——
#DonLucElectroniRcs #DonLuc #HeartRate #UNIHIKER #Display #IoT #Project #DFRobot #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
—–
——
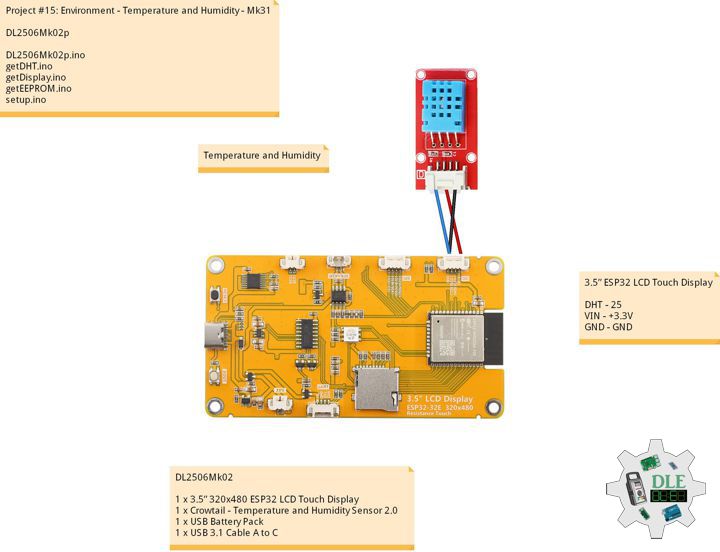
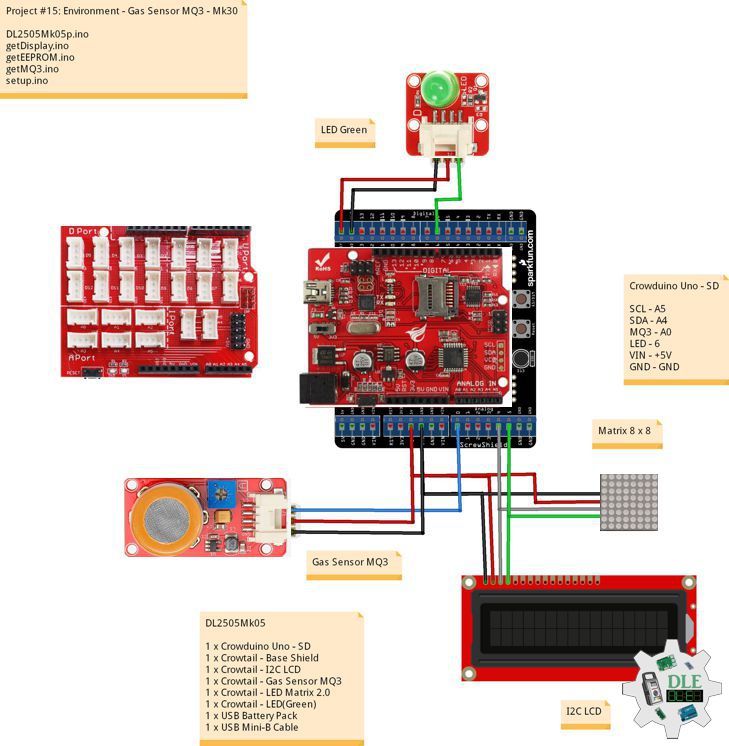
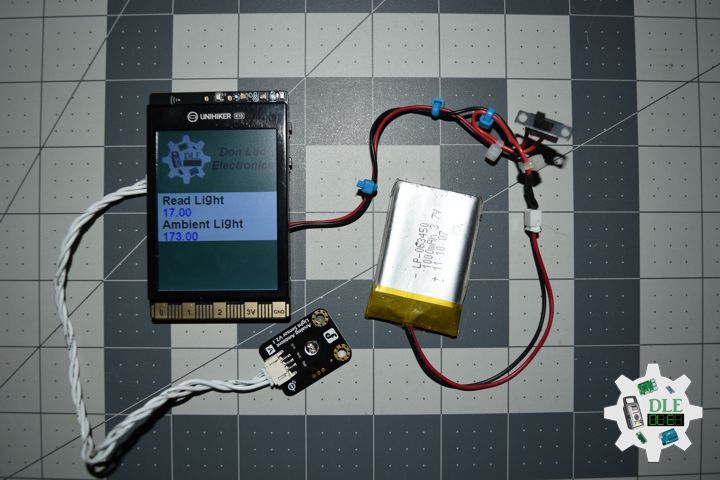
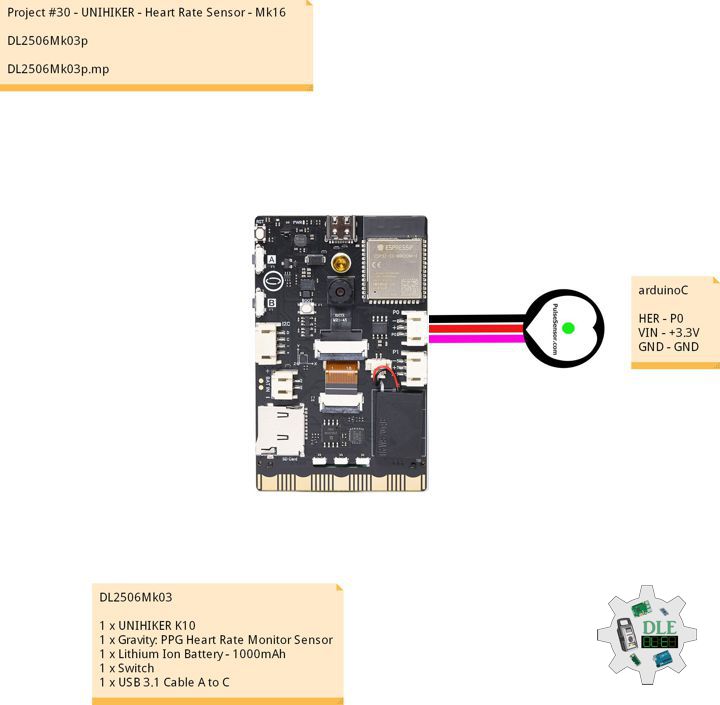
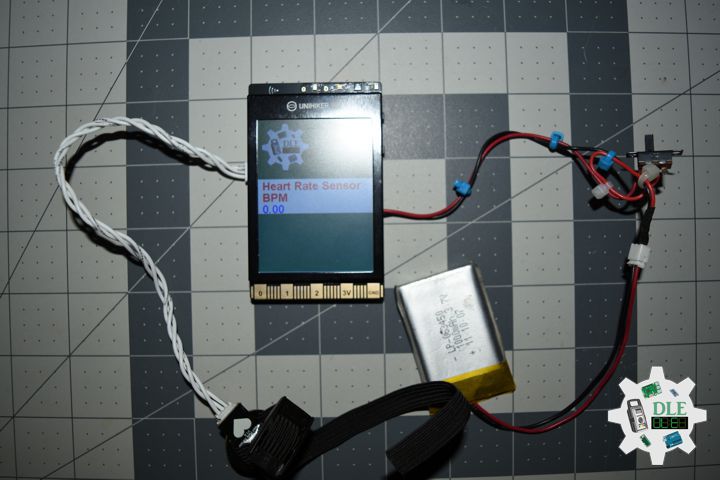
Heart Rate Sensor
The DFRobot heart rate sensor is a thumb-sized heart rate monitor designed for microcontrollers. It includes a Gravity interface, for easy plug-and-play connectivity. This sensor is a pulse sensor which is developed based on PPG (PhotoPlethysmoGraphy) techniques. This is a simple and low-cost optical technique that can be used to detect blood volume changes in the microvascular bed of tissues. It is relatively easy to detect the pulsatile component of the cardiac cycle according to this theory. The sensor has two holes that you can use to attach to your belt. You can wrap on your finger, wrist, earlobe or other areas where it has contact with skin. The heart sensor has two kinds of signal output mode: analog pulse mode and digital square wave mode. You can change its output mode using the dial switch. There are many user scenarios, including education, sports or maker/interactive projects.
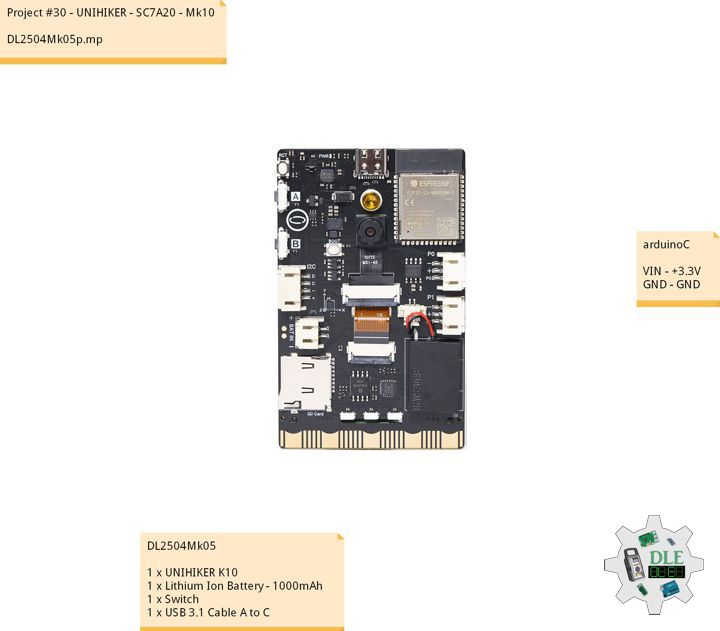
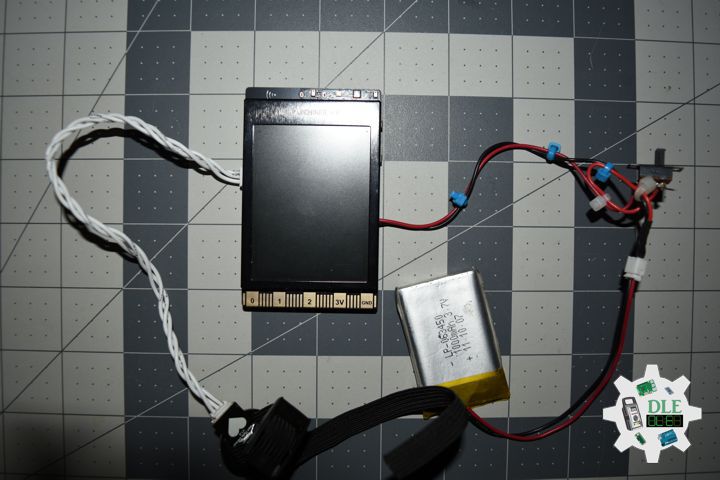
DL2506Mk03
1 x UNIHIKER K10
1 x Gravity: PPG Heart Rate Monitor Sensor
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
DL2506Mk03p
DL2506Mk03p.mp
/****** Don Luc Electronics © ******
Software Version Information
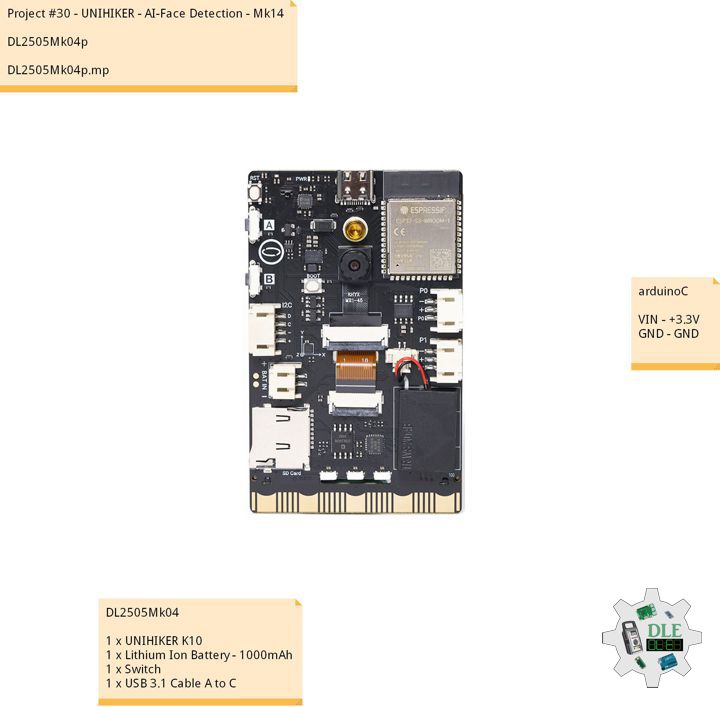
Project #30 - UNIHIKER - Heart Rate Sensor - Mk16
DL2506Mk03p.mp
DL2506Mk03
1 x UNIHIKER K10
1 x Gravity: PPG Heart Rate Monitor Sensor
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Unihiker K10
#include "unihiker_k10.h"
// Gravity: PPG Heart Rate Monitor Sensor
#include <DFRobot_Heartrate.h>
// Create an object
UNIHIKER_K10 k10;
// Screen
uint8_t screen_dir=2;
// Gravity: PPG Heart Rate Monitor Sensor
DFRobot_Heartrate heartrate;
// Main program start
void setup() {
// Begin
k10.begin();
// Init Screen
k10.initScreen(screen_dir);
// Canver
k10.creatCanvas();
// Gravity: PPG Heart Rate Monitor Sensor
heartrate.begin(DIGITAL_MODE);
// Image
k10.canvas->canvasDrawBitmap(0,0,240,320,image_data1);
}
// Loop
void loop() {
// Heart Rate Senso
k10.canvas->canvasText("Heart Rate Sensor", 6, 0xFF0000);
// BPM
k10.canvas->canvasText("BPM", 7, 0xFF0000);
// Heart Rate
k10.canvas->canvasText(heartrate.getRate(P0), 8, 0x0000FF);
// Update Canvas
k10.canvas->updateCanvas();
}
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc