——
#DonLucElectronics #DonLuc #DFRobot #Smoke #CH4 #VOC #SHTC3 #SD #FireBeetle2ESP32E #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Adafruit MicroSD card breakout board+
Not just a simple breakout board, this microSD adapter goes the extra mile, designed for ease of use.
- Onboard 5 Volt -> 3 Volt regulator provides 150mA for power-hungry cards
- 3 Volt level shifting means you can use this with ease on either 3 Volt or 5 Volt systems
- Uses a proper level shifting chip, not resistors: less problems, and faster read/write access
- Use 3 or 4 digital pins to read and write 2Gb+ of storage
- Activity LED lights up when the SD card is being read or written
- Four #2 mounting holes
- Push-push socket with card slightly over the edge of the PCB so its easy to insert and remove
- Comes with 0.1″ header, unattached, so you can get it on a breadboard or use wires, your choice
- Tested and assembled here at the Adafruit factory
- Works great with Arduino, with tons of example code and wiring diagrams
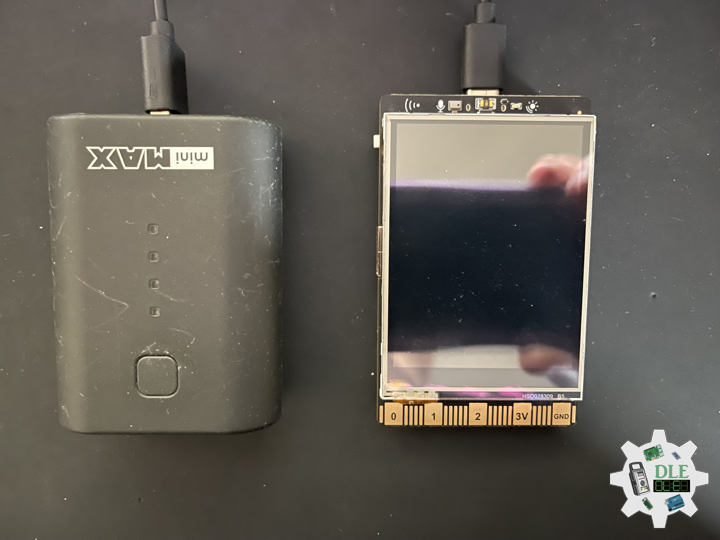
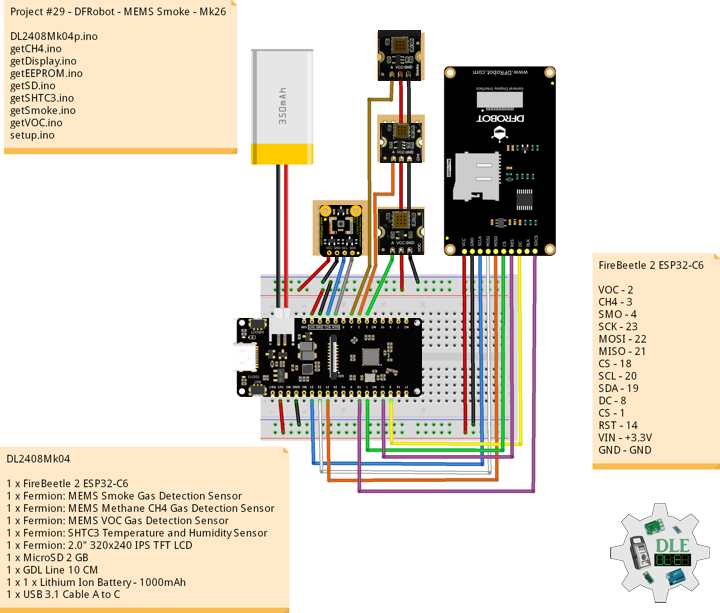
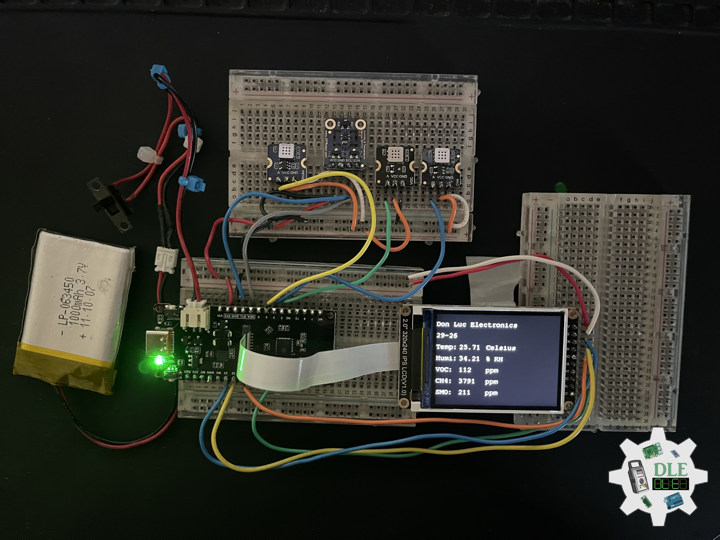
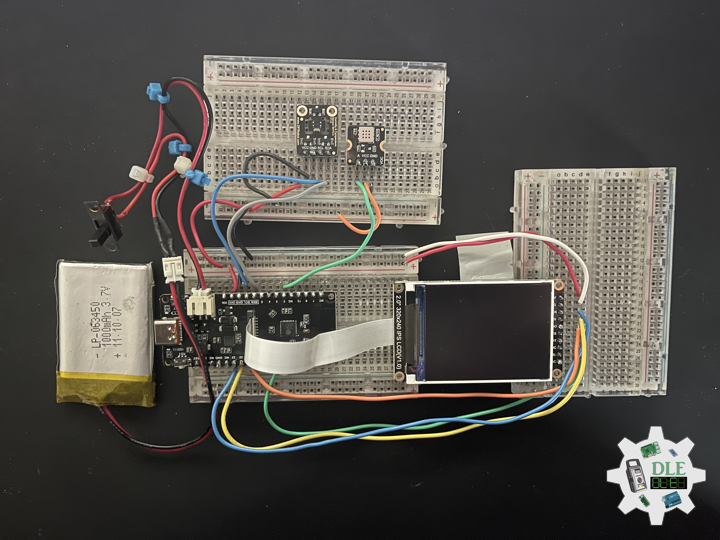
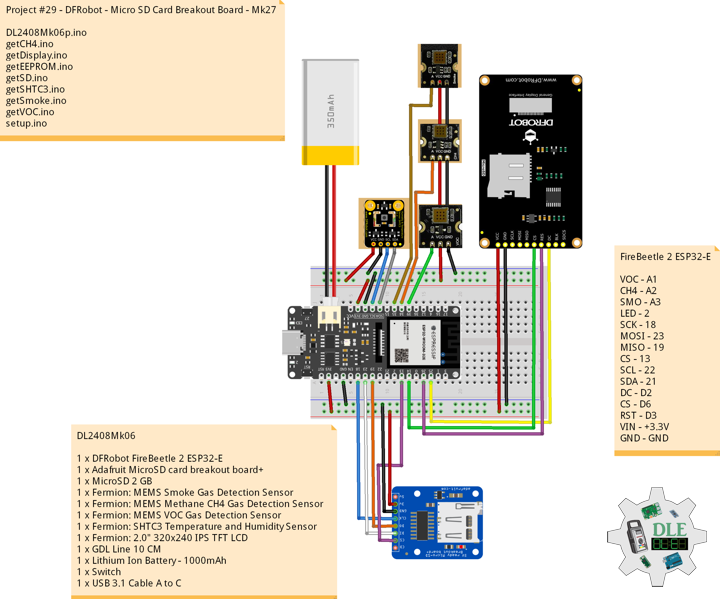
DL2408Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 2 GB
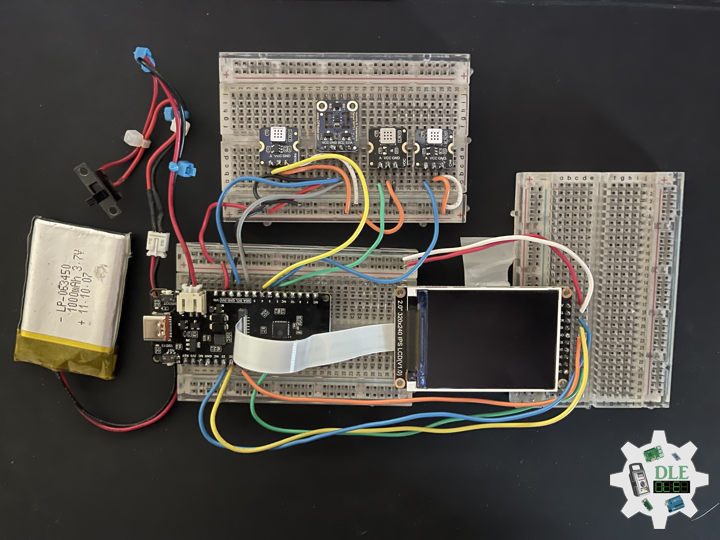
1 x Fermion: MEMS Smoke Gas Detection Sensor
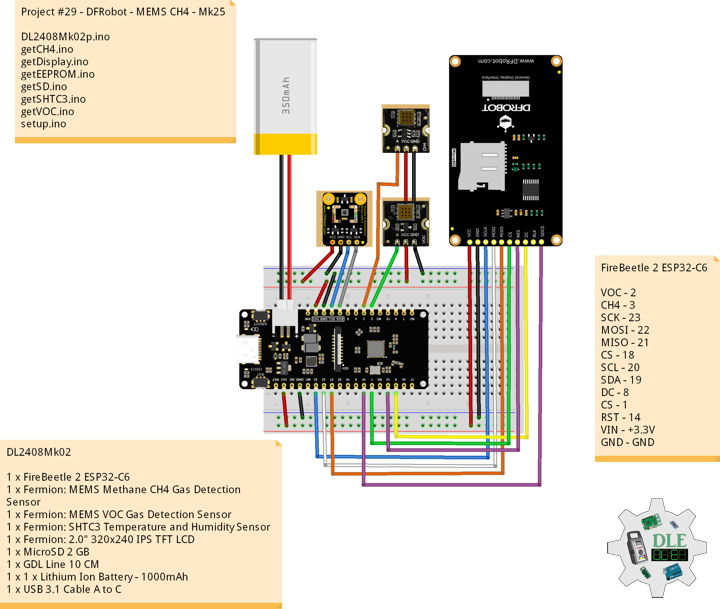
1 x Fermion: MEMS Methane CH4 Gas Detection Sensor
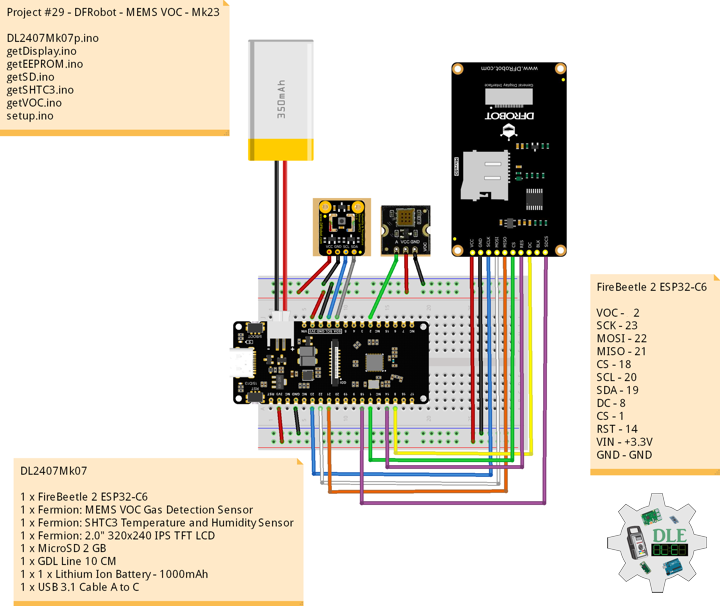
1 x Fermion: MEMS VOC Gas Detection Sensor
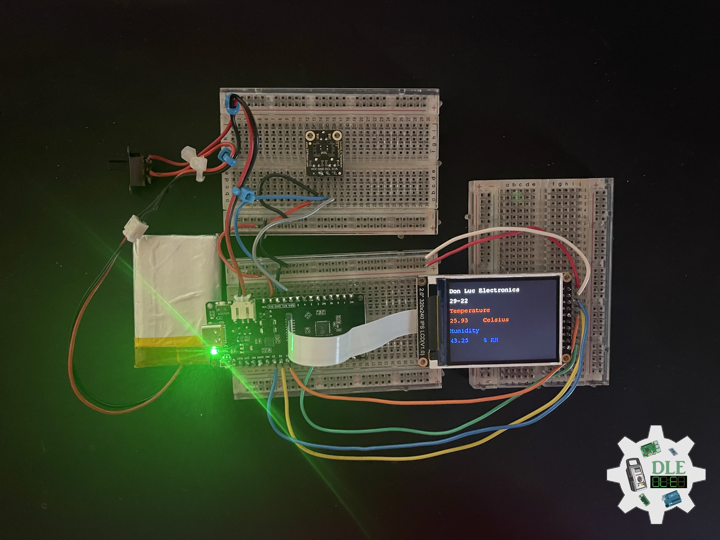
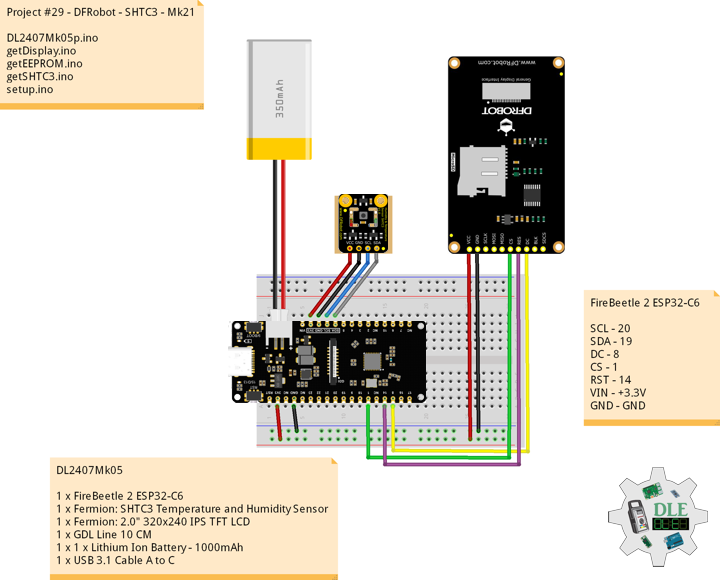
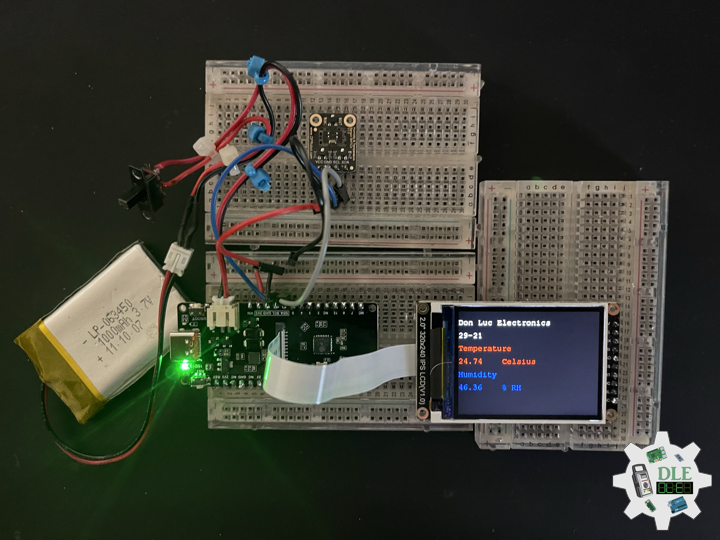
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
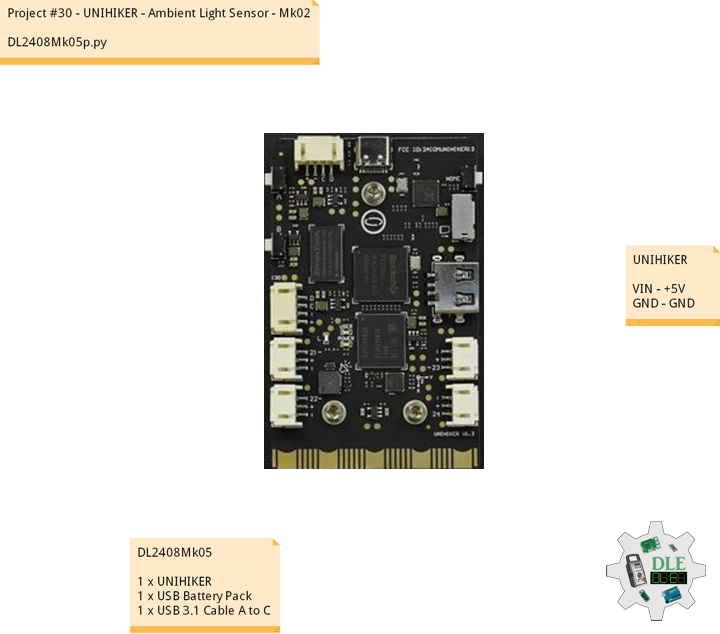
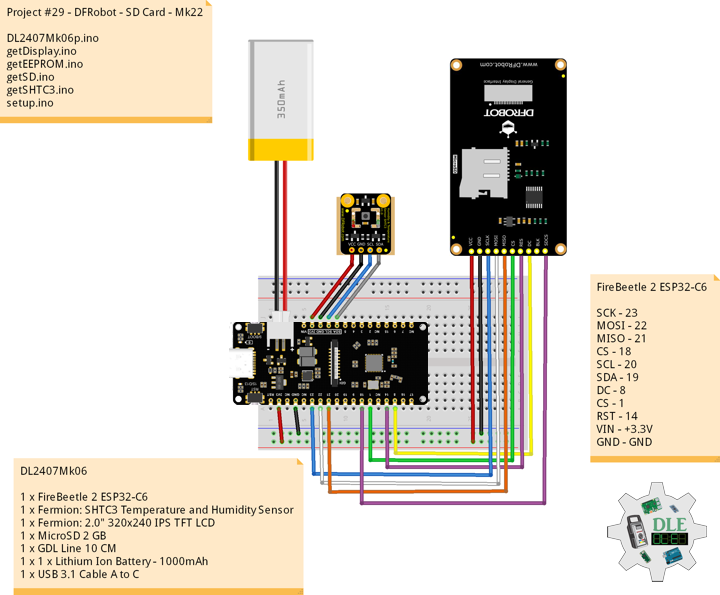
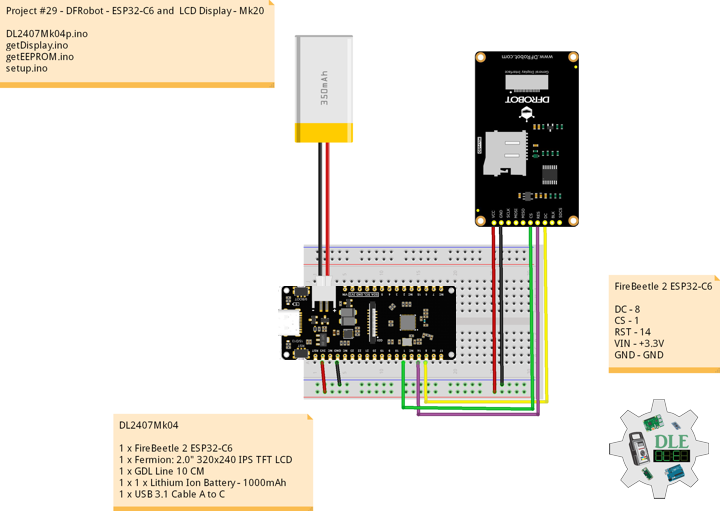
FireBeetle 2 ESP32-E
VOC – A1
CH4 – A2
SMO – A3
LED – 2
SCK – 18
MOSI – 23
MISO – 19
CS – 13
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
VIN – +3.3V
GND – GND
DL2408Mk06p
DL2408Mk06p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Micro SD Card Breakout Board - Mk27
29-27
DL2408Mk06p.ino
DL2408Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 2 GB
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: MEMS Methane CH4 Gas Detection Sensor
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// SHTC3 Temperature and Humidity Sensor
#include "SHTSensor.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// MEMS Smoke Gas
int iSensorSmoke = A3;
int iSensorValueSmoke = 0;
int z = 0;
// MEMS CH4 Gas
int iSensorCH4 = A2;
int iSensorValueCH4 = 0;
int y = 0;
// MEMS VOC Gas
int iSensorVOC = A1;
int iSensorValueVOC = 0;
int x = 0;
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHTC3 Temperature and Humidity Sensor
SHTSensor sht;
// Temperature
float T;
// Humidity
float H;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// LED Green
int iLEDGreen = 2;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-27";
void loop() {
// MEMS Smoke Gas
isSmoke();
// MEMS CH4 Gas
isCH4();
// MEMS VOC Gas
isVOC();
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
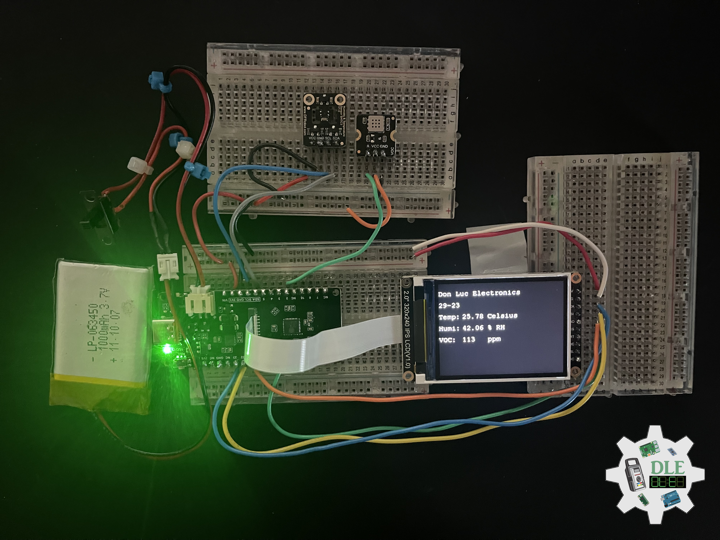
// DFRobot Display 240x320 - Temperature and Humidity, VOC, CH4, Smoke
isDisplayTH();
// MicroSD Card
isSD();
// Delay 5 Second
delay( 5000 );
}
getCH4.ino
// MEMS CH4 Gas
// is CH4
void isCH4(){
// MEMS CH4 Gas
y = analogRead( iSensorCH4 );
iSensorValueCH4 = map(y, 1, 4095, 1, 10000);
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
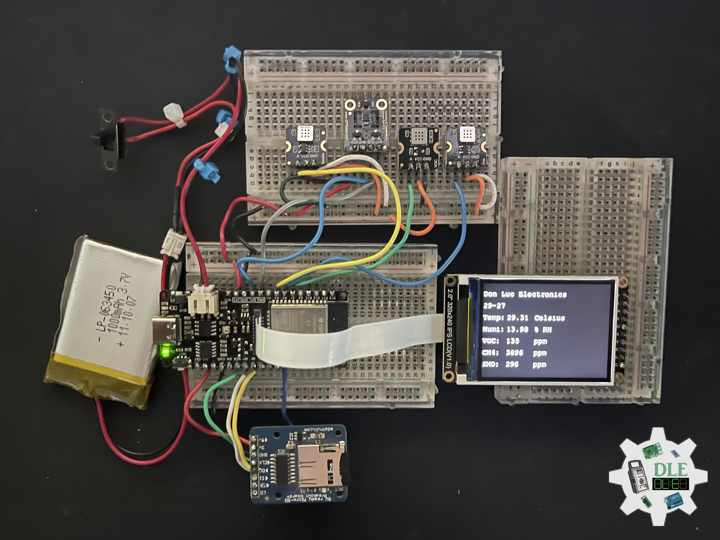
// DFRobot Display 240x320 - Temperature and Humidity, VOC, CH4, Smoke
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
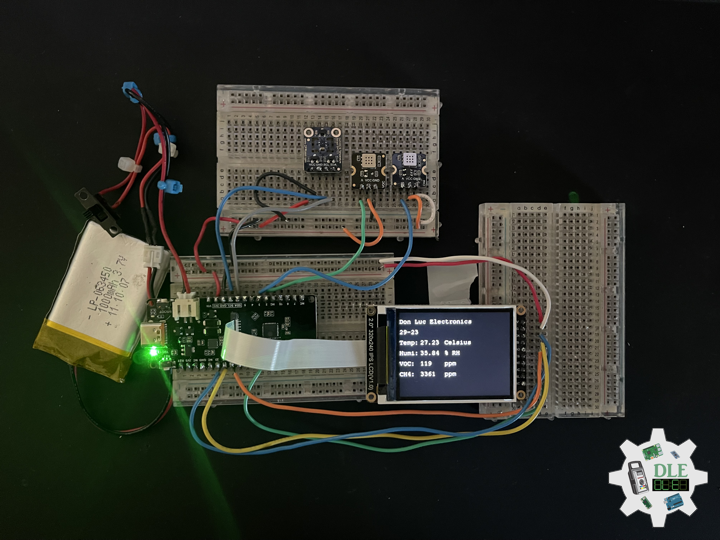
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 60);
screen.println( sver );
// Temperature
screen.setCursor(0, 90);
screen.println( "Temp: " );
screen.setCursor(60, 90);
screen.println( T );
screen.setCursor(130, 90);
screen.println("Celsius");
// Humidity
screen.setCursor(0, 120);
screen.println("Humi: ");
screen.setCursor(60, 120);
screen.println( H );
screen.setCursor(130, 120);
screen.println("% RH");
// MEMS VOC Gas
screen.setCursor(0, 150);
screen.println( "VOC: " );
screen.setCursor(60, 150);
screen.println( iSensorValueVOC );
screen.setCursor(130, 150);
screen.println("ppm");
// MEMS CH4 Gas
screen.setCursor(0, 180);
screen.println( "CH4: " );
screen.setCursor(60, 180);
screen.println( iSensorValueCH4 );
screen.setCursor(130, 180);
screen.println("ppm");
// MEMS Smoke Gas
screen.setCursor(0, 210);
screen.println( "SMO: " );
screen.setCursor(60, 210);
screen.println( iSensorValueSmoke );
screen.setCursor(130, 210);
screen.println("ppm");
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Temperature C|% RH|VOC|CH4|Smoke|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String( T ) + "|" + String( H ) + "|"
+ String( iSensorValueVOC ) + "|" + String( iSensorValueCH4 ) + "|"
+ String( iSensorValueSmoke ) + "|*\r";;
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
if (sht.readSample()) {
// Temperature
T = sht.getTemperature();
// Humidity
H = sht.getHumidity();
}
}
getSmoke.ino
// Smoke
// isSmoke
void isSmoke(){
// MEMS Smoke Gas
z = analogRead( iSensorSmoke );
iSensorValueSmoke = map(x, 1, 4095, 1, 1000);
}
getVOC.ino
// MEMS VOC Gas
// is VOC
void isVOC(){
// MEMS VOC Gas
x = analogRead( iSensorVOC );
iSensorValueVOC = map(x, 1, 4095, 1, 500);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// SHTC3 Temperature and Humidity Sensor
sht.init();
// SHT3x
sht.setAccuracy(SHTSensor::SHT_ACCURACY_MEDIUM);
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// MicroSD Card
isSetupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot Luc.Paquin: https://edu.dfrobot.com/dashboard/makelogs
Hackster.io: https://www.hackster.io/neosteam-labs
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc