Fritzing
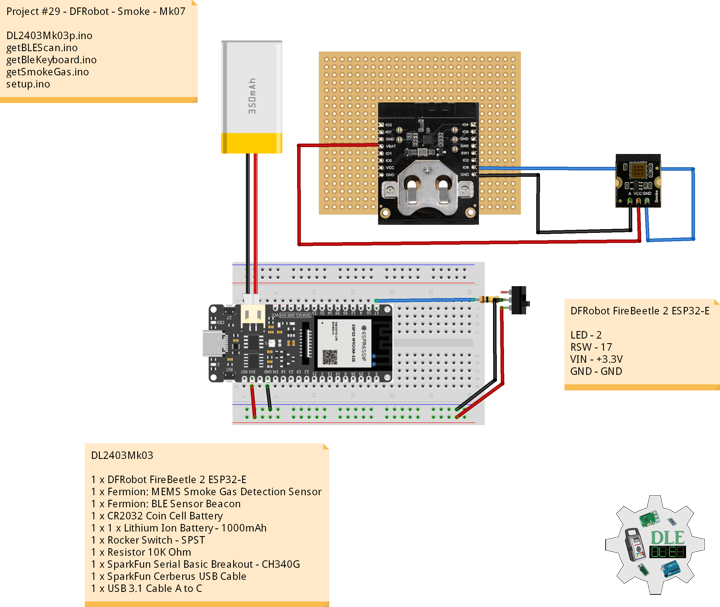
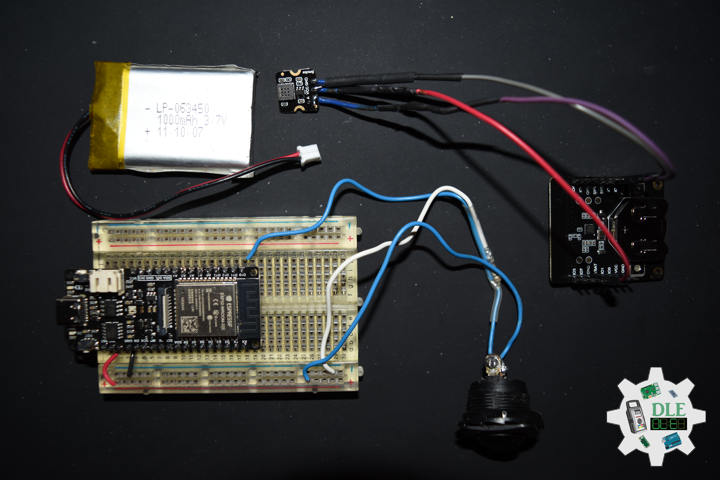
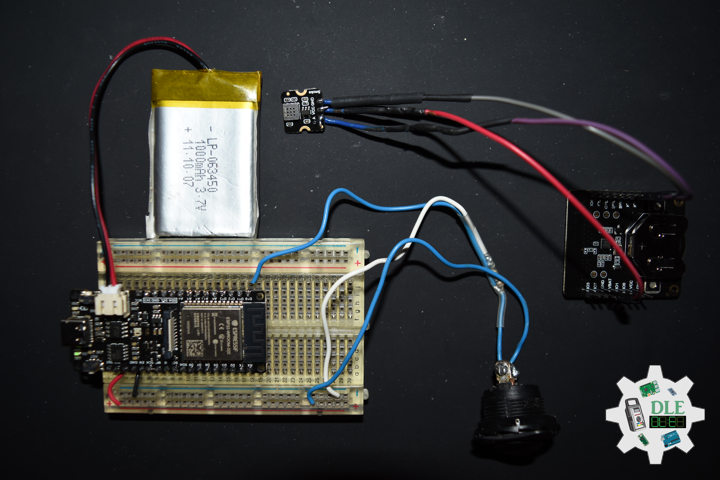
Project #29 – DFRobot – Smoke – Mk07
——
#DonLucElectronics #DonLuc #DFRobot #FermionBLESensorBeacon #MEMSSmokeGas #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Smoke
Smoke is a suspension of airborne particulates and gases emitted when a material undergoes combustion or pyrolysis, together with the quantity of air that is entrained or otherwise mixed into the mass. It is commonly an unwanted by-product of fires, but may also be used for pest control, communication, defensive and offensive capabilities in the military, cooking, or smoking. It is used in rituals where incense, sage, or resin is burned to produce a smell for spiritual or magical purposes. It can also be a flavoring agent and preservative.
Smoke inhalation is the primary cause of death in victims of indoor fires. The smoke kills by a combination of thermal damage, poisoning and pulmonary irritation caused by carbon monoxide, hydrogen cyanide and other combustion products. Smoke is an aerosol of solid particles and liquid droplets that are close to the ideal range of sizes for Mie scattering of visible light.
DL2403Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout – CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
VIN – +3.3V
GND – GND
——
DL2403Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Smoke - Mk07
29-07
DL2403Mk03p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout - CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Arduino
#include <Arduino.h>
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLEScan
#include <BLEScan.h>
// BLE Advertised Device
#include <BLEAdvertisedDevice.h>
// BLE Eddystone URL
#include <BLEEddystoneURL.h>
// BLE Eddystone TLM
#include <BLEEddystoneTLM.h>
// BLE Beacon
#include <BLEBeacon.h>
// ENDIAN_CHANGE
#define ENDIAN_CHANGE_U16(x) ((((x)&0xFF00) >> 8) + (((x)&0xFF) << 8))
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Fermion: MEMS Smoke Gas Detection Sensor
float Sensor_Data;
// In seconds
int scanTime = 5;
// BLE Scan
BLEScan *pBLEScan;
// My Advertised Device Callbacks
class MyAdvertisedDeviceCallbacks : public BLEAdvertisedDeviceCallbacks
{
// onResult
void onResult(BLEAdvertisedDevice advertisedDevice)
{
// Advertised Device
if (advertisedDevice.haveName())
{
// Name: Fermion: Sensor Beacon
if(String(advertisedDevice.getName().c_str()) == "Smoke Gas"){
// strManufacturerData
std::string strManufacturerData = advertisedDevice.getManufacturerData();
uint8_t cManufacturerData[100];
strManufacturerData.copy((char *)cManufacturerData, strManufacturerData.length(), 0);
// strManufacturerData.length
for (int i = 0; i < strManufacturerData.length(); i++)
{
// cManufacturerData[i]
cManufacturerData[i];
}
// Sensor_Data
Sensor_Data = int(cManufacturerData[2]<<8 | cManufacturerData[3]);
}
}
}
};
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-07";
void loop() {
// ScanResults
isBLEScanResults();
// Fermion: MEMS Smoke Gas Detection Sensor
isSmokeGas();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 2 Second
delay(2000);
}
getBLEScan.ino
// getBLEScan
// Setup BLE Scan
void isSetupBLEScan(){
// BLE Device
BLEDevice::init("");
// Create new scan
pBLEScan = BLEDevice::getScan();
// Set Advertised Device Callbacks
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
// Active scan uses more power, but get results faster
pBLEScan->setActiveScan(true);
// Set Interval
pBLEScan->setInterval(100);
// Less or equal setInterval value
pBLEScan->setWindow(99);
}
// BLE Scan Results
void isBLEScanResults(){
// Put your main code here, to run repeatedly:
BLEScanResults foundDevices = pBLEScan->start(scanTime, false);
// Delete results fromBLEScan buffer to release memory
pBLEScan->clearResults();
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getSmokeGas.ino
// Fermion: MEMS Smoke Gas Detection Sensor
// Smoke Gas
void isSmokeGas(){
// bleKeyboard (10-1000ppm)
// DFR|Version|Smoke Gas Detection|*
sKeyboard = "DFR|" + sver + "|" + String(Sensor_Data) + "|*";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Setup BLE Scan
isSetupBLEScan();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
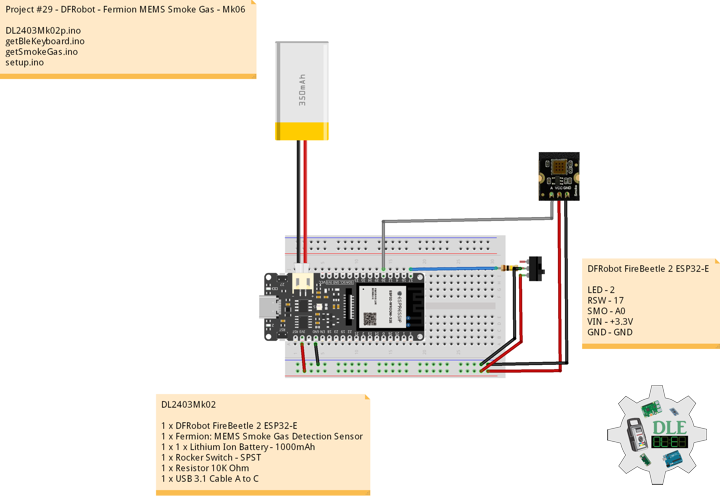
Project #29 – DFRobot – Fermion MEMS Smoke Gas – Mk06
——
#DonLucElectronics #DonLuc #DFRobot #MEMSSmokeGas #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Fermion: MEMS Smoke Gas Detection Sensor
Fermion: MEMS Smoke Gas Detection Sensor employs state-of-the-art microelectromechanical system (MEMS) technology, endowing the sensor with compact dimensions, low power consumption, minimal heat generation, short preheating time, and swift response recovery. The sensor can measure smoke concentration qualitatively and is suitable for smoke alarm and other application scenarios.
Precautions for use:
- Kindly remove the protective film before usage.
- To prevent exposure to volatile silicon compounds vapors.
- Refrain from prolonged exposure to extreme environments.
- Avoid contact with water, condensation, and freezing.
- Minimize excessive vibration, impact, and dropping.
- For extended periods of non-usage, it is advisable to preheat the module for at least 24 hours.
DL2403Mk02
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
SMO – A0
VIN – +3.3V
GND – GND
——
DL2403Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Fermion MEMS Smoke Gas - Mk06
29-06
DL2403Mk02p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Fermion: MEMS Smoke Gas Detection Sensor
int iSmokeGas = A0;
int iSmokeGasVal = 0;
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-06";
void loop() {
// Fermion: MEMS Smoke Gas Detection Sensor
isSmokeGas();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getSmokeGas.ino
// Fermion: MEMS Smoke Gas Detection Sensor
// Smoke Gas
void isSmokeGas(){
// Connect Smoke Gas Sensor to Analog 0
iSmokeGasVal = analogRead( iSmokeGas );
// bleKeyboard (10-1000ppm)
// DFR|Version|Smoke Gas Detection|*
sKeyboard = "DFR|" + sver + "|" + String(iSmokeGasVal) + "|*";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
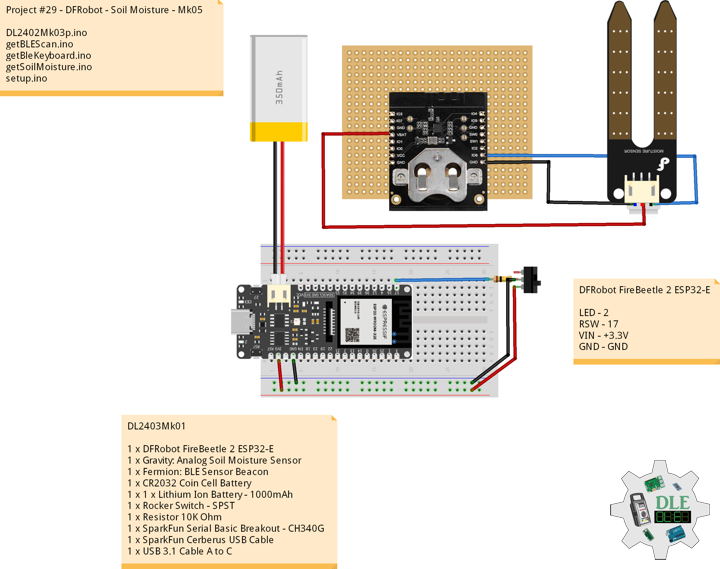
Project #29 – DFRobot – Soil Moisture – Mk05
——
#DonLucElectronics #DonLuc #DFRobot #SoilMoistureSensor #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Soil Moisture
Soil moisture is the critical parameter in agriculture. If there is a shortage or overabundance of water, plants may die. At the same time, this data depends on many external factors, primarily weather conditions and climate changes. That is why it is so vital to understand the most effective methods for analyzing soil moisture content.
This term refers to the entire quantity of water in the ground’s pores or on its surface. The moisture content of soil depends on such factors as weather, type of land, and plants. The parameter is vital in monitoring soil moisture activities, predicting natural disasters, managing water supply, etc. This data may signal a future flood or water deficit ahead of other indicators.
Soil moisture affects:
- Content of air, salinity, and amount of toxic substances.
- Ground structure and thickness.
- Temperature and heat capacity of the ground.
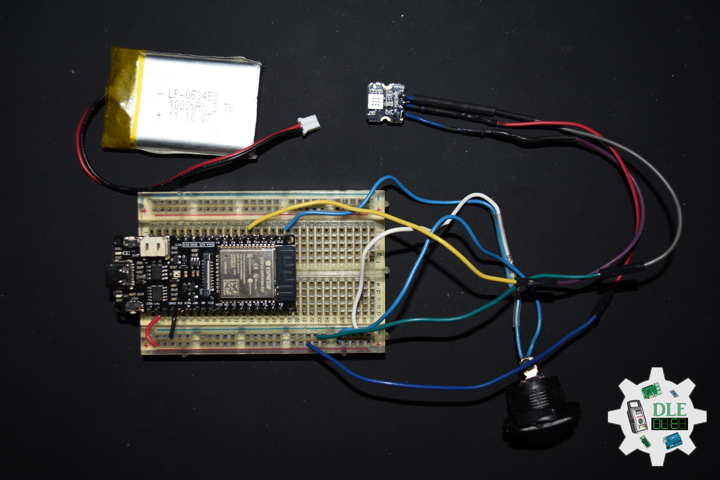
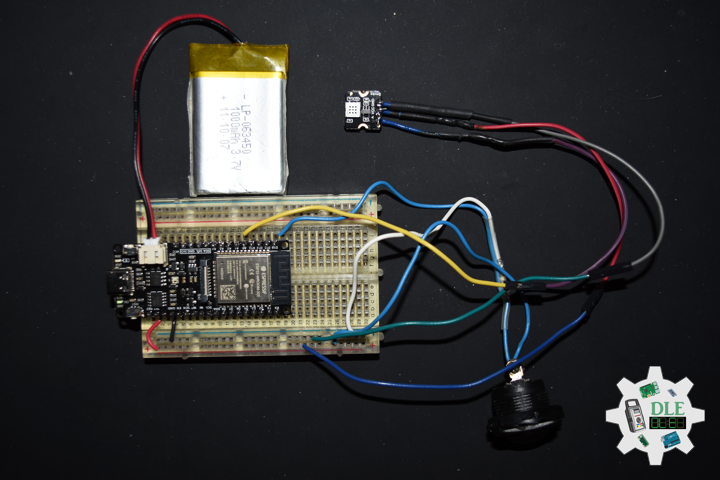
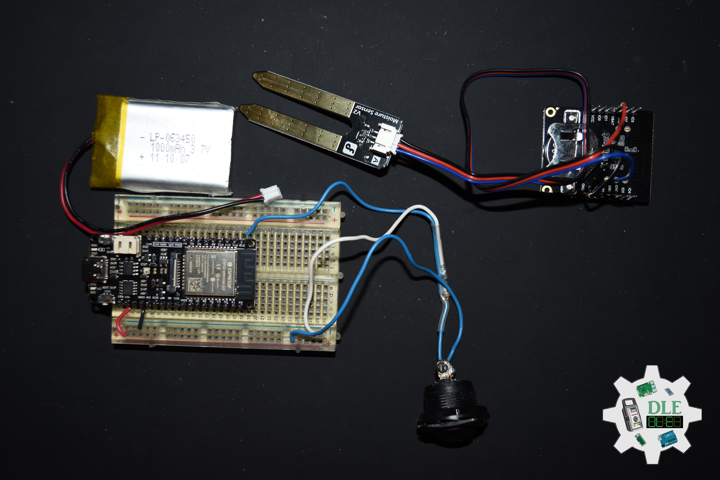
DL2403Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Gravity: Analog Soil Moisture Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout – CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
VIN – +3.3V
GND – GND
——
DL2403Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Soil Moisture - Mk05
29-05
DL2403Mk01p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Gravity: Analog Soil Moisture Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout - CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Arduino
#include <Arduino.h>
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLEScan
#include <BLEScan.h>
// BLE Advertised Device
#include <BLEAdvertisedDevice.h>
// BLE Eddystone URL
#include <BLEEddystoneURL.h>
// BLE Eddystone TLM
#include <BLEEddystoneTLM.h>
// BLE Beacon
#include <BLEBeacon.h>
// ENDIAN_CHANGE
#define ENDIAN_CHANGE_U16(x) ((((x)&0xFF00) >> 8) + (((x)&0xFF) << 8))
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Gravity: Analog Soil Moisture Sensor
float Sensor_Data;
// In seconds
int scanTime = 5;
// BLE Scan
BLEScan *pBLEScan;
// My Advertised Device Callbacks
class MyAdvertisedDeviceCallbacks : public BLEAdvertisedDeviceCallbacks
{
// onResult
void onResult(BLEAdvertisedDevice advertisedDevice)
{
// Advertised Device
if (advertisedDevice.haveName())
{
// Name: Fermion: Sensor Beacon
if(String(advertisedDevice.getName().c_str()) == "Soil Moisture"){
// strManufacturerData
std::string strManufacturerData = advertisedDevice.getManufacturerData();
uint8_t cManufacturerData[100];
strManufacturerData.copy((char *)cManufacturerData, strManufacturerData.length(), 0);
// strManufacturerData.length
for (int i = 0; i < strManufacturerData.length(); i++)
{
// cManufacturerData[i]
cManufacturerData[i];
}
// Sensor_Data
Sensor_Data = int(cManufacturerData[2]<<8 | cManufacturerData[3]);
}
}
}
};
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-05";
void loop() {
// ScanResults
isBLEScanResults();
// Gravity: Analog Soil Moisture Sensor
isSoilMoisture();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 2 Second
delay(2000);
}
getBLEScan.ino
// getBLEScan
// Setup BLE Scan
void isSetupBLEScan(){
// BLE Device
BLEDevice::init("");
// Create new scan
pBLEScan = BLEDevice::getScan();
// Set Advertised Device Callbacks
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
// Active scan uses more power, but get results faster
pBLEScan->setActiveScan(true);
// Set Interval
pBLEScan->setInterval(100);
// Less or equal setInterval value
pBLEScan->setWindow(99);
}
// BLE Scan Results
void isBLEScanResults(){
// Put your main code here, to run repeatedly:
BLEScanResults foundDevices = pBLEScan->start(scanTime, false);
// Delete results fromBLEScan buffer to release memory
pBLEScan->clearResults();
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getSoilMoisture.ino
// Gravity: Analog Soil Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// bleKeyboard
// DFR|Version|Soil Moisture|*
// SData => 0~900 Soil Moisture
float SData = map( Sensor_Data, 1, 3000, 0, 900);
sKeyboard = "DFR|" + sver + "|" + String(SData) + "|*";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Setup BLE Scan
isSetupBLEScan();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
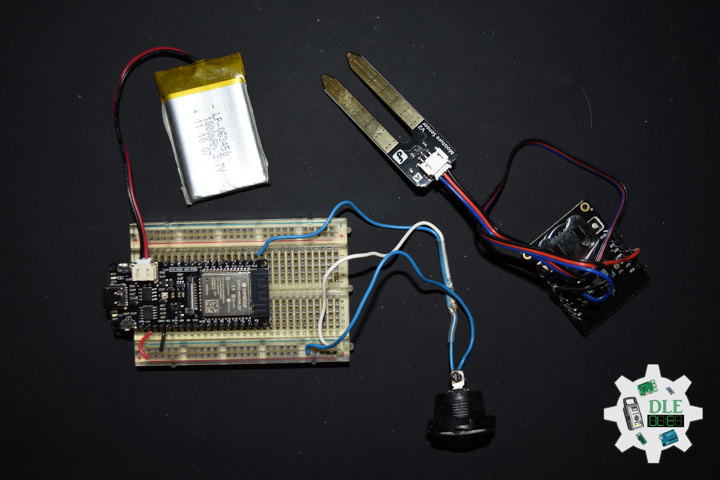
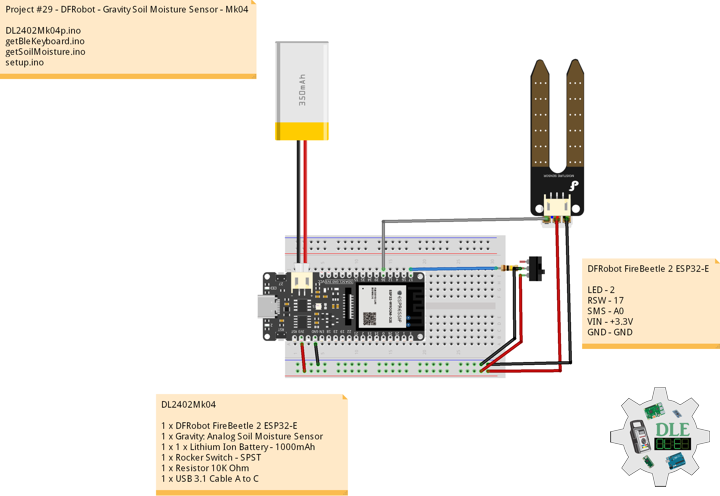
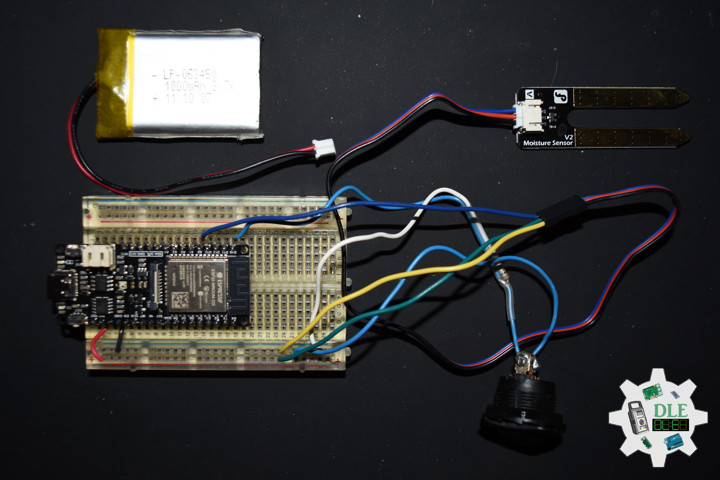
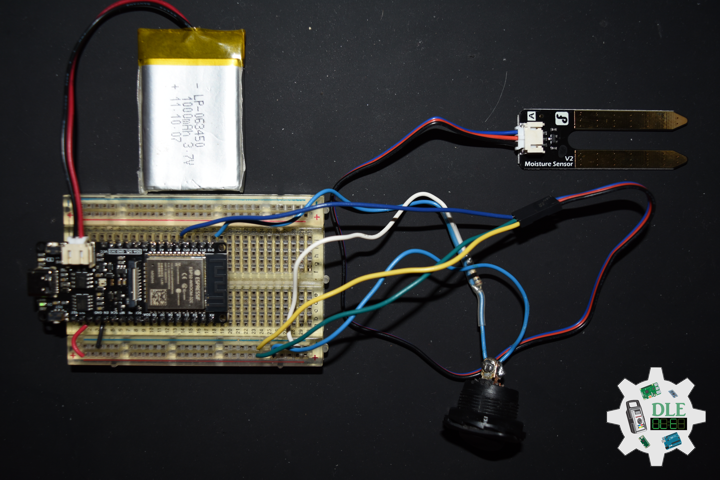
Project #29 – DFRobot – Gravity Soil Moisture Sensor – Mk04
——
#DonLucElectronics #DonLuc #DFRobot #SoilMoistureSensor #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Gravity: Analog Soil Moisture Sensor
A soil moisture sensor can read the amount of moisture present in the soil surrounding it. It’s an ideal for monitoring an urban garden, or your pet plant’s water level. This is a must have component for a IOT Garden / Agriculture. The new soil moisture sensor uses Immersion Gold which protects the nickel from oxidation. Electroless nickel immersion gold has several advantages over more conventional surface platings such as HASL, including excellent surface planarity, good oxidation resistance, and usability for untreated contact surfaces such as membrane switches and contact points.
This Soil Moisture Sensor uses the two probes to pass current through the soil, and then it reads that resistance to get the moisture level. More water makes the soil conduct electricity more easily, while dry soil conducts electricity poorly. This sensor will be helpful to remind you to water your indoor plants or to monitor the soil moisture in your garden.
DL2402Mk04
1 x DFRobot FireBeetle 2 ESP32-E
1 x Gravity: Analog Soil Moisture Sensor
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
SMS – A0
VIN – +3.3V
GND – GND
——
DL2402Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Gravity Soil Moisture Sensor - Mk04
29-04
DL2402Mk04p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Gravity: Analog Soil Moisture Sensor
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Gravity: Analog Soil Moisture Sensor
int iSoilMoisture = A0;
int iSoilMoistureVal = 0;
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-04";
void loop() {
// Gravity: Analog Soil Moisture Sensor
isSoilMoisture();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getSoilMoisture.ino
// Gravity: Analog Soil Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// Connect Soil Moisture Sensor to Analog 0
iSoilMoistureVal = analogRead( iSoilMoisture );
// SData => 0~900 Soil Moisture
float SData = map( iSoilMoistureVal, 1, 3000, 0, 900);
// bleKeyboard
// DFR|Version|Soil Moisture|*
sKeyboard = "DFR|" + sver + "|" + String(SData) + "|*";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
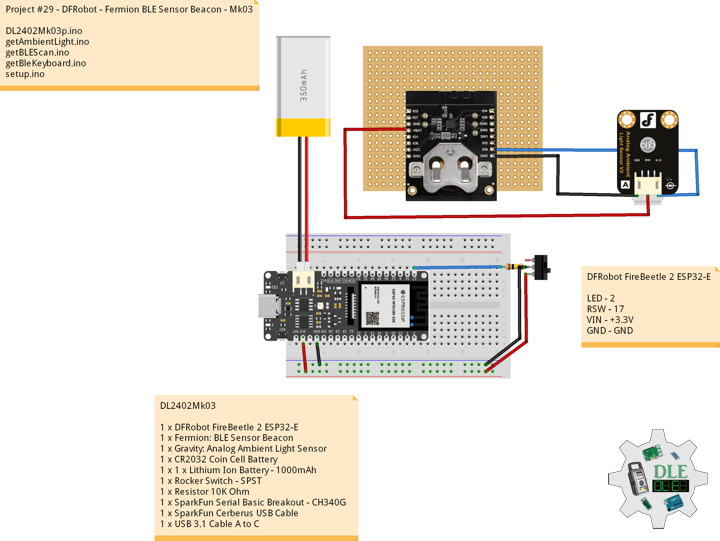
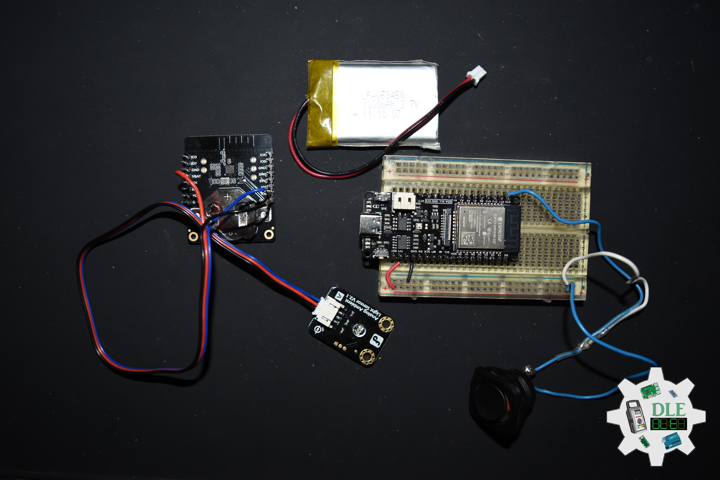
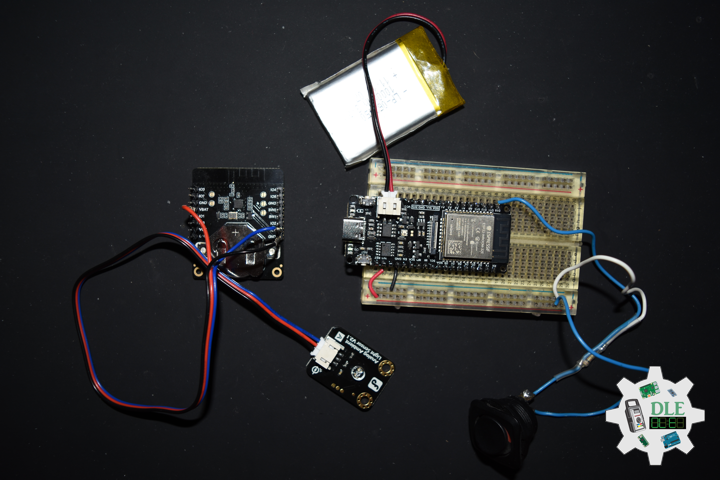
Project #29 – DFRobot – Fermion BLE Sensor Beacon – Mk03
——
#DonLucElectronics #DonLuc #DFRobot #FermionBLESensorBeacon #AmbientLight #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Fermion: BLE Sensor Beacon
BLE Beacon, also known as Low Energy Bluetooth Beacon, is a small wireless device that broadcasts signals using BLE technology. Due to its broadcast nature, pairing is not required between the beacon and receiving devices. Each beacon contains a unique identifier, detectable by nearby devices equipped with Bluetooth technology, such as ESP32 and smartphones supporting BLE scanning.
This Bluetooth beacon has a built-in 11-bit ADC, Fermion version, and multiple I/Os that can be multiplexed to SDA/SCL while broadcasting over Bluetooth. Users can access sensor data within broadcast range on a Bluetooth-equipped device such as a Smartphone or ESP32. This BLE beacon has a built-in 11-bit ADC and an I2C interface, allowing it to real-time collect and broadcast data from various types of sensors, including analog, digital, and I2C sensors.
DL2402Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: BLE Sensor Beacon
1 x Gravity: Analog Ambient Light Sensor
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout – CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
VIN – +3.3V
GND – GND
——
DL2402Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - - Mk03
29-03
DL2402Mk03p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: BLE Sensor Beacon
1 x Gravity: Analog Ambient Light Sensor
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout - CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Arduino
#include <Arduino.h>
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLEScan
#include <BLEScan.h>
// BLE Advertised Device
#include <BLEAdvertisedDevice.h>
// BLE Eddystone URL
#include <BLEEddystoneURL.h>
// BLE Eddystone TLM
#include <BLEEddystoneTLM.h>
// BLE Beacon
#include <BLEBeacon.h>
// ENDIAN_CHANGE
#define ENDIAN_CHANGE_U16(x) ((((x)&0xFF00) >> 8) + (((x)&0xFF) << 8))
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Gravity: Analog Ambient Light Sensor
float Sensor_Data;
// In seconds
int scanTime = 5;
// BLE Scan
BLEScan *pBLEScan;
// My Advertised Device Callbacks
class MyAdvertisedDeviceCallbacks : public BLEAdvertisedDeviceCallbacks
{
// onResult
void onResult(BLEAdvertisedDevice advertisedDevice)
{
// Advertised Device
if (advertisedDevice.haveName())
{
// Name: Fermion: Sensor Beacon
if(String(advertisedDevice.getName().c_str()) == "Fermion: Sensor Beacon"){
// strManufacturerData
std::string strManufacturerData = advertisedDevice.getManufacturerData();
uint8_t cManufacturerData[100];
strManufacturerData.copy((char *)cManufacturerData, strManufacturerData.length(), 0);
// strManufacturerData.length
for (int i = 0; i < strManufacturerData.length(); i++)
{
// cManufacturerData[i]
cManufacturerData[i];
}
// Sensor_Data
Sensor_Data = int(cManufacturerData[2]<<8 | cManufacturerData[3]);
}
}
}
};
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-03";
void loop() {
// ScanResults
isBLEScanResults();
// Gravity: Analog Ambient Light Sensor
isAmbientLight();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 2 Second
delay(2000);
}
getAmbientLight.ino
// Gravity: Analog Ambient Light Sensor
// Ambient Light
void isAmbientLight(){
// bleKeyboard
// DFR|Version|Lux|*
// SData => 1~6000 Lux
float SData = map(Sensor_Data, 1, 3000, 1, 6000);
sKeyboard = "DFR|" + sver + "|" + String(SData) + "|*";
}
getBLEScan.ino
// getBLEScan
// Setup BLE Scan
void isSetupBLEScan(){
// BLE Device
BLEDevice::init("");
// Create new scan
pBLEScan = BLEDevice::getScan();
// Set Advertised Device Callbacks
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
// Active scan uses more power, but get results faster
pBLEScan->setActiveScan(true);
// Set Interval
pBLEScan->setInterval(100);
// Less or equal setInterval value
pBLEScan->setWindow(99);
}
// BLE Scan Results
void isBLEScanResults(){
// Put your main code here, to run repeatedly:
BLEScanResults foundDevices = pBLEScan->start(scanTime, false);
// Delete results fromBLEScan buffer to release memory
pBLEScan->clearResults();
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Setup BLE Scan
isSetupBLEScan();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
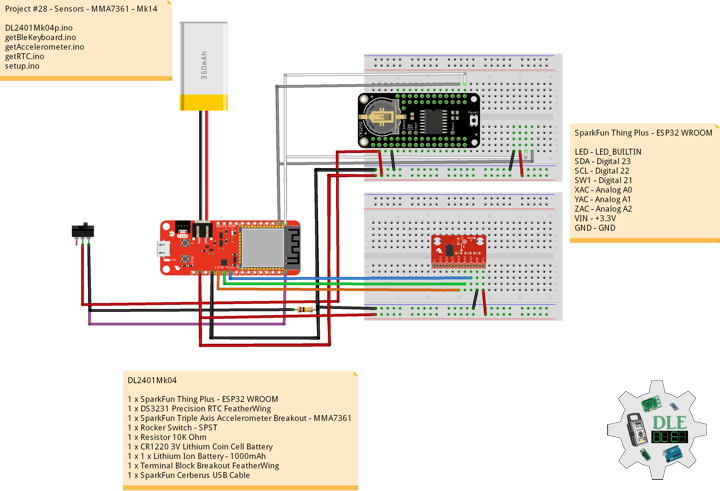
Project #28 – Sensors – MMA7361 – Mk14
——
#DonLucElectronics #DonLuc #Sensors #MMA7361 #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun Triple Axis Accelerometer Breakout – MMA7361
This is a breakout board for Freescale’s MMA7361L three-axis analog MEMS accelerometer. The sensor requires a very low amount of power and has a g-select input which switches the accelerometer between ±1.5g and ±6g measurement ranges. Other features include a sleep mode, signal conditioning, a 1-pole low pass filter, temperature compensation, self test, and 0g-detect which detects linear freefall. Zero-g offset and sensitivity are factory set and require no external devices.
This breadboard friendly board breaks out every pin of the MMA7361L to a 9-pin, 0.1″ pitch header. The sensor works on power between 2.2 and 3.6VDC (3.3 Volt optimal), and typically consumes just 400µA of current. All three axes have their own analog output.
- Two selectable measuring ranges (±1.5g, ±6g)
- Breadboard friendly – 0.1″ pitch header
- Low current consumption: 400 µA
- Sleep mode: 3 µA
- Low voltage operation: 2.2 Volt – 3.6 Volt
- High sensitivity (800 mV/g at 1.5g)
- Fast turn on time (0.5 ms enable response time)
- Self test for freefall detect diagnosis
- 0g-Detect for freefall protection
- Signal conditioning with low pass filter
- Robust design, high shocks survivability
DL2401Mk04
1 x SparkFun Thing Plus – ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x SparkFun Triple Axis Accelerometer Breakout – MMA7361
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
SW1 – Digital 21
XAC – Analog A0
YAC – Analog A1
ZAC – Analog A2
VIN – +3.3V
GND – GND
——
DL2401Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - MMA7361 - Mk14
28-14
DL2401Mk04p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x SparkFun Triple Axis Accelerometer Breakout - MMA7361
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x Lithium Ion Battery - 1000mAh
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Serial Peripheral Interface
#include <SPI.h>
// DS3231 Precision RTC
#include <RTClib.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Accelerometer MMA7361
int XAc = A0;
int YAc = A1;
int ZAc = A2;
// Read
int x = 0;
int y = 0;
int z = 0;
// The number of the Rocker Switch pin
int iSwitch = 21;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-14";
void loop() {
// Date and Time RTC
isRTC ();
// Accelerometer MMA7361
isMMA7361();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getAccelerometer.ino
// Accelerometer MMA7361
// isMMA7361
void isMMA7361(){
// Accelerometer Read
x = analogRead(XAc);
y = analogRead(YAc);
z = analogRead(ZAc);
sKeyboard = sKeyboard + String(x) + "|" + String(y) + "|" + String(z) + "|*";
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void isSetupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// bleKeyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC)
+ "|" + String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
isSetupRTC();
// Give display time to power on
delay(100);
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
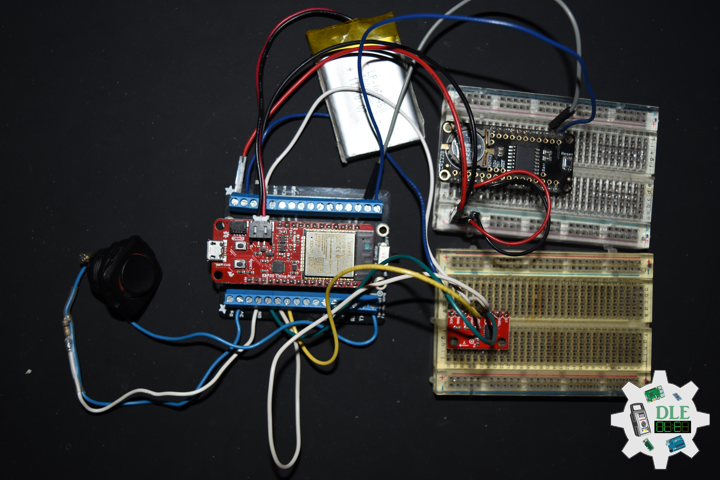
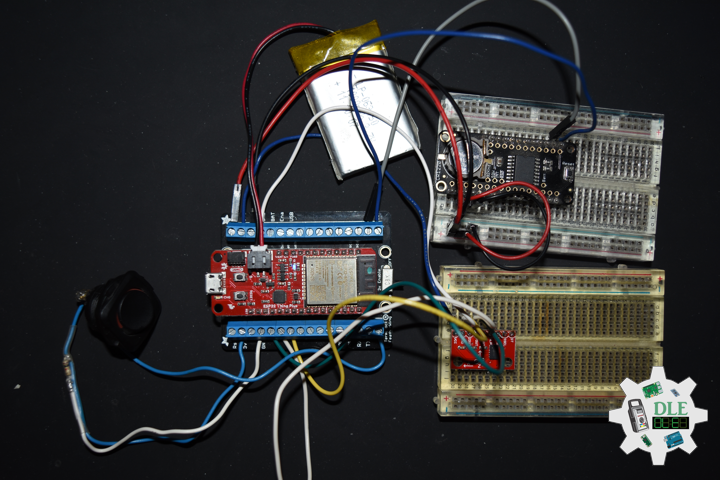
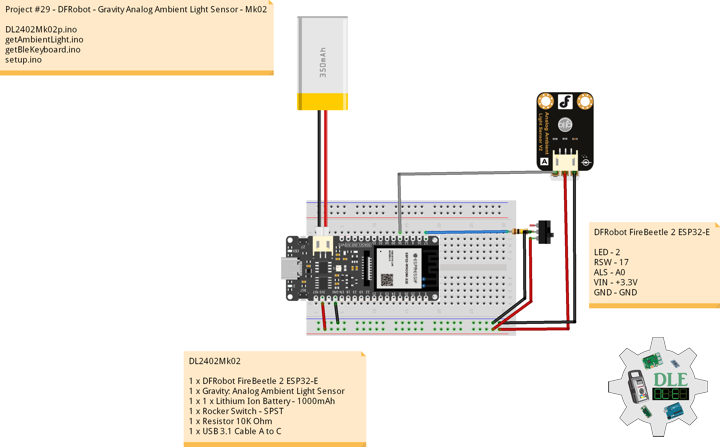
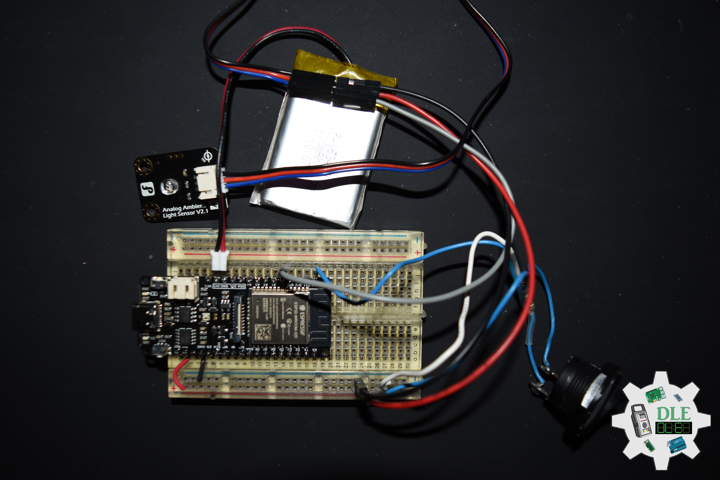
Project #29 – DFRobot – Gravity Analog Ambient Light Sensor – Mk02
——
#DonLucElectronics #DonLuc #DFRobot #AmbientLight #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
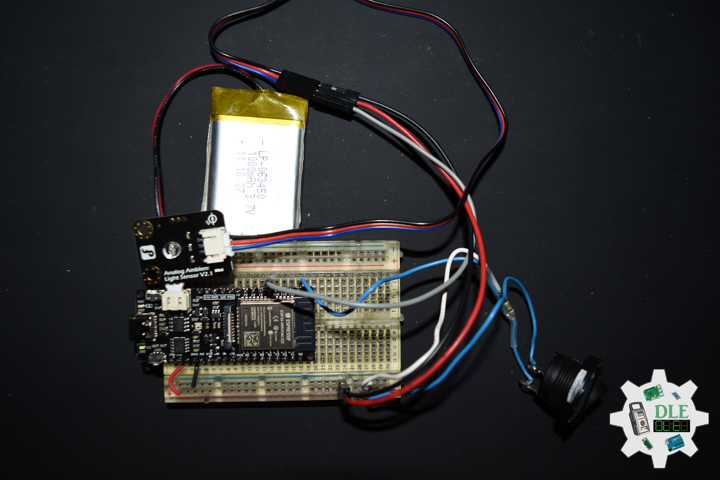
Gravity: Analog Ambient Light Sensor
This Gravity: Analog ambient light sensor can assist you in detecting light density and provide an analog voltage signal to the controller as feedback. Additionally, you have the ability to trigger other components within your project by setting voltage thresholds. This ambient light sensor is operational within the voltage range of 3.3 to 5 volts.
DL2402Mk02
1 x DFRobot FireBeetle 2 ESP32-E
1 x Gravity: Analog Ambient Light Sensor
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
ALS – A0
VIN – +3.3V
GND – GND
——
DL2402Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - FireBeetle 2 ESP32-E - Mk02
29-02
DL2402Mk02p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Gravity: Analog Ambient Light Sensor
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Gravity: Analog Ambient Light Sensor
int iAmbientLight = A0;
int iAmbientLightVal = 0;
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-02";
void loop() {
// Gravity: Analog Ambient Light Sensor
isAmbientLight();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getAmbientLight.ino
// Gravity: Analog Ambient Light Sensor
// Ambient Light
void isAmbientLight(){
// Connect Ambient Light Sensor to Analog 0
iAmbientLightVal = analogRead( iAmbientLight );
// bleKeyboard
// DFR|Version|Lux|*
sKeyboard = "DFR|" + sver + "|" + String(iAmbientLightVal) + "|*";
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
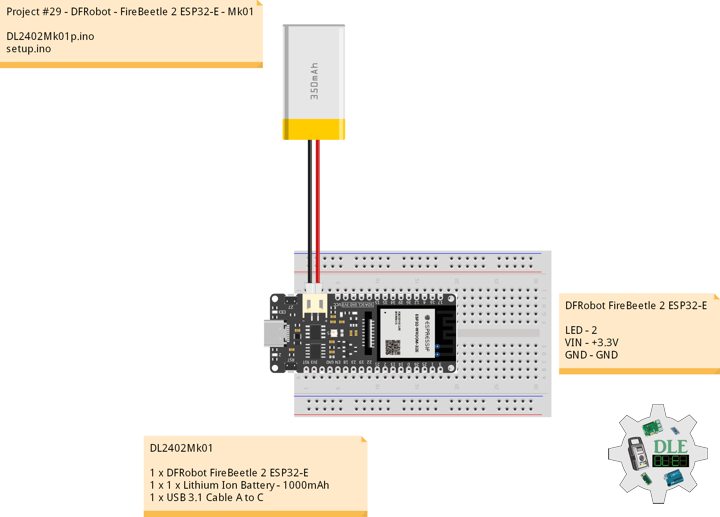
Project #29 – DFRobot – FireBeetle 2 ESP32-E – Mk01
——
#DonLucElectronics #DonLuc #DFRobot #FireBeetle2ESP32E #ESP32 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——

——
——

——
FireBeetle 2 ESP32-E
FireBeetle 2 ESP32-E, specially designed for IoT, is an ESP-WROOM-32E-based main controller board with dual-core chips. It supports WiFi and Bluetooth dual-mode communication and features a small size, ultra-low power consumption, on-board charging circuit, and easy-to-use interface, which can be conveniently used for smart home IoT, industrial IoT applications, and wearable devices, and so on. You can easily create your own IoT smart home system when connecting it with an IoT platform like IFTTT. FireBeetle 2 ESP32-E supports Arduino programming.
- Compatible with DFRobot FireBeetle V2 Series
- Small Size of 25.4 mm × 60 mm
- ESP32 Dual-core low power maincontroller, WiFi+BT4.0
- GDI Display Port, say to connect
- Onboard Charging Circuit and PH2.0 li-ion Battery Port
- Operating Voltage: 3.3 Volt
- Input Voltage: 3.3 Volt -5.5 Volt (Support USB Charging)
DL2402Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
VIN – +3.3V
GND – GND
——
DL2402Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - FireBeetle 2 ESP32-E - Mk01
29-01
DL2402Mk01p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-01";
void loop() {
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 1 Second
delay(1000);
// Outputting low, the LED turns off
digitalWrite(iLED, LOW);
// Delay 1 Second
delay(1000);
}
setup.ino
// Setup
void setup()
{
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
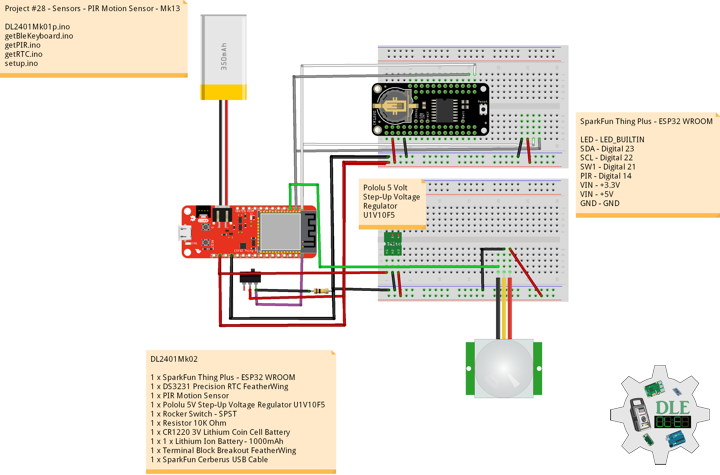
Project #28 – Sensors – PIR Motion Sensor – Mk13
——
#DonLucElectronics #DonLuc #Sensors #PIR #Adafruit #SparkFun #Pololu #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
PIR Motion Sensor (JST)
This is a simple to use motion sensor. Power it up and wait 1-2 seconds for the sensor to get a snapshot of the still room. If anything moves after that period, the “Alarm” pin will go low. This unit works great from 5 to 12 Volt. The alarm pin is an open collector meaning you will need a pull up resistor on the alarm pin. The open drain setup allows multiple motion sensors to be connected on a single input pin. If any of the motion sensors go off, the input pin will be pulled low.
At their most fundamental level, PIR sensor’s are infrared-sensitive light detectors. By monitoring light in the infrared spectrum, PIR sensors can sense subtle changes in temperature across the area they’re viewing. When a human or some other object comes into the PIR’s field-of-view, the radiation pattern changes, and the PIR interprets that change as movement. All that’s left for us to connect is three pins: power, ground, and the output signal.
DL2401Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x PIR Motion Sensor
1 x Pololu 5V Step-Up Voltage Regulator U1V10F5
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
SW1 – Digital 21
PIR – Digital 14
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2401Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - PIR Motion Sensor - Mk13
28-13
DL2401Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x PIR Motion Sensor
1 x Pololu 5V Step-Up Voltage Regulator U1V10F5
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x Lithium Ion Battery - 1000mAh
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Serial Peripheral Interface
#include <SPI.h>
// DS3231 Precision RTC
#include <RTClib.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// PIR Motion
// Motion detector
const int iMotion = 14;
// Proximity
int proximity = LOW;
String Det = "";
// The number of the Rocker Switch pin
int iSwitch = 21;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-13";
void loop() {
// Date and Time RTC
isRTC ();
// isPIR Motion
isPIR();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
}
sKeyboard = sKeyboard + String(Det) + "|*";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void isSetupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// bleKeyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC)
+ "|" + String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
isSetupRTC();
// Give display time to power on
delay(100);
// PIR Motion
// Setup PIR
setupPIR();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
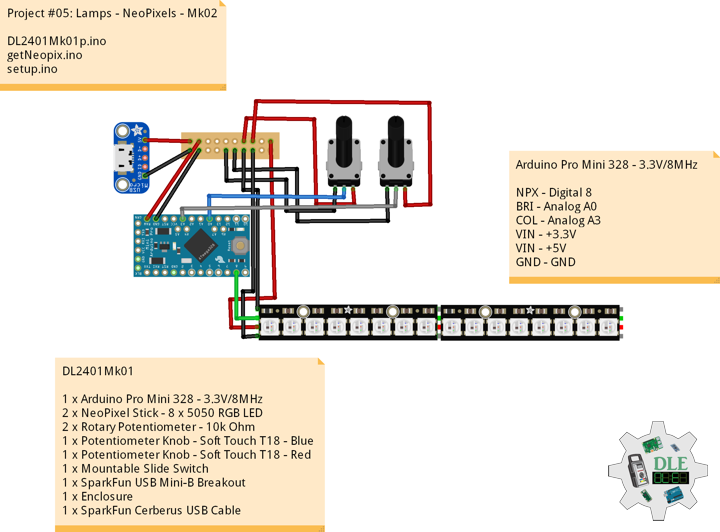
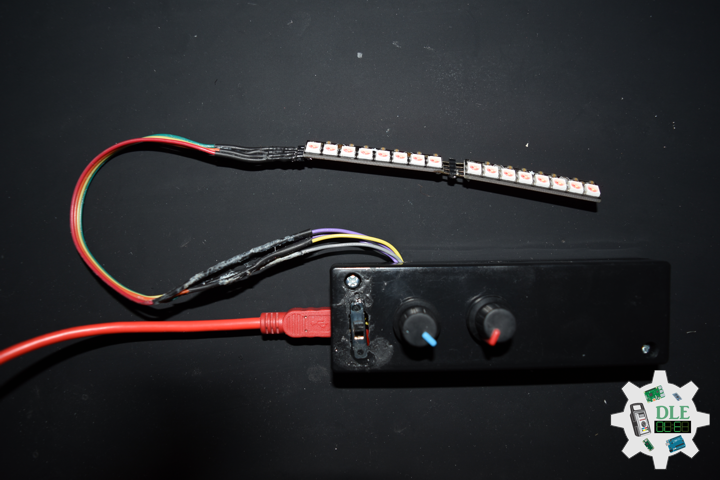
Project #05: Lamps – NeoPixels – Mk02
——
#DonLucElectronics #DonLuc #Lamps #NeoPixels #Keyboard #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——

——
NeoPixels
The WS2812 Integrated Light Source, or NeoPixel in Adafruit parlance, is the latest advance in the quest for a simple, scalable and affordable full-color LED. Red, green and blue LEDs are integrated alongside a driver chip into a tiny surface-mount package controlled through a single wire. They can be used individually, chained into longer strings or assembled into still more interesting form-factors.
NeoPixels don’t just light up on their own; they require a microcontroller, such as Arduino, and some programming. We provide some sample code to get you started. To create your own effects and animation, you’ll need some programming practice. If this is a new experience, work through some of the beginning Arduino tutorials to get a feel for the language.
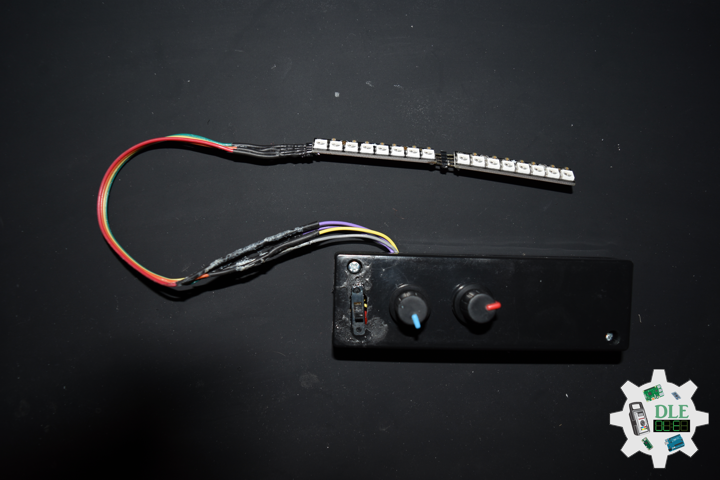
NeoPixel Stick – 8 x 5050 RGB LED
Make your own little LED strip arrangement with this stick of NeoPixel LEDs. We crammed 8 of the tiny 5050 smart RGB LEDs onto a PCB with mounting holes and a chainable design. Use only one microcontroller pin to control as many as you can chain together. Each LED is addressable as the driver chip is inside the LED. Each one has constant current drive so the color will be very consistent even if the voltage varies, and no external choke resistors are required making the design slim. Power the whole thing with 5VDC and you’re ready to rock. The LEDs are “Chainable” by connecting the output of one stick into the input of another. There is a single data line with a very timing-specific protocol.
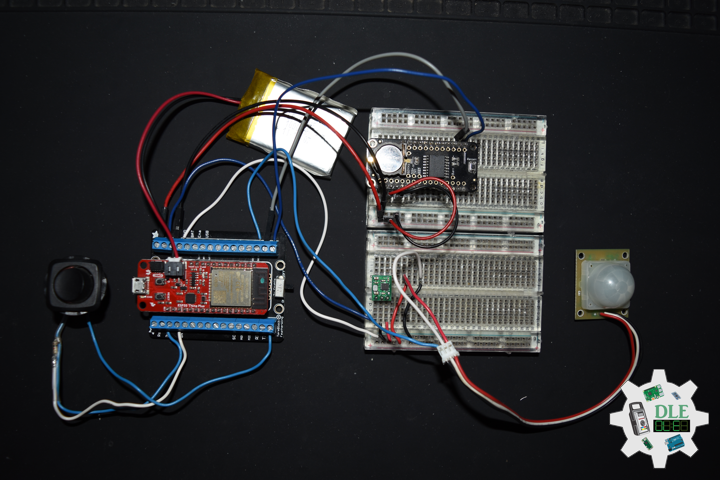
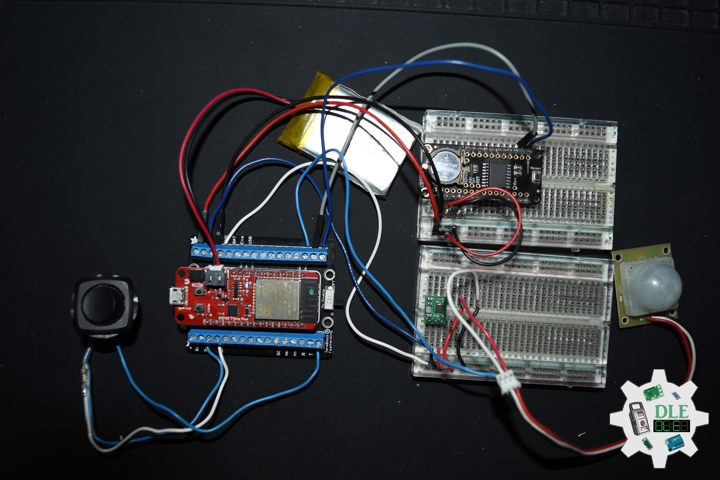
DL2401Mk01
1 x Arduino Pro Mini 328 – 3.3V/8MHz
2 x NeoPixel Stick – 8 x 5050 RGB LED
2 x Rotary Potentiometer – 10k Ohm
1 x Potentiometer Knob – Soft Touch T18 – Blue
1 x Potentiometer Knob – Soft Touch T18 – Red
1 x Mountable Slide Switch
1 x SparkFun USB Mini-B Breakout
1 x Enclosure
1 x SparkFun Cerberus USB Cable
Arduino Pro Mini 328 – 3.3V/8MHz
NPX – Digital 8
BRI – Analog A0
COL – Analog A3
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2401Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #05: Lamps - NeoPixels - Mk02
05-02
DL2401Mk01p.ino
1 x Arduino Pro Mini 328 - 3.3V/8MHz
2 x NeoPixel Stick - 8 x 5050 RGB LED
2 x Rotary Potentiometer - 10k Ohm
1 x Potentiometer Knob - Soft Touch T18 - Blue
1 x Potentiometer Knob - Soft Touch T18 - Red
1 x Mountable Slide Switch
1 x SparkFun USB Mini-B Breakout
1 x Enclosure
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// NeoPixel
#include <Adafruit_NeoPixel.h>
// NeoPixels
#define PIN 8
// How many NeoPixels are attached to the Arduino => 16
#define NUMPIXELS 16
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Color
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// 2 x Panel Mount 1K potentiometer
// Brighten
const int iSensorBrighten = A0;
int BrightenValue = 0;
int sensorMin = 1023; // minimum sensor value
int sensorMax = 0; // maximum sensor value
// Color
const int iSensorColor = A3;
int y = 0;
int ColorVal = 0;
// Software Version Information
String sver = "05-02";
void loop() {
// Color
isRangeColor();
// Brighten
isNeopix();
}
getNeopix.ino
// Neopix
void isNeopix() {
for(int i=0; i<NUMPIXELS; i++){
// Neopix
BrightenValue = analogRead( iSensorBrighten );
// Apply the calibration to the sensor reading
BrightenValue = map(BrightenValue, sensorMin, sensorMax, 0, 255);
// In case the sensor value is outside the range seen during calibration
BrightenValue = constrain(BrightenValue, 0, 255);
pixels.setBrightness( BrightenValue );
// The pixels.Color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor(i, pixels.Color(red,green,blue));
// This sends the updated pixel color to the hardware
pixels.show();
}
}
// Range Color
void isRangeColor() {
// Range Color
ColorVal = analogRead( iSensorColor );
y = (ColorVal / 127);
switch ( y ) {
case 0:
// White
red = 255;
green = 255;
blue = 255;
break;
case 1:
// Yellow
red = 255;
green = 255;
blue = 0;
isNeopix();
break;
case 2:
// Pink
red = 255;
green = 153;
blue = 203;
isNeopix();
break;
case 3:
// Blue
red = 0;
green = 102;
blue = 204;
isNeopix();
isNeopix();
break;
case 4:
// Green
red = 0;
green = 255;
blue = 0;
isNeopix();
break;
case 5:
// Orange
red = 255;
green = 102;
blue = 0;
isNeopix();
break;
case 6:
// Violet
red = 204;
green = 102;
blue = 204;
isNeopix();
break;
case 7:
// Red
red = 255;
green = 0;
blue = 0;
isNeopix();
break;
}
}
setup.ino
// Setup
void setup()
{
// This initializes the NeoPixel library
pixels.begin();
delay(50);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc