——
#DonLucElectronics #DonLuc #DFRobot #HMC5883L #ADXL335 #GPS #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #SparkFun #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
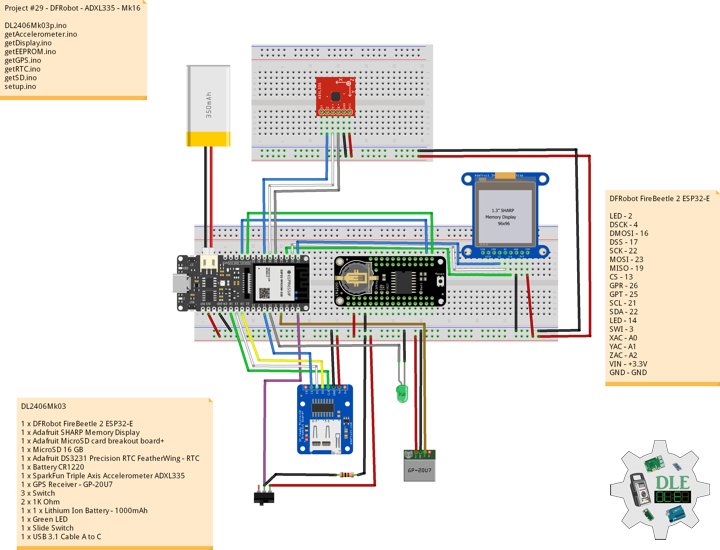
SparkFun Triple Axis Magnetometer Breakout – HMC5883L
This is a breakout board for Honeywell’s HMC5883L, a 3-axis digital compass. Communication with the HMC5883L is simple and all done through an I2C interface. There is no on-board regulator, so a regulated voltage of 2.16-3.6VDC should be supplied. The breakout board includes the HMC5883L sensor and all filtering capacitors as shown. The power and 2-wire interface pins are all broken out to a 0.1 inch pitch header.
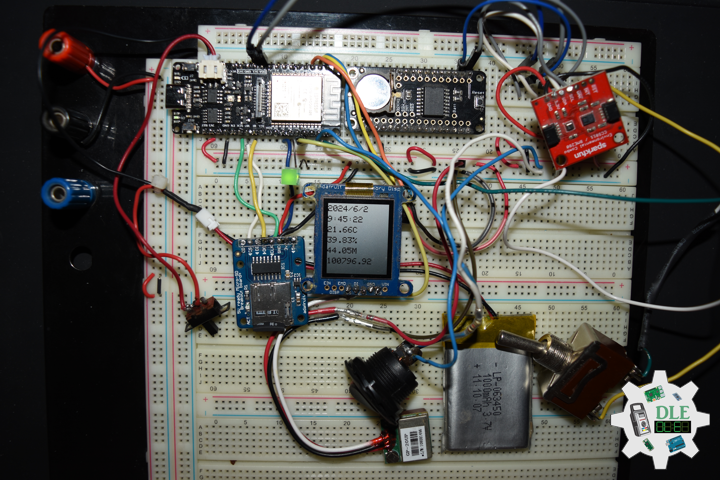
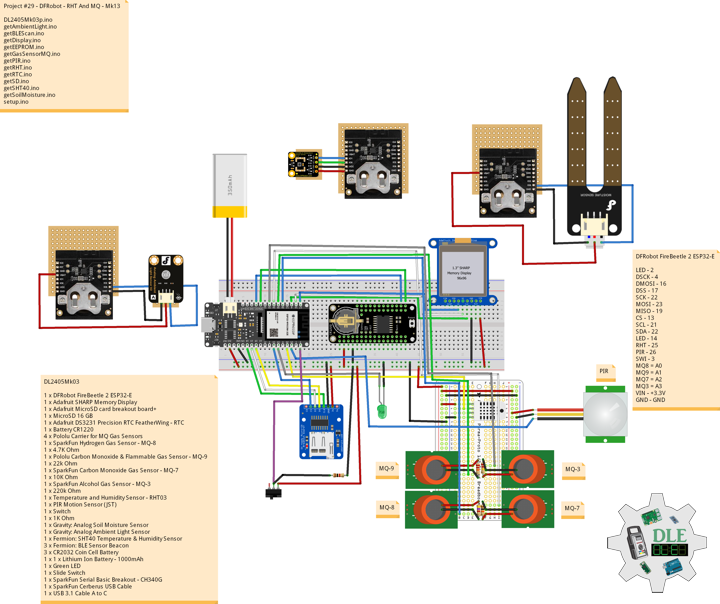
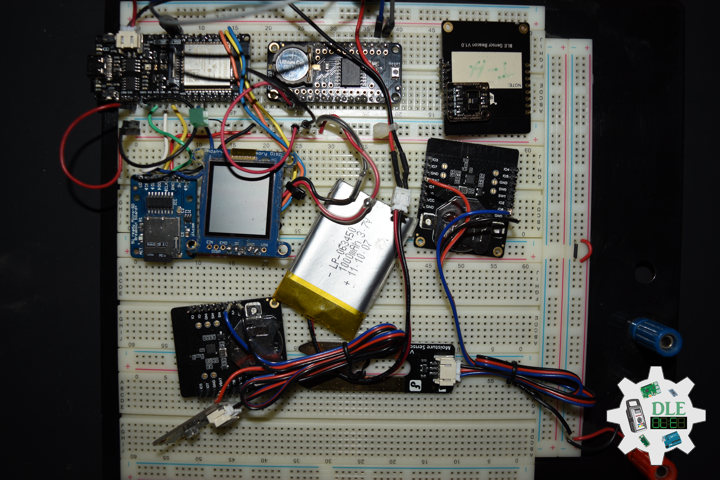
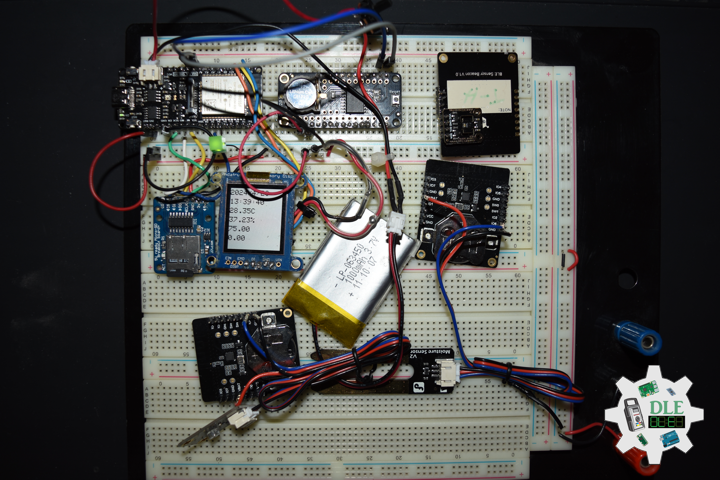
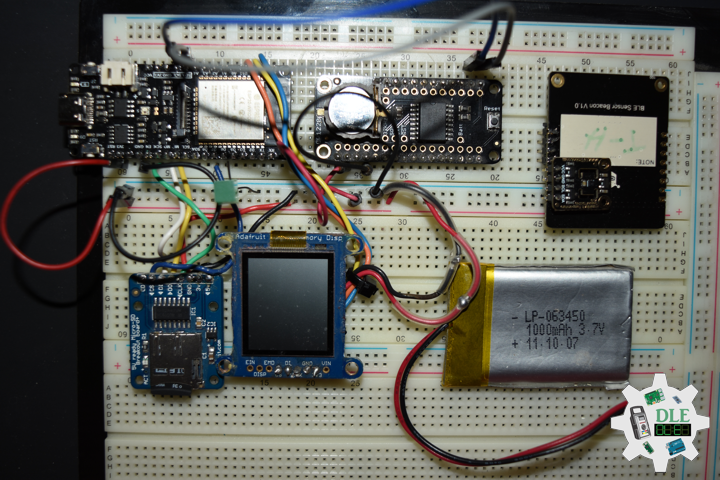
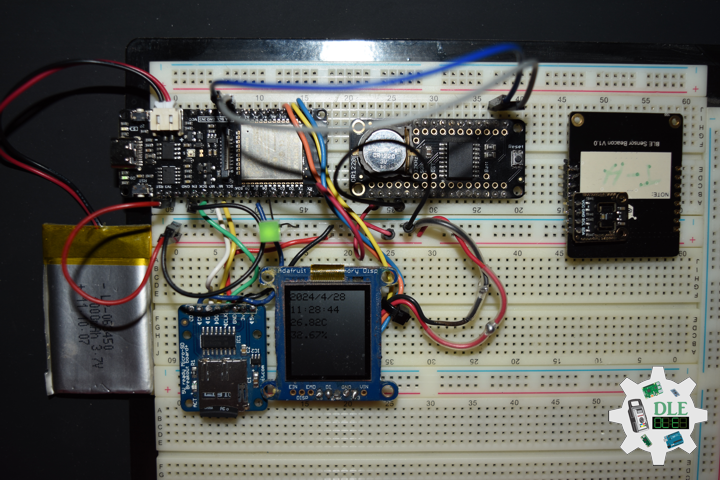
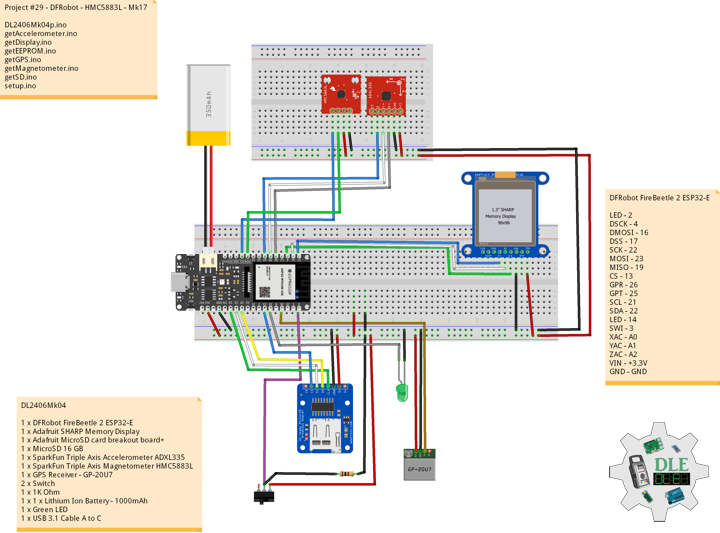
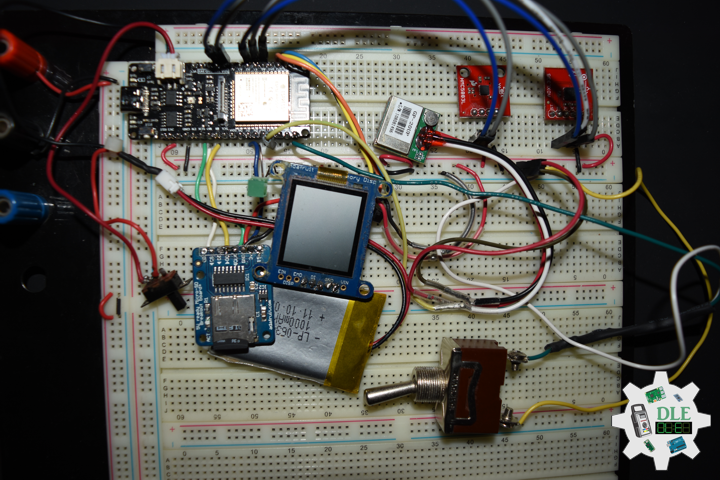
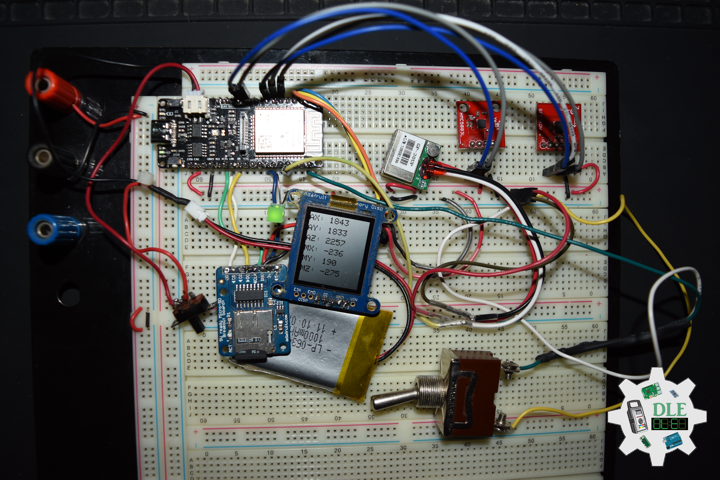
DL2406Mk04
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x SparkFun Triple Axis Magnetometer HMC5883L
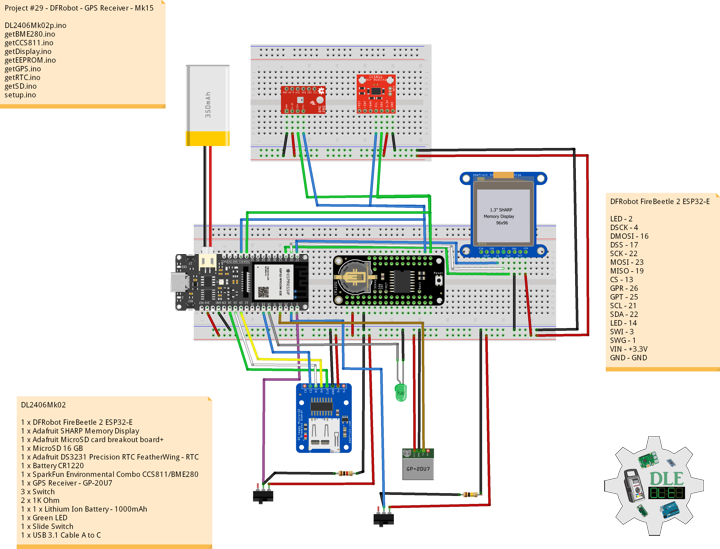
1 x GPS Receiver – GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
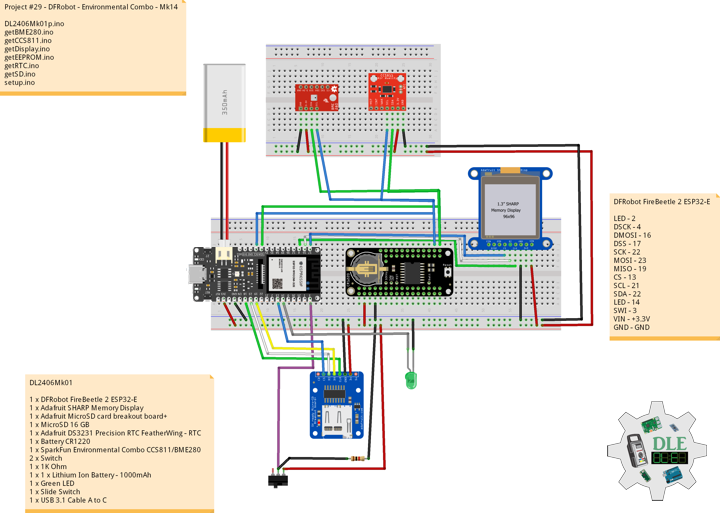
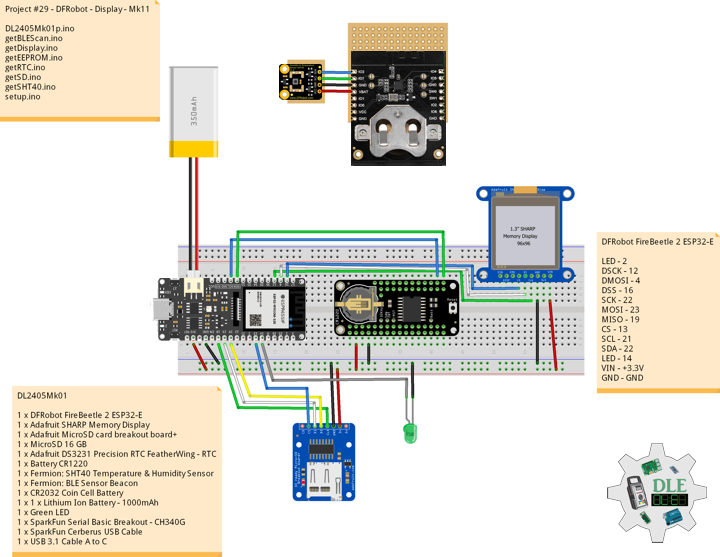
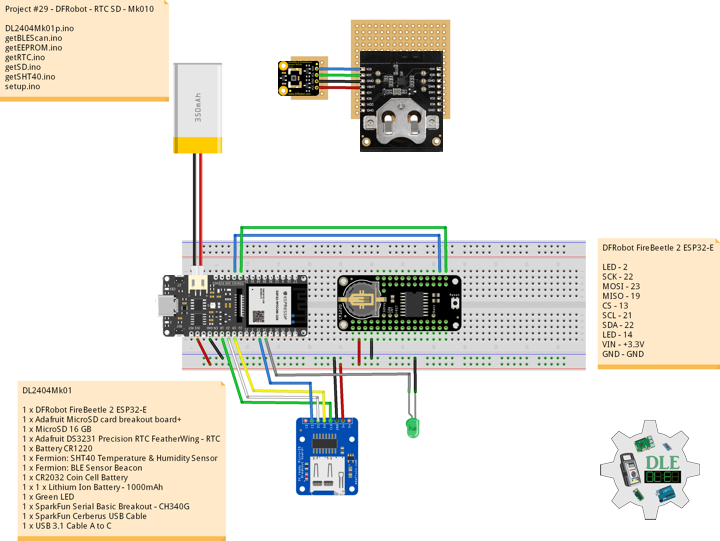
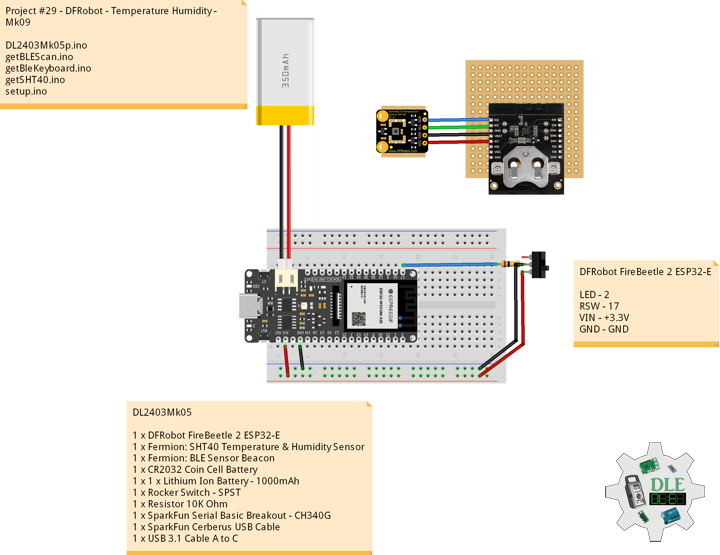
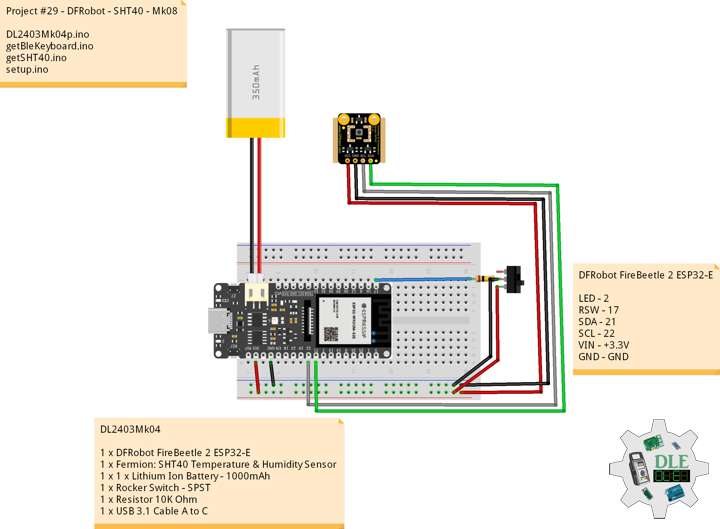
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
GPR – 26
GPT – 25
SCL – 21
SDA – 22
LED – 14
SWI – 3
XAC – A0
YAC – A1
ZAC – A2
VIN – +3.3V
GND – GND
——
DL2406Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - HMC5883L - Mk17
29-17
DL2406Mk04p.ino
DL2406Mk04
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x SparkFun Triple Axis Magnetometer HMC5883L
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x GPS Receiver - GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// Triple Axis Magnetometer
HMC5883L compass;
// Triple Axis Magnetometer
int mX = 0;
int mY = 0;
int mZ = 0;
// Accelerometer ADXL335
int iX = A0;
int iY = A1;
int iZ = A2;
// Accelerometer
int X = 0;
int Y = 0;
int Z = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 26
// This one is unused and doesnt have a conection
#define gpsTXPIN 25
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-17";
void loop() {
// isGPS
isGPS();
// Accelerometer ADXL335
isADXL335();
// Magnetometer
isMagnetometer();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Display Accelerometer ADXL335
isDisplayADXL335();
} else {
// Display GPS
isDisplayGPS();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 5 Second
delay(5000);
}
getAccelerometer.ino
// Accelerometer ADXL335
// ADXL335
void isADXL335() {
// Accelerometer ADXL335
// Accelerometer X, Y, Z
// X
X = analogRead(iX);
// Y
Y = analogRead(iY);
// Z
Z = analogRead(iZ);
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Accelerometer ADXL335
void isDisplayADXL335() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Accelerometer X
display.setCursor(0,5);
display.print( "AX: " );
display.println( X );
// Accelerometer Y
display.setCursor(0,30);
display.print( "AY: " );
display.println( Y );
// Accelerometer Z
display.setCursor(0,55);
display.print( "AZ: " );
display.println( Z );
// Magnetometer X
display.setCursor(0,80);
display.print( "MX: " );
display.println( mX );
// Magnetometer Y
display.setCursor(0,105);
display.print( "MY: " );
display.println( mY );
// Magnetometer Z
display.setCursor(0,130);
display.print( "MZ: " );
display.println( mZ );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Latitude
display.setCursor(0,5);
display.print( "Lat: " );
display.println( TargetLat );
// Longitude
display.setCursor(0,30);
display.print( "Lon: " );
display.println( TargetLon );
// GPS Date
display.setCursor(0,55);
display.println( TargetDat );
// GPS Time
display.setCursor(0,80);
display.println( TargetTim );
// GPS Speed M/S
display.setCursor(0,105);
display.print( TargetSMS );
display.println( " M/S" );
// GPS Altitude Meters
display.setCursor(0,130);
display.print( TargetALT );
display.println( " M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMagnetometer(){
// Magnetometer Serial
// Initialize HMC5883L
while (!compass.begin())
{
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
}
// Magnetometer
void isMagnetometer(){
// Magnetometer Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
// Magnetometer X Normalize
mX = norm.XAxis;
// Magnetometer Y Normalize
mY = norm.YAxis;
// Magnetometer Z Normalize
mZ = norm.ZAxis;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// DFR|EEPROM Unique ID|Version|Date|Time|
//Accelerometer X|Accelerometer Y|Accelerometer Z
//Magnetometer X|Magnetometer Y|Magnetometer Z
//|GPS|Latitude|Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Altitude|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String(X) + "|" + String(Y) + "|" + String(Z) + "|"
+ String(mX) + "|" + String(mY) + "|" + String(mZ) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|"
+ String(TargetLon) + "|" + String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetALT)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
//MicroSD Card
isSetupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// Setup Triple Axis Magnetometer
isSetupMagnetometer();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc