——
#DonLucElectronics #DonLuc #Barometer #SparkFunESP32WROOM #ESP32 #Display #IoT #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
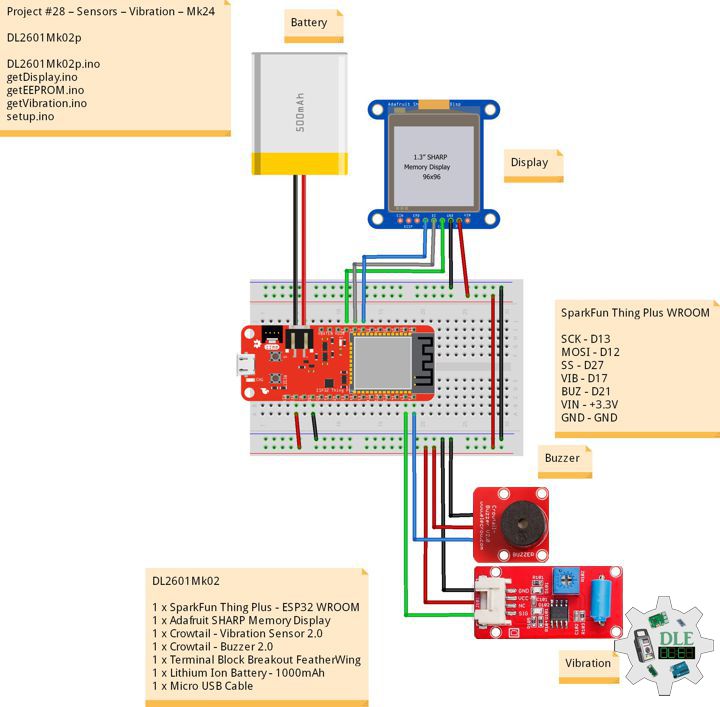
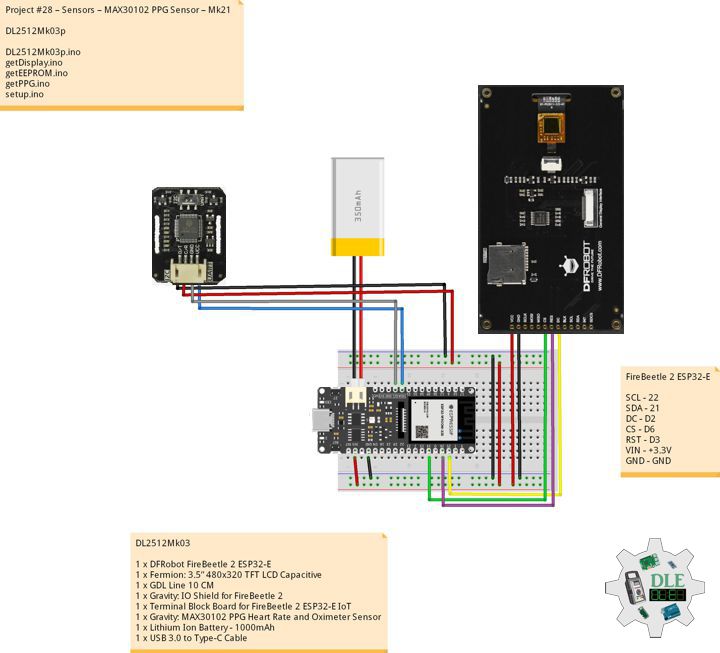
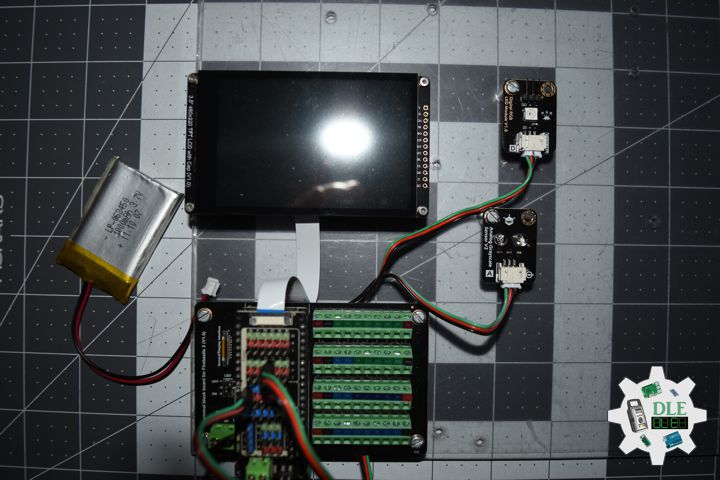
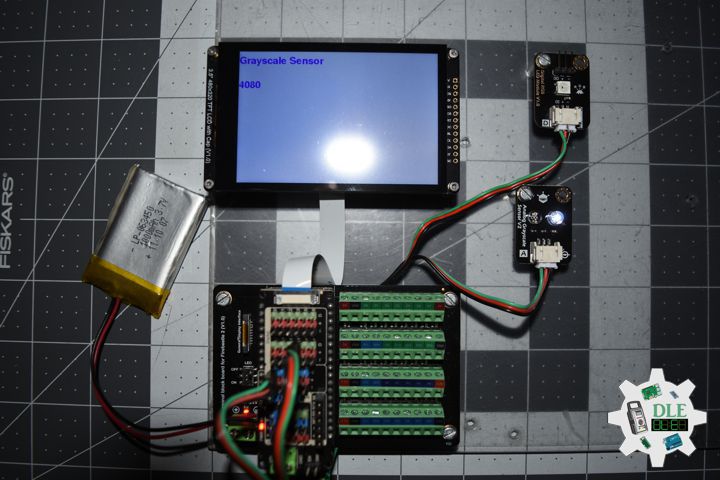
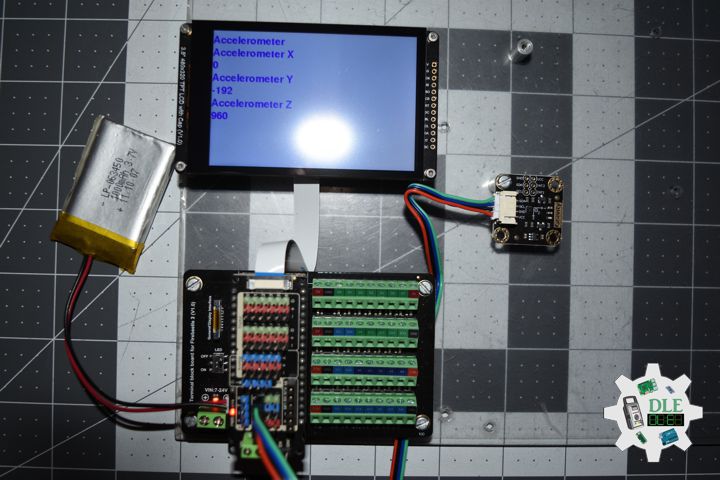
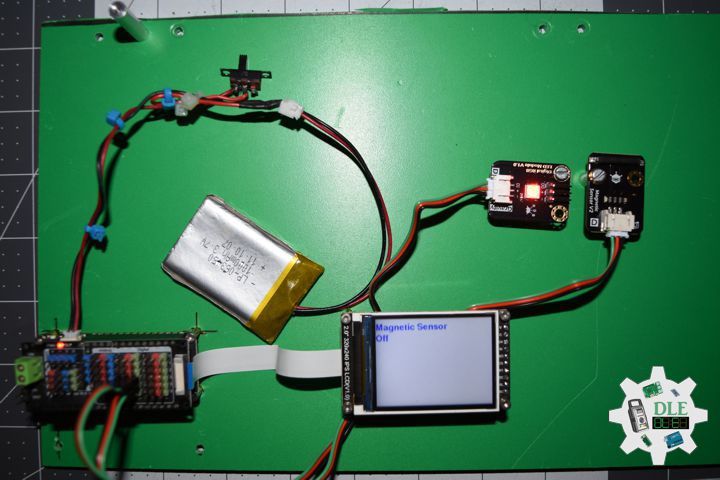
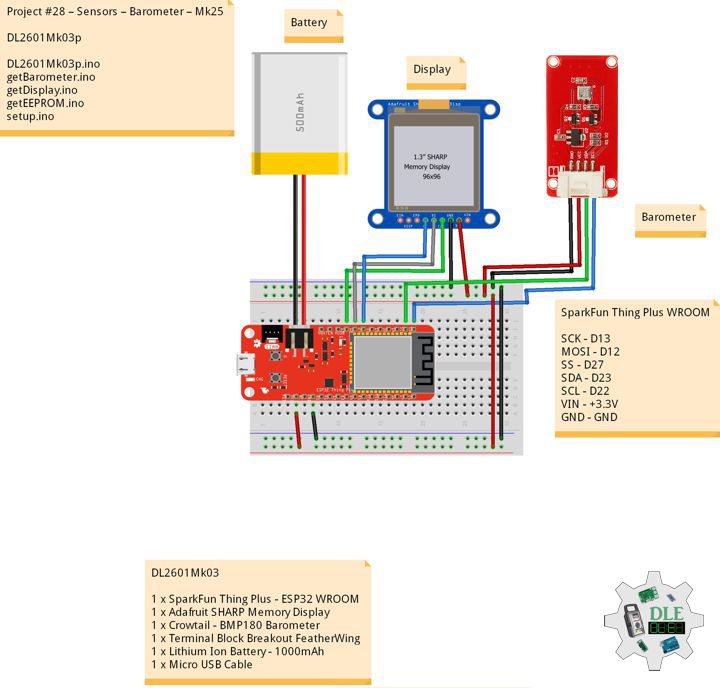
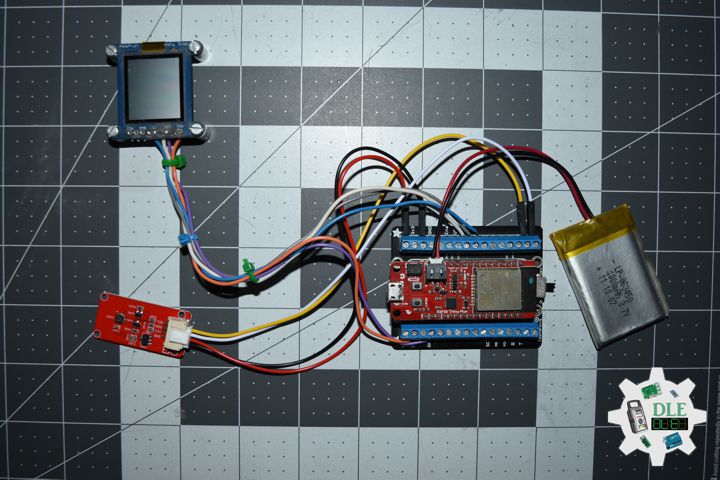
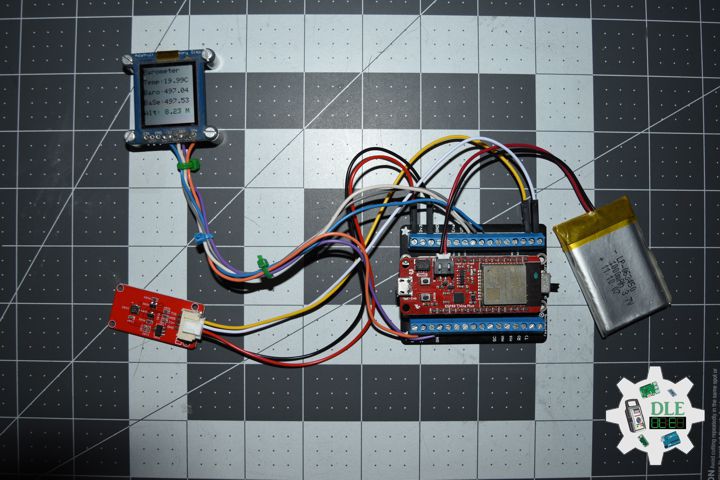
Crowtail – BMP180 Barometer
The BMP180 offers a pressure measuring range of 300 to 1100 hPa with an accuracy down to 0.02 hPa in advanced resolution mode. It’s based on piezo-resistive technology for high accuracy, ruggedness and long term stability. These come factory-calibrated, with the calibration coefficients already stored in ROM.
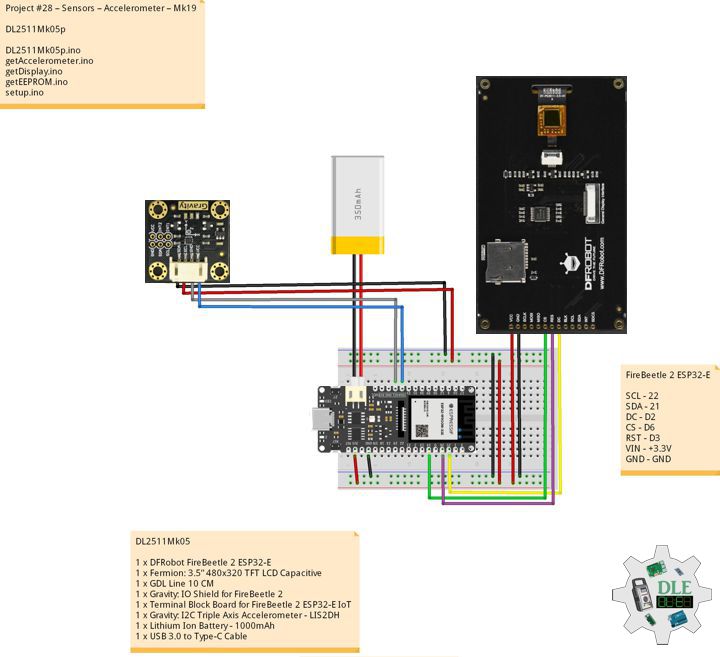
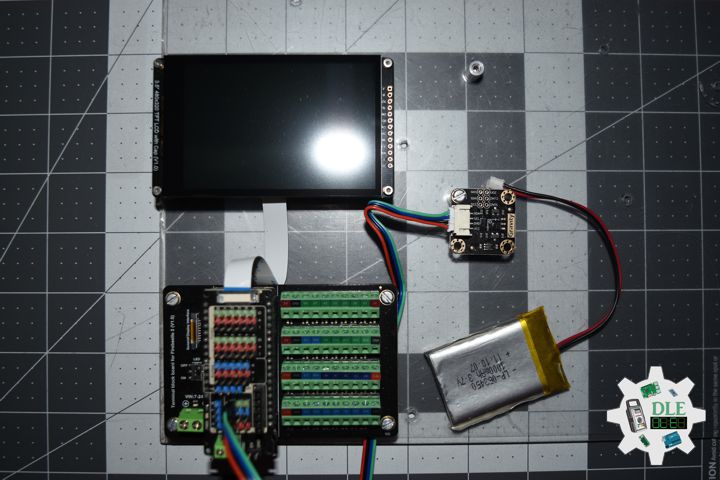
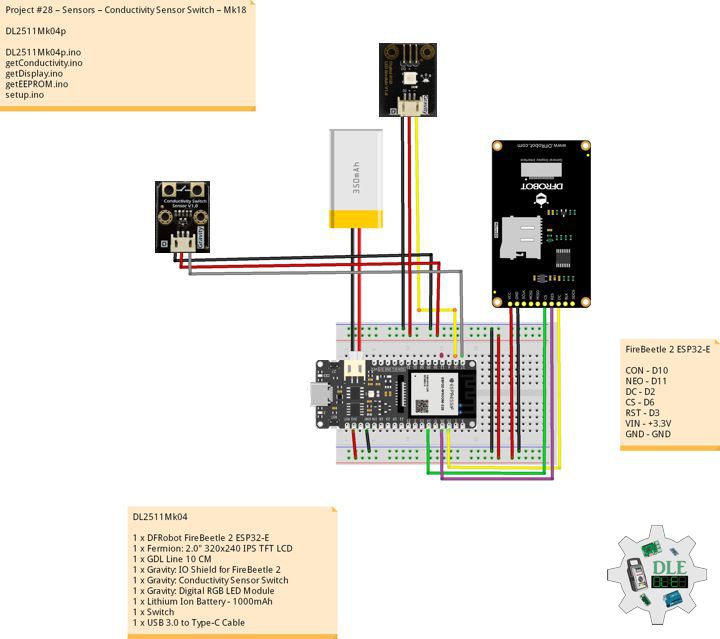
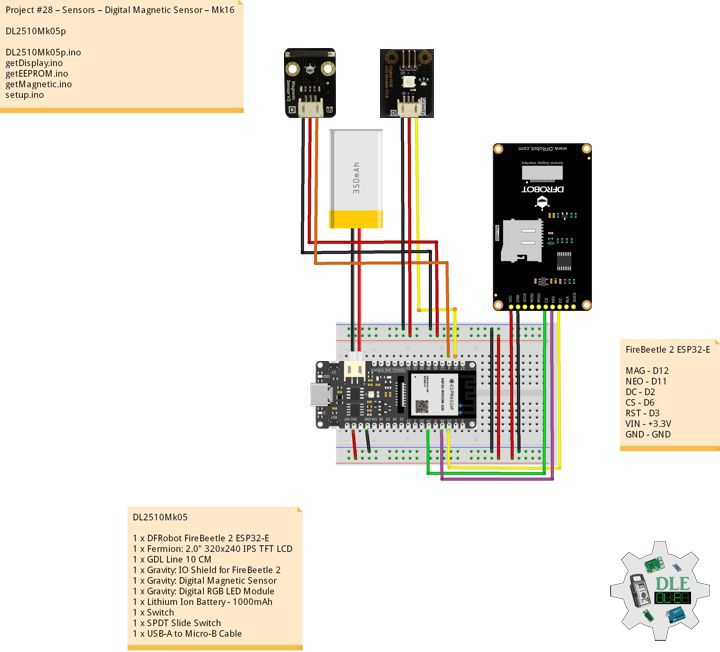
DL2601Mk03
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Crowtail – BMP180 Barometer
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 1000mAh
1 x Micro USB Cable
DL2601Mk03p
DL2601Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 – Sensors – Barometer – Mk25
28-25
DL2601Mk03p.ino
DL2601Mk03
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Crowtail - BMP180 Barometer
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 1000mAh
1 x Micro USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// BMP180 Barometer
#include <SFE_BMP180.h>
// BMP180 Barometer
SFE_BMP180 pressure;
// Altitude 8.23
#define ALTITUDE 8.23
// Status
char status;
// Temperature
double dTemp;
String sT;
// Pressure
double dPre;
String sP;
// Sea Level ALTITUDE
double dP0;
String sP0;
// ALTITUDE
double dAlt;
String sA;
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "28-25";
void loop() {
// Barometer Sensor
isBarometer();
// isDisplay Barometer
isDisplayBarometer();
// Delay 1 Second
delay( 1000 );
}
getBarometer.ino
// Barometer Sensor
// is Barometer
void isBarometer(){
// Temperature
status = pressure.getTemperature( dTemp );
if (status != 0) {
status = pressure.getPressure( dPre, dTemp );
if (status != 0) {
// Temperature
sT = dTemp;
// Pressure
sP = dPre;
// Sea Level ALTITUDE
sP0 = pressure.sealevel( dPre, ALTITUDE );
sA = ALTITUDE;
}
}
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Barometer
void isDisplayBarometer() {
// Text Display Barometer
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Barometer Sensor
display.setCursor(0,5);
display.println( "Barometer" );
display.setCursor(0,35);
// Temperature
display.print( "Temp: " );
display.setCursor(60,35);
display.print( sT );
display.setCursor(120,35);
display.println( "C" );
// Pressure
display.setCursor(0,65);
display.print( "Baro: " );
display.setCursor(60,65);
display.println( sP );
// Sea Level ALTITUDE
display.setCursor(0,95);
display.print( "BaSe: " );
display.setCursor(60,95);
display.println( sP0 );
// ALTITUDE
display.setCursor(0,125);
display.print( "Alt: " );
display.setCursor(60,125);
display.print( sA );
display.setCursor(120,125);
display.println( "M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// Initialize the sensor (it is important to get calibration values
// stored on the device).
pressure.begin();
// Delay
delay( 2000 );
// Temperature
pressure.startTemperature();
// Pressure
pressure.startPressure(3);
// Delay
delay( 100 );
// Display UID
// Don Luc
// Electronic
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank , Underwater and UAV Vehicle
- Unmanned Vehicles Terrestrial, Marine and UAV
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2026
https://www.donluc.com/luc/LucPaquinCVEng2026Mk01.pdf
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
DFRobot: https://learn.dfrobot.com/user-10186.html
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc