——
#DonLucElectronics #DonLuc #GasSensorMQ3 #Arduino #EEPROM #Display #Elecrow #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
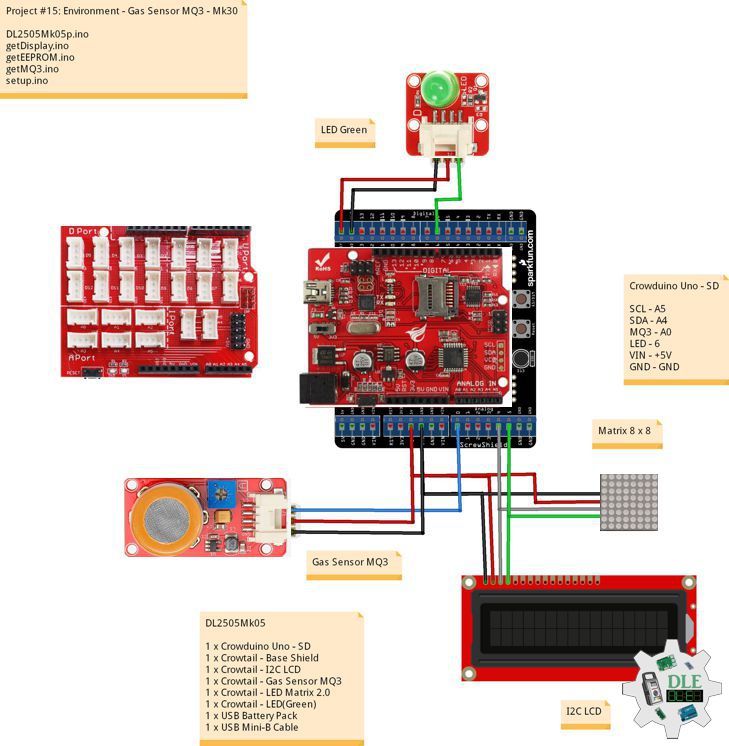
Crowtail – Gas Sensor MQ3
The module contains a MQ-3 Gas Sensor and ETA1036. High sensitivity to alcohol and small sensitivity to benzine with a stable and long worklife are most important reasons to choose the MQ-3. The ETA1036 is a high efficiency synchronous step-up converter that can provide up to 3W of power to a boosted output from a low voltage source. The start-up voltage requires only 0.85v and the efficiency up to 96%. The MQ-3 is useful for alcohol detecting.
Crowtail – LED Matrix 2.0 – (Red)
A 8×8 LED matrix has lots of applications when we DIY some electronic kit. So we this Crowtail- 8×8 LED Matrix use the HT16K33 which is a neat little chip that has the ability to drive a multiplexed 8×8 matrix. The I2C communication protocol uses only 2 pins, and you can have up to 8 selectable I2C addresses so that a total of 8 matrices, each one controlling 8×8 LEDs for 64 total LEDs.
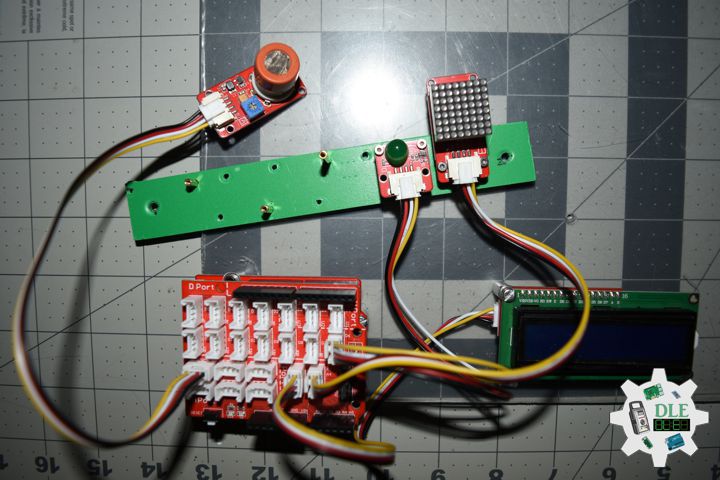
DL2505Mk05
1 x Crowduino Uno – SD
1 x Crowtail – Base Shield
1 x Crowtail – I2C LCD
1 x Crowtail – Gas Sensor MQ3
1 x Crowtail – LED Matrix 2.0
1 x Crowtail – LED(Green)
1 x USB Battery Pack
1 x USB Mini-B Cable
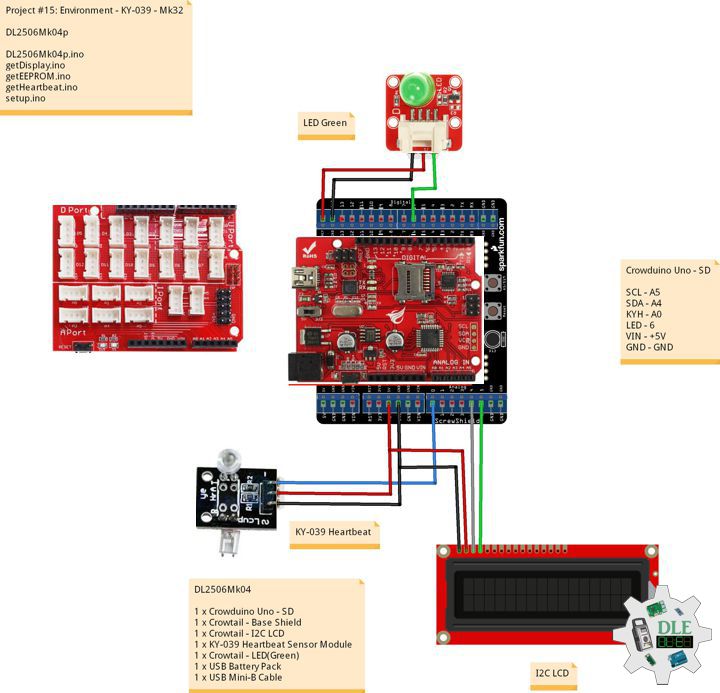
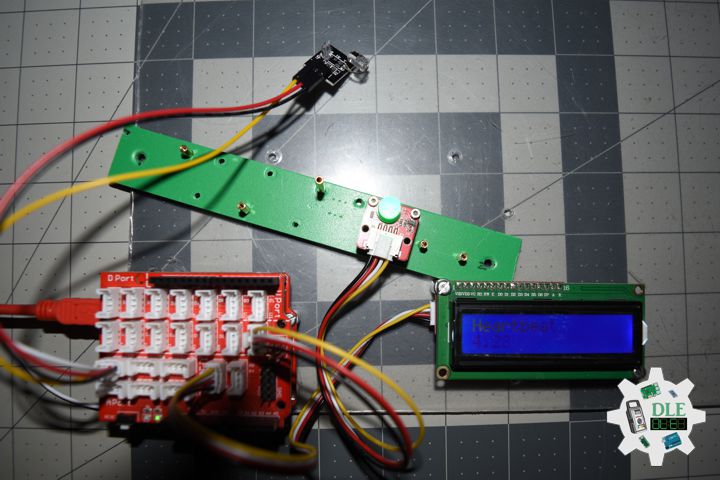
Crowduino Uno – SD
SCL – A5
SDA – A4
MQ3 – A0
LED – 6
VIN – +5V
GND – GND
DL2505Mk05p
DL2505Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
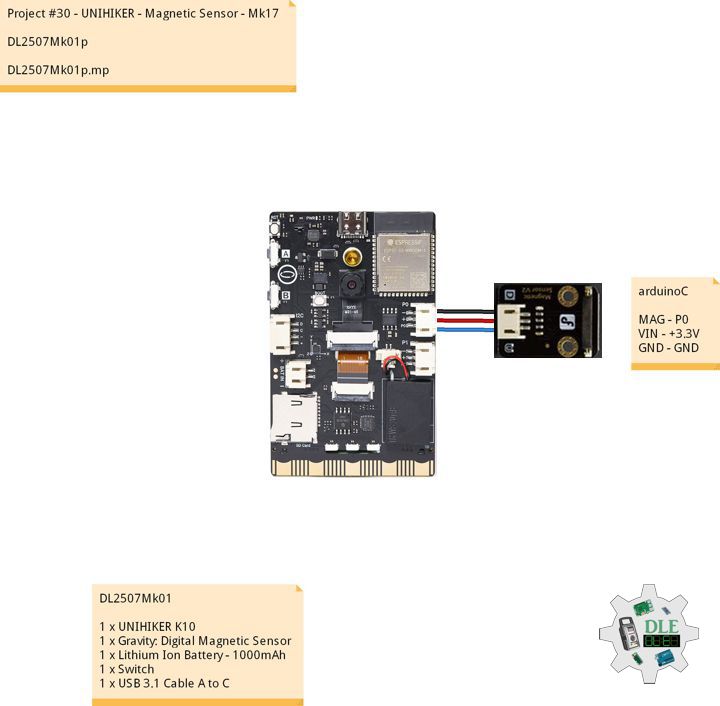
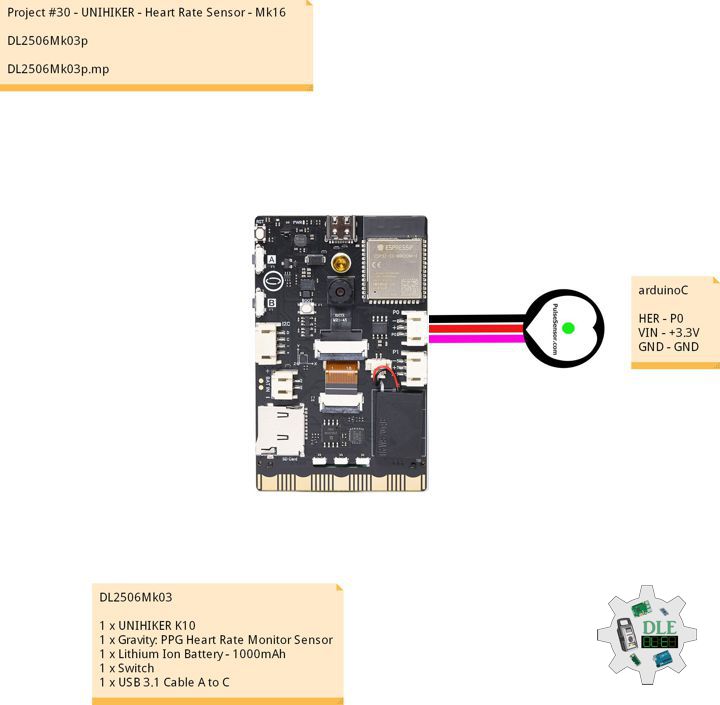
Project #15: Environment - Gas Sensor MQ3 - Mk30
DL2505Mk05p.ino
DL2505Mk05
1 x Crowduino Uno - SD
1 x Crowtail - Base Shield
1 x Crowtail - I2C LCD
1 x Crowtail - Gas Sensor MQ3
1 x Crowtail - LED Matrix 2.0
1 x Crowtail - LED(Green)
1 x USB Battery Pack
1 x USB Mini-B Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Wire
#include <Wire.h>
// Liquid Crystal
#include "LiquidCrystal.h"
// Matrix Adafruit LED Backpack
#include "Adafruit_LEDBackpack.h"
// 8x8 Matrix
Adafruit_8x8matrix matrix = Adafruit_8x8matrix();
// BMP
static const uint8_t PROGMEM
smile_bmp[] =
{ B00111100,
B01000010,
B10100101,
B10000001,
B10100101,
B10011001,
B01000010,
B00111100 },
neutral_bmp[] =
{ B00111100,
B01000010,
B10100101,
B10000001,
B10111101,
B10000001,
B01000010,
B00111100 },
frown_bmp[] =
{ B00111100,
B01000010,
B10100101,
B10000001,
B10011001,
B10100101,
B01000010,
B00111100 };
// MQ3 Alcohol
int iMQ3Alcohol = A0;
// MQ3 Value
float MQ3Value;
// Sober
#define Sober 120
// Drunk
#define Drunk 400
// Liquid Crystal
// Connect via i2c
LiquidCrystal lcd(0);
// LED Green
int iLEDGreen = 6;
// EEPROM Unique ID Information
String uid = "";
// Software Version Information
String sver = "15-30";
void loop() {
// MQ3 Alcohol
// isMQ3
isMQ3();
// Display Alcohol
isDisplayAlcohol();
// Delay
delay( 2000 );
}
getDisplay.ino
// getDisplay
// Crowbits - OLED 128X64 UID
// Display UID
void isDisplayUID(){
// Set up the LCD's number of rows and columns:
lcd.begin(16, 2);
// Print a message to the LCD.
// Cursor
lcd.setCursor(0, 0);
lcd.print("Don Luc Electron");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print( sver );
}
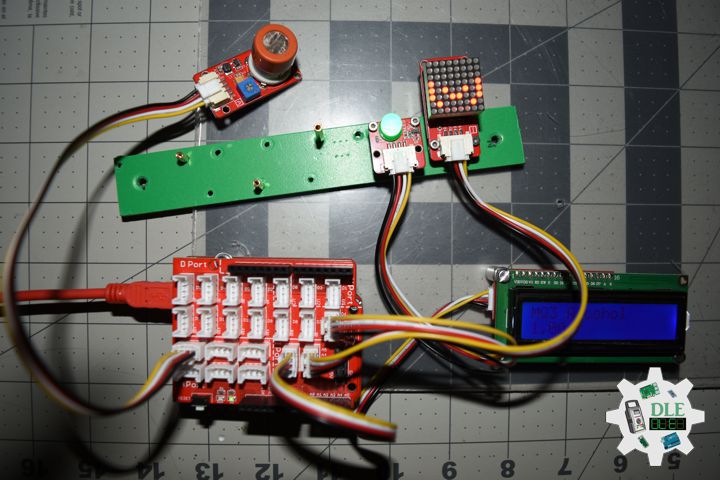
// Display Alcohol
void isDisplayAlcohol(){
// Clear
lcd.clear();
// Set the cursor to column 0, line 0
lcd.setCursor(0, 0);
lcd.print( "MQ3 Alcohol" );
// Set the cursor to column 0, line 1
lcd.setCursor(0, 1);
lcd.print( MQ3Value );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getMQ3.ino
// MQ3 Alcohol
// isMQ3
void isMQ3(){
// MQ3 Alcohol
MQ3Value = digitalRead(iMQ3Alcohol);
// Determine the status
if (MQ3Value < Sober) {
// Smile
matrix.clear();
matrix.drawBitmap(0, 0, smile_bmp, 8, 8, LED_ON);
matrix.writeDisplay();
} else if (MQ3Value >= Sober && MQ3Value < Drunk) {
// Neutral
matrix.clear();
matrix.drawBitmap(0, 0, neutral_bmp, 8, 8, LED_ON);
matrix.writeDisplay();
} else {
// DRUNK
matrix.clear();
matrix.drawBitmap(0, 0, frown_bmp, 8, 8, LED_ON);
matrix.writeDisplay();
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// isUID EEPROM Unique ID
isUID();
// Delay
delay(100);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// LED Green
digitalWrite(iLEDGreen, HIGH);
// Delay
delay(100);
// 8x8 Matrix
matrix.begin(0x70);
// Smile
matrix.drawBitmap(0, 0, smile_bmp, 8, 8, LED_ON);
matrix.writeDisplay();
// Delay
delay( 100 );
// Display UID
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc