Technology
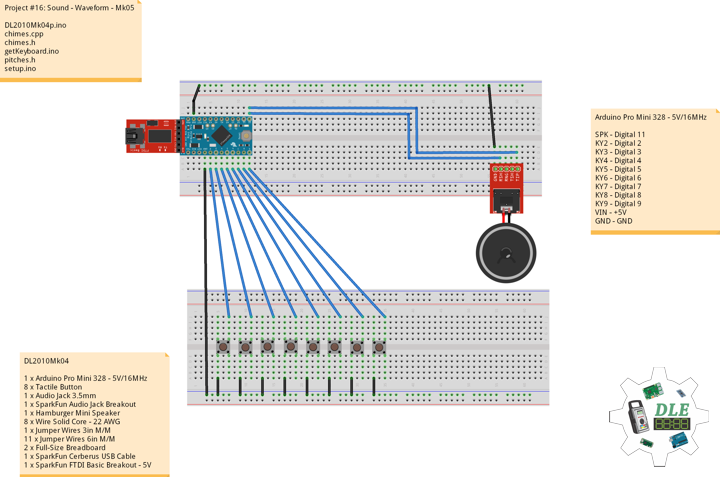
Project #16: Sound – Waveform – Mk05
——
#donluc #sound #simplekeyboard #synthesizer #programming #arduino #fritzing #electronics #microcontrollers #consultant #vlog
——
——
——
——
Waveform
In acoustics the waveform of a signal is the shape of its graph as a function of time, independent of its time and magnitude scales and of any displacement in time. In acoustics, it is usually applied to steady periodic sounds—variations of pressure in air or other media. In these cases, the waveform is an attribute that is independent of the frequency, amplitude, or phase shift of the signal. The term can also be used for non-periodic signals, like chirps and pulses. There are certain wave types that are historically used in electronic music, known as classic waveforms: sine, sawtooth, square, and triangle. These are the four waveforms generated by the classic Moog synthesizer oscillators, and are still quite useful in computer music.
Sine Wave
To the human ear, a sound that is made of more than one sine wave will have perceptible harmonics; addition of different sine waves results in a different waveform and thus changes the timbre of the sound. Presence of higher harmonics in addition to the fundamental causes variation in the timbre, which is the reason why the same musical note played on different instruments sounds different.
Synthesizer
A synthesizer is an electronic musical instrument that generates audio signals. Synthesizers generate audio through methods including subtractive synthesis, additive synthesis, and frequency modulation synthesis. These sounds may be shaped and modulated by components such as filters, envelopes, and low-frequency oscillators. Synthesizers are typically played with keyboards.
Simple keyboard in Arduino is a single-oscillator digital synthesizer generates a square wave tone(). But this simply a square wave and so it sounds rather boring. With a simple trick we can generate any waveform with an Arduino, and with this even imitate musical instruments. The adsr object provides a signal in the shape of an ADSR envelope (attack, decay, sustain, release) commonly used in synthesizer design. You specify an attack time in ms, a decay time in ms, a sustain level, and a release time in ms. Arduino waveform sine wave!
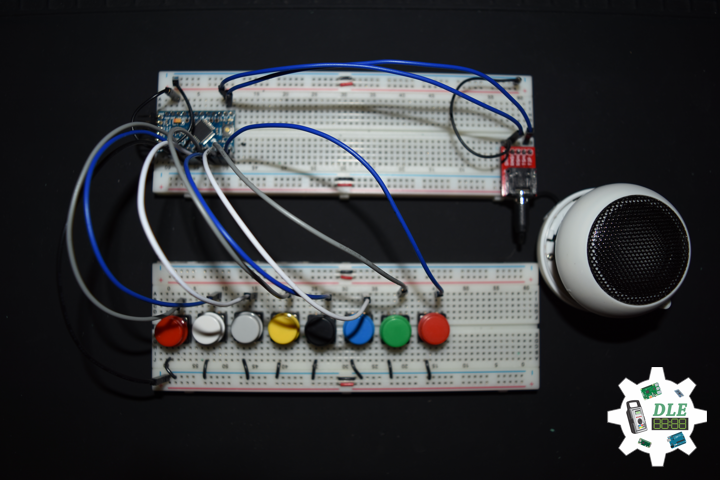
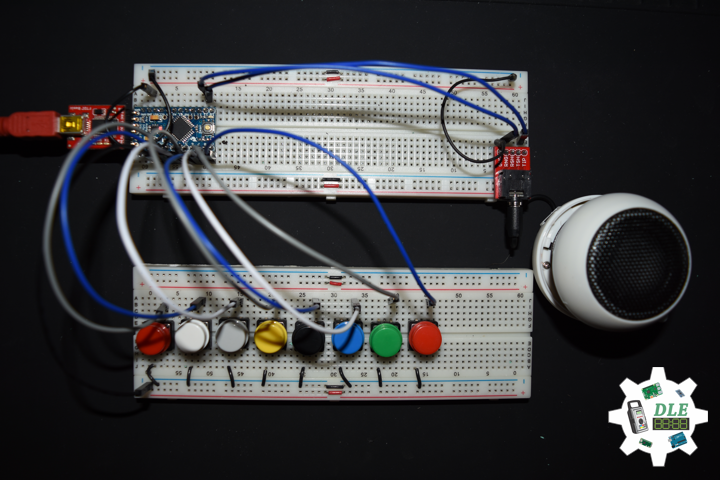
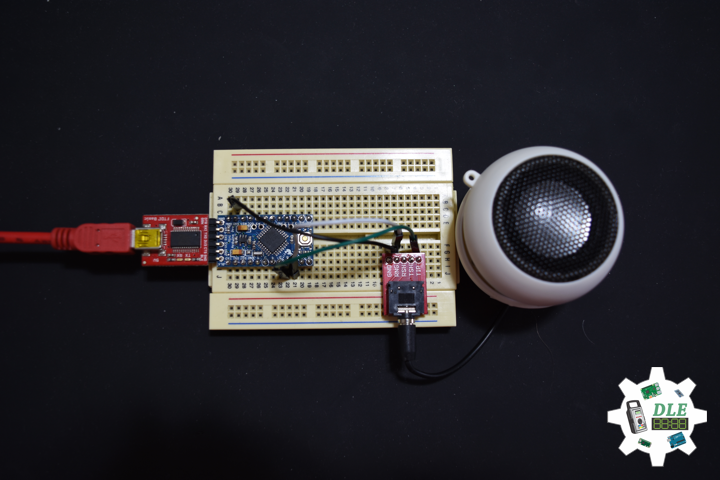
DL2010Mk04
1 x Arduino Pro Mini 328 – 5V/16MHz
8 x Tactile Button
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x Hamburger Mini Speaker
8 x Wire Solid Core – 22 AWG
1 x Jumper Wires 3in M/M
11 x Jumper Wires 6in M/M
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x SparkFun FTDI Basic Breakout – 5V
Arduino Pro Mini 328 – 5V/16MHz
SPK – Digital 11
KY2 – Digital 2
KY3 – Digital 3
KY4 – Digital 4
KY5 – Digital 5
KY6 – Digital 6
KY7 – Digital 7
KY8 – Digital 8
KY9 – Digital 9
VIN – +5V
GND – GND
DL2010Mk04p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #16: Sound - Waveform - Mk05
// 10-04
// DL2010Mk04p.ino 16-05
// 1 x Arduino Pro Mini 328 - 5V/16MHz
// 8 x Tactile Button
// 1 x Audio Jack 3.5mm
// 1 x SparkFun Audio Jack Breakout
// 1 x Hamburger Mini Speaker
// 8 x Wire Solid Core - 22 AWG
// 1 x Jumper Wires 3in M/M
// 11 x Jumper Wires 6in M/M
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x SparkFun FTDI Basic Breakout - 5V
// Include the Library Code
// Pitches
#include "pitches.h"
// Waveform - Chimes
#include "chimes.h"
using namespace Chimes;
// Sum of ADSR values must not exceed 100%
uint8_t envelope[] = {
0, // Attack[%]
20, // Decay[%]
0, // Sustain[%]
80, // Release[%]
16 // Sustain Level 1..32
};
// Simple Keyboard
// Minimum reading of the button that generates a note
const int iKeyboard2 = 2;
const int iKeyboard3 = 3;
const int iKeyboard4 = 4;
const int iKeyboard5 = 5;
const int iKeyboard6 = 6;
const int iKeyboard7 = 7;
const int iKeyboard8 = 8;
const int iKeyboard9 = 9;
// Button is pressed
int aa = 1;
int bb = 1;
int cc = 1;
int dd = 1;
int ee = 1;
int ff = 1;
int gg = 1;
int hh = 1;
// Software Version Information
String sver = "16-05";
void loop() {
// Keyboard
isKeyboard();
}
chimes.cpp
/*This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License. To view a copy of this license, visit https://creativecommons.org/licenses/by-sa/4.0/deed.en */ #include#include "chimes.h" #define ISR_CYCLE 16 //16s char strbuf[255]; uint16_t ADSR_default[] = {0, 0, 100, 0, MAX_VOLUME}; uint16_t ADSR_env[5]; uint16_t nSamples; //Number of samples in Array uint8_t adsrPhase; uint32_t tPeriod; uint8_t *samples; //Array with samples uint8_t *_envelope, _waveform, _duty_cycle; uint16_t &_sustain_lvl = ADSR_env[4]; enum ADSR_phase { ATTACK, DECAY, SUSTAIN, RELEASE }; namespace Chimes { void init(uint8_t waveform, uint8_t duty_cycle, uint8_t *envelope) { Serial.begin(115200); //PWM Signal generation DDRB |= (1 << PB3) + (1 << PB0); //OC2A, Pin 11 TCCR2A = (1 << WGM21) + (1 << WGM20); //Fast PWM TCCR2A |= (0 << COM2A0) + (1 << COM2A1); //Set OC2A on compare match, clear OC2A at BOTTOM,(inverting mode). TCCR2B = (0 << CS22) + (0 << CS21) + (1 << CS20); //No Prescaling samples = (uint8_t *)malloc(0); _waveform = waveform; _duty_cycle = duty_cycle; _envelope = envelope; } void play(uint16_t freq, uint16_t duration) { uint8_t waveform = _waveform; //Init adsr according to the length of the note for (int i = 0; i < 4; i++) { if (_envelope) { ADSR_env[i] = (uint32_t)_envelope[i] * duration / 100; } else { ADSR_env[i] = (uint32_t)ADSR_default[i] * duration / 100; } //Serial.println(ADSR_env[i]); } ADSR_env[4] = _envelope ? _envelope[4] : MAX_VOLUME; //Serial.println(ADSR_env[4]); if (freq == 0) { //Pause tPeriod = ISR_CYCLE * 100; waveform = PAUSE; } else tPeriod = 1E6 / freq; nSamples = tPeriod / ISR_CYCLE; realloc(samples, nSamples); uint16_t nDuty = (_duty_cycle * nSamples) / 100; switch (waveform) { case SINE: //Sinewave for (int i = 0; i < nSamples; i++) { samples[i] = 128 + 127 * sin(2 * PI * i / nSamples); } break; case TRI: //Triangle for (int16_t i = 0; i < nSamples; i++) { if (i < nDuty) { samples[i] = 255 * (double)i / nDuty; //Rise } else { samples[i] = 255 * (1 - (double)(i - nDuty) / (nSamples - nDuty)); //Fall } } break; case RECT: //Rectangle for (int16_t i = 0; i < nSamples; i++) { i < nDuty ? samples[i] = 255 : samples[i] = 0; } break; case PAUSE: //Rectangle memset(samples, 0, nSamples); } TIMSK2 = (1 << TOIE2); /*for(uint16_t i = 0; i < nSamples; i++) { sprintf(strbuf, "%d: %d", i, samples[i]); Serial.println(strbuf); }*/ } //Returns true, while note is playing boolean isPlaying() { return (1 << TOIE2) & TIMSK2; } } // namespace Chimes //Called every 16s, when TIMER1 overflows ISR(TIMER2_OVF_vect) { static uint32_t adsr_timer, adsr_time; static uint16_t cnt; //Index counter static uint8_t sustain_lvl, vol; //Set OCR2A to the next value in sample array, this will change the duty cycle accordingly OCR2A = vol * samples[cnt] / MAX_VOLUME; if (cnt < nSamples - 1) { cnt++; } else { cnt = 0; adsr_timer += tPeriod; if (adsr_timer >= 10000) { //every 10 millisecond adsr_timer = 0; switch (adsrPhase) { case ATTACK: if (ADSR_env[ATTACK]) { vol = MAX_VOLUME * (float)adsr_time / ADSR_env[ATTACK]; if (vol == MAX_VOLUME) { //Attack phase over adsrPhase = DECAY; adsr_time = 0; } } else { adsrPhase = DECAY; vol = MAX_VOLUME; adsr_time = 0; } break; case DECAY: if (ADSR_env[DECAY]) { sustain_lvl = _sustain_lvl; vol = MAX_VOLUME - (MAX_VOLUME - _sustain_lvl) * (float)adsr_time / ADSR_env[DECAY]; if (vol <= sustain_lvl) { adsr_time = 0; adsrPhase = SUSTAIN; } } else { adsrPhase = SUSTAIN; sustain_lvl = MAX_VOLUME; adsr_time = 0; } break; case SUSTAIN: if (adsr_time > ADSR_env[SUSTAIN]) { adsrPhase = RELEASE; adsr_time = 0; } break; case RELEASE: if (ADSR_env[RELEASE]) { vol = sustain_lvl * (1 - (float)adsr_time / ADSR_env[RELEASE]); if (vol == 0) { //Attack phase over adsr_time = 0; TIMSK2 = (0 << TOIE2); adsrPhase = ATTACK; } } else { adsrPhase = ATTACK; vol = 0; adsr_time = 0; TIMSK2 = (0 << TOIE2); } break; } adsr_time += 10; } } }
chimes.h
/*This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License.
To view a copy of this license, visit https://creativecommons.org/licenses/by-sa/4.0/deed.en */
#ifndef CHIMES_H
#define CHIMES_H
#include "Arduino.h"
enum waveform
{
SINE, //Sinus
RECT, //Triangle
TRI, //Rectangle
PAUSE //Internal, do not use
};
#define MAX_VOLUME 32
namespace Chimes
{
void init(uint8_t waveform = SINE, uint8_t duty_cycle = 50, uint8_t *envelope = NULL);
void play(uint16_t freq, uint16_t duration);
//Returns true while note is playing
boolean isPlaying();
} // namespace Chimes
#endif
getKeyboard.ino
// getKeyboard
// setupKeyboard
void setupKeyboard() {
// Initialize the pushbutton pin as an input
pinMode(iKeyboard2, INPUT_PULLUP);
pinMode(iKeyboard3, INPUT_PULLUP);
pinMode(iKeyboard4, INPUT_PULLUP);
pinMode(iKeyboard5, INPUT_PULLUP);
pinMode(iKeyboard6, INPUT_PULLUP);
pinMode(iKeyboard7, INPUT_PULLUP);
pinMode(iKeyboard8, INPUT_PULLUP);
pinMode(iKeyboard9, INPUT_PULLUP);
}
// isKeyboard
void isKeyboard() {
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard2) == LOW ) {
// Button is pressed - pullup keeps pin high normally
aa = aa + 1;
// Waveform
isPlaying();
play(NOTE_A4, 1000);
}
else
{
aa = aa - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard3) == LOW ) {
// Button is pressed - pullup keeps pin high normally
bb = bb + 1;
// Waveform
isPlaying();
play(NOTE_B4, 1000);
}
else
{
bb = bb - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard4) == LOW ) {
// Button is pressed - pullup keeps pin high normally
cc = cc + 1;
// Waveform
isPlaying();
play(NOTE_C5, 1000);
}
else
{
cc = cc - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard5) == LOW ) {
// Button is pressed - pullup keeps pin high normally
dd = dd + 1;
// Waveform
isPlaying();
play(NOTE_D5, 1000);
}
else
{
dd = dd - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard6) == LOW ) {
// Button is pressed - pullup keeps pin high normally
ee = ee + 1;
// Waveform
isPlaying();
play(NOTE_E5, 1000);
}
else
{
ee = ee - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard7) == LOW ) {
// Button is pressed - pullup keeps pin high normally
ff = ff + 1;
// Waveform
isPlaying();
play(NOTE_F5, 1000);
}
else
{
ff = ff - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard8) == LOW ) {
// Button is pressed - pullup keeps pin high normally
gg = gg + 1;
// Waveform
isPlaying();
play(NOTE_G5, 1000);
}
else
{
gg = gg - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard9) == LOW ) {
// Button is pressed - pullup keeps pin high normally
hh = hh + 1;
// Waveform
isPlaying();
play(NOTE_A5, 1000);
}
else
{
hh = hh - 1;
}
// Waveform
isPlaying();
play(0, 50);
}
pitches.h
/***************************************************************** * Pitches NOTE_B0 <=> NOTE_DS8 - NOTE_A4 is "A" measured at 440Hz *****************************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
setup.ino
// Setup
void setup() {
// Setup Keyboard
setupKeyboard();
// Waveform
init(
// SINE, TRI and RECT
SINE,
// Duty cycle 0..100%, only matters for Triangle and Rectangle
50,
// Envelope
envelope);
}
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc...)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc...)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc...)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc...)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc...)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc...)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc...)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc...)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
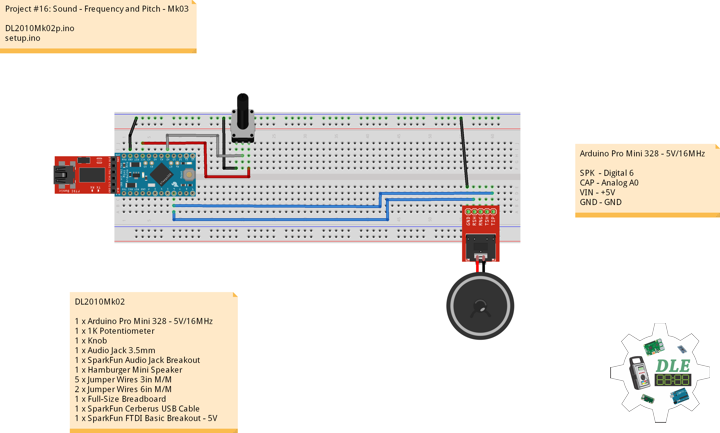
Project #16: Sound – Frequency and Pitch – Mk03
——
#donluc #sound #synthesizer #programming #arduino #fritzing #electronics #microcontrollers #consultant #vlog
——
——
——
——
Frequency and Pitch
Frequency is how often something happens. Since sound is vibrations, we use frequency to describe how often something is vibrating. Frequency is measured in Hertz (Hz), which is simply how often per second. So, something oscillating at 1 Hz is vibrating once every second. A complete vibration is called a cycle, measured at one full peak and trough of a wave. In the early days of electronic music, the terms cycles per second (cps) was used instead of Hz.
The above picture is a sine wave, the purest representation of a single frequency or vibration. The time it takes for the wave to complete one cycle is the wave’s frequency. More vibrations per second produce higher sounding frequencies and fewer vibrations per second produce lower sounding frequencies. Tuning instruments, science experiments, testing audio equipment, testing your hearing what’s the highest frequency you can hear? Humans perceive frequency of sound waves as pitch. Each musical note corresponds to a particular frequency which can be measured in hertz. An infant’s ear is able to perceive frequencies ranging from 20 Hz to 20,000 Hz. The average adult human can hear sounds between 20 Hz and 16,000 Hz.
Tone
The Arduino is a single-oscillator digital synthesizer. Generates a square wave tone() of the specified frequency on a pin. The pin can be connected to a other speaker. Only one tone can be generated at a time. If the tone is playing on the same pin, the call will set its frequency. the Arduino pin on which to generate the tone. The frequency of the tone in hertz. The duration of the tone in milliseconds. By passing voltage through a potentiometer and into an analog input on your board, it is possible to measure the amount of resistance produced by a potentiometer as an frequency.
DL2010Mk02
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x 1K Potentiometer
1 x Knob
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x Hamburger Mini Speaker
5 x Jumper Wires 3in M/M
2 x Jumper Wires 6in M/M
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x SparkFun FTDI Basic Breakout – 5V
Arduino Pro Mini 328 – 5V/16MHz
SPK – Digital 6
CAP – Analog A0
VIN – +5V
GND – GND
DL2010Mk02p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #16: Sound - Frequency and Pitch - Mk03
// 10-02
// DL2010Mk02p.ino 16-03
// 1 x Arduino Pro Mini 328 - 5V/16MHz
// 1 x 1K Potentiometer
// 1 x Knob
// 1 x Audio Jack 3.5mm
// 1 x SparkFun Audio Jack Breakout
// 1 x Hamburger Mini Speaker
// 5 x Jumper Wires 3in M/M
// 2 x Jumper Wires 6in M/M
// 1 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x SparkFun FTDI Basic Breakout - 5V
// Include the Library Code
// Mini Speaker
int SPK = 6;
// Frequency
int iCap = A0;
int iFreg = 0;
// Software Version Information
String sver = "16-03";
void loop() {
// Frequency
iFreg = analogRead(iCap);
iFreg = map(iFreg, 0, 1023, 31, 4978);
// Mini Speaker
tone(SPK, iFreg, 20);
// Delay the actual frequency of updates reads for stability
delay(1);
}
setup.ino
// Setup
void setup() {
// Setup
}
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
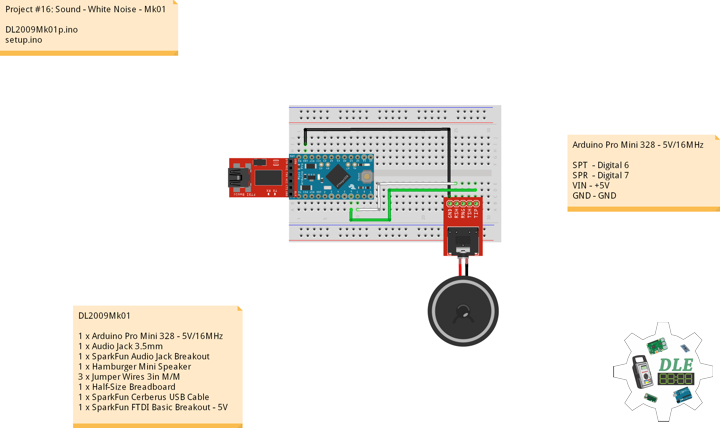
Project #16: Sound – White Noise – Mk01
——
#donluc #sound #programming #arduino #fritzing #electronics #microcontrollers #consultant #vlog
——
——
——
——
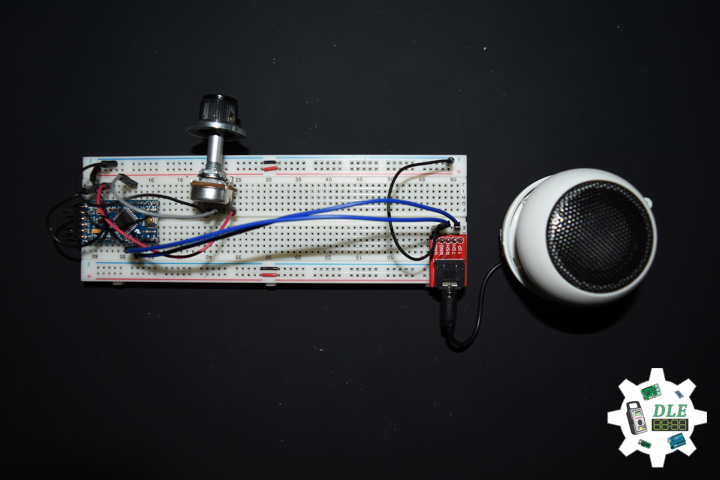
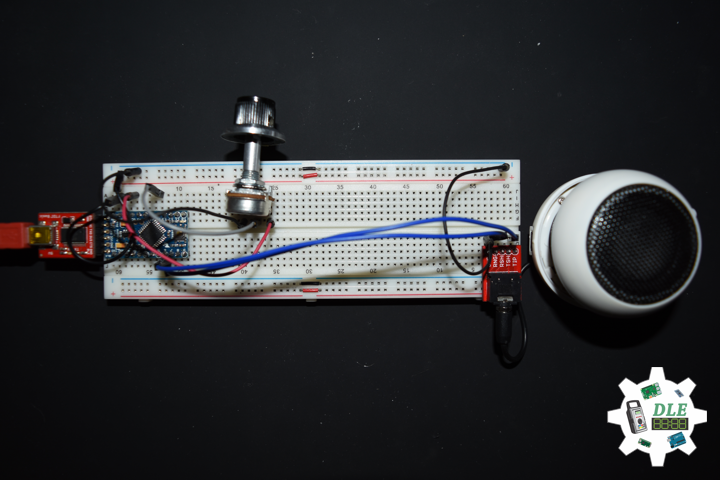
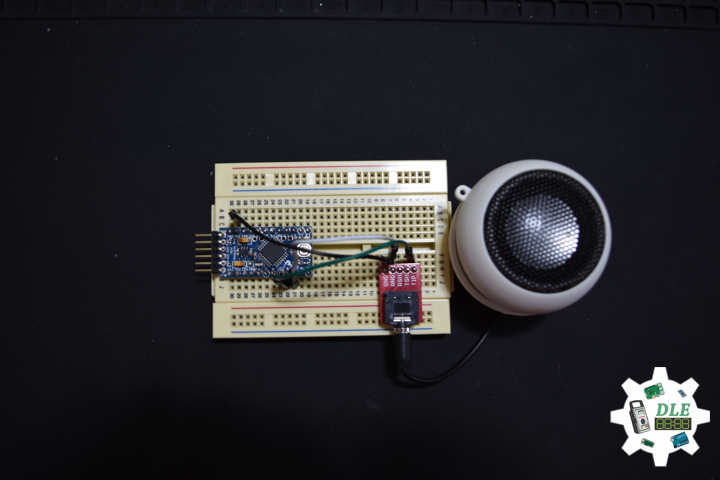
White Noise
In signal processing, white noise is a random signal having equal intensity at different frequencies, giving it a constant power spectral density. In other words, the signal has equal power in any band of a given bandwidth when the bandwidth is measured in Hz. The term is used, with this or similar meanings, in many scientific and technical disciplines, including physics, acoustical engineering, telecommunications, and statistical forecasting. White noise refers to a statistical model for signals and signal sources, rather than to any specific signal.
White noise is commonly used in the production of electronic music, usually either directly or as an input for a filter to create other types of noise signal. A simple example of white noise is a nonexistent radio station (static). White noise is also used to obtain the impulse response of an electrical circuit, in particular of amplifiers and other audio equipment. Computing, white noise is used as the basis of some random number generators.
Sounds from all frequencies we can hear. Tends to sound high pitch and tinny. This tends to be the least pleasant noise.
Simple breakout board for the 3.5mm audio jack, TRS are abbreviations for Tip / Ring / Sleeve. A TRS is often though of as stereo, as the addition of the ring gives us two contacts allowing us a left and right audio channel.
DL2009Mk01
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x Hamburger Mini Speaker
3 x Jumper Wires 3in M/M
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x SparkFun FTDI Basic Breakout – 5V
Arduino Pro Mini 328 – 5V/16MHz
SPT – Digital 6
SPR – Digital 7
VIN – +5V
GND – GND
DL2009Mk01p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #16: Sound - White Noise - Mk01
// 09-01
// DL2009Mk01p.ino 16-01
// 1 x Arduino Pro Mini 328 - 5V/16MHz
// 1 x Audio Jack 3.5mm
// 1 x SparkFun Audio Jack Breakout
// 1 x Hamburger Mini Speaker
// 3 x Jumper Wires 3in M/M
// 1 x Half-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x SparkFun FTDI Basic Breakout - 5V
// Include the Library Code
// Mini Speaker
int Tip = 6;
int Ring = 7;
long randNumber;
// Software Version Information
String sver = "16-01";
void loop() {
// Mini Speaker
randNumber = random();
digitalWrite( Tip , randNumber );
randNumber = random();
digitalWrite( Ring , randNumber );
// Delay the actual frequency of updates
delayMicroseconds (50);
}
setup.ino
// Setup
void setup() {
// Connect a speaker between ground
pinMode(Tip, OUTPUT);
pinMode(Ring, OUTPUT);
// Random Seed
randomSeed(analogRead( Tip ));
randomSeed(analogRead( Ring ));
}
Technology Experience
- Single-Board Microcontrollers (Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
Project #15: Environment – PIR Motion Sensor – Mk12
——
#DonLuc #Environment #ESP32 #MQ #GPS #EMF #PIR #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Consultant #Electronics #Microcontrollers #Vlog #Aphasia
——
——
——
——
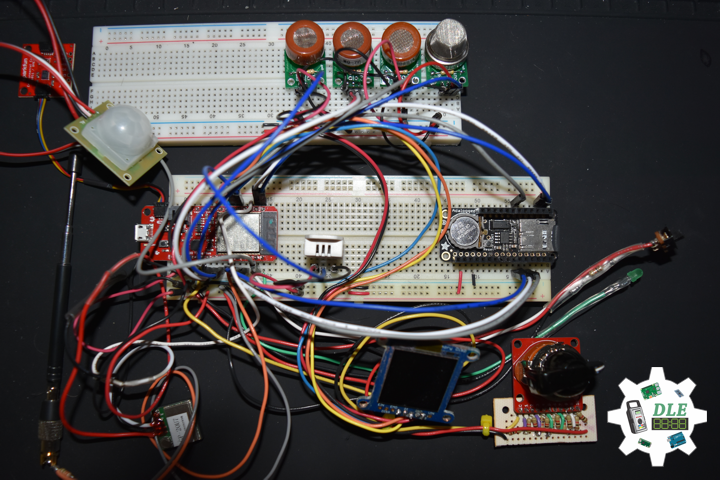
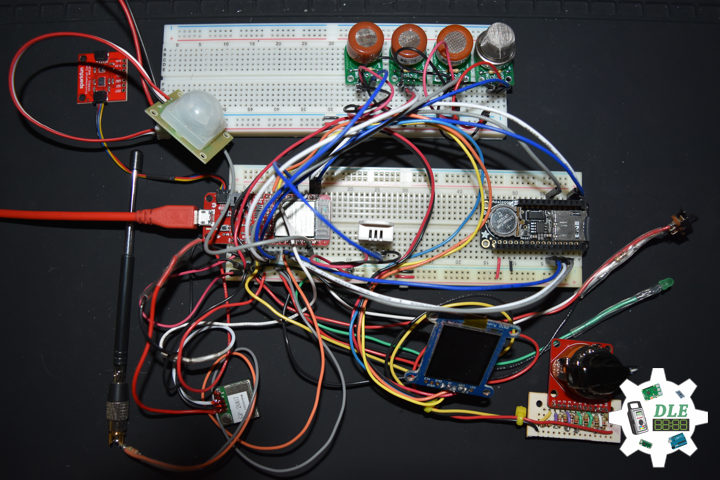
PIR Motion Sensor (JST)
SparkFun Item: SEN-13285
This is a simple to use motion sensor. Power it up and wait 1-2 seconds for the sensor to get a snapshot of the still room. If anything moves after that period, the ‘alarm’ pin will go low. The alarm pin is an open collector meaning you will need a pull up resistor on the alarm pin. The open drain setup allows multiple motion sensors to be connected on a single input pin. If any of the motion sensors go off, the input pin will be pulled low.
We’ve finally updated the connector! Gone is the old “odd” connector, now you will find a common 3-pin JST! This makes the PIR Sensor much more accessible for whatever your project may need. Red = Power, White = Ground, and Black = Alarm.
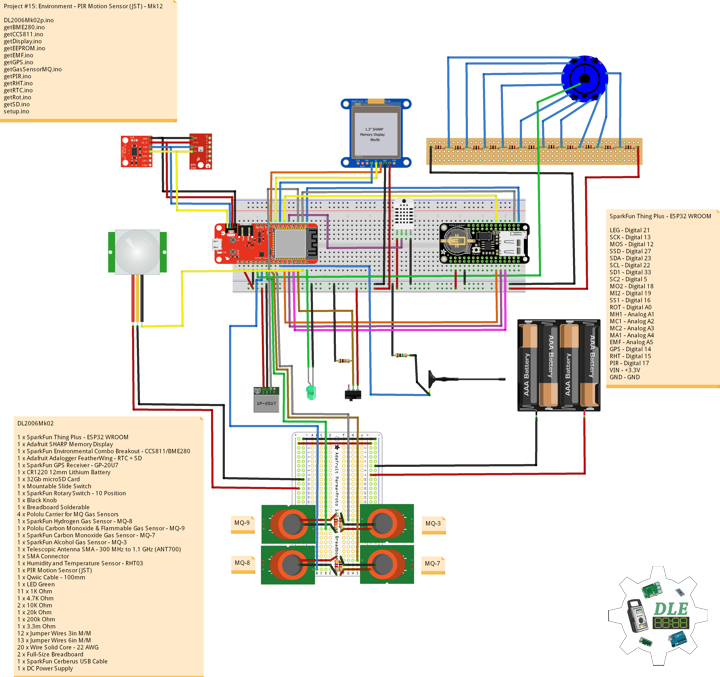
DL2006Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x Humidity and Temperature Sensor – RHT03
1 x PIR Motion Sensor (JST)
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
1 x 200k Ohm
1 x 3.3m Ohm
12 x Jumper Wires 3in M/M
13 x Jumper Wires 6in M/M
20 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A1
MH1 – Analog A0
MC1 – Analog A2
MC2 – Analog A3
MA1 – Analog A4
EMF – Analog A5
GPS – Digital 14
RHT – Digital 15
PIR – Digital 17
VIN – +3.3V
GND – GND
DL2006Mk02p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - PIR Motion Sensor (JST) - Mk12
// 06-02
// DL2006Mk02p.ino 15-12
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 4 x Pololu Carrier for MQ Gas Sensors
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x SparkFun Alcohol Gas Sensor - MQ-3
// 1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
// 1 x SMA Connector
// 1 x Humidity and Temperature Sensor - RHT03
// 1 x PIR Motion Sensor (JST)
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 2 x 10K Ohm
// 1 x 20k Ohm
// 1 x 200k Ohm
// 1 x 3.3m Ohm
// 12 x Jumper Wires 3in M/M
// 13 x Jumper Wires 6in M/M
// 20 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// RHT Humidity and Temperature Sensor
#include <SparkFun_RHT03.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A4;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// EMF Meter (Single Axis)
int iEMF = A5;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int valEMF = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
int iEMFDis = 0;
int iEMFRect = 0;
// RHT Humidity and Temperature Sensor
// RHT03 data pin Digital 15
const int RHT03_DATA_PIN = 15;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// PIR Motion
// Motion detector
const int iMotion = 17;
// Proximity
int proximity = LOW;
String Det = "";
// Software Version Information
String sver = "15-12";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// EMF Meter (Single Axis)
isEMF();
// RHT03 Humidity and Temperature Sensor
isRHT03();
// isPIR Motion
isPIR();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas H2 MQ8" );
display.setCursor(0,30);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,50);
display.println( "Gas CO MQ9" );
display.setCursor(0,70);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,90);
display.println( "Gas CO MQ7" );
display.setCursor(0,110);
display.print( iMQ7ppm );
display.println( " ppm" );
display.setCursor(0,130);
display.println( "BAC MQ3" );
display.setCursor(0,150);
display.print( iMQ3ppm );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
// EMF Meter (Single Axis)
void isDisplayEMF() {
// Text Display EMF Meter
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// EMF Meter
display.setCursor(0,10);
display.println( "EMF Meter" );
display.setCursor(0,30);
display.print( "EMF: " );
display.println( averageEMF );
display.setCursor(0,50);
display.println( iEMFDis );
display.setCursor(0,70);
display.setTextSize(1);
display.println( "0 1 2 3 4 5 6 7 8 9 10" );
display.setCursor(0,90);
display.drawRect(0, 90, iEMFRect , display.height(), BLACK);
display.fillRect(0, 90, iEMFRect , display.height(), BLACK);
// Refresh
display.refresh();
delay( 100 );
}
// Display PIR Motion
void isDisplayPIR() {
// Text Display PIR
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// PIR Motion
display.setCursor(0,10);
display.println( "PIR Motion" );
display.setCursor(0,30);
display.println( Det );
// Refresh
display.refresh();
delay( 100 );
}
// Display RHT
void isDisplayRHT() {
// Text Display RHT
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature
display.setCursor(0,10);
display.println( "Temp C" );
display.setCursor(0,30);
display.print( latestTempC );
display.println( "C" );
// Temp F
display.setCursor(0,60);
display.println( "Temp F" );
display.setCursor(0,80);
display.print( latestTempF );
display.println( "F" );
// Humidity
display.setCursor(0,110);
display.println( "Humidity" );
display.setCursor(0,130);
display.print( latestHumidity );
display.println( " %" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getEMF.ino
// EMF Meter (Single Axis)
// Setup EMF Meter
void isSetupEMF() {
// EMF Meter (Single Axis)
pinMode( iEMF, OUTPUT );
for (int i = 0; i < NUMREADINGS; i++){
readings[ i ] = 0; // Initialize all the readings to 0
}
}
// EMF Meter
void isEMF() {
// Probe EMF Meter
// Take a reading from the probe
valEMF = analogRead( iEMF );
// If the reading isn't zero, proceed
if( valEMF >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
valEMF = constrain( valEMF, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
valEMF = map( valEMF, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = valEMF;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If we're at the end of the array...
if ( indexEMF >= NUMREADINGS ) {
// Wrap around to the beginning
indexEMF = 0;
}
// Calculate the average
averageEMF = totalEMF / NUMREADINGS;
iEMFDis = averageEMF;
iEMFRect = map( averageEMF, 1, 1023, 1, 144 );
}
else
{
averageEMF = 0;
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
}
}
getRHT.ino
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
void setupRTH03() {
// RHT03 Humidity and Temperature Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT03 Humidity and Temperature Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// RHT03 Humidity and Temperature Sensor
isDisplayRHT();
break;
case 4:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 5:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 6:
// EMF Meter (Single Axis)
isDisplayEMF();
break;
case 7:
// Display PIR Motion
isDisplayPIR();
break;
case 8:
// Display UID
isDisplayUID();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|Latest Temp C|Latest Temp F|Latest Humidity|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7|Alcohol Gas Sensor MQ-3|EMF Meter (Single Axis)|PIR Motion
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + latestTempC + "|" + latestTempF + "|" + latestHumidity + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|" + iMQ9ppm + "|" + iMQ3ppm + "|" + averageEMF + "|" + Det + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
// EMF Meter (Single Axis) - Setup
isSetupEMF();
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
// PIR Motion
// Setup PIR
setupPIR();
delay( 5000 );
}
Technology Experience
- Single-Board Microcontrollers (Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
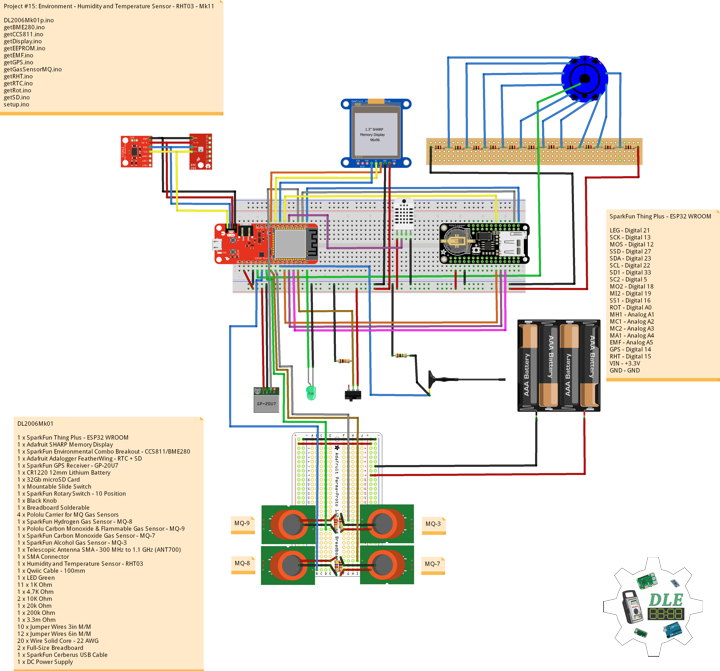
Project #15: Environment – Humidity and Temperature Sensor – RHT03 – Mk11
——
#DonLuc #Environment #ESP32 #MQ #GPS #EMF #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Consultant #Electronics #Microcontrollers #Vlog #Aphasia
——
——
——
——
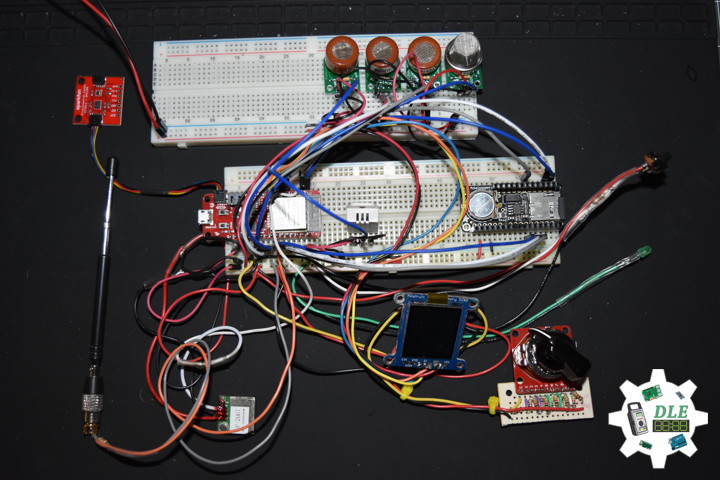
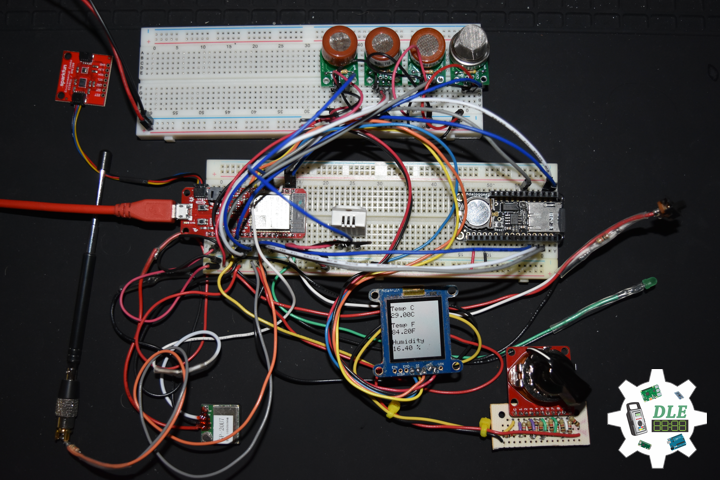
Humidity and Temperature Sensor – RHT03
SparkFun Item: SEN-10167
The RHT03 is a low cost humidity and temperature sensor with a single wire digital interface. The sensor is calibrated and doesn’t require extra components so you can get right to measuring relative humidity and temperature.
DL2006Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x Humidity and Temperature Sensor – RHT03
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
1 x 200k Ohm
1 x 3.3m Ohm
10 x Jumper Wires 3in M/M
12 x Jumper Wires 6in M/M
20 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A1
MH1 – Analog A0
MC1 – Analog A2
MC2 – Analog A3
MA1 – Analog A4
EMF – Analog A5
GPS – Digital 14
RHT – Digital 15
VIN – +3.3V
GND – GND
DL2006Mk01p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - Humidity and Temperature Sensor - RHT03 - Mk11
// 06-01
// DL2006Mk01p.ino 15-11
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 4 x Pololu Carrier for MQ Gas Sensors
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x SparkFun Alcohol Gas Sensor - MQ-3
// 1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
// 1 x SMA Connector
// 1 x Humidity and Temperature Sensor - RHT03
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 2 x 10K Ohm
// 1 x 20k Ohm
// 1 x 200k Ohm
// 1 x 3.3m Ohm
// 10 x Jumper Wires 3in M/M
// 12 x Jumper Wires 6in M/M
// 20 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// RHT Humidity and Temperature Sensor
#include <SparkFun_RHT03.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A4;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// EMF Meter (Single Axis)
int iEMF = A5;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int valEMF = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
int iEMFDis = 0;
int iEMFRect = 0;
// RHT Humidity and Temperature Sensor
// RHT03 data pin Digital 15
const int RHT03_DATA_PIN = 15;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// Software Version Information
String sver = "15-11";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// EMF Meter (Single Axis)
isEMF();
// RHT03 Humidity and Temperature Sensor
isRHT03();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas H2 MQ8" );
display.setCursor(0,30);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,50);
display.println( "Gas CO MQ9" );
display.setCursor(0,70);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,90);
display.println( "Gas CO MQ7" );
display.setCursor(0,110);
display.print( iMQ7ppm );
display.println( " ppm" );
display.setCursor(0,130);
display.println( "BAC MQ3" );
display.setCursor(0,150);
display.print( iMQ3ppm );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
// EMF Meter (Single Axis)
void isDisplayEMF() {
// Text Display EMF Meter
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// EMF Meter
display.setCursor(0,10);
display.println( "EMF Meter" );
display.setCursor(0,30);
display.print( "EMF: " );
display.println( averageEMF );
display.setCursor(0,50);
display.println( iEMFDis );
display.setCursor(0,70);
display.setTextSize(1);
display.println( "0 1 2 3 4 5 6 7 8 9 10" );
display.setCursor(0,90);
display.drawRect(0, 90, iEMFRect , display.height(), BLACK);
display.fillRect(0, 90, iEMFRect , display.height(), BLACK);
// Refresh
display.refresh();
delay( 100 );
}
// Display RHT
void isDisplayRHT() {
// Text Display RHT
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature
display.setCursor(0,10);
display.println( "Temp C" );
display.setCursor(0,30);
display.print( latestTempC );
display.println( "C" );
// Temp F
display.setCursor(0,60);
display.println( "Temp F" );
display.setCursor(0,80);
display.print( latestTempF );
display.println( "F" );
// Humidity
display.setCursor(0,110);
display.println( "Humidity" );
display.setCursor(0,130);
display.print( latestHumidity );
display.println( " %" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getEMF.ino
// EMF Meter (Single Axis)
// Setup EMF Meter
void isSetupEMF() {
// EMF Meter (Single Axis)
pinMode( iEMF, OUTPUT );
for (int i = 0; i < NUMREADINGS; i++){
readings[ i ] = 0; // Initialize all the readings to 0
}
}
// EMF Meter
void isEMF() {
// Probe EMF Meter
// Take a reading from the probe
valEMF = analogRead( iEMF );
// If the reading isn't zero, proceed
if( valEMF >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
valEMF = constrain( valEMF, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
valEMF = map( valEMF, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = valEMF;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If we're at the end of the array...
if ( indexEMF >= NUMREADINGS ) {
// Wrap around to the beginning
indexEMF = 0;
}
// Calculate the average
averageEMF = totalEMF / NUMREADINGS;
iEMFDis = averageEMF;
iEMFRect = map( averageEMF, 1, 1023, 1, 144 );
}
else
{
averageEMF = 0;
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getRHT.ino
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
void setupRTH03() {
// RHT03 Humidity and Temperature Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT03 Humidity and Temperature Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// RHT03 Humidity and Temperature Sensor
isDisplayRHT();
break;
case 4:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 5:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 6:
// EMF Meter (Single Axis)
isDisplayEMF();
break;
case 7:
// Display UID
isDisplayUID();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|Latest Temp C|Latest Temp F|Latest Humidity|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7|Alcohol Gas Sensor MQ-3|EMF Meter (Single Axis)
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + latestTempC + "|" + latestTempF + "|" + latestHumidity + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|" + iMQ9ppm + "|" + iMQ3ppm + "|" + averageEMF + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
// EMF Meter (Single Axis) - Setup
isSetupEMF();
// RHT03 Humidity and Temperature Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
delay( 5000 );
}
Technology Experience
- Single-Board Microcontrollers (Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
Project #15: Environment – EMF Meters – Mk10
——
#DonLuc #Environment #Microcontrollers #EMF #ESP32 #MQ #GPS #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Electronics #Consultant #Vlog #Aphasia
——
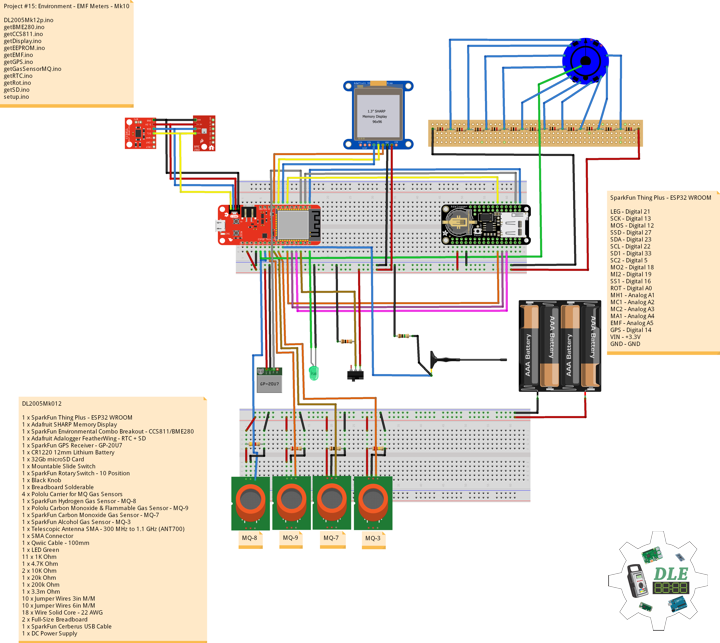
——
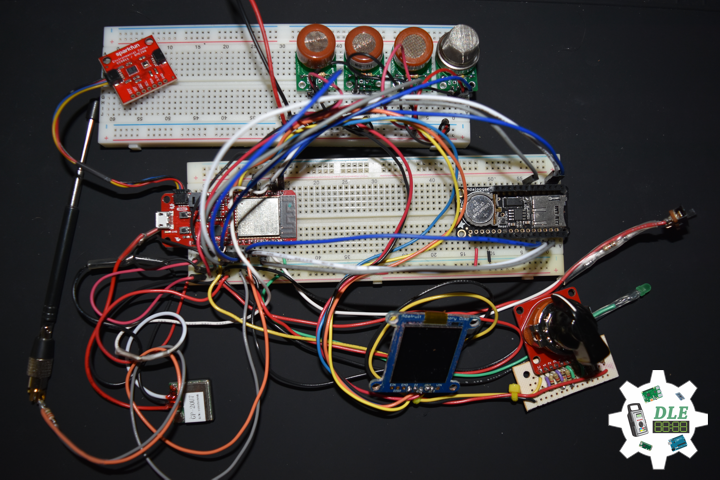
——
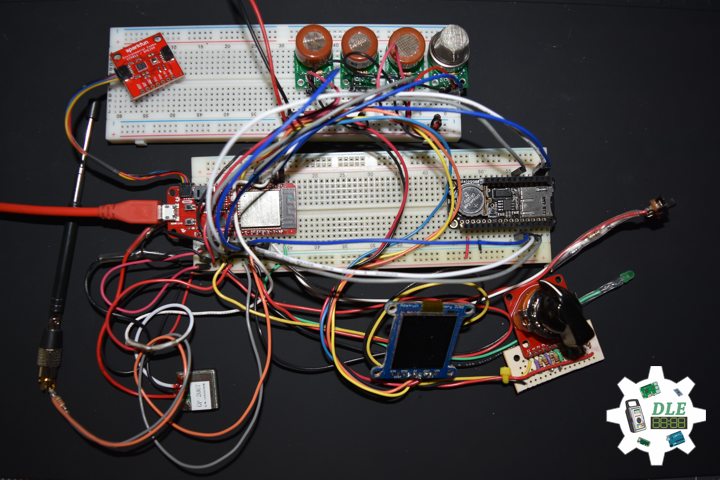
——
DL2005Mk012
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
1 x 200k Ohm
1 x 3.3m Ohm
10 x Jumper Wires 3in M/M
10 x Jumper Wires 6in M/M
18 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A1
MH1 – Analog A0
MC1 – Analog A2
MC2 – Analog A3
MA1 – Analog A4
EMF – Analog A5
GPS – Digital 14
VIN – +3.3V
GND – GND
DL2005Mk12p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - EMF Meters - Mk10
// 05-12
// DL2005Mk12p.ino 15-10
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 4 x Pololu Carrier for MQ Gas Sensors
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x SparkFun Alcohol Gas Sensor - MQ-3
// 1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
// 1 x SMA Connector
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 1 x 10K Ohm
// 1 x 20K Ohm
// 1 x 200k Ohm
// 1 x 3.3m Ohm
// 10 x Jumper Wires 3in M/M
// 10 x Jumper Wires 6in M/M
// 18 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A4;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// EMF Meter (Single Axis)
int iEMF = A5;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int valEMF = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
int iEMFDis = 0;
int iEMFRect = 0;
// Software Version Information
String sver = "15-10";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// EMF Meter (Single Axis)
isEMF();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas Sensors" );
display.setCursor(0,30);
display.println( "Gas H2 MQ8" );
display.setCursor(0,50);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,70);
display.println( "Gas CO MQ9" );
display.setCursor(0,90);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,110);
display.println( "Gas CO MQ7" );
display.setCursor(0,130);
display.print( iMQ7ppm );
display.println( " ppm" );
display.setCursor(0,150);
display.println( "BAC MQ3" );
display.setCursor(0,170);
display.print( iMQ3ppm );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
// EMF Meter (Single Axis)
void isDisplayEMF() {
// Text Display EMF Meter
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// EMF Meter
display.setCursor(0,10);
display.println( "EMF Meter" );
display.setCursor(0,30);
display.print( "EMF: " );
display.println( averageEMF );
display.setCursor(0,50);
display.println( iEMFDis );
display.setCursor(0,70);
display.setTextSize(1);
display.println( "0 1 2 3 4 5 6 7 8 9 10" );
display.setCursor(0,90);
display.drawRect(0, 90, iEMFRect , display.height(), BLACK);
display.fillRect(0, 90, iEMFRect , display.height(), BLACK);
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getEMF.ino
// EMF Meter (Single Axis)
// Setup EMF Meter
void isSetupEMF() {
// EMF Meter (Single Axis)
pinMode( iEMF, OUTPUT );
for (int i = 0; i < NUMREADINGS; i++){
readings[ i ] = 0; // Initialize all the readings to 0
}
}
// EMF Meter
void isEMF() {
// Probe EMF Meter
// Take a reading from the probe
valEMF = analogRead( iEMF );
// If the reading isn't zero, proceed
if( valEMF >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
valEMF = constrain( valEMF, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
valEMF = map( valEMF, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = valEMF;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If we're at the end of the array...
if ( indexEMF >= NUMREADINGS ) {
// Wrap around to the beginning
indexEMF = 0;
}
// Calculate the average
averageEMF = totalEMF / NUMREADINGS;
iEMFDis = averageEMF;
iEMFRect = map( averageEMF, 1, 1023, 1, 144 );
}
else
{
averageEMF = 0;
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 4:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 5:
// EMF Meter (Single Axis)
isDisplayEMF();
break;
case 6:
// Display UID
isDisplayUID();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7|Alcohol Gas Sensor MQ-3|EMF Meter (Single Axis)
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|" + iMQ9ppm + "|" + iMQ3ppm + "|" + averageEMF + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
// EMF Meter (Single Axis) - Setup
isSetupEMF();
delay( 5000 );
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
Project #14: Components – EMF Meters – Mk19
——
#DonLuc #Electronics #Components #EMF #Microcontrollers #Environment #SparkFun #Consultant #Vlog #Aphasia
——
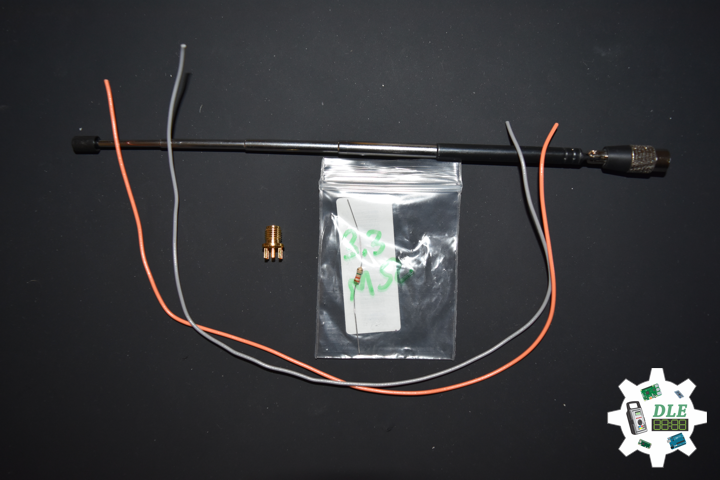
——
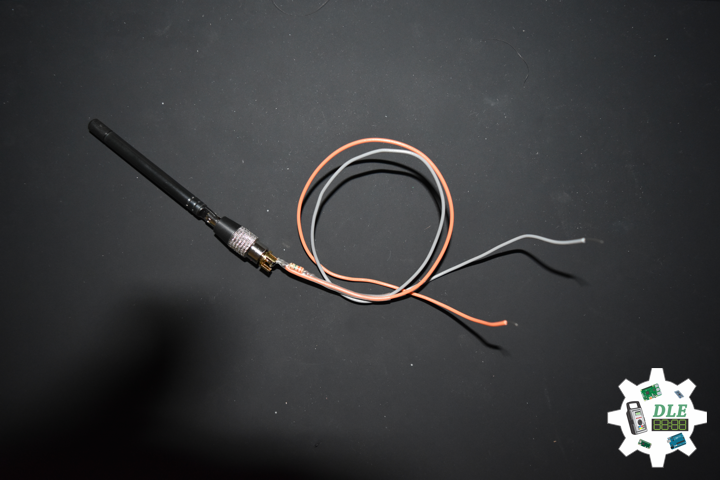
——
Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
SparkFun Item: WRL-13982
This ANT700 is a telescopic antenna designed for operation from 300 MHz to 1.1 GHz with a total length that is configurable from 9.5 cm to 24.5 cm. Each ANT700 is constructed of stainless steel and features an SMA male connector, rotating shaft, and adjustable elbow.
SMA Connector
SparkFun Item: WRL-00593
PCB edge mount – SMA RF connector. Perfect for prototyping with the GPS and Cellular devices that require an antenna connection. These connectors have a female signal pin and will correctly mate with the original SMA type antennas.
EMF Meter
An EMF meter is a scientific instrument for measuring electromagnetic fields. Most meters measure the electromagnetic radiation flux density or the change in an electromagnetic field over time, essentially the same as a radio antenna, but with quite different detection characteristics. Single axis meters are cheaper than tri-axis meters, but take longer to complete a survey because the meter only measures one dimension of the field. Single axis instruments have to be tilted and turned on all three axes to obtain a full measurement.
1 x Antenna SMA
1 x SMA Connector
1 x 3.3M Ohm
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc
Project #15: Environment – SparkFun Alcohol Gas Sensor – MQ-3 – Mk09
——
#DonLuc #Environment #Microcontrollers #ESP32 #MQ #GPS #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Electronics #Consultant #Vlog #Aphasia
——
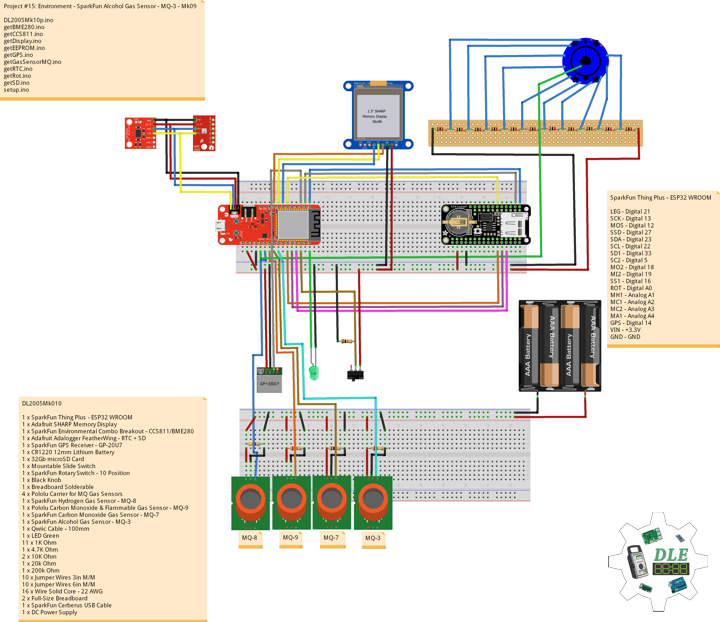
——
——
——
DL2005Mk010
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
1 x 220k Ohm
10 x Jumper Wires 3in M/M
10 x Jumper Wires 6in M/M
16 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A1
MH1 – Analog A0
MC1 – Analog A2
MC2 – Analog A3
MA1 – Analog A4
GPS – Digital 14
VIN – +3.3V
GND – GND
DL2005Mk10p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - SparkFun Alcohol Gas Sensor - MQ-3 - Mk09
// 05-09
// DL2005Mk10p.ino 15-09
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 4 x Pololu Carrier for MQ Gas Sensors
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x SparkFun Alcohol Gas Sensor - MQ-3
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 1 x 10K Ohm
// 1 x 20K Ohm
// 1 x 220k Ohm
// 10 x Jumper Wires 3in M/M
// 10 x Jumper Wires 6in M/M
// 16 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A4;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// Software Version Information
String sver = "15-09";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas H2 MQ8" );
display.setCursor(0,30);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,50);
display.println( "Gas CO MQ9" );
display.setCursor(0,70);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,90);
display.println( "Gas CO MQ7" );
display.setCursor(0,110);
display.print( iMQ7ppm );
display.println( " ppm" );
display.setCursor(0,130);
display.println( "BAC MQ3" );
display.setCursor(0,150);
display.print( iMQ3ppm );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * (3.3 / 4095);
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * (3.3 / 4095);
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * (3.3 / 4095);
double bac = RvRo * 0.21;
return bac;
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 4:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 5:
// Display UID
isDisplayUID();
break;
case 6:
// Z
isDisplayZ();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7|Alcohol Gas Sensor MQ-3
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|" + iMQ9ppm + "|" + iMQ3ppm + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #14: Components – SparkFun Alcohol Gas Sensor – MQ-3 – Mk18
——
#DonLuc #Electronics #Components #MQ3 #Microcontrollers #Environment #SparkFun #Consultant #Vlog #Aphasia
——
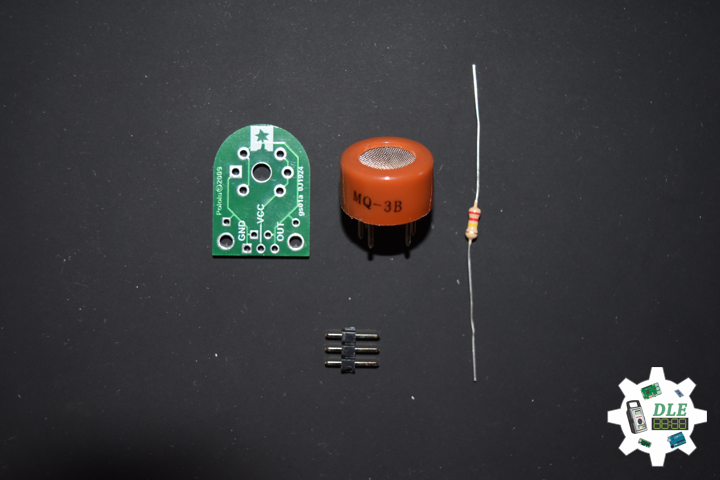
——

——
SparkFun Alcohol Gas Sensor – MQ-3
SparkFun Item: SEN-08880
This alcohol sensor is suitable for detecting alcohol concentration on your breath, just like your common breathalyzer. It has a high sensitivity and fast response time. Sensor provides an analog resistive output based on alcohol concentration. The drive circuit is very simple, all it needs is one resistor. A simple interface could be a 0-5V ADC. This sensor has a high sensitivity and fast response time. The sensor’s output is an analog resistance. The drive circuit is very simple; all you need to do is power the heater coil with 5V, add a load resistance, and connect the output to an ADC. This semiconductor gas sensor detects the presence of alcohol gas at concentrations from 0.04 mg/L to 4 mg/L, a range suitable for making a breathalyser. The sensor’s simple analog voltage interface requires only one analog input pin from your microcontroller.
To calculate estimated peak blood alcohol concentration (EBAC), a variation, including drinking period in hours, of the Widmark formula was used. The formula is:
EBAC = ( 0.806 × SD × 1.2 BW × Wt \ MR × DP ) × 10
Where:
-0.806 is a constant for body water in the blood (mean 80.6%)
-SD is the number of standard drinks, that being 10 grams of ethanol each
-1.2 is a factor to convert the amount in grams
-BW is a body water constant (0.58 for males and 0.49 for females)
-Wt is body weight (kilogram)
-MR is the metabolism constant (0.015 for males and 0.017 for females)
-DP is the drinking period in hours
-10 converts the result to permillage of alcohol
BAC% = Breath mg/L * 0.21
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x Pololu Carrier for MQ Gas Sensors
3 x Break Away Headers – Straight
1 x 220k Ohm
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc
Project #15: Environment – SparkFun Carbon Monoxide Gas Sensor – MQ-7 – Mk08
——
#DonLuc #Environment #Microcontrollers #ESP32 #MQ-X #GPS #SparkFun #Adafruit #Pololu #Fritzing #Programming #Arduino #Electronics #Consultant #Vlog #Aphasia
——
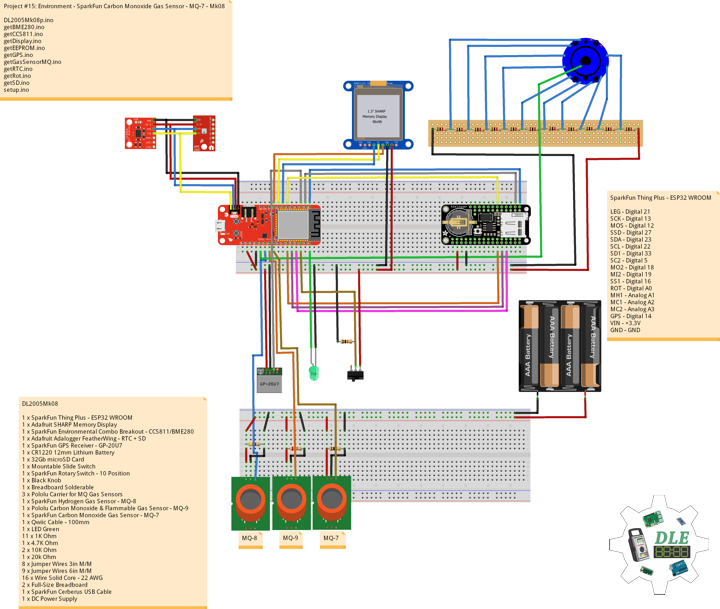
——
——
——
DL2005Mk08
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x SparkFun Environmental Combo Breakout – CCS811/BME280
1 x Adafruit Adalogger FeatherWing – RTC + SD
1 x SparkFun GPS Receiver – GP-20U7
1 x CR1220 12mm Lithium Battery
1 x 32Gb microSD Card
1 x Mountable Slide Switch
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
1 x Breadboard Solderable
3 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x Qwiic Cable – 100mm
1 x LED Green
11 x 1K Ohm
1 x 4.7K Ohm
2 x 10K Ohm
1 x 20k Ohm
8 x Jumper Wires 3in M/M
9 x Jumper Wires 6in M/M
16 x Wire Solid Core – 22 AWG
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x DC Power Supply
SparkFun Thing Plus – ESP32 WROOM
LEG – Digital 21
SCK – Digital 13
MOS – Digital 12
SSD – Digital 27
SDA – Digital 23
SCL – Digital 22
SD1 – Digital 33
SC2 – Digital 5
MO2 – Digital 18
MI2 – Digital 19
SS1 – Digital 16
ROT – Analog A0
MH1 – Analog A1
MC1 – Analog A2
MC2 – Analog A3
GPS – Digital 14
VIN – +3.3V
GND – GND
DL2005Mk08p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #15: Environment - SparkFun Carbon Monoxide Gas Sensor - MQ-7 - Mk08
// 05-08
// DL2005Mk08p.ino 15-08
// EEPROM with Unique ID
// 1 x SparkFun Thing Plus - ESP32 WROOM
// 1 x Adafruit SHARP Memory Display
// 1 x SparkFun Environmental Combo Breakout - CCS811/BME280
// 1 x Adafruit Adalogger FeatherWing - RTC + SD
// 1 x SparkFun GPS Receiver - GP-20U7
// 1 x CR1220 12mm Lithium Battery
// 1 x 32Gb microSD Card
// 1 x Mountable Slide Switch
// 1 x SparkFun Rotary Switch - 10 Position
// 1 x Black Knob
// 1 x Breadboard Solderable
// 3 x Pololu Carrier for MQ Gas Sensors
// 1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
// 1 x SparkFun Hydrogen Gas Sensor - MQ-8
// 1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
// 1 x Qwiic Cable - 100mm
// 1 x LED Green
// 11 x 1K Ohm
// 1 x 4.7K Ohm
// 1 x 10K Ohm
// 1 x 20K Ohm
// 8 x Jumper Wires 3in M/M
// 9 x Jumper Wires 6in M/M
// 16 x Wire Solid Core - 22 AWG
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x DC Power Supply
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// GPS Receiver
#include <TinyGPS++.h>
// Hardware Serial
#include <HardwareSerial.h>
// LED Green
int iLEDGreen = 21;
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here - 144x168
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices!
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEaltitudeM = 0;
float BMEpressure = 0;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Mountable Slide Switch
int iSS1 = 16;
// State
int iSS1State = 0;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 14
// This one is unused and doesnt have a conection
#define gpsTXPIN 32
// The TinyGPS++ object
TinyGPSPlus gps;
float TargetLat;
float TargetLon;
int GPSStatus = 0;
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
int x = 0;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A1;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet
// With these two points, a line is formed which is "approximately equivalent" to the original curve
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A2;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A3;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Software Version Information
String sver = "15-08";
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
void loop() {
// Receives NEMA data from GPS receiver
isGPS();
// Date and Time
isRTC();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Gas Sensors MQ
isGasSensor();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen
digitalWrite(iLEDGreen, HIGH );
// microSD Card
isSD();
} else {
// iLEDGreen
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// EEPROM Unique ID
display.setTextSize(1);
display.setCursor(0,130);
display.println( "EEPROM Unique ID" );
display.setTextSize(2);
display.setCursor(0,145);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(1);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,0);
display.println( "Temperature Celsius" );
display.setCursor(0,10);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,20);
display.println( "Humidity" );
display.setCursor(0,30);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,40);
display.println( "Altitude Meters" );
display.setCursor(0,50);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,60);
display.println( "Barometric Pressure" );
display.setCursor(0,70);
display.print( BMEpressure );
display.println( " Pa" );
// eCO2 Concentration
display.setCursor(0,80);
display.println( "eCO2 Concentration" );
display.setCursor(0,90);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,100);
display.println( "tVOC Concentration" );
display.setCursor(0,110);
display.print( CCS811TVOC );
display.println( " ppb" );
// Date
display.setCursor(0,120);
display.println( dateRTC );
// Time
display.setCursor(0,130);
display.println( timeRTC );
// GPS Status
display.setCursor(0,140);
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,150);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,160);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( dateRTC );
// Time
display.setCursor(0,30);
display.println( timeRTC );
// GPS Status
display.setCursor(0,60);
display.print( "GPS: " );
display.println( GPSStatus );
// Target Latitude
display.setCursor(0,80);
display.println( "Latitude" );
display.setCursor(0,100);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,120);
display.println( "Longitude" );
display.setCursor(0,140);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Gas Sensors MQ
void isDisplayMQ() {
// Text Display MQ
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Gas Sensors MQ
display.setCursor(0,10);
display.println( "Gas Sensors" );
display.setCursor(0,30);
display.println( "Gas H2 MQ8" );
display.setCursor(0,50);
display.print( iMQ8ppm );
display.println( " ppm" );
display.setCursor(0,70);
display.println( "Gas CO MQ9" );
display.setCursor(0,90);
display.print( iMQ9ppm );
display.println( " ppm" );
display.setCursor(0,110);
display.println( "Gas CO MQ7" );
display.setCursor(0,130);
display.print( iMQ7ppm );
display.println( " ppm" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1, gpsRXPIN, gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded.
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
displayInfo();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
TargetLat = gps.location.lat();
TargetLon = gps.location.lng();
GPSStatus = 2;
}
else
{
GPSStatus = 0;
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
isMQ8();
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
isMQ9();
// Carbon Monoxide Gas Sensor - MQ-7
isMQ7();
}
// Hydrogen Gas Sensor - MQ-8 - PPM
void isMQ8() {
double RvRo = iMQ8Raw * (3.3 / 1023);
iMQ8ppm = (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
void isMQ9() {
double RvRo = iMQ9Raw * (3.3 / 4095);
iMQ9ppm = 3.027*exp(1.0698*( RvRo ));
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7() {
double RvRo = iMQ7Raw * (3.3 / 4095);
iMQ7ppm = 3.027*exp(1.0698*( RvRo ));
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 9, 29, 12, 17, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
x = map(z, 0, 4095, 0, 9);
iRotVal = map(z, 0, 4095, 0, 10);
// Range Value
switch ( iRotVal ) {
case 0:
// Display Environmental
isDisplayEnvironmental();
break;
case 1:
// Display Date
isDisplayDate();
break;
case 2:
// Display BME280
isDisplayBME280();
break;
case 3:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 4:
// Display Gas Sensors MQ
isDisplayMQ();
break;
case 5:
// Display UID
isDisplayUID();
break;
case 6:
// Z
isDisplayZ();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|H2 Gas Sensor MQ-8|CO Gas Sensor MQ-9|CO Gas Sensor MQ-7
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSStatus + "|" + TargetLat + "|" + TargetLon + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + "|" + iMQ8ppm + "|" + iMQ9ppm + "|" + iMQ7ppm + "|\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup() {
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Display UID
isDisplayUID();
// Wire - Inialize I2C Hardware
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// microSD Card
setupSD();
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
Technology Experience
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
- Robotics
- Arduino
- Raspberry Pi
- Espressif
Follow Us
The Alpha Geek
Aphasia
https://www.donluc.com/?page_id=2149
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Don Luc