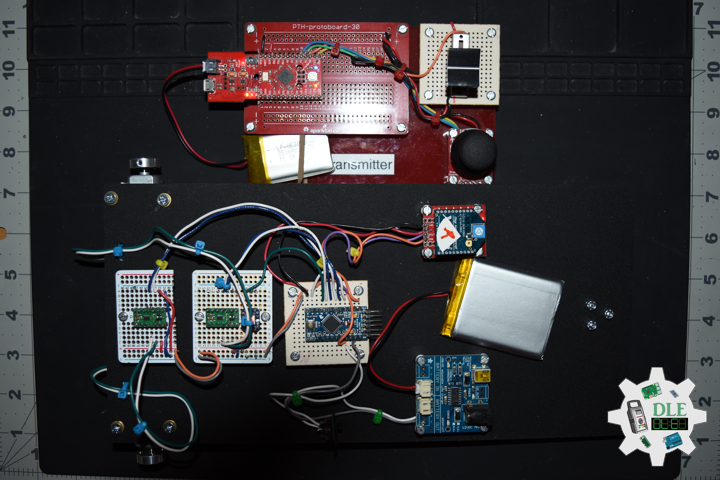
——
Pololu Ball Caster with 1 Inch Plastic Ball and Ball Bearings
This ball caster uses a 1 inch diameter plastic ball and has an overall height of 1.1 inches (29 mm). The two-part housing snaps together to securely enclose the ball and three ball bearings that minimize friction between the ball and the ABS housing.
This ball caster kit includes a two-part black ABS housing, a 1 inch diameter POM plastic ball, three 3 mm × 7 mm × 3 mm ball bearings, and three dowel pins used to hold the ball bearings. When assembled, the ball caster is capable of rolling in any direction with low friction, making it suitable for use as a third contact point for wheeled, differential-drive robots weighing up to around ten pounds.
The base piece of the housing has holes for three mounting screws and slots for ball bearings. The second part of the housing snaps into the base piece to secure the ball and ball bearings. The assembled ball caster has an overall height of 1.1 inches (29 mm).
DL2202Mk02
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2202Mk02t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Ball Caster - Mk22
02-02
Transmitter
DL2202Mk02t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-22t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk02r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Ball Caster - Mk22
02-02
Receiver
DL2202Mk02r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-22r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Steren 155 – Mk21
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
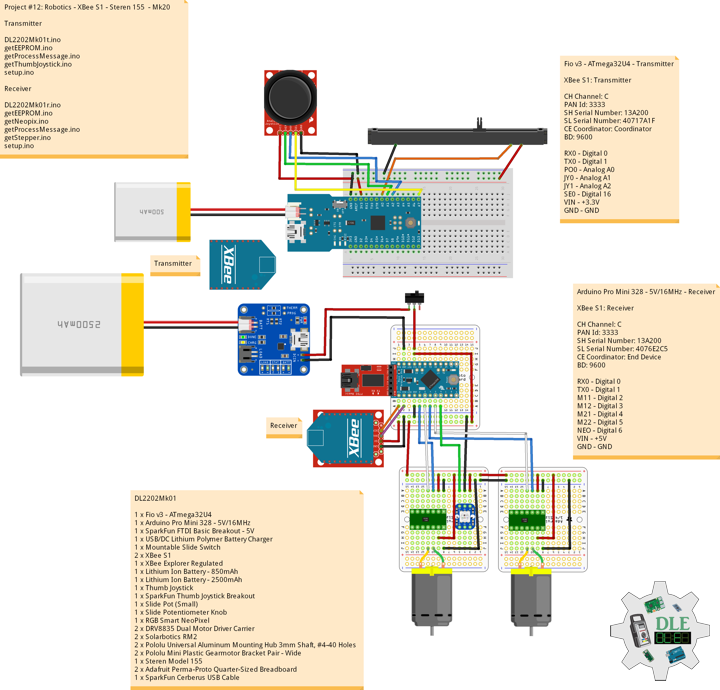
——
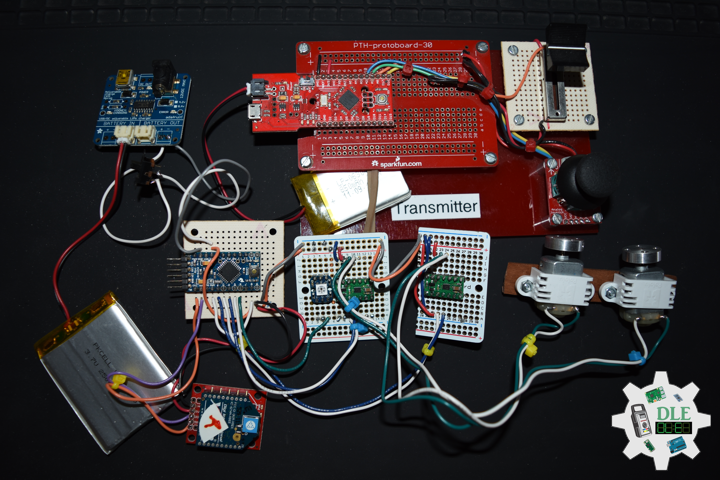
——
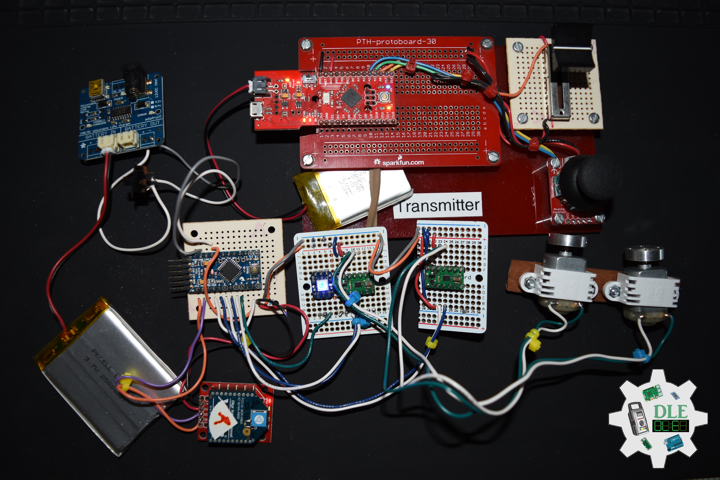
——
Perforated Phenolic Plate
So you finish your electronics projects, such as printed circuits. We know that designing a prototype or electronic project can be a complicated task if you do not have the necessary items to carry it out, so with us you it a phenolic plates of a face, two sided or perforated, ferric chloride, auto-adherable tracks, leaves thermal transfer or permanent ink markers so that your circuits are perfect.
Steren Model 155
Bakelite phenolic plate with copper, 4.5 cm x 4.5 cm, engraved and perforated with 164 orifices for components and 4 for fixing the plate. Ideal for projects or prototypes.
DL2202Mk01
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk01t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Steren 155 - Mk21
02-01
Transmitter
DL2202Mk01t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-21t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk01r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Steren 155 - Mk21
02-01
Receiver
DL2202Mk01r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-21r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc