——
#DonLucElectronics #DonLuc #ETextiles #Wearable #FLORA #BME280 #CCS811 #CoinCell #RTC #SD #Arduino #Project #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Coin Cell Battery Holder – 2 x CR2032 (Enclosed)
This is a simple coin cell battery holder that can enclose two CR2032 batteries inside itself, and safely kept closed via two phillips head screws. Each battery holder will run batteries in series, output up to 6V, and is equipped with an On/Off slide switch and two 6″ power wires (one positive and one negative) on the back.
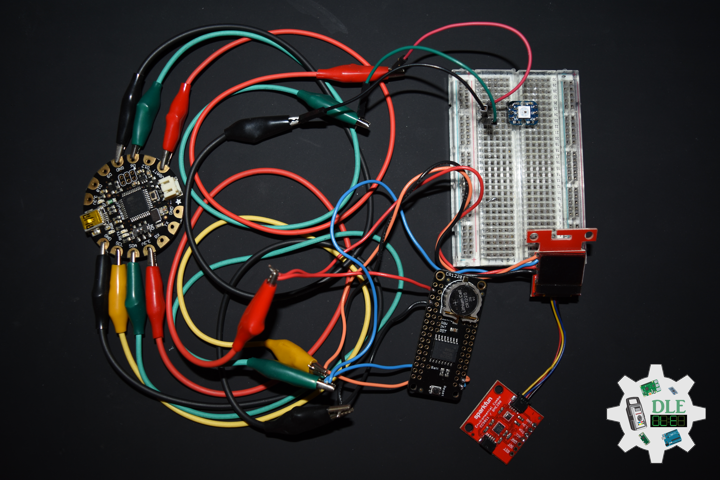
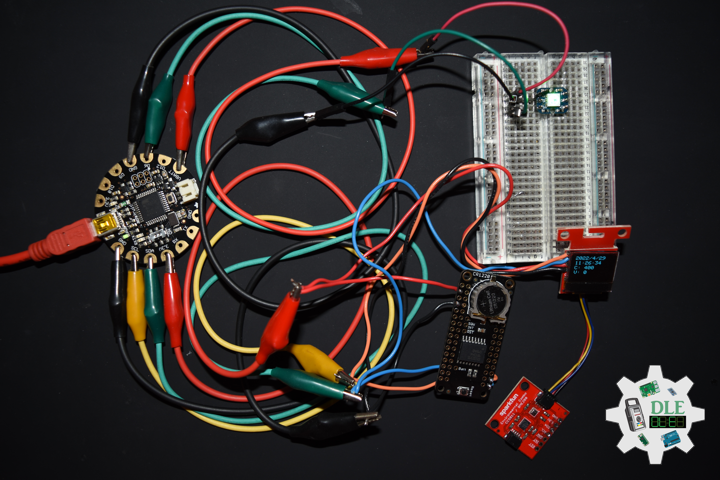
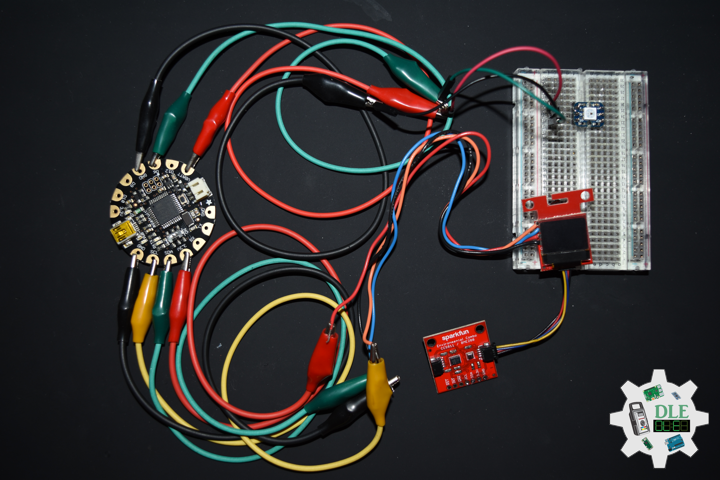
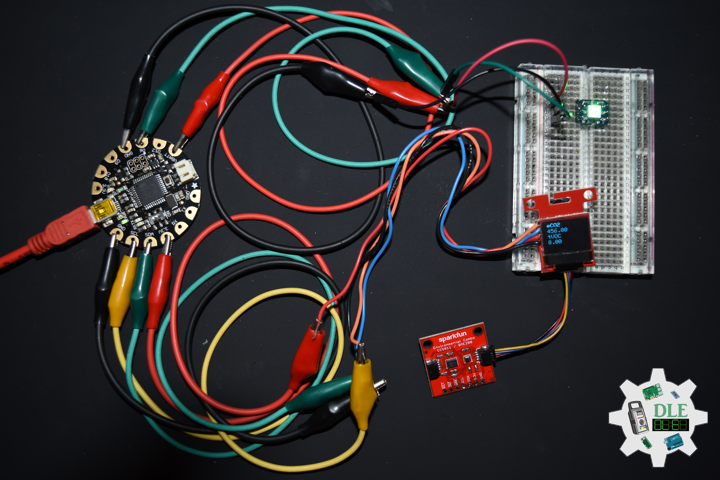
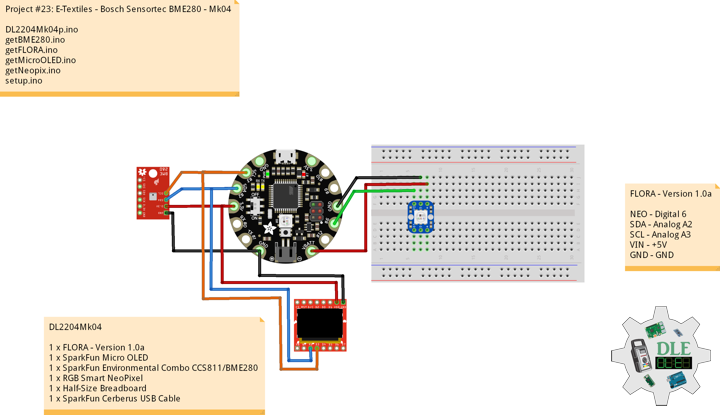
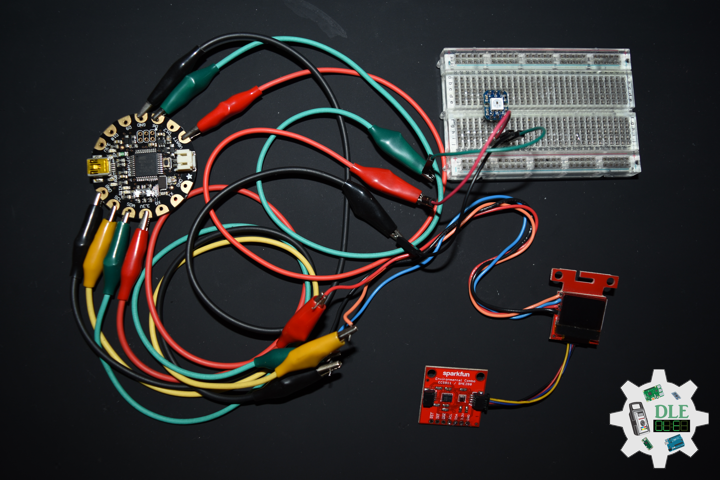
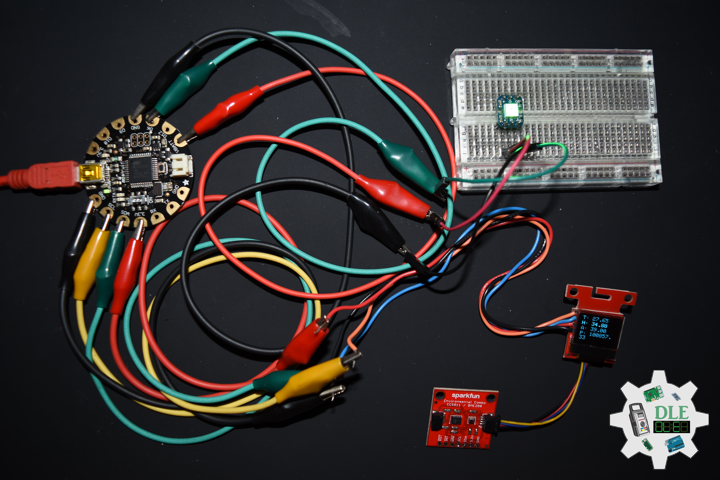
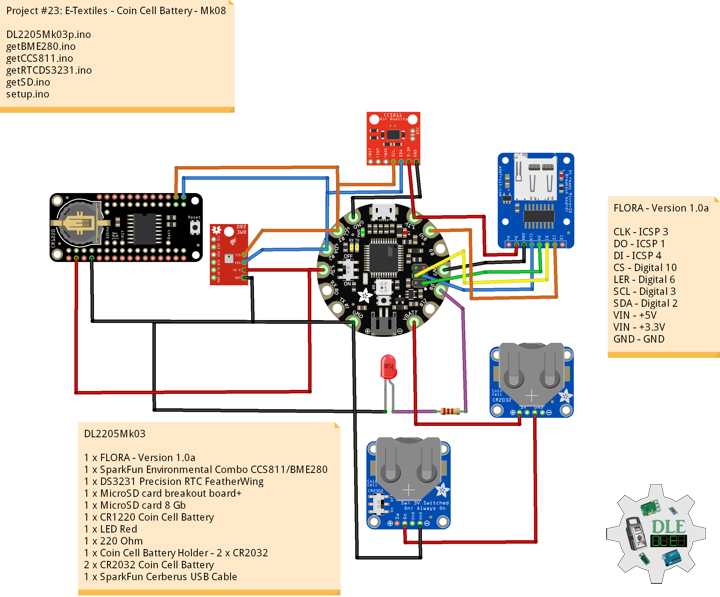
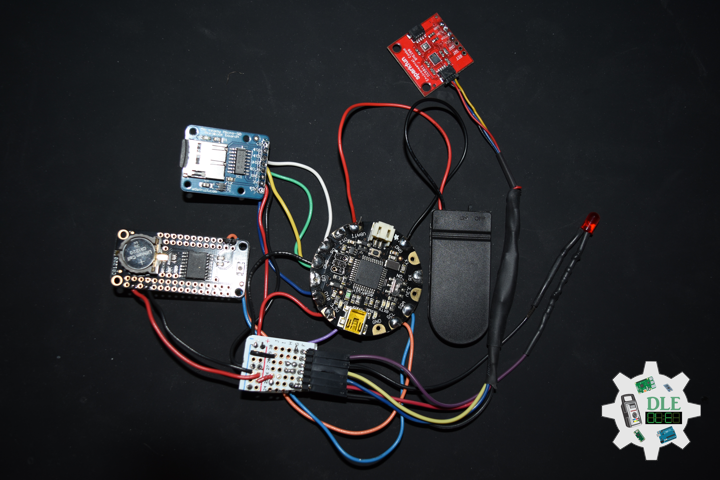
DL2205Mk03
1 x FLORA – Version 1.0a
1 x SparkFun Environmental Combo CCS811/BME280
1 x DS3231 Precision RTC FeatherWing
1 x MicroSD card breakout board+
1 x MicroSD card 8 Gb
1 x CR1220 Coin Cell Battery
1 x LED Red
1 x 220 Ohm
1 x Coin Cell Battery Holder – 2 x CR2032
2 x CR2032 Coin Cell Battery
1 x SparkFun Cerberus USB Cable
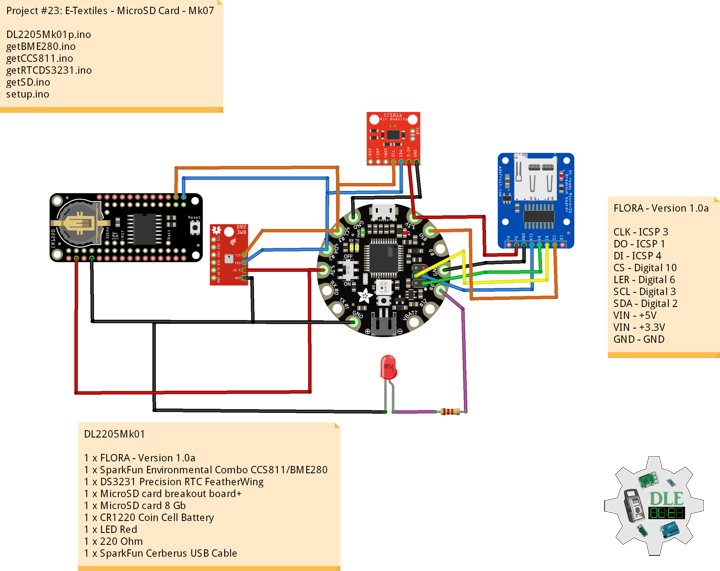
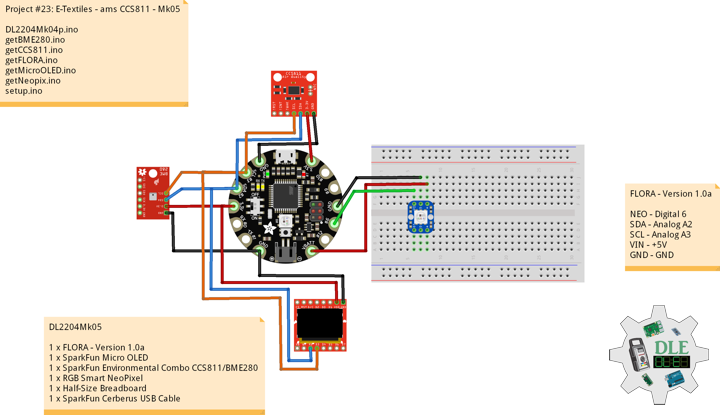
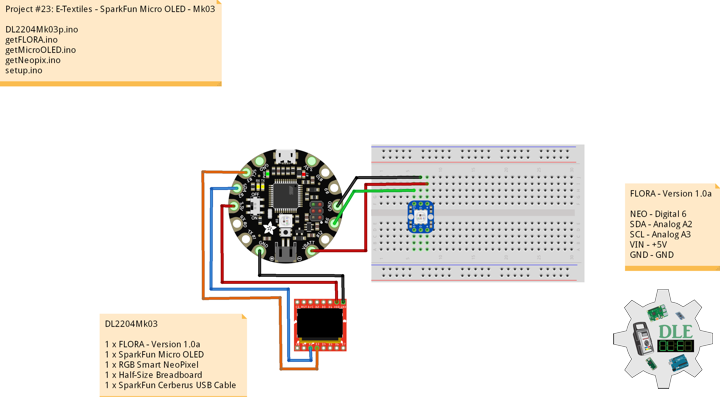
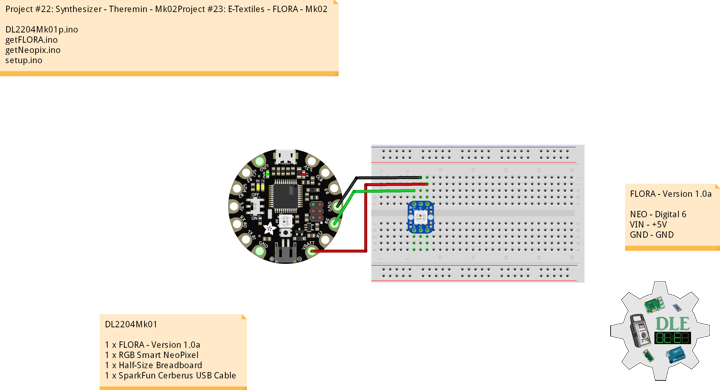
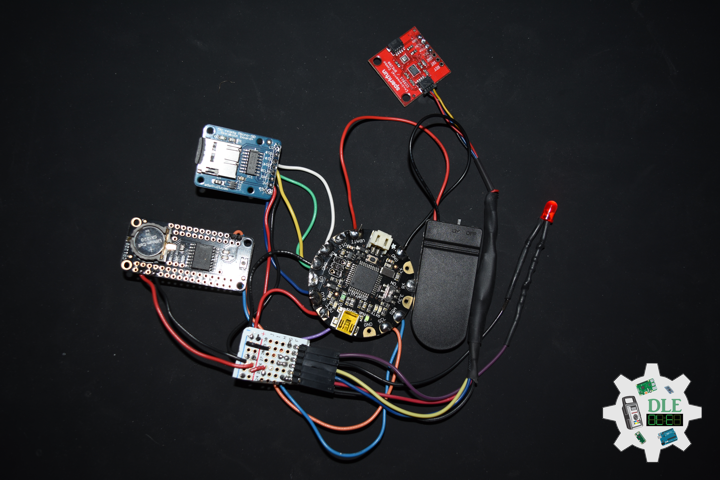
FLORA – Version 1.0a
CLK – ICSP 3
DO – ICSP 1
DI – ICSP 4
CS – Digital 10
LER – Digital 6
SCL – Digital 3
SDA – Digital 2
VIN – +5V
VIN – +3.3V
GND – GND
——
DL2205Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #23: E-Textiles - Coin Cell Battery - Mk08
23-08
DL2205Mk03p.ino
1 x FLORA - Version 1.0a
1 x SparkFun Environmental Combo CCS811/BME280
1 x DS3231 Precision RTC FeatherWing
1 x MicroSD card breakout board+
1 x MicroSD card 8 Gb
1 x CR1220 Coin Cell Battery
1 x LED Red
1 x 220 Ohm
1 x Coin Cell Battery Holder - 2 x CR2032
2 x CR2032 Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire
#include <Wire.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Date and time DS3231 RTC
#include <RTClib.h>
// Serial Peripheral Interface (SPI)
#include <SPI.h>
// Secure Digital (SD Card)
#include <SD.h>
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
String sDate;
String sTime;
// Secure Digital (SD Card)
const int chipSelect = 10;
String zzzzzz = "";
// LED Red
const int iLEDR = 6;
// Software Version Information
String sver = "23-08";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Dates and Time
timeRTC();
// MicroSD Card
isSD();
// 1 Seconds
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity() ;
// Altitude Meters
BMEaltitudeM = myBME280.readFloatAltitudeMeters();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin()) {
while (1);
}
DateTime now = RTC.now();
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2022, 4, 26, 11, 39, 0));
}
}
// timeRTC
void timeRTC() {
// DS3231 Precision RTC
sDate = "";
sTime = "";
// Date Time
DateTime now = RTC.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
// See if the card is present and can be initialized:
if (!SD.begin(chipSelect)) {
// Don't do anything more:
while (1);
}
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// Version|Date|Time|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure
//|eCO2 Concentration|tVOC Concentration|
zzzzzz = sver + "|" + sDate + "|" + sTime + "|"
+ BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|"
+ CCS811CO2 + "|" + CCS811TVOC + "|";
// Open the file. Note that only one file can be open at a time,
// so you have to close this one before opening another.
File dataFile = SD.open("DLE22Log.txt", FILE_WRITE);
// If the file is available, write to it:
if (dataFile) {
// Write
dataFile.println( zzzzzz );
dataFile.close();
}
}
setup.ino
// Setup
void setup() {
// Delay
delay( 100 );
// Set up I2C bus
Wire.begin();
// Delay
delay( 50 );
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// LED Red
pinMode( iLEDR , OUTPUT);
// Turn the LED Red on HIGH
digitalWrite( iLEDR , HIGH);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc