Project #27 – Instructor – Microcontroller – Mk02
——
#DonLucElectronics #DonLuc #Instructor #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
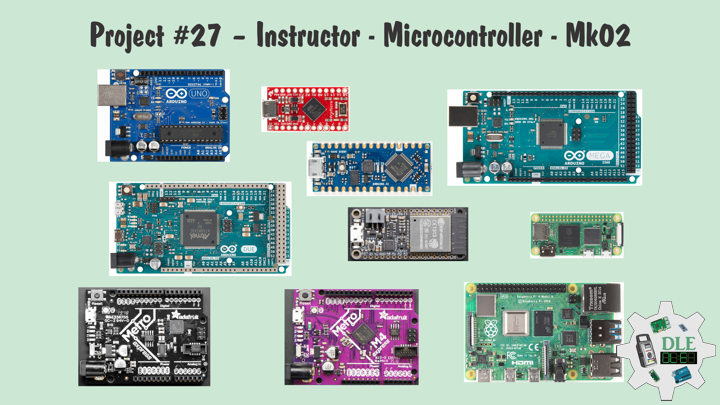
Microcontroller
A microcontroller is a small computer on a single Metal-Oxide-Semiconductor (MOS) integrated circuit (IC) chip. A microcontroller contains one or more CPUs (Processor Cores) along with memory and programmable input/output peripherals. Program memory in the form of ferroelectric RAM, NOR flash or OTP ROM is also often included on chip, as well as a small amount of RAM. Microcontrollers are designed for embedded applications, in contrast to the microprocessors used in personal computers or other general purpose applications consisting of various discrete chips.
A microcontroller is a “Simple Computer” that runs one program in a loop. They are designed to perform a single, specific task. In this guide, we’ll be focusing on microcontrollers that have breakout boards, or a board that makes it easier to connect to and program the microcontroller. On a breakout board, the microcontroller pins are soldered to a printed circuit board, headers or other connectors are added to the PCB, and some basic firmware, or permanent software, is loaded to prep the microcontroller to receive signals.
There are different microcontrollers and it can be daunting to get started, especially if you’re just getting into electronics.
- Arduino Uno, etc, (5V/16MHz, 3.3V/8MHz) is a microcontroller board based on the ATmega328.
- Arduino Micro, etc, (5V/16MHz, 3.3V/8MHz) is a microcontroller board based on the ATmega32U4.
- Arduino Mega 2560, etc, (5V/16MHz) is a microcontroller board based on the ATmega2560.
- Arduino Due, etc, (3.3V/84MHz) is a microcontroller board based on the AT91SAM3X8E.
- Arduino Zero, etc, (3.3V/48MHz) is a microcontroller board based on the ATSAMD21G18 ARM Cortex M0+.
- Arduino Nano 33, etc, (3.3V/120MHz) is a microcontroller board based on the ATSAMD51 Cortex M4.
- Espressif ESP32 WROOM, etc, (3.3V/240MHz) is a microcontroller board based on the Espressif Xtensa® dual-core 32-bit LX6.
- Raspberry Pi 4 Model B (5.1V/1.5GHz) is a microcontroller board based on the Broadcom BCM2711, quad-core Cortex-A72 (ARM v8) 64-bit SoC.
- Raspberry Pi Zero W (5.1V/1GHz) is a microcontroller board based on the Broadcom BCM2837B0 64-bit ARM Cortex-A53 Quad Core Processor SoC.
- Etc…
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
#27 – Instructor – Instructor, E-Mentor, STEAM, and Arts-Based Training – Mk01
——
#DonLucElectronics #DonLuc #Instructor #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
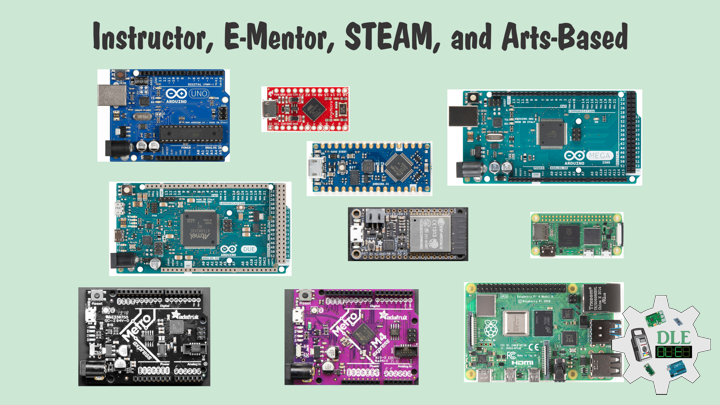
Instructor, E-Mentor, STEAM, and Arts-Based Training
What do remote controllers, routers, and robots all have in common? These beginner-friendly microcontrollers are easy to use and program with just a computers or laptop, a USB cable, and some open-source software. All the projects, here we come. Whether you are looking to build some cool electronic projects, learn programming, or wanting to teach others about electronics, this a teaching session will help you figure out what microcontroller is right for your needs, goals, and budgets. Here is some helpful content to start you on your electronics journey. There are different microcontrollers and it can be daunting to get started, especially if you’re just getting into electronics.
- Arduino Uno, etc, is a microcontroller board based on the ATmega328 (5V/16MHz, 3.3V/8MHz).
- Arduino Micro, etc, is a microcontroller board based on the ATmega32U4 (5V/16MHz, 3.3V/8MHz).
- Arduino Mega 2560, etc, is a microcontroller board based on the ATmega2560 (5V/16MHz).
- Arduino Due, etc, is a microcontroller board based on the AT91SAM3X8E (3.3V/84MHz).
- Arduino Zero, etc, is a microcontroller board based on the ATSAMD21G18 ARM Cortex M0+ (3.3V/48MHz).
- Arduino Nano 33, etc, is a microcontroller board based on the ATSAMD51 Cortex M4 (3.3V/120MHz).
- Espressif ESP32 WROOM, etc, is a microcontroller board based on the Espressif Xtensa® dual-core 32-bit LX6 (3.3V/240MHz).
- Raspberry Pi 4 Model B is a microcontroller board based on the Broadcom BCM2711, quad-core Cortex-A72 (ARM v8) 64-bit SoC (5.1V/1.5GHz).
- Raspberry Pi Zero W is a microcontroller board based on the Broadcom BCM2837B0 64-bit ARM Cortex-A53 Quad Core Processor SoC (5.1V/1GHz).
- Etc…
At Don Luc Electronics I believe that an understanding of electronics is a core literacy that opens up a world of opportunities in the fields of robotics, Internet of Things (IoT), machine learning, engineering, fashion, medical industries, environmental sciences, performing arts and more. This guide is designed to explore the connection between software and hardware, introducing code and parts as they are used in the context of building engaging projects. The circuits in this guide progress in difficulty as new concepts and components are introduced. Completing each circuit means much more than just experimenting you will walk away with a fun project you can use and a sense of accomplishment that is just the beginning of your electronics journey. At the end of each circuit, you’ll find coding challenges that extend your learning and fuel ongoing innovation.
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
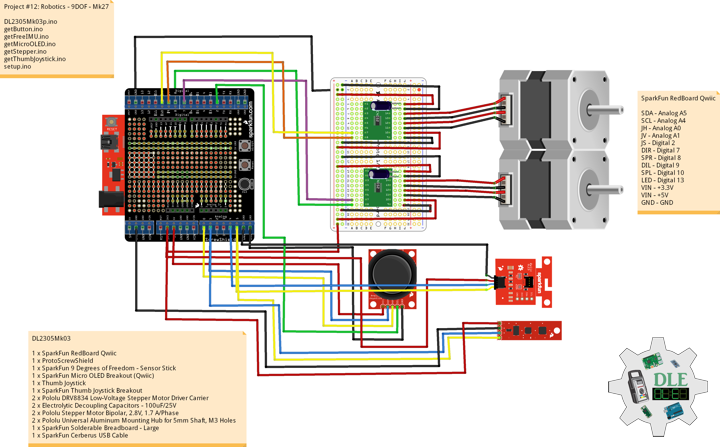
Project #12: Robotics – 9DOF – Mk27
——
#DonLucElectronics #DonLuc #Robotics #Magnetometer #Accelerometer #Gyroscope #MicroOLED # #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
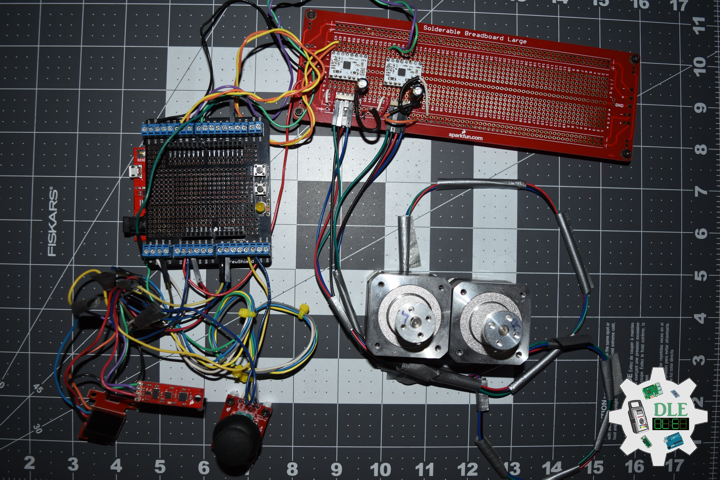
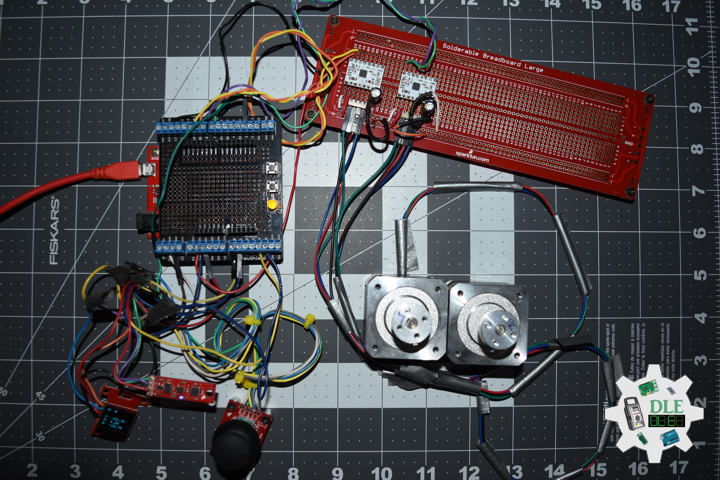
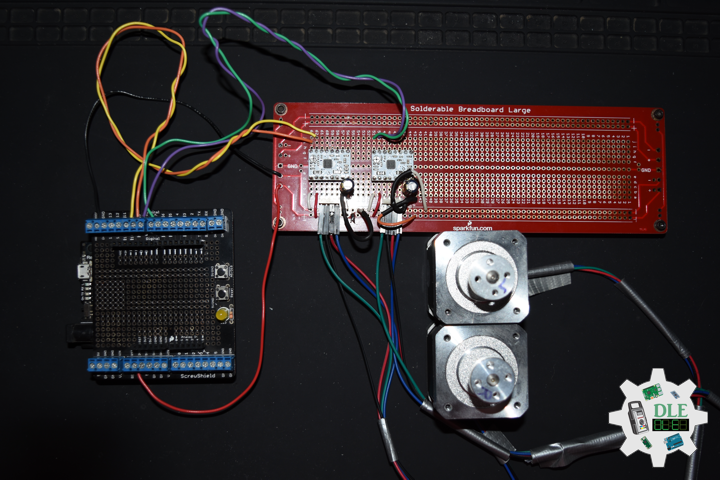
SparkFun 9 Degrees of Freedom – Sensor Stick
The SparkFun 9DOF Sensor Stick is a very small sensor board with 9 degrees of freedom. It includes the ADXL345 accelerometer, the HMC5883L magnetometer, and the ITG-3200 MEMS gyro. The “Stick” has a simple I2C interface and a mounting hole for attaching it to your project. Also, the board is a mere allowing it to be easily mounted in just about any application.
DL2305Mk03
1 x SparkFun RedBoard Qwiic
1 x ProtoScrewShield
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors – 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard – Large
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A5
SCL – Analog A4
JH – Analog A0
JV – Analog A1
JS – Digital 2
DIR – Digital 7
SPR – Digital 8
DIL – Digital 9
SPL – Digital 10
LED – Digital 13
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2305Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - 9DOF - Mk27
12-27
DL2305Mk03p.ino
1 x SparkFun RedBoard Qwiic
1 x ProtoScrewShield
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors - 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard - Large
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// DRV8834 Stepper Motor Driver
#include <BasicStepperDriver.h>
#include <MultiDriver.h>
// Wire communicate with I2C / TWI devices
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// DRV8834 Stepper Motor Driver
// Stepper motor steps per revolution.
// Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// Target RPM for X axis stepper motor
#define MOTOR_X_RPM 800
// Target RPM for Y axis stepper motor
#define MOTOR_Y_RPM 800
// Since microstepping is set externally,
// make sure this matches the selected mode
// If it doesn't, the motor will move at a
// different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// X Stepper motor
#define DIR_X 7
#define STEP_X 8
// Y Stepper motor
#define DIR_Y 9
#define STEP_Y 10
// BasicStepperDriver
BasicStepperDriver stepperX(MOTOR_STEPS, DIR_X, STEP_X);
BasicStepperDriver stepperY(MOTOR_STEPS, DIR_Y, STEP_Y);
// Pick one of the two controllers below
// each motor moves independently
MultiDriver controller(stepperX, stepperY);
// Joystick
#define JH A0
#define JV A1
#define JS 2
// Variable for reading the button
int JSState = 0;
// Adjusted Value
int adjustedValue = 0;
int adjustedValue2 = 0;
// LED Yellow
int iLED = 13;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "12-27";
void loop() {
// Button
isButton();
// Joystick
isThumbJoystick();
// Stepper
isStepper();
// isFreeIMU
isFreeIMU();
// Micro OLED
isMicroOLED();
}
getButton.ino
// Button
// Button Setup
void isButtonSetup() {
// Make the button line an input
pinMode(JS, INPUT_PULLUP);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
}
// Button
void isButton(){
// Read the state of the button
JSState = digitalRead(JS);
// Check if the button is pressed.
// If it is, the JSState is HIGH:
if (JSState == HIGH) {
// Button
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
} else {
// Button
// Turn the LED on LOW
digitalWrite(iLED, LOW);
}
}
getFreeIMU.ino
// FreeIMU
// isFreeIMUSetup
void isFreeIMUSetup(){
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getMicroOLED.ino
// SparkFun Micro OLED
// Micro OLED Setup
void isMicroOLEDSetup() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (Splash Screen SparkFun)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Horizontal
oled.print("H: ");
oled.print( adjustedValue );
// Vertical
oled.setCursor(0, 11);
oled.print("V: ");
oled.print( adjustedValue2 );
// Yaw
oled.setCursor(0, 21);
oled.print("Y: ");
oled.print(Yaw);
// Pitch
oled.setCursor(0, 31);
oled.print("P: ");
oled.print(Pitch);
// Roll
oled.setCursor(0, 41);
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// Set stepper target motors RPM.
stepperX.begin(MOTOR_X_RPM, MICROSTEPS);
stepperY.begin(MOTOR_Y_RPM, MICROSTEPS);
}
// Stepper
void isStepper() {
// Stepper => Controller rotate
controller.rotate(adjustedValue, adjustedValue2);
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick JH
// Horizontal
// Joystick Pot Values JH
int potValue = analogRead(JH);
int potValues = 0;
// Adjusted Value
potValues = map(potValue, 0, 1023, 1000, -1000);
if (potValues > 300) {
adjustedValue = potValues;
} else if (potValues < -300) {
adjustedValue = potValues;
} else {
adjustedValue = 0;
}
// Joystick JV
// Vertical
// Joystick Pot Values JV
int potValue2 = analogRead(JV);
int potValues2 = 0;
// Adjusted Value2
potValues2 = map(potValue2, 0, 1023, 1000, -1000);
if (potValues2 > 300) {
adjustedValue2 = potValues2;
} else if (potValues2 < -300) {
adjustedValue2 = potValues2;
} else {
adjustedValue2 = 0;
}
}
setup.ino
// Setup
void setup()
{
// Wire communicate with I2C / TWI devices
Wire.begin();
// Setup Micro OLED
isMicroOLEDSetup();
// isFreeIMUSetup
isFreeIMUSetup();
// Button Setup
isButtonSetup();
// DRV8834 Stepper Motor Driver
isStepperSetup();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Micro OLED – Mk26
——
#DonLucElectronics #DonLuc #Robotics #MicroOLED #AdafruitMETROM0Express #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——-
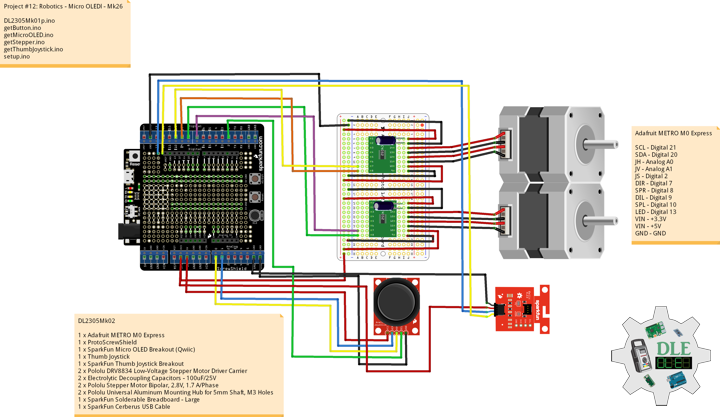
Micro OLED
Micro OLED displays are silicon-based OLED display that use a monocrystalline silicon wafer as the actively driven backplane, so it is easier to achieve high PPI (Pixel Density), a high degree of integration, and small size. This ensures they are easy to carry, have good anti-seismic performance, and have ultra-low power consumption.
DL2305Mk02
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors – 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard – Large
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
SCL – Digital 21
SDA – Digital 20
JH – Analog A0
JV – Analog A1
JS – Digital 2
DIR – Digital 7
SPR – Digital 8
DIL – Digital 9
SPL – Digital 10
LED – Digital 13
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2305Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Micro OLED - Mk26
12-26
DL2305Mk02p.ino
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors - 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard - Large
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// DRV8834 Stepper Motor Driver
#include <BasicStepperDriver.h>
#include <MultiDriver.h>
// Wire communicate with I2C / TWI devices
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// DRV8834 Stepper Motor Driver
// Stepper motor steps per revolution.
// Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// Target RPM for X axis stepper motor
#define MOTOR_X_RPM 800
// Target RPM for Y axis stepper motor
#define MOTOR_Y_RPM 800
// Since microstepping is set externally,
// make sure this matches the selected mode
// If it doesn't, the motor will move at a
// different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// X Stepper motor
#define DIR_X 7
#define STEP_X 8
// Y Stepper motor
#define DIR_Y 9
#define STEP_Y 10
// BasicStepperDriver
BasicStepperDriver stepperX(MOTOR_STEPS, DIR_X, STEP_X);
BasicStepperDriver stepperY(MOTOR_STEPS, DIR_Y, STEP_Y);
// Pick one of the two controllers below
// each motor moves independently
MultiDriver controller(stepperX, stepperY);
// Joystick
#define JH A0
#define JV A1
#define JS 2
// Variable for reading the button
int JSState = 0;
// Adjusted Value
int adjustedValue = 0;
int adjustedValue2 = 0;
// LED Yellow
int iLED = 13;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "12-26";
void loop() {
// Button
isButton();
// Joystick
isThumbJoystick();
// Stepper
isStepper();
// Micro OLED
isMicroOLED();
}
getButton.ino
// Button
// Button Setup
void isButtonSetup() {
// Make the button line an input
pinMode(JS, INPUT_PULLUP);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
}
// Button
void isButton(){
// Read the state of the button
JSState = digitalRead(JS);
// Check if the button is pressed.
// If it is, the JSState is HIGH:
if (JSState == HIGH) {
// Button
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
} else {
// Button
// Turn the LED on LOW
digitalWrite(iLED, LOW);
}
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isMicroOLEDSetup() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (Splash Screen SparkFun)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Horizontal
oled.print("Horizontal");
// Horizontal
oled.setCursor(0, 13);
oled.print( adjustedValue );
// Vertical
oled.setCursor(0, 24);
oled.print("Vertical");
// Vertical
oled.setCursor(0, 37);
oled.print( adjustedValue2 );
oled.display();
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// Set stepper target motors RPM.
stepperX.begin(MOTOR_X_RPM, MICROSTEPS);
stepperY.begin(MOTOR_Y_RPM, MICROSTEPS);
}
// Stepper
void isStepper() {
// Stepper => Controller rotate
controller.rotate(adjustedValue, adjustedValue2);
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick JH
// Horizontal
// Joystick Pot Values JH
int potValue = analogRead(JH);
int potValues = 0;
// Adjusted Value
potValues = map(potValue, 0, 1023, 1000, -1000);
if (potValues > 300) {
adjustedValue = potValues;
} else if (potValues < -300) {
adjustedValue = potValues;
} else {
adjustedValue = 0;
}
// Joystick JV
// Vertical
// Joystick Pot Values JV
int potValue2 = analogRead(JV);
int potValues2 = 0;
// Adjusted Value2
potValues2 = map(potValue2, 0, 1023, 1000, -1000);
if (potValues2 > 300) {
adjustedValue2 = potValues2;
} else if (potValues2 < -300) {
adjustedValue2 = potValues2;
} else {
adjustedValue2 = 0;
}
}
setup.ino
// Setup
void setup()
{
// Wire communicate with I2C / TWI devices
Wire.begin();
// Setup Micro OLED
isMicroOLEDSetup();
// Button Setup
isButtonSetup();
// DRV8834 Stepper Motor Driver
isStepperSetup();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
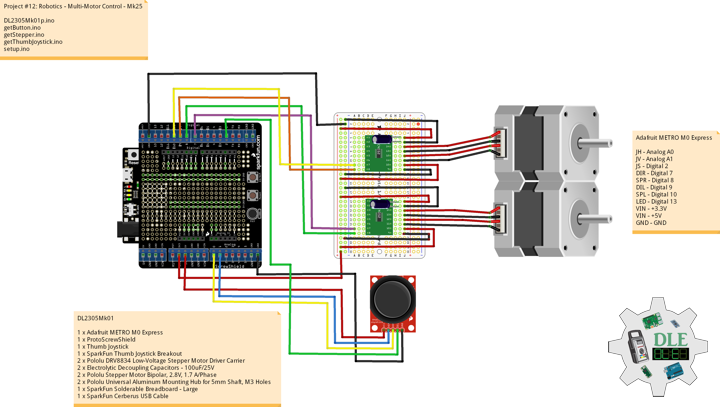
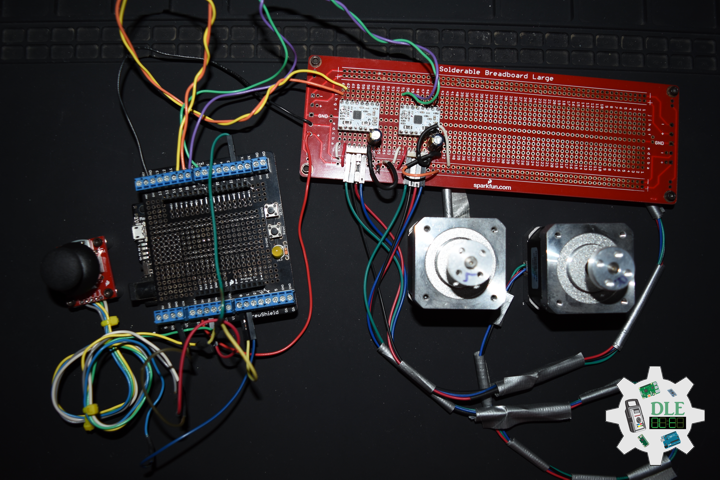
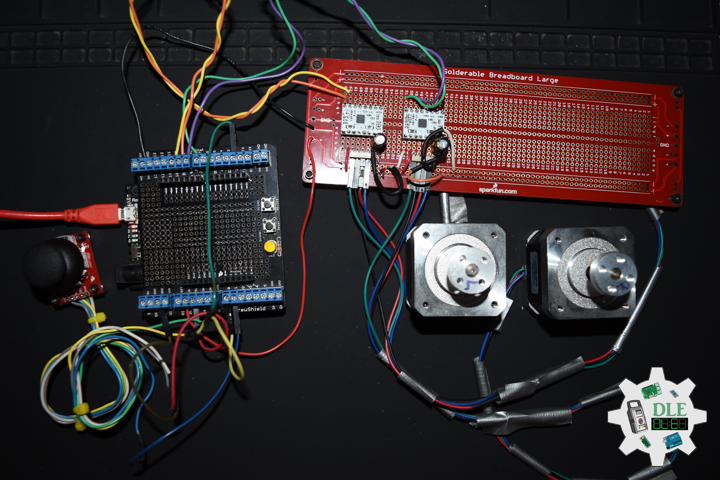
Project #12: Robotics – Multi-Motor Control – Mk25
——
#DonLucElectronics #DonLuc #Robotics #MultiMotorControl #AdafruitMETROM0Express #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
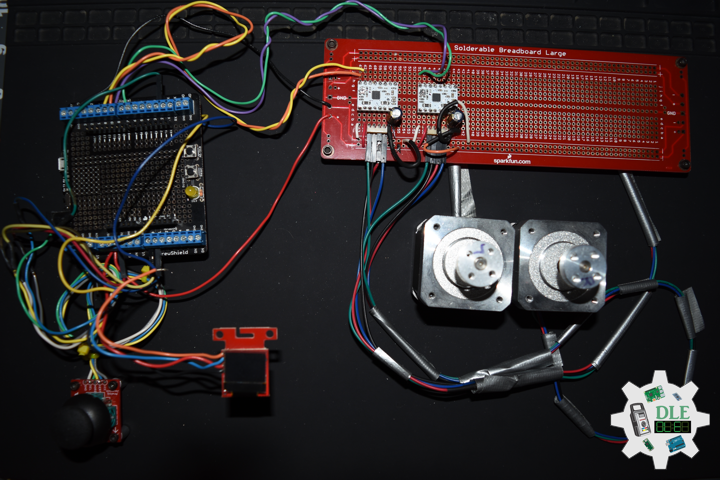
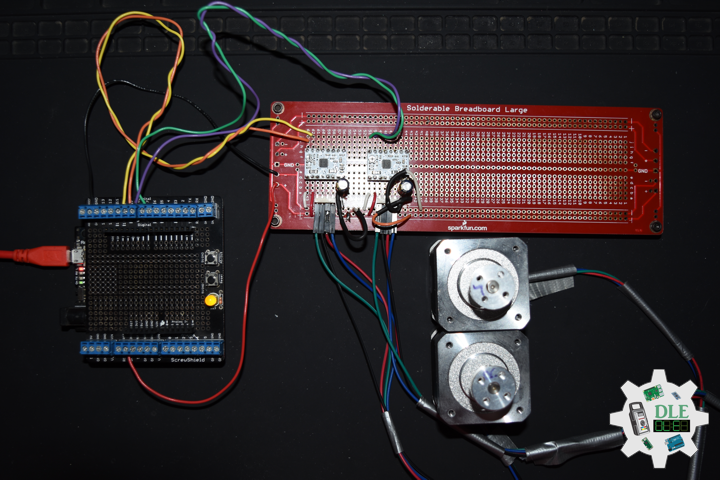
Multi-Motor Control
In order to synchronize the multi-motor system, a novel method for this system based on embedded control terminal. A controller of the strategy with the function of synchronous control is also completed. According to the requirements of this system, a distributed control structure which based on Hierarchical Approach is chosen. The hardware platform of this structure is composed of embedded control terminal motor could be driven independently. The experiment results verified that the multi-motor system is reliable, the control strategy is rational applied this multi-motor system has better dynamic response and higher reliability.
DL2305Mk01
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors – 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard – Large
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
JH – Analog A0
JV – Analog A1
JS – Digital 2
DIR – Digital 7
SPR – Digital 8
DIL – Digital 9
SPL – Digital 10
LED – Digital 13
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2305Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Multi-Motor Control - Mk25
12-25
DL2305Mk01p.ino
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors - 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard - Large
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// DRV8834 Stepper Motor Driver
#include <BasicStepperDriver.h>
#include <MultiDriver.h>
// DRV8834 Stepper Motor Driver
// Stepper motor steps per revolution.
// Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// Target RPM for X axis stepper motor
#define MOTOR_X_RPM 800
// Target RPM for Y axis stepper motor
#define MOTOR_Y_RPM 800
// Since microstepping is set externally,
// make sure this matches the selected mode
// If it doesn't, the motor will move at a
// different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// X Stepper motor
#define DIR_X 7
#define STEP_X 8
// Y Stepper motor
#define DIR_Y 9
#define STEP_Y 10
// BasicStepperDriver
BasicStepperDriver stepperX(MOTOR_STEPS, DIR_X, STEP_X);
BasicStepperDriver stepperY(MOTOR_STEPS, DIR_Y, STEP_Y);
// Pick one of the two controllers below
// each motor moves independently
MultiDriver controller(stepperX, stepperY);
// Joystick
#define JH A0
#define JV A1
#define JS 2
// Variable for reading the button
int JSState = 0;
// Adjusted Value
int adjustedValue = 0;
int adjustedValue2 = 0;
// LED Yellow
int iLED = 13;
// Software Version Information
String sver = "12-25";
void loop() {
// Button
isButton();
// Joystick
isThumbJoystick();
// Stepper
isStepper();
}
getButton.ino
// Button
// Button Setup
void isButtonSetup() {
// Make the button line an input
pinMode(JS, INPUT_PULLUP);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
}
// Button
void isButton(){
// Read the state of the button
JSState = digitalRead(JS);
// Check if the button is pressed.
// If it is, the JSState is HIGH:
if (JSState == HIGH) {
// Button
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
} else {
// Button
// Turn the LED on LOW
digitalWrite(iLED, LOW);
}
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// Set stepper target motors RPM.
stepperX.begin(MOTOR_X_RPM, MICROSTEPS);
stepperY.begin(MOTOR_Y_RPM, MICROSTEPS);
}
// Stepper
void isStepper() {
// Stepper => Controller rotate
controller.rotate(adjustedValue, adjustedValue2);
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick JH
// Horizontal
// Joystick Pot Values JH
int potValue = analogRead(JH);
int potValues = 0;
// Adjusted Value
potValues = map(potValue, 0, 1023, 1000, -1000);
if (potValues > 300) {
adjustedValue = potValues;
} else if (potValues < -300) {
adjustedValue = potValues;
} else {
adjustedValue = 0;
}
// Joystick JV
// Vertical
// Joystick Pot Values JV
int potValue2 = analogRead(JV);
int potValues2 = 0;
// Adjusted Value2
potValues2 = map(potValue2, 0, 1023, 1000, -1000);
if (potValues2 > 300) {
adjustedValue2 = potValues2;
} else if (potValues2 < -300) {
adjustedValue2 = potValues2;
} else {
adjustedValue2 = 0;
}
}
setup.ino
// Setup
void setup()
{
// Button Setup
isButtonSetup();
// DRV8834 Stepper Motor Driver
isStepperSetup();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
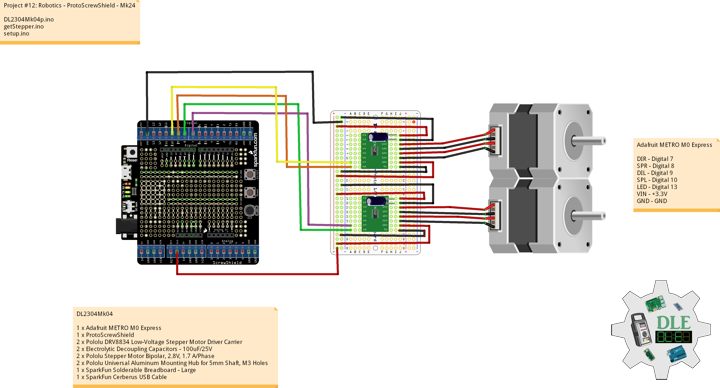
Project #12: Robotics – ProtoScrewShield – Mk24
——
#DonLucElectronics #DonLuc #Robotics #AdafruitMETROM0Express #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
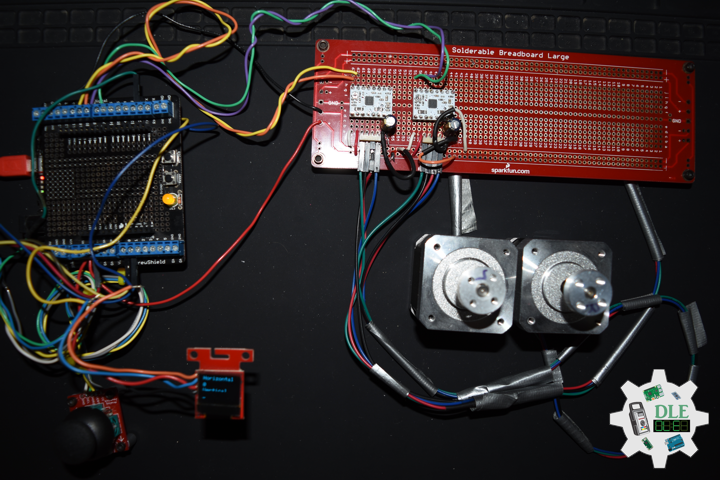
ProtoScrewShield
The ProtoScrewShield extends all pins of the Arduino out to 3.5mm pitch screw terminals. It also has a lot of the utility provided including: a large prototyping space of both connected and unconnected 0.1″ spaced through-holes, a couple 5V and GND busses, a reset button, general use push button, and a 5mm yellow LED. This product includes all the parts shown and comes in kit form and must be soldered together by the end user.
DL2304Mk04
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors – 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard – Large
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
DIR – Digital 7
SPR – Digital 8
DIL – Digital 9
SPL – Digital 10
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2304Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - ProtoScrewShield - Mk24
12-24
DL2304Mk04p.ino
1 x Adafruit METRO M0 Express
1 x ProtoScrewShield
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors - 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard - Large
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// DRV8834 Stepper Motor Driver
#include <BasicStepperDriver.h>
#include <MultiDriver.h>
// DRV8834 Stepper Motor Driver
// Stepper motor steps per revolution.
// Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// Target RPM for X axis stepper motor
#define MOTOR_X_RPM 800
// Target RPM for Y axis stepper motor
#define MOTOR_Y_RPM 800
// Since microstepping is set externally,
// make sure this matches the selected mode
// If it doesn't, the motor will move at a
// different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// X Stepper motor
#define DIR_X 7
#define STEP_X 8
// Y Stepper motor
#define DIR_Y 9
#define STEP_Y 10
// BasicStepperDriver
BasicStepperDriver stepperX(MOTOR_STEPS, DIR_X, STEP_X);
BasicStepperDriver stepperY(MOTOR_STEPS, DIR_Y, STEP_Y);
// Pick one of the two controllers below
// each motor moves independently
MultiDriver controller(stepperX, stepperY);
// LED Yellow
int iLED = 13;
// Software Version Information
String sver = "12-24";
void loop() {
// Stepper
isStepper();
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// Set stepper target motors RPM.
stepperX.begin(MOTOR_X_RPM, MICROSTEPS);
stepperY.begin(MOTOR_Y_RPM, MICROSTEPS);
}
// Stepper
void isStepper() {
// Stepper => Controller rotate
controller.rotate(360, 360);
}
setup.ino
// Setup
void setup()
{
// Initialize digital pin iLED as an output.
pinMode(iLED, OUTPUT);
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
// DRV8834 Stepper Motor Driver
isStepperSetup();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – 4×4 Offroad Race – Mk15
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Games #Gamepad #ESP32 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
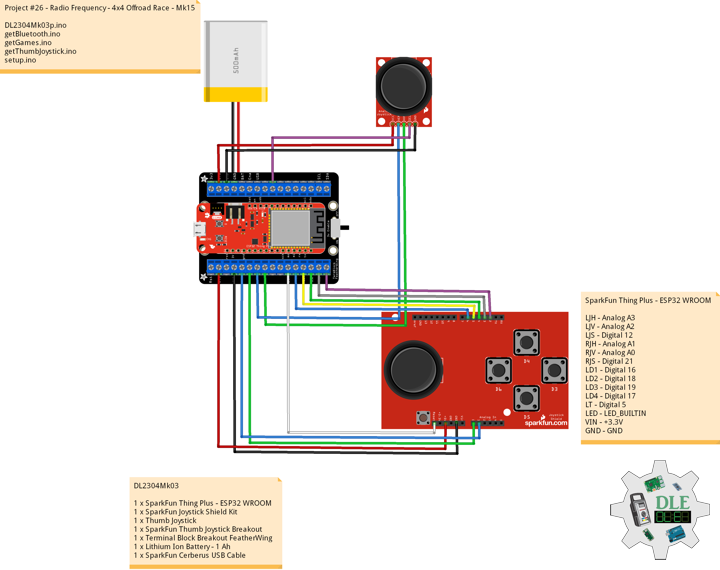
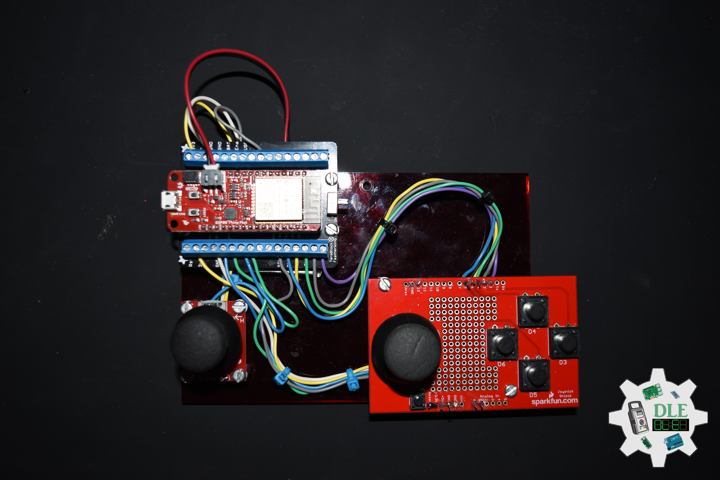
4×4 Offroad Race
3D off-road racing game. Powerful off-road vehicles, trails and routes running on dirt roads, extreme weather conditions and violent opponents, all that we call 4×4 Offroad Race. You will be able to experience the most powerful four-wheel drive vehicles. You have to overcome terrible roads, do jumps over bumps and potholes and knock opponents off the track to win all the races.
DL2304Mk03
1 x SparkFun Thing Plus – ESP32 WROOM
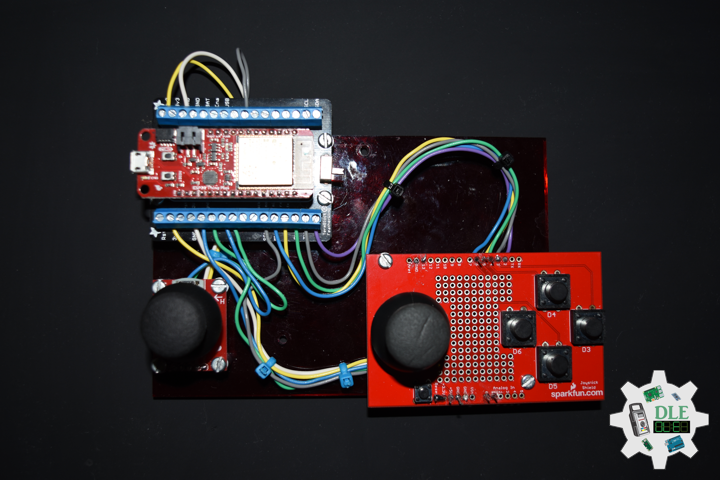
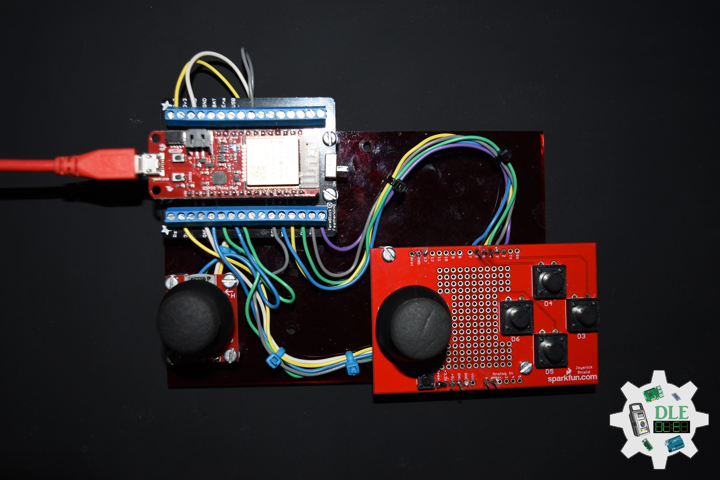
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LJH – Analog A3
LJV – Analog A2
LJS – Digital 12
RJH – Analog A1
RJV – Analog A0
RJS – Digital 21
LD1 – Digital 16
LD2 – Digital 18
LD3 – Digital 19
LD4 – Digital 17
LT – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2304Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - 4x4 Offroad Race - Mk15
26-15
DL2304Mk03p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// ESP32 BLE Gamepad
#include <BleGamepad.h>
// ESP32 BLE Gamepad
BleGamepad bleGamepad;
// Left Joystick
#define LJH A3
#define LJV A2
#define LJS 12
// Right Joystick
#define RJH A0
#define RJV A1
#define RJS 21
// D-pad
#define LD1 19
#define LD2 17
#define LD3 18
#define LD4 16
// LT
#define LT 5
// Previous Button State
int previousButton1State = HIGH;
int previousButton2State = HIGH;
int previousButton3State = HIGH;
int previousButton4State = HIGH;
int previousButton5State = HIGH;
int previousButton6State = HIGH;
int previousButton7State = HIGH;
// Number of pot samples to take (to smooth the values)
const int numberOfPotSamples = 5;
// Delay in milliseconds between pot samples
const int delayBetweenSamples = 2;
// Additional delay in milliseconds between HID reports
const int delayBetweenHIDReports = 5;
// Delay in milliseconds between button press
const int debounceDelay = 10;
// Software Version Information
String sver = "26-15";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Gamepad
if(bleGamepad.isConnected())
{
// Button
isButton();
// Joystick
isThumbJoystick();
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(LJS, INPUT_PULLUP);
pinMode(RJS, INPUT_PULLUP);
pinMode(LD1, INPUT_PULLUP);
pinMode(LD2, INPUT_PULLUP);
pinMode(LD3, INPUT_PULLUP);
pinMode(LD4, INPUT_PULLUP);
pinMode(LT, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Button
void isButton(){
// Button1 State LD1
int currentButton1State = digitalRead(LD1);
if (currentButton1State != previousButton1State)
{
if (currentButton1State == LOW)
{
bleGamepad.press(BUTTON_1);
}
else
{
bleGamepad.release(BUTTON_1);
}
}
previousButton1State = currentButton1State;
// Button2 State LD2
int currentButton2State = digitalRead(LD2);
if (currentButton2State != previousButton2State)
{
if (currentButton2State == LOW)
{
bleGamepad.press(BUTTON_2);
}
else
{
bleGamepad.release(BUTTON_2);
}
}
previousButton2State = currentButton2State;
// Button3 State LD3
int currentButton3State = digitalRead(LD3);
if (currentButton3State != previousButton3State)
{
if (currentButton3State == LOW)
{
bleGamepad.press(BUTTON_3);
}
else
{
bleGamepad.release(BUTTON_3);
}
}
previousButton3State = currentButton3State;
// Button4 State LD4
int currentButton4State = digitalRead(LD4);
if (currentButton4State != previousButton4State)
{
if (currentButton4State == LOW)
{
bleGamepad.press(BUTTON_4);
}
else
{
bleGamepad.release(BUTTON_4);
}
}
previousButton4State = currentButton4State;
// Button5 State LJS
int currentButton5State = digitalRead(LJS);
if (currentButton5State != previousButton5State)
{
if (currentButton5State == LOW)
{
bleGamepad.press(BUTTON_5);
}
else
{
bleGamepad.release(BUTTON_5);
}
}
previousButton5State = currentButton5State;
// Button6 State RJS
int currentButton6State = digitalRead(RJS);
if (currentButton6State != previousButton6State)
{
if (currentButton6State == LOW)
{
bleGamepad.press(BUTTON_6);
}
else
{
bleGamepad.release(BUTTON_6);
}
}
previousButton6State = currentButton6State;
// Button7 State LT
int currentButton7State = digitalRead(LT);
if (currentButton7State != previousButton7State)
{
if (currentButton7State == LOW)
{
bleGamepad.press(BUTTON_7);
}
else
{
bleGamepad.release(BUTTON_7);
}
}
previousButton7State = currentButton7State;
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick LJH
// Joystick Pot Values LJH
int potValues[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues[i] = analogRead(LJH);
delay(delayBetweenSamples);
}
int potValue = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue += potValues[i];
}
// Value / Pot Samples
potValue = potValue / numberOfPotSamples;
// Adjusted Value
int adjustedValue = map(potValue, 0, 4095, 32737, 0);
// Joystick LJV
// Joystick Pot Values LJV
int potValues2[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues2[i] = analogRead(LJV);
delay(delayBetweenSamples);
}
int potValue2 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue2 += potValues2[i];
}
// Value2 / Pot Samples
potValue2 = potValue2 / numberOfPotSamples;
// Adjusted Value2
int adjustedValue2 = map(potValue2, 0, 4095, 32737, 0);
// Joystick RJH
// Joystick Pot Values RJH
int potValues3[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues3[i] = analogRead(RJH);
delay(delayBetweenSamples);
}
int potValue3 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue3 += potValues3[i];
}
// Value3 / Pot Samples
potValue3 = potValue3 / numberOfPotSamples;
// Adjusted Value3
int adjustedValue3 = map(potValue3, 0, 4095, 32737, 0);
// Joystick RJV
// Joystick Pot Values RJV
int potValues4[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues4[i] = analogRead(RJV);
delay(delayBetweenSamples);
}
int potValue4 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue4 += potValues4[i];
}
// Value4 / Pot Samples
potValue4 = potValue4 / numberOfPotSamples;
// Adjusted Value4
int adjustedValue4 = map(potValue4, 0, 4095, 0, 32737);
//bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_CENTERED);
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_CENTERED);
delay(delayBetweenHIDReports);
// D-pad
// LD1
if (digitalRead(LD1) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_UP);
}
// LD2
if (digitalRead(LD2) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_LEFT);
}
// LD3
if (digitalRead(LD3) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_DOWN);
}
// LD4
if (digitalRead(LD4) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_RIGHT);
}
}
setup.ino
// Setup
void setup()
{
// Set Inputs
setInputs();
// ESP32 BLE Gamepad
bleGamepad.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
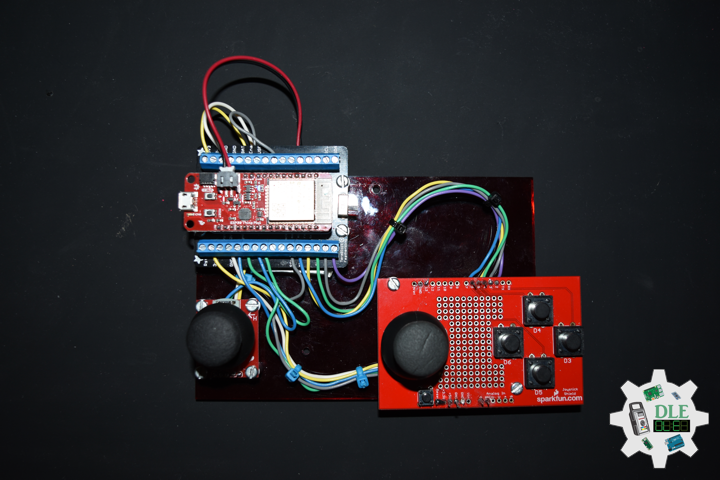
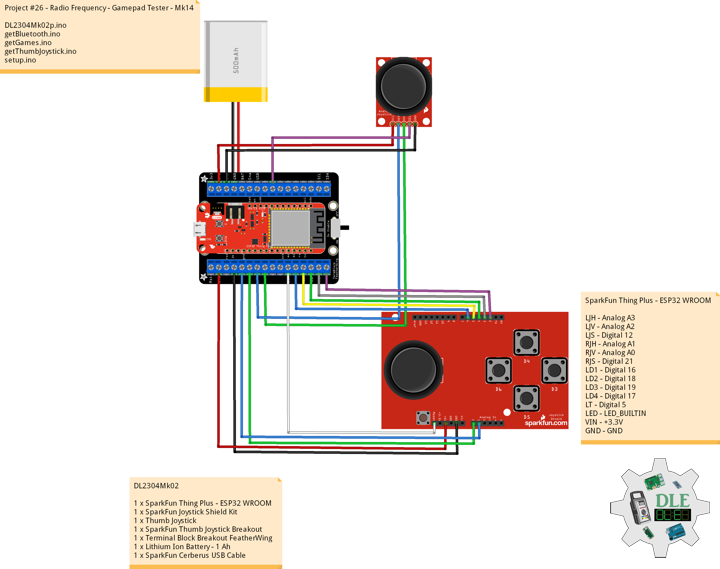
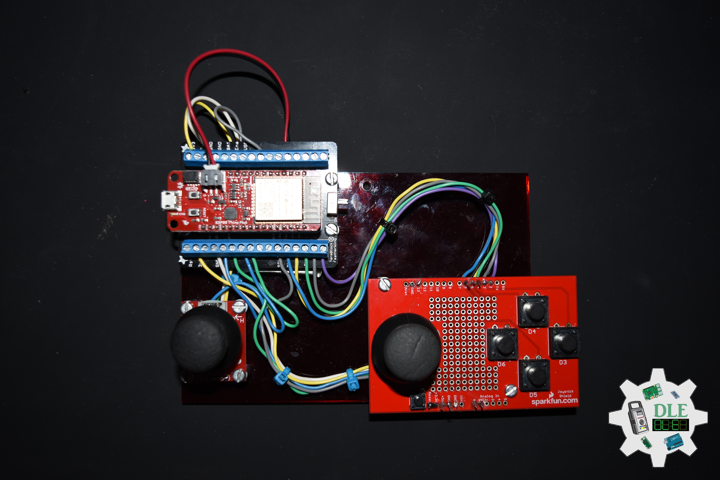
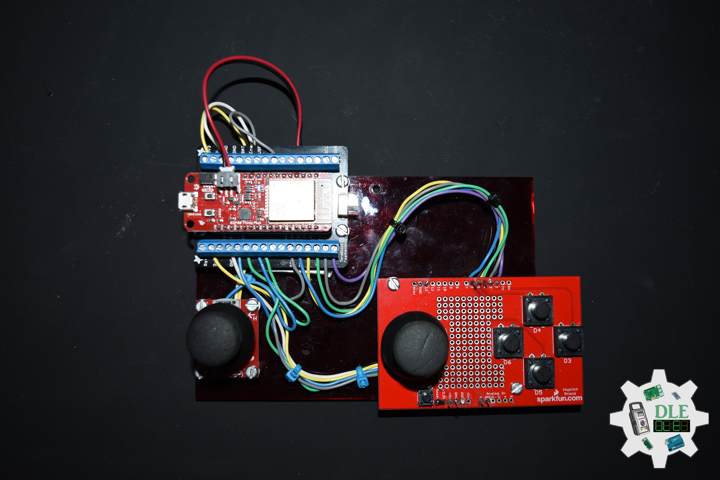
Project #26 – Radio Frequency – Gamepad Tester – Mk14
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #JoystickTest #Gamepad #ESP32 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Controller & Gamepad Tester
You can begin testing your controller or gamepad by pressing a button or moving one of the analog sticks on your gamepad. When you press a button or move an analog stick, the illustration above should light up or display the movement of your analog stick. When we detect movement or button presses, the “Controller Detected” message will show up with your controller’s name in it. If you have multiple controllers or gamepads connected, then please try them one by one. Even though the illustration represents an Xbox controller, the test also works with other similar controllers.
DL2304Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LJH – Analog A3
LJV – Analog A2
LJS – Digital 12
RJH – Analog A1
RJV – Analog A0
RJS – Digital 21
LD1 – Digital 16
LD2 – Digital 18
LD3 – Digital 19
LD4 – Digital 17
LT – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2304Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - - Mk14
26-14
DL2304Mk02p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// ESP32 BLE Gamepad
#include <BleGamepad.h>
// ESP32 BLE Gamepad
BleGamepad bleGamepad;
// Left Joystick
#define LJH A3
#define LJV A2
#define LJS 12
// Right Joystick
#define RJH A0
#define RJV A1
#define RJS 21
// D-pad
#define LD1 19
#define LD2 17
#define LD3 18
#define LD4 16
// LT
#define LT 5
// Previous Button State
int previousButton1State = HIGH;
int previousButton2State = HIGH;
int previousButton3State = HIGH;
int previousButton4State = HIGH;
int previousButton5State = HIGH;
int previousButton6State = HIGH;
int previousButton7State = HIGH;
// Number of pot samples to take (to smooth the values)
const int numberOfPotSamples = 5;
// Delay in milliseconds between pot samples
const int delayBetweenSamples = 2;
// Additional delay in milliseconds between HID reports
const int delayBetweenHIDReports = 5;
// Delay in milliseconds between button press
const int debounceDelay = 10;
// Software Version Information
String sver = "26-14";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Gamepad
if(bleGamepad.isConnected())
{
// Button
isButton();
// Joystick
isThumbJoystick();
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(LJS, INPUT_PULLUP);
pinMode(RJS, INPUT_PULLUP);
pinMode(LD1, INPUT_PULLUP);
pinMode(LD2, INPUT_PULLUP);
pinMode(LD3, INPUT_PULLUP);
pinMode(LD4, INPUT_PULLUP);
pinMode(LT, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Button
void isButton(){
// Button1 State LD1
int currentButton1State = digitalRead(LD1);
if (currentButton1State != previousButton1State)
{
if (currentButton1State == LOW)
{
bleGamepad.press(BUTTON_1);
}
else
{
bleGamepad.release(BUTTON_1);
}
}
previousButton1State = currentButton1State;
// Button2 State LD2
int currentButton2State = digitalRead(LD2);
if (currentButton2State != previousButton2State)
{
if (currentButton2State == LOW)
{
bleGamepad.press(BUTTON_2);
}
else
{
bleGamepad.release(BUTTON_2);
}
}
previousButton2State = currentButton2State;
// Button3 State LD3
int currentButton3State = digitalRead(LD3);
if (currentButton3State != previousButton3State)
{
if (currentButton3State == LOW)
{
bleGamepad.press(BUTTON_3);
}
else
{
bleGamepad.release(BUTTON_3);
}
}
previousButton3State = currentButton3State;
// Button4 State LD4
int currentButton4State = digitalRead(LD4);
if (currentButton4State != previousButton4State)
{
if (currentButton4State == LOW)
{
bleGamepad.press(BUTTON_4);
}
else
{
bleGamepad.release(BUTTON_4);
}
}
previousButton4State = currentButton4State;
// Button5 State LJS
int currentButton5State = digitalRead(LJS);
if (currentButton5State != previousButton5State)
{
if (currentButton5State == LOW)
{
bleGamepad.press(BUTTON_5);
}
else
{
bleGamepad.release(BUTTON_5);
}
}
previousButton5State = currentButton5State;
// Button6 State RJS
int currentButton6State = digitalRead(RJS);
if (currentButton6State != previousButton6State)
{
if (currentButton6State == LOW)
{
bleGamepad.press(BUTTON_6);
}
else
{
bleGamepad.release(BUTTON_6);
}
}
previousButton6State = currentButton6State;
// Button7 State LT
int currentButton7State = digitalRead(LT);
if (currentButton7State != previousButton7State)
{
if (currentButton7State == LOW)
{
bleGamepad.press(BUTTON_7);
}
else
{
bleGamepad.release(BUTTON_7);
}
}
previousButton7State = currentButton7State;
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick LJH
// Joystick Pot Values LJH
int potValues[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues[i] = analogRead(LJH);
delay(delayBetweenSamples);
}
int potValue = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue += potValues[i];
}
// Value / Pot Samples
potValue = potValue / numberOfPotSamples;
// Adjusted Value
int adjustedValue = map(potValue, 0, 4095, 32737, 0);
// Joystick LJV
// Joystick Pot Values LJV
int potValues2[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues2[i] = analogRead(LJV);
delay(delayBetweenSamples);
}
int potValue2 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue2 += potValues2[i];
}
// Value2 / Pot Samples
potValue2 = potValue2 / numberOfPotSamples;
// Adjusted Value2
int adjustedValue2 = map(potValue2, 0, 4095, 32737, 0);
// Joystick RJH
// Joystick Pot Values RJH
int potValues3[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues3[i] = analogRead(RJH);
delay(delayBetweenSamples);
}
int potValue3 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue3 += potValues3[i];
}
// Value3 / Pot Samples
potValue3 = potValue3 / numberOfPotSamples;
// Adjusted Value3
int adjustedValue3 = map(potValue3, 0, 4095, 32737, 0);
Serial.print(" RJH: ");
Serial.println(potValue3);
// Joystick RJV
// Joystick Pot Values RJV
int potValues4[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues4[i] = analogRead(RJV);
delay(delayBetweenSamples);
}
int potValue4 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue4 += potValues4[i];
}
// Value4 / Pot Samples
potValue4 = potValue4 / numberOfPotSamples;
// Adjusted Value4
int adjustedValue4 = map(potValue4, 0, 4095, 0, 32737);
Serial.print(" RJV: ");
Serial.println(potValue4);
//bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_CENTERED);
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_CENTERED);
delay(delayBetweenHIDReports);
// D-pad
// LD1
if (digitalRead(LD1) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_UP);
}
// LD2
if (digitalRead(LD2) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_LEFT);
}
// LD3
if (digitalRead(LD3) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_DOWN);
}
// LD4
if (digitalRead(LD4) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_RIGHT);
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(115200);
// Set Inputs
setInputs();
// ESP32 BLE Gamepad
bleGamepad.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
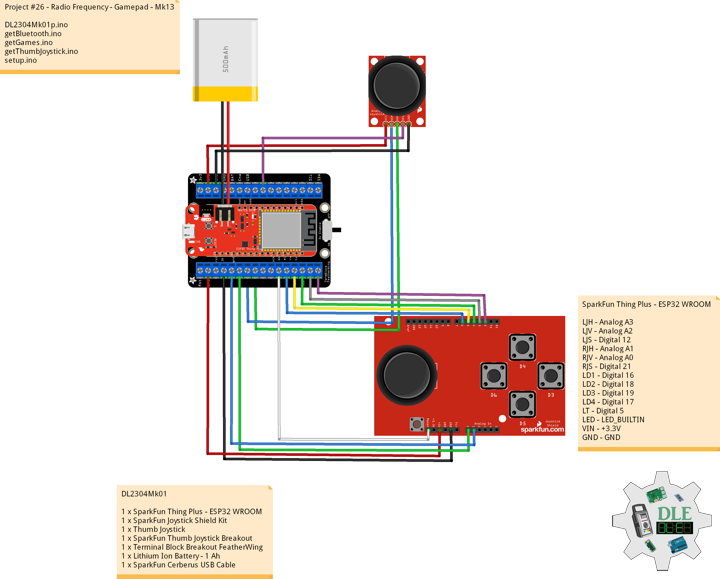
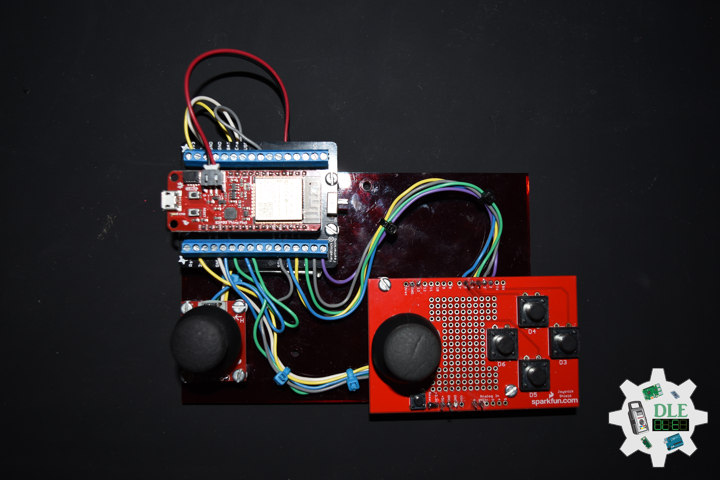
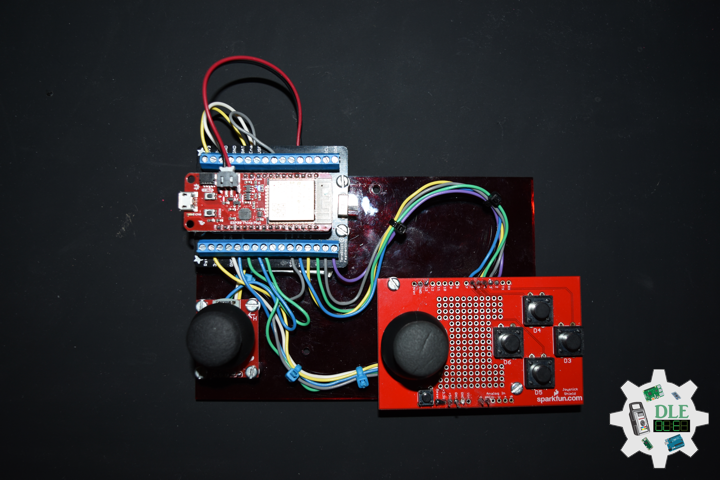
Project #26 – Radio Frequency – Joystick Test Application – Mk13
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #JoystickTest #Gamepad #ESP32 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Joystick Test Application
While experimenting with making my own controllers recently, I needed a nice visual way of testing them in Windows. As you can see it’s pretty simple and just shows a visual representation of each axis, POV and button. Currently it supports Joysticks with 8 axes, 4 POV and up to 128 buttons. I haven’t had a chance to test it with over 32 buttons so I would be interested to here from anyone who has such a device. It should work on XP upwards but I have only tested it on Windows 10 64 bit. You just need Net framework 3 and DirectX 9 to run it.
DL2304Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LJH – Analog A3
LJV – Analog A2
LJS – Digital 12
RJH – Analog A1
RJV – Analog A0
RJS – Digital 21
LD1 – Digital 16
LD2 – Digital 18
LD3 – Digital 19
LD4 – Digital 17
LT – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2304Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Joystick Test Application - Mk13
26-13
DL2304Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// ESP32 BLE Gamepad
#include <BleGamepad.h>
// ESP32 BLE Gamepad
BleGamepad bleGamepad;
// Left Joystick
#define LJH A3
#define LJV A2
#define LJS 12
// Right Joystick
#define RJH A1
#define RJV A0
#define RJS 21
// D-pad
#define LD1 16
#define LD2 18
#define LD3 19
#define LD4 17
// LT
#define LT 5
// Previous Button State
int previousButton1State = HIGH;
int previousButton2State = HIGH;
int previousButton3State = HIGH;
int previousButton4State = HIGH;
int previousButton5State = HIGH;
int previousButton6State = HIGH;
int previousButton7State = HIGH;
// Number of pot samples to take (to smooth the values)
const int numberOfPotSamples = 5;
// Delay in milliseconds between pot samples
const int delayBetweenSamples = 2;
// Additional delay in milliseconds between HID reports
const int delayBetweenHIDReports = 5;
// Delay in milliseconds between button press
const int debounceDelay = 10;
// Software Version Information
String sver = "26-13";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Gamepad
if(bleGamepad.isConnected())
{
// Button
isButton();
// Joystick
isThumbJoystick();
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(LJS, INPUT_PULLUP);
pinMode(RJS, INPUT_PULLUP);
pinMode(LD1, INPUT_PULLUP);
pinMode(LD2, INPUT_PULLUP);
pinMode(LD3, INPUT_PULLUP);
pinMode(LD4, INPUT_PULLUP);
pinMode(LT, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Button
void isButton(){
// Button1 State LD1
int currentButton1State = digitalRead(LD1);
if (currentButton1State != previousButton1State)
{
if (currentButton1State == LOW)
{
bleGamepad.press(BUTTON_1);
}
else
{
bleGamepad.release(BUTTON_1);
}
}
previousButton1State = currentButton1State;
// Button2 State LD2
int currentButton2State = digitalRead(LD2);
if (currentButton2State != previousButton2State)
{
if (currentButton2State == LOW)
{
bleGamepad.press(BUTTON_2);
}
else
{
bleGamepad.release(BUTTON_2);
}
}
previousButton2State = currentButton2State;
// Button3 State LD3
int currentButton3State = digitalRead(LD3);
if (currentButton3State != previousButton3State)
{
if (currentButton3State == LOW)
{
bleGamepad.press(BUTTON_3);
}
else
{
bleGamepad.release(BUTTON_3);
}
}
previousButton3State = currentButton3State;
// Button4 State LD4
int currentButton4State = digitalRead(LD4);
if (currentButton4State != previousButton4State)
{
if (currentButton4State == LOW)
{
bleGamepad.press(BUTTON_4);
}
else
{
bleGamepad.release(BUTTON_4);
}
}
previousButton4State = currentButton4State;
// Button5 State LJS
int currentButton5State = digitalRead(LJS);
if (currentButton5State != previousButton5State)
{
if (currentButton5State == LOW)
{
bleGamepad.press(BUTTON_5);
}
else
{
bleGamepad.release(BUTTON_5);
}
}
previousButton5State = currentButton5State;
// Button6 State RJS
int currentButton6State = digitalRead(RJS);
if (currentButton6State != previousButton6State)
{
if (currentButton6State == LOW)
{
bleGamepad.press(BUTTON_6);
}
else
{
bleGamepad.release(BUTTON_6);
}
}
previousButton6State = currentButton6State;
// Button7 State LT
int currentButton7State = digitalRead(LT);
if (currentButton7State != previousButton7State)
{
if (currentButton7State == LOW)
{
bleGamepad.press(BUTTON_7);
}
else
{
bleGamepad.release(BUTTON_7);
}
}
previousButton7State = currentButton7State;
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick LJH
// Joystick Pot Values LJH
int potValues[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues[i] = analogRead(LJH);
delay(delayBetweenSamples);
}
int potValue = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue += potValues[i];
}
// Value / Pot Samples
potValue = potValue / numberOfPotSamples;
// Adjusted Value
int adjustedValue = map(potValue, 0, 4095, 32737, 0);
// Joystick LJV
// Joystick Pot Values LJV
int potValues2[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues2[i] = analogRead(LJV);
delay(delayBetweenSamples);
}
int potValue2 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue2 += potValues2[i];
}
// Value2 / Pot Samples
potValue2 = potValue2 / numberOfPotSamples;
// Adjusted Value2
int adjustedValue2 = map(potValue2, 0, 4095, 32737, 0);
// Joystick RJH
// Joystick Pot Values RJH
int potValues3[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues3[i] = analogRead(RJH);
delay(delayBetweenSamples);
}
int potValue3 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue3 += potValues3[i];
}
// Value3 / Pot Samples
potValue3 = potValue3 / numberOfPotSamples;
// Adjusted Value3
int adjustedValue3 = map(potValue3, 0, 4095, 32737, 0);
// Joystick RJV
// Joystick Pot Values RJV
int potValues4[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues4[i] = analogRead(RJV);
delay(delayBetweenSamples);
}
int potValue4 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue4 += potValues4[i];
}
// Value4 / Pot Samples
potValue4 = potValue4 / numberOfPotSamples;
// Adjusted Value4
int adjustedValue4 = map(potValue4, 0, 4095, 32737, 0);
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_CENTERED);
delay(delayBetweenHIDReports);
// D-pad
// LD1
if (digitalRead(LD1) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_UP);
}
// LD2
if (digitalRead(LD2) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_LEFT);
}
// LD3
if (digitalRead(LD3) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_DOWN);
}
// LD4
if (digitalRead(LD4) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_RIGHT);
}
}
setup.ino
// Setup
void setup()
{
// Set Inputs
setInputs();
// ESP32 BLE Gamepad
bleGamepad.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
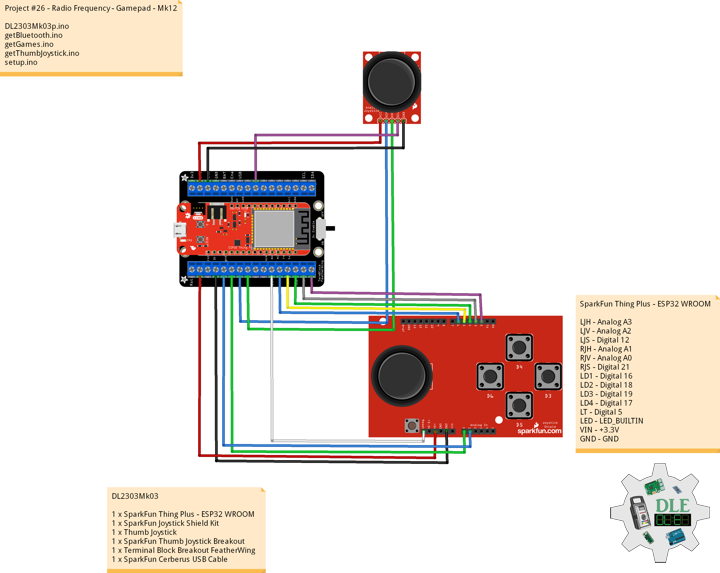
Project #26 – Radio Frequency – Gamepad – Mk12
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Gamepad #SparkFunThingPlusESP32WROOM #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
Gamepad
A gamepad is a type of video game controller held in two hands, where the fingers are used to provide input. They are typically the main input device for video game consoles. Gamepads generally feature a set of buttons handled with the right thumb and a direction controller handled with the left. The direction controller has traditionally been a four-way digital cross, also named a joypad, or alternatively a D-pad, and never called arrow keys, but most modern controllers additionally feature one or more analog sticks.
DL2303Mk03
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LJH – Analog A3
LJV – Analog A2
LJS – Digital 12
RJH – Analog A1
RJV – Analog A0
RJS – Digital 21
LD1 – Digital 16
LD2 – Digital 18
LD3 – Digital 19
LD4 – Digital 17
LT – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2303Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Gamepad - Mk12
26-12
DL2303Mk03p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// ESP32 BLE Gamepad
#include <BleGamepad.h>
// ESP32 BLE Gamepad
BleGamepad bleGamepad;
// Left Joystick
#define LJH A3
#define LJV A2
#define LJS 12
// Right Joystick
#define RJH A1
#define RJV A0
#define RJS 21
// D-pad
#define LD1 16
#define LD2 18
#define LD3 19
#define LD4 17
// LT
#define LT 5
// Number of pot samples to take (to smooth the values)
const int numberOfPotSamples = 5;
// Delay in milliseconds between pot samples
const int delayBetweenSamples = 2;
// Additional delay in milliseconds between HID reports
const int delayBetweenHIDReports = 5;
// Delay in milliseconds between button press
const int debounceDelay = 10;
// Software Version Information
String sver = "26-12";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
// Delay
delay(500);
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Gamepad
if(bleGamepad.isConnected())
{
// Button
isButton();
// Joystick
isThumbJoystick();
// Serial
Serial.println(" *");
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(LJS, INPUT_PULLUP);
pinMode(RJS, INPUT_PULLUP);
pinMode(LD1, INPUT_PULLUP);
pinMode(LD2, INPUT_PULLUP);
pinMode(LD3, INPUT_PULLUP);
pinMode(LD4, INPUT_PULLUP);
pinMode(LT, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Button
void isButton(){
// Left Joystick
if (digitalRead(LJS) == LOW) {
bleGamepad.press(LJS);
delay(debounceDelay);
bleGamepad.release(LJS);
Serial.print(" LJS");
}
// Right Joystick
if (digitalRead(RJS) == LOW) {
bleGamepad.press(RJS);
delay(debounceDelay);
bleGamepad.release(RJS);
Serial.print(" RJS");
}
// LT
if (digitalRead(LT) == LOW) {
bleGamepad.press(LT);
delay(debounceDelay);
bleGamepad.release(LT);
Serial.print(" LT");
}
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick LJH
// Joystick Pot Values LJH
int potValues[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues[i] = analogRead(LJH);
delay(delayBetweenSamples);
}
int potValue = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue += potValues[i];
}
// Value / Pot Samples
potValue = potValue / numberOfPotSamples;
// Serial
Serial.print(" LJH: ");
Serial.print(potValue);
// Adjusted Value
int adjustedValue = map(potValue, 0, 4095, 127, -127);
// Joystick LJV
// Joystick Pot Values LJV
int potValues2[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues2[i] = analogRead(LJV);
delay(delayBetweenSamples);
}
int potValue2 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue2 += potValues2[i];
}
// Value2 / Pot Samples
potValue2 = potValue2 / numberOfPotSamples;
// Serial
Serial.print(" LJV: ");
Serial.print(potValue2);
// Adjusted Value2
int adjustedValue2 = map(potValue2, 0, 4095, 127, -127);
// Joystick RJH
// Joystick Pot Values RJH
int potValues3[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues3[i] = analogRead(RJH);
delay(delayBetweenSamples);
}
int potValue3 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue3 += potValues3[i];
}
// Value3 / Pot Samples
potValue3 = potValue3 / numberOfPotSamples;
// Serial
Serial.print(" RJH: ");
Serial.print(potValue3);
// Adjusted Value3
int adjustedValue3 = map(potValue3, 0, 4095, 255, 0);
// Joystick RJV
// Joystick Pot Values RJV
int potValues4[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues4[i] = analogRead(RJV);
delay(delayBetweenSamples);
}
int potValue4 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue4 += potValues4[i];
}
// Value4 / Pot Samples
potValue4 = potValue4 / numberOfPotSamples;
// Serial
Serial.print(" RJV: ");
Serial.print(potValue4);
// Adjusted Value4
int adjustedValue4 = map(potValue4, 0, 4095, 255, 0);
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_CENTERED);
delay(delayBetweenHIDReports);
// D-pad
// LD1
if (digitalRead(LD1) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_UP);
Serial.print(" DPAD_UP");
}
// LD2
if (digitalRead(LD2) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_LEFT);
Serial.print(" DPAD_LEFT");
}
// LD3
if (digitalRead(LD3) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_DOWN);
Serial.print(" DPAD_DOWN");
}
// LD4
if (digitalRead(LD4) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_RIGHT);
Serial.print(" DPAD_RIGHT");
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Set Inputs
setInputs();
// ESP32 BLE Gamepad
bleGamepad.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc