Electronics
Project #14: Components – Pololu Adjustable Boost Regulator 2.5-9.5V – Mk13
——
#DonLuc #Electronics #Components #BoostRegulator #Microcontrollers #Environment #Pololu #Consultant #Vlog #Aphasia
——
——
——
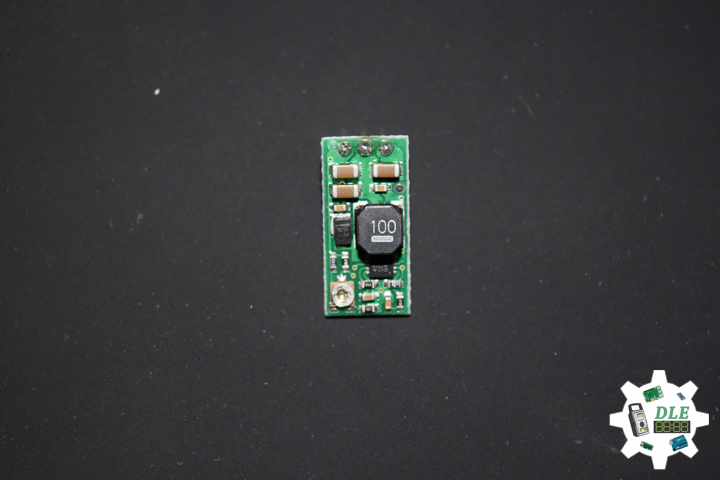
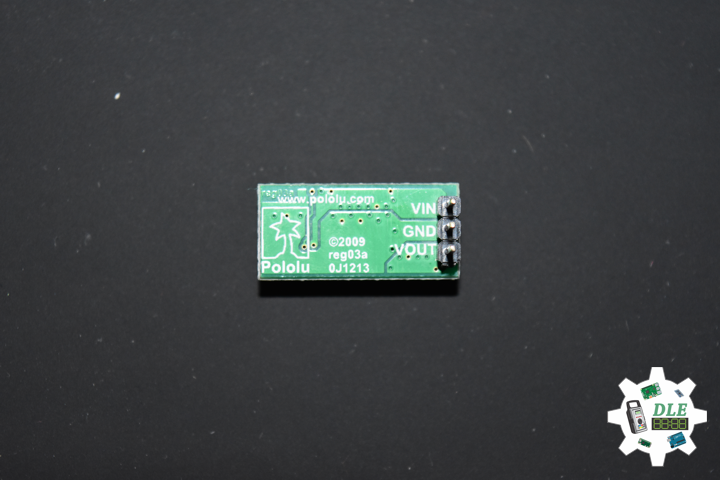
Pololu Adjustable Boost Regulator 2.5-9.5V
Pololu Item: 791
This powerful, adjustable boost regulator can generate an output voltage as high as 9.5 V from an input voltage as low as 1.5 V. A trimmer potentiometer lets you set the boost regulator’s output voltage to a value between 2.5 and 9.5 V. The Pololu adjustable boost regulator is a very flexible switching regulator that can generate voltages higher than its input voltage. We offer adjustable ranges approximately 2.5 V to 9.5 V. The output voltage can be set using the trimmer potentiometer in the upper-right corner of the board.
Some example applications include:
-Powering 5 V or 3.3 V systems from lower-voltage batteries
-Powering 5 V subsystems (e.g. sensors) in lower-voltage (e.g. 3.3 V) systems
-Achieving consistent actuator operation when powered by fluctuating batteries
-Powering high-brightness LEDs or a large number of LEDs in series
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #14: Components – SparkFun Rotary Switch – 10 Position – Mk12
——
#DonLuc #Electronics #Components #RotarySwitch #Microcontrollers #Environment #SparkFun #Consultant #Vlog #Aphasia
——
——
——
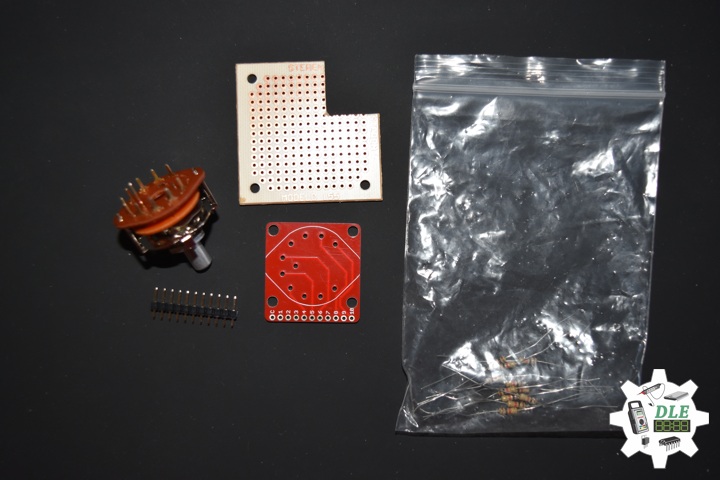
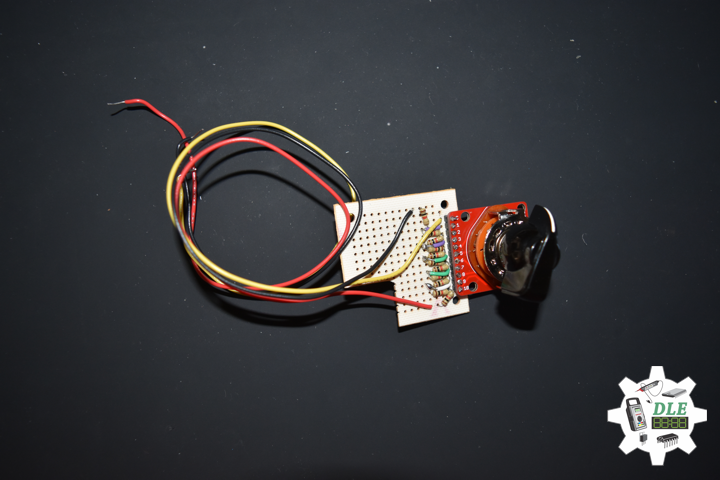
SparkFun Rotary Switch – 10 Position – SparkFun Rotary Switch Breakout
SparkFun Item: COM-13253 – BOB-13098
This is a single pole, 10 position rotary switch able to select up to 10 different states in a durable package. Unlike our other rotary switch, this model is much more robust and capable of handling larger currents and voltages. A very simple board designed to easily provide you access to each pin on our 10-position rotary switches. This breakout allows you to easily add a rotary switch to your next project without having to worry about attaching its unique footprint to a custom solderless breadboard. Each one of these boards breaks out the common ( C ), 1, 2, 3, 4, 5, 6, 7, 8, 9, and 10 positions on the board into 0.1″ spaced pins.
1 x SparkFun Rotary Switch – 10 Position
1 x SparkFun Rotary Switch Breakout
1 x Black Knob
11 x 1K Ohm
11 x Break Away Headers – Straight
1 x Breadboard Solderable
3 x Wire Solid Core – 22 AWG
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
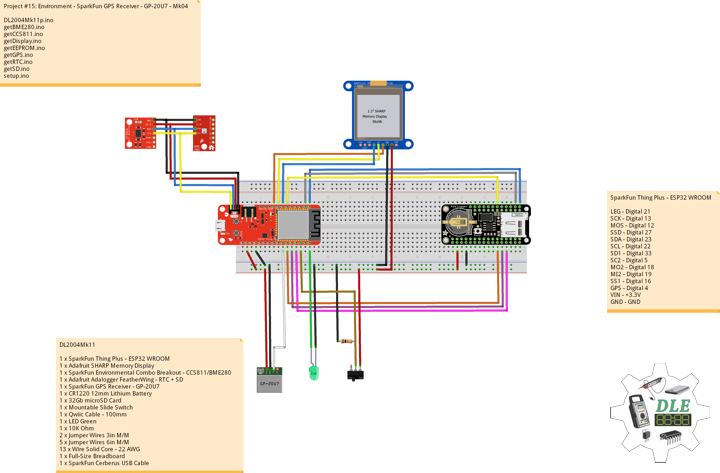
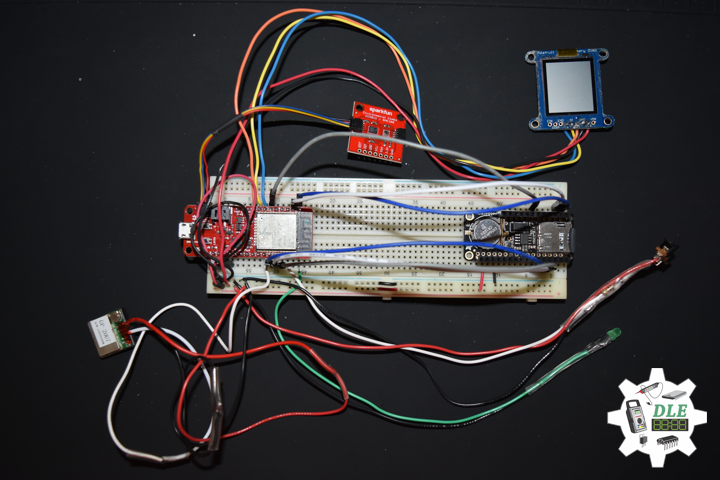
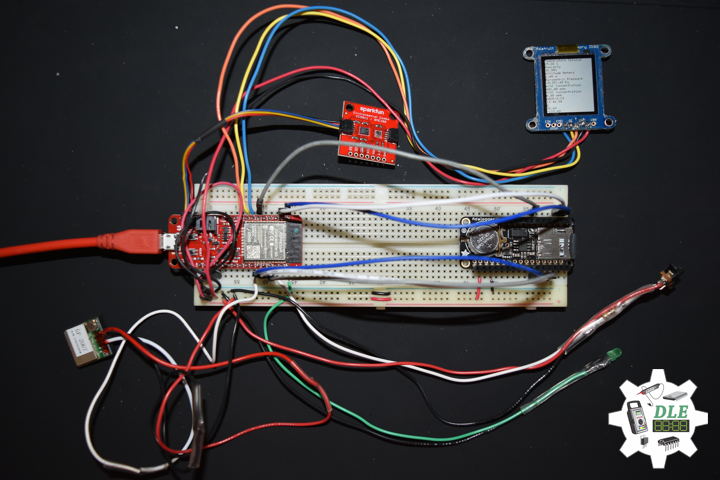
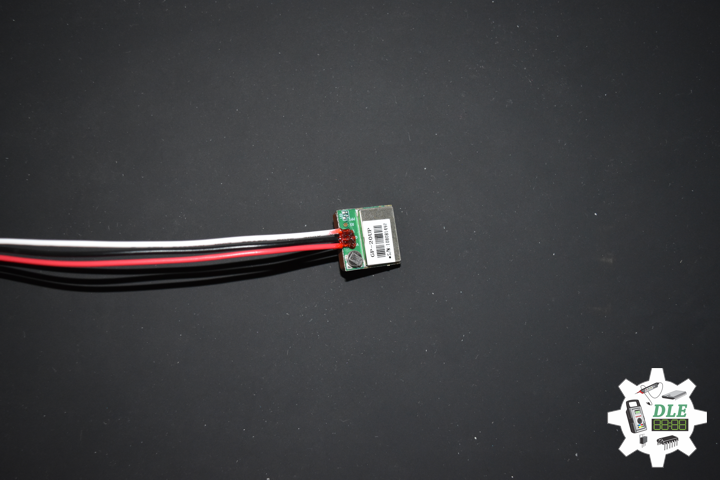
Project #15: Environment – SparkFun GPS Receiver – GP-20U7 – Mk04
——
#DonLuc #Environment #Microcontrollers #ESP32 #Adalogger #GPS #SparkFun #Fritzing #Programming #Adafruit #Arduino #Electronics #Consultant #Vlog #Aphasia
——
——
——
——
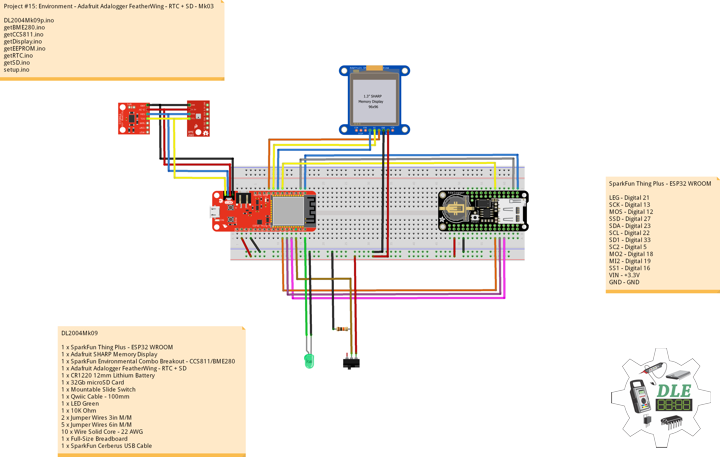
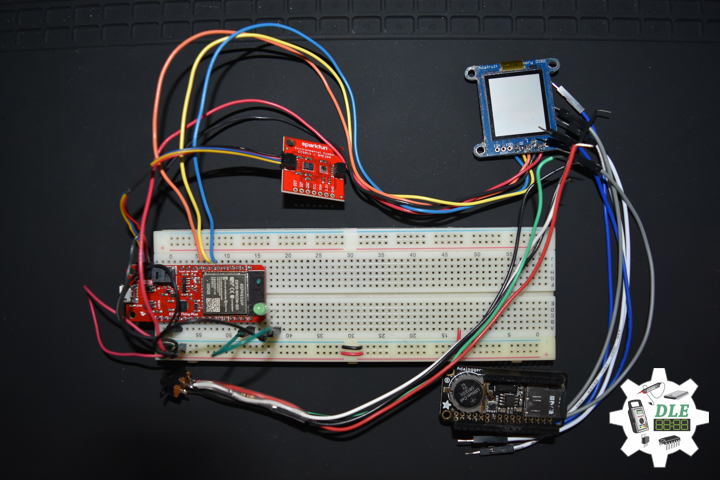
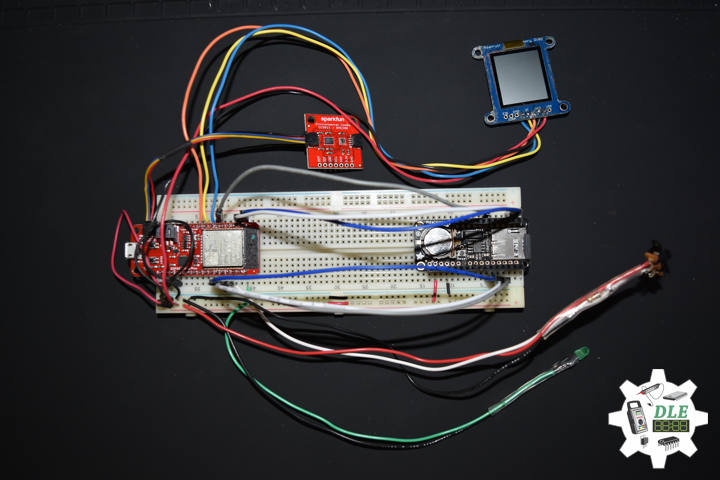
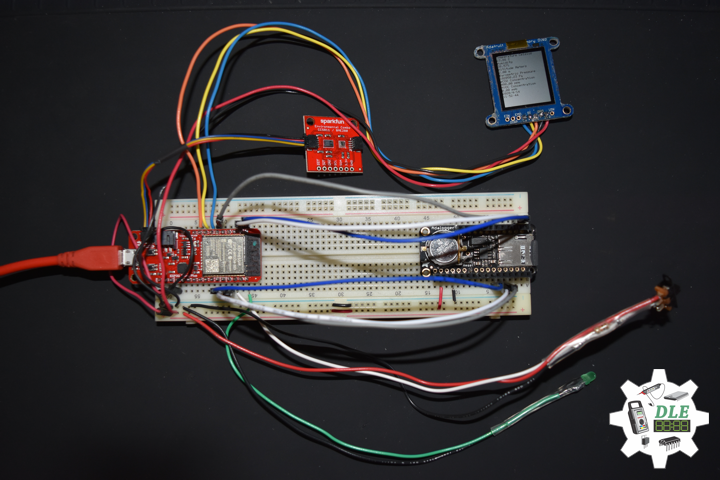
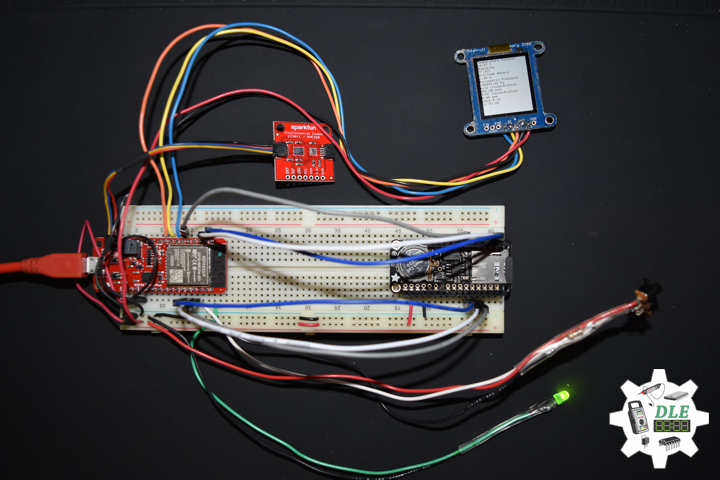
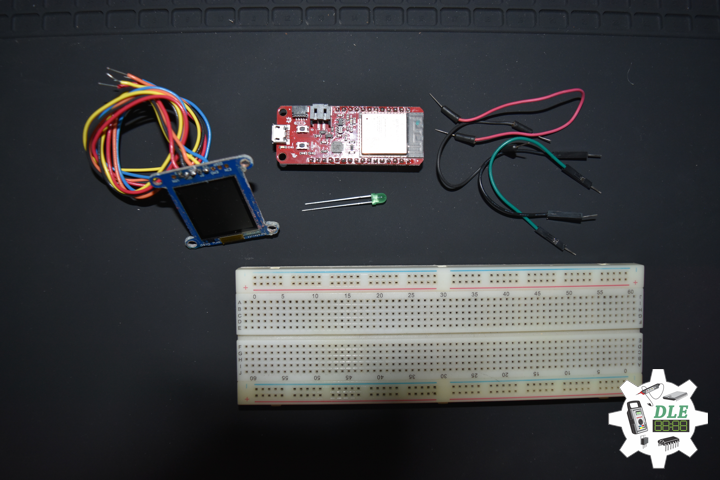
DL2004Mk11
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x Qwiic Cable – 100mm
1 x LED Green
1 x 10K Ohm
2 x Jumper Wires 3in M/M
5 x Jumper Wires 6in M/M
13 x Wire Solid Core – 22 AWG
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
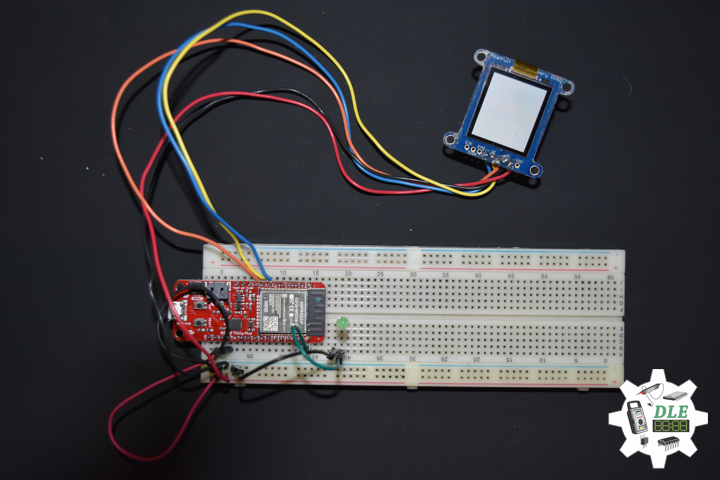
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
GPS – Digital 4
VIN – +3.3V
GND – GND
DL2004Mk11p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - Adafruit Adalogger FeatherWing - RTC + SD - Mk04
// 04-11
// DL2004Mk11p.ino 15-04
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 1 x 10K Ohm
// 2 x Jumper Wires 3in M/M
// 5 x Jumper Wires 6in M/M
// 13 x Wire Solid Core - 22 AWG
// 1 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 4
// This one is unused and doesnt have a conection
#define gpsTXPIN 36
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Software Version Information
String sver = "15-04";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Display Environmental
isDisplayEnvironmental();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
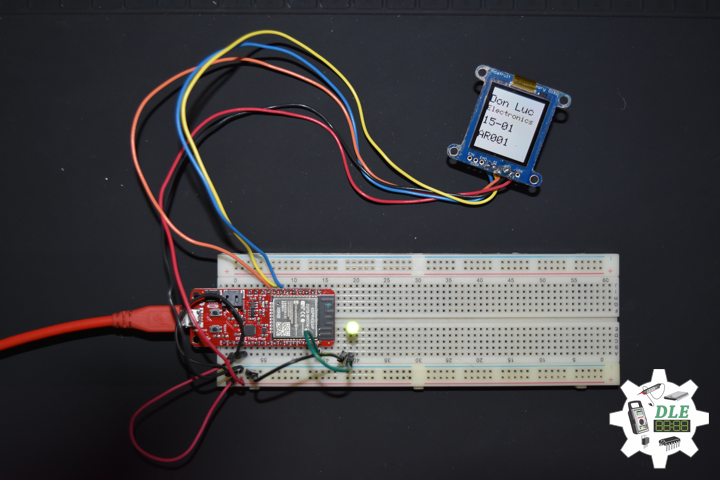
void isDisplayUID() {
// Text Display
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
delay( 10000 );
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #14: Components – SparkFun GPS Receiver – GP-20U7 – Mk11
——
#DonLuc #Electronics #Components #GPS #Microcontrollers #Environment #Adafruit #Consultant #Vlog #Aphasia
——
——
——
GPS Receiver – GP-20U7 (56 Channel)
SparkFun Item: GPS-13740
GPS (Global Positioning System) is a satellite-based radionavigation system. It is one of the global navigation satellite systems (GNSS) that provides geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites.
The GP-20U7 is a compact GPS receiver with a built-in high performances all-in-one GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #15: Environment – Adafruit Adalogger FeatherWing – RTC + SD – Mk03
——
#DonLuc #Environment #Microcontrollers #ESP32 #Adalogger #SparkFun #Fritzing #Programming #Adafruit #Arduino #Electronics #Consultant #Vlog #Aphasia
——
——
——
——
——
——
DL2004Mk09
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x Qwiic Cable – 100mm
1 x LED Green
1 x 10K Ohm
2 x Jumper Wires 3in M/M
5 x Jumper Wires 6in M/M
10 x Wire Solid Core – 22 AWG
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
VIN – +3.3V
GND – GND
DL2004Mk09p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - Adafruit Adalogger FeatherWing - RTC + SD - Mk03
// 04-09
// DL2004Mk09p.ino 15-03
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 1 x 10K Ohm
// 2 x Jumper Wires 3in M/M
// 5 x Jumper Wires 6in M/M
// 10 x Wire Solid Core - 22 AWG
// 1 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// Software Version Information
String sver = "15-03";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Display Environmental
isDisplayEnvironmental();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
delay( 10000 );
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #14: Components – Adafruit Adalogger FeatherWing – RTC + SD – Mk10
——
#DonLuc #Electronics #Components #Microcontrollers #Environment #Adafruit #Consultant #Vlog #Aphasia
——
——
——
——
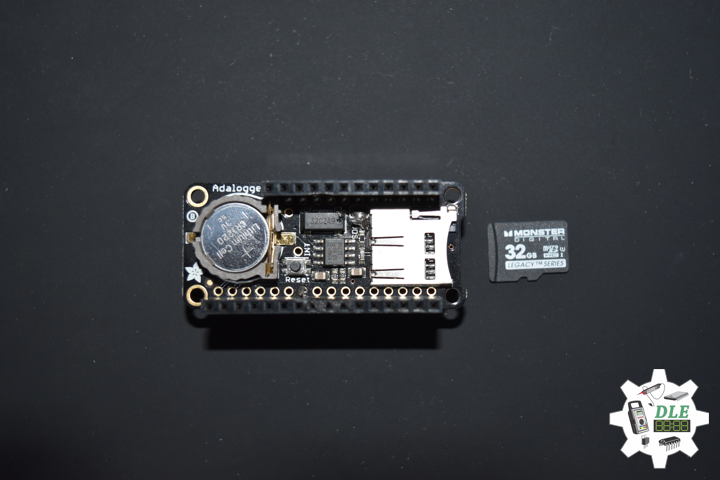
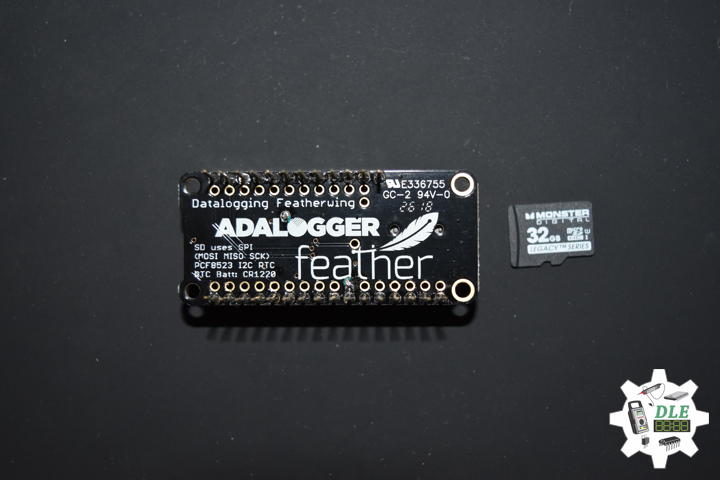
Adafruit Adalogger FeatherWing – RTC + SD
Adafruit Item: 2922
This is the Adafruit Adalogger FeatherWing it adds both a battery-backed Real Time Clock and microSD card storage to any Feather main board. This FeatherWing will make it real easy to add datalogging. You get both an I2C real time clock (PCF8523) with 32KHz crystal and battery backup, and a microSD socket that connects to the SPI port pins. Does not come with a microSD card. A CR1220 coin cell is required to use the RTC battery-backup capabilities.
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
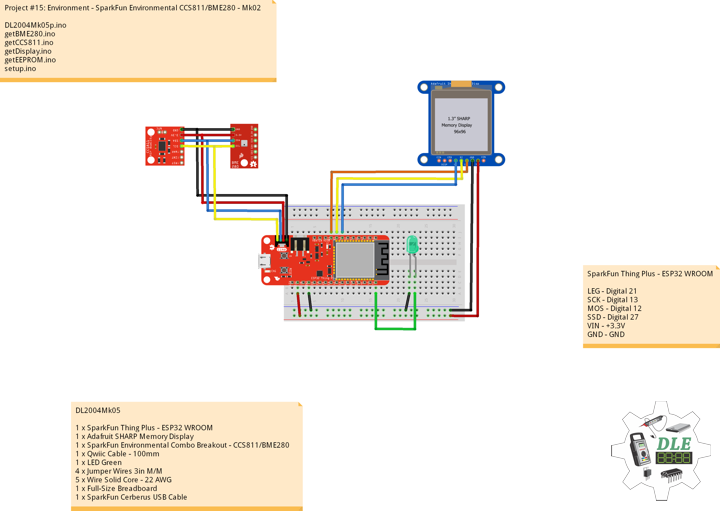
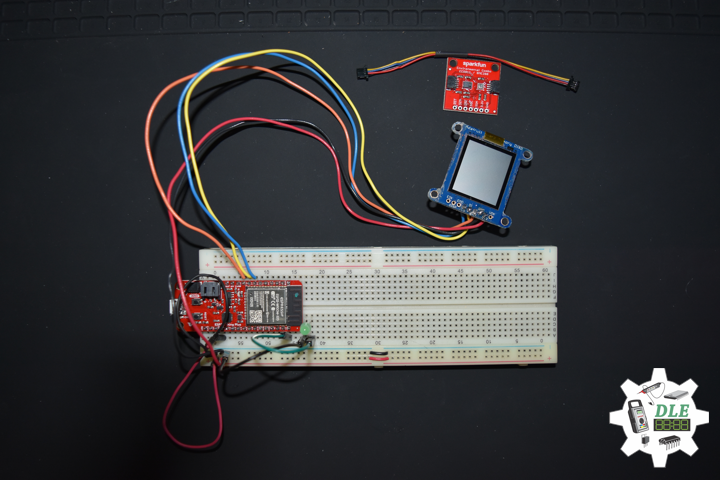
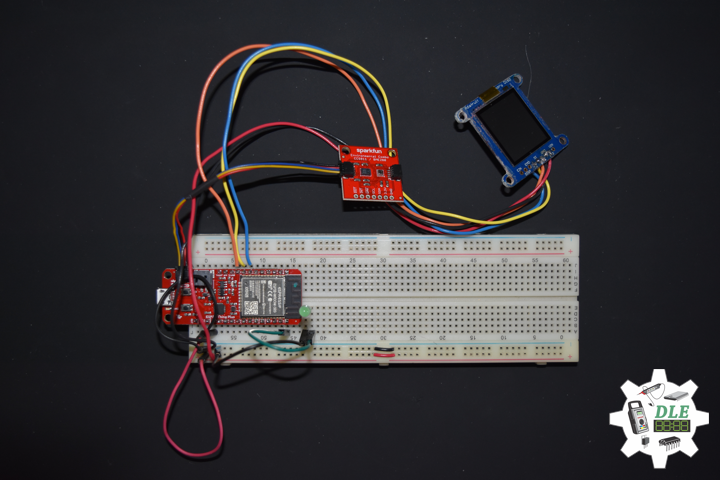
Project #15: Environment – SparkFun Environmental CCS811/BME280 – Mk02
——
#DonLuc #Environment #Microcontrollers #ESP32 #SparkFun #Fritzing #Programming #Adafruit #Arduino #Electronics #Consultant #Vlog #Aphasia
——
——
——
——
——
DL2004Mk05
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Qwiic Cable – 100mm
1 x LED Green
4 x Jumper Wires 3in M/M
5 x Wire Solid Core – 22 AWG
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
VIN – +3.3V
GND – GND
DL2004Mk05p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - SparkFun Environmental Combo Breakout - CCS811/BME280 - Mk02
// 04-05
// DL2004Mk05p.ino 15-02
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 4 x Jumper Wires 3in M/M
// 5 x Wire Solid Core - 22 AWG
// 1 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Software Version Information
String sver = "15-02";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Display Environmental
isDisplayEnvironmental();
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
delay( 10000 );
// LED Green
pinMode(iLEDGreen, OUTPUT);
digitalWrite(iLEDGreen, HIGH);
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #14: Components – SparkFun Environmental Combo Breakout – CCS811/BME280 – Mk09
——
#DonLuc #Electronics #Components #Microcontrollers #Environment #SparkFun #Consultant #Vlog #Aphasia
——
——
——
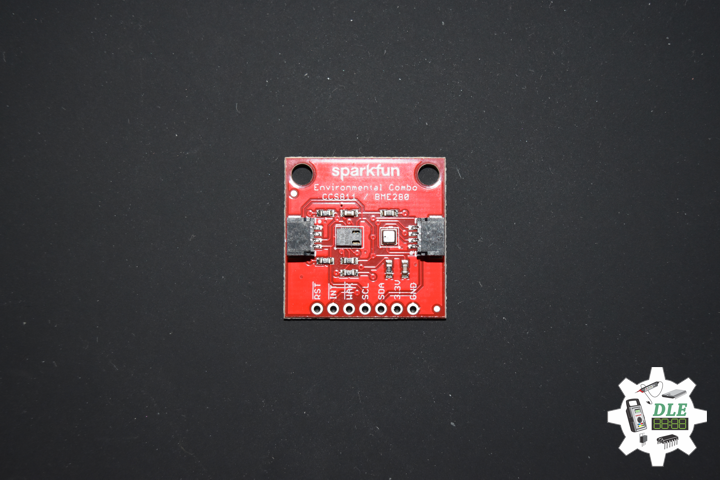
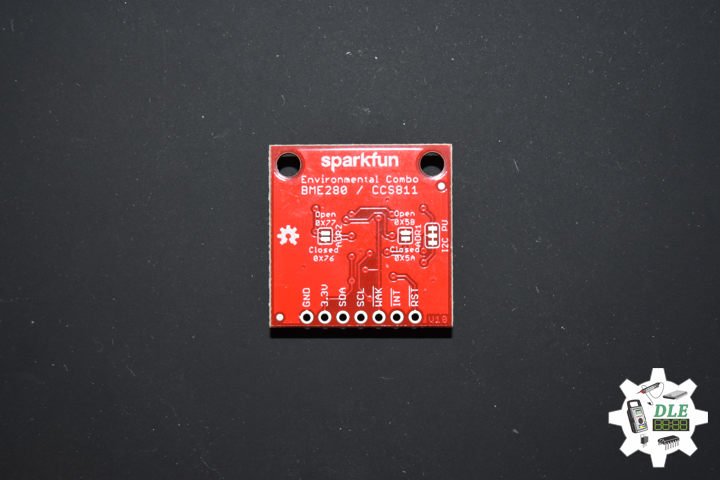
SparkFun Environmental Combo Breakout – CCS811/BME280 (Qwiic)
SparkFun Item: SEN-14348
The SparkFun CCS811/BME280 Environmental Combo Breakout takes care of all your atmospheric quality sensing needs with the popular CCS811 and BME280 ICs. This unique breakout provides a variety of environmental data, including barometric pressure, humidity, temperature, altitude, tVOCs and eCO2 levels. The CCS811 is an exceedingly popular sensor, providing readings for eCO2) in the parts per million (PPM) and total volatile organic compounds in the parts per billion (PPB). The CCS811 also has a feature that allows it to fine-tune its readings if it has access to the current humidity and temperature. Luckily for us, the BME280 provides humidity, temperature, altitude and barometric pressure. This allows the sensors to work together to give us more accurate readings than they’d be able to provide on their own. We also made it easy to interface with them via I2C.
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
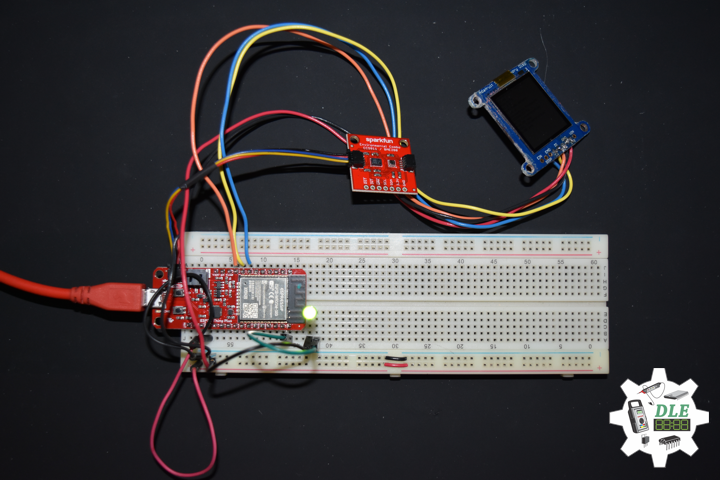
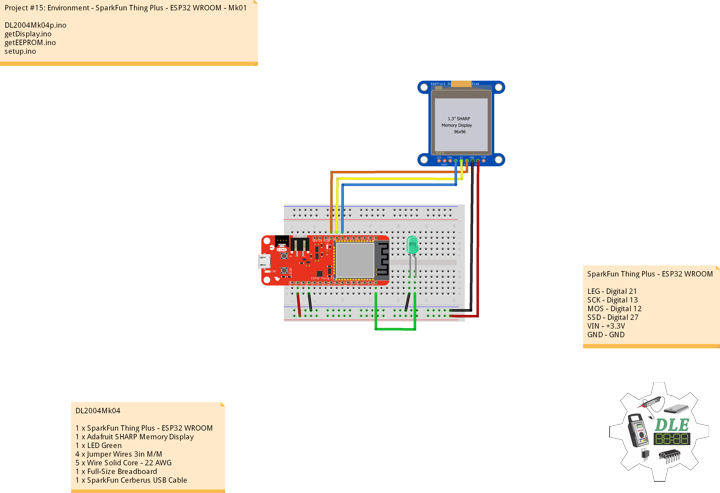
Project #15: Environment – SparkFun Thing Plus – ESP32 WROOM – Mk01
——
#DonLuc #Environment #Electronics #Microcontrollers #ESP32 #SparkFun #Fritzing #Programming #Adafruit #Arduino #Consultant #Vlog #Aphasia
——
——
——
——
——
DL2004Mk04
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x LED Green
4 x Jumper Wires 3in M/M
5 x Wire Solid Core – 22 AWG
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
VIN – +3.3V
GND – GND
DL2004Mk04p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - SparkFun Thing Plus - ESP32 WROOM - Mk01
// 04-04
// DL2004Mk04p.ino 15-01
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x LED Green
// 4 x Jumper Wires 3in M/M
// 5 x Wire Solid Core - 22 AWG
// 1 x Half-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include "EEPROM.h"
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
int minorHalfSize; // 1/2 of lesser of display width or height
// Software Version Information
#define EEPROM_SIZE 64
String sver = "15-01";
// Unit ID information
String uid = "";
void loop() {
// Return
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// text display EEPROM
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
display.setCursor(0,20);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,50);
display.println( "Electronics" );
display.setTextSize(3);
display.setCursor(0,80);
display.println( sver );
display.setCursor(0,120);
display.println( uid );
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
setup.ino
// Setup
void setup() {
// EEPROM with unique ID
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unit ID
isUID();
// SHARP Display start & clear the display
display.begin();
display.clearDisplay();
isDisplayUID();
delay( 5000 );
// LED Green
pinMode(iLEDGreen, OUTPUT);
digitalWrite(iLEDGreen, HIGH);
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #14: Components – SparkFun Thing Plus – ESP32 WROOM – Mk08
——
——
——
——
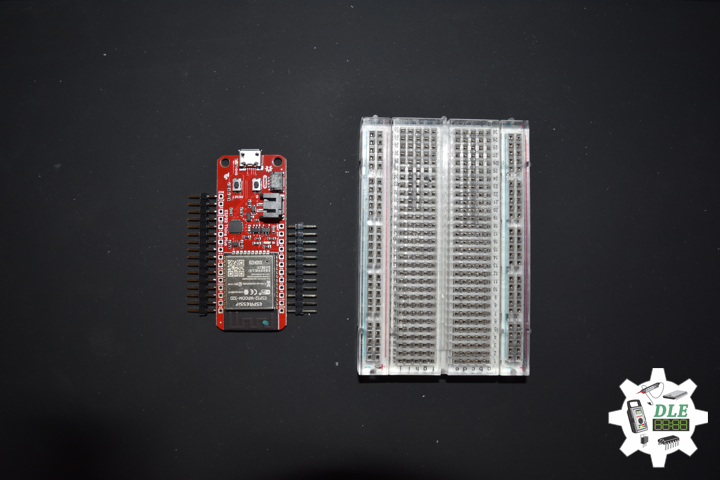
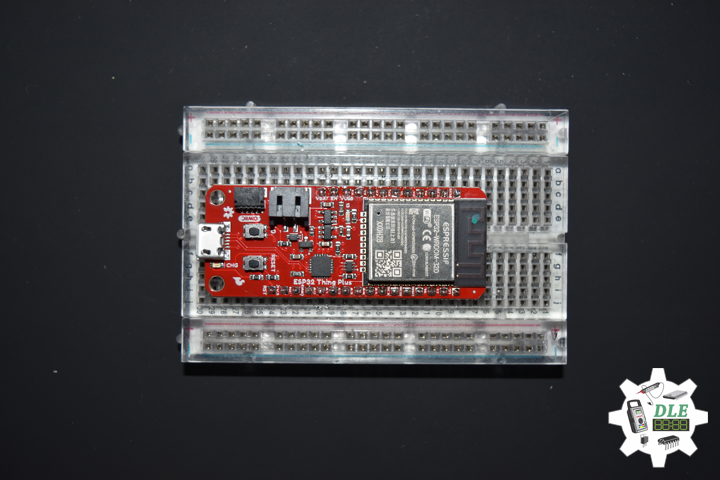
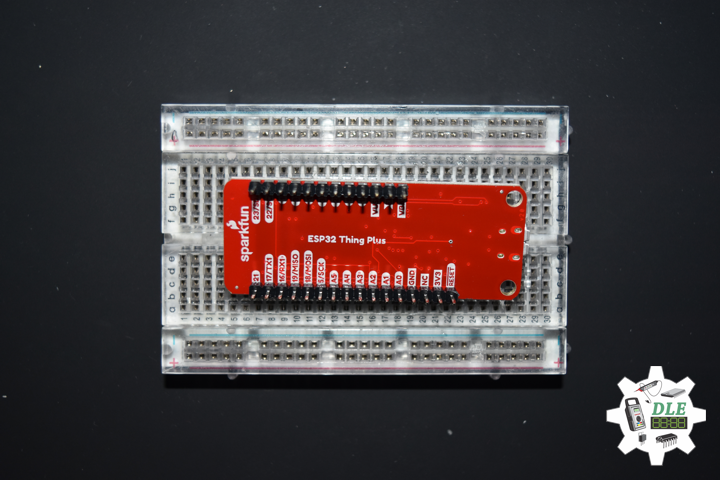
SparkFun Thing Plus – ESP32 WROOM
SparkFun Item: WRL-15663
The SparkFun ESP32 Thing Plus is the next step to get started with Espressif IoT ideations while still enjoying all the amenities of the original ESP32 Thing. Espressif’s ESP32 WROOM is a powerful WiFi and Bluetooth MCU module that targets a wide variety of applications. At the core of this module is the ESP32-D0WDQ6 chip which is designed to be both scalable and adaptive. To make the Thing Plus even easier to use, we’ve moved a few pins around to make the board Feather compatible and it utilizes our handy Qwiic Connect System which means no soldering or shields are required to connect it to the rest of your system.
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc