——
#DonLucElectronics #DonLuc #Sensors #TMP102 #LineSensor #AlcoholGasSensor #MinIMU9 #Pololu #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
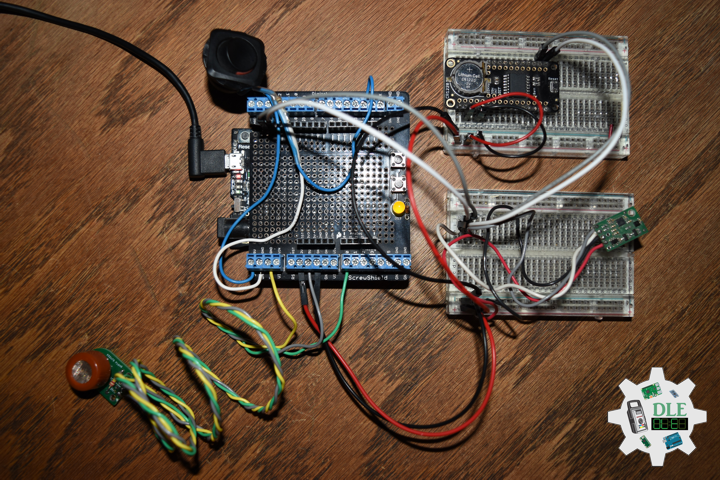
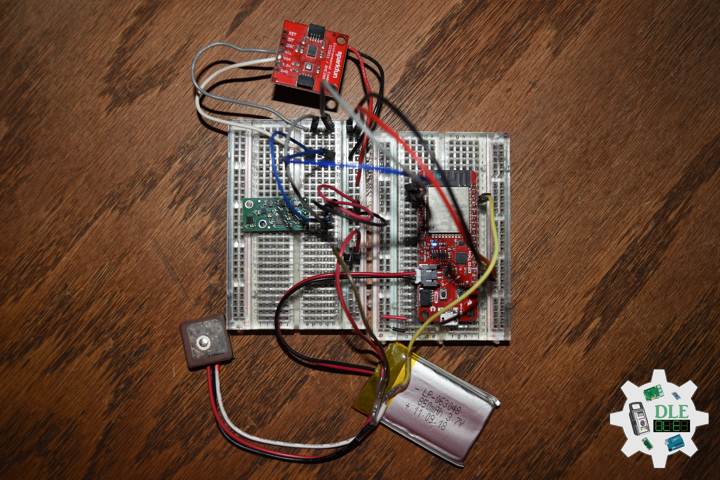
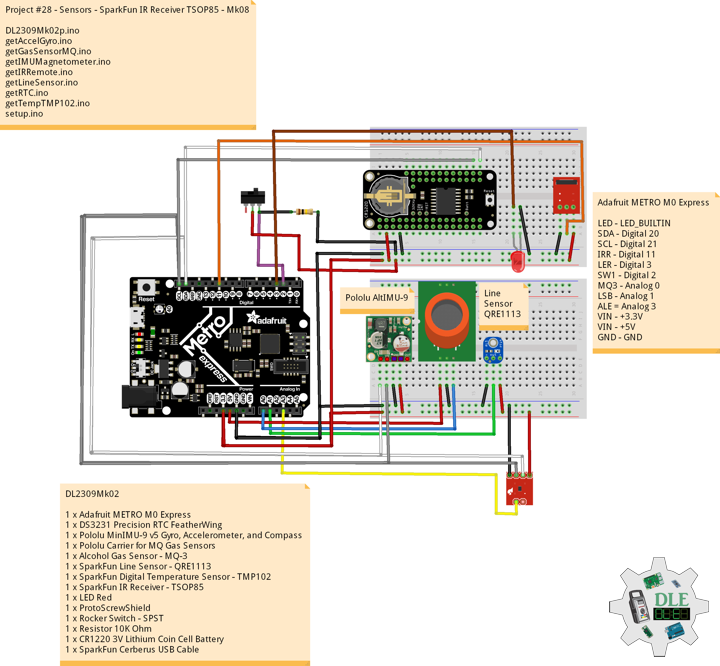
SparkFun IR Receiver – TSOP85
This is a very small infrared receiver based on the TSOP85 receiver from Vishay. This receiver has all the filtering and 38kHz demodulation built into the unit. Simply point a IR remote at the receiver, hit a button, and you’ll see a stream of 1s and 0s out of the data pin.
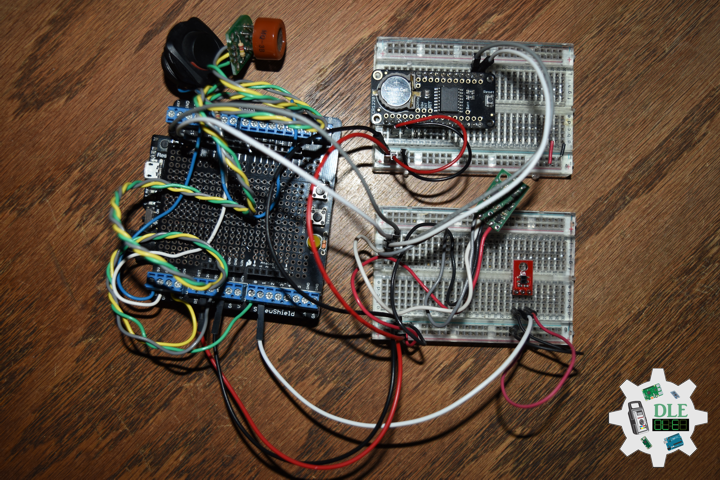
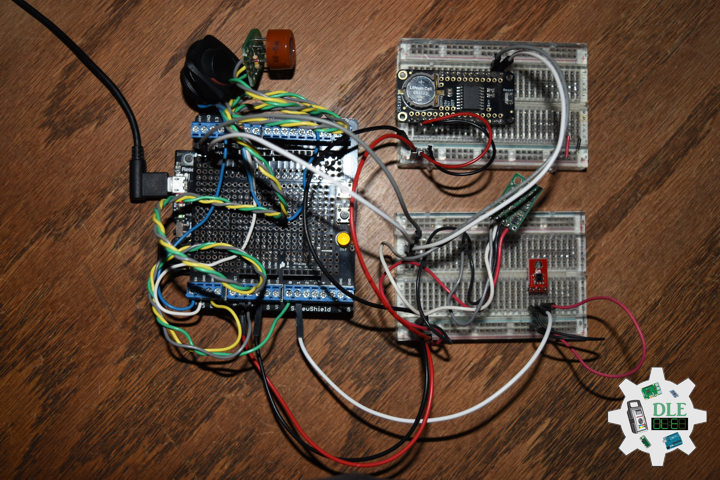
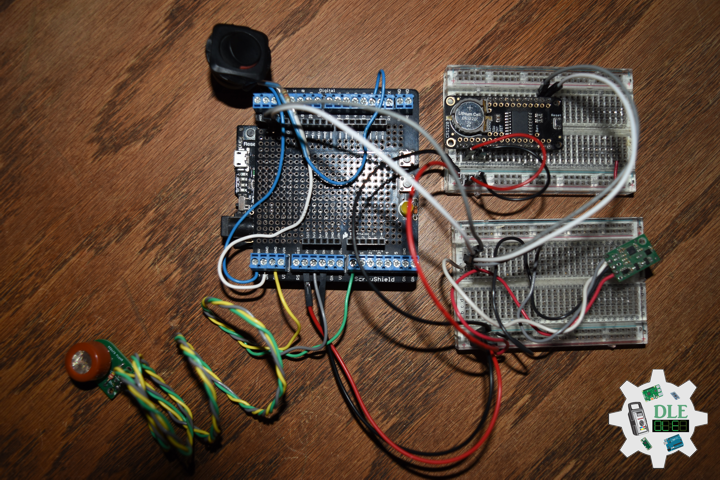
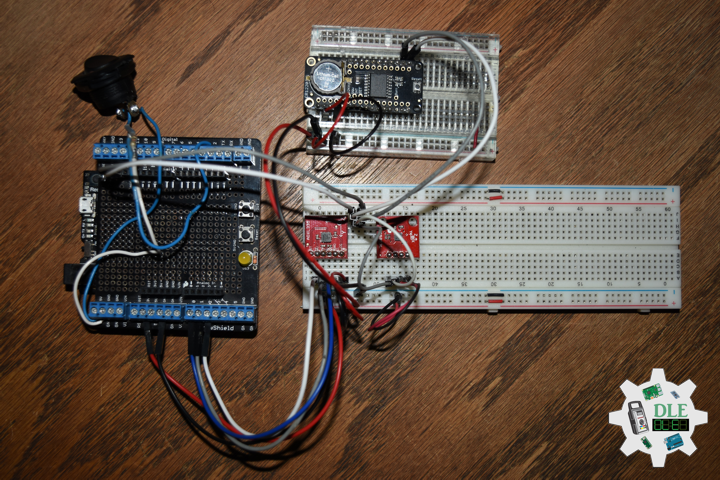
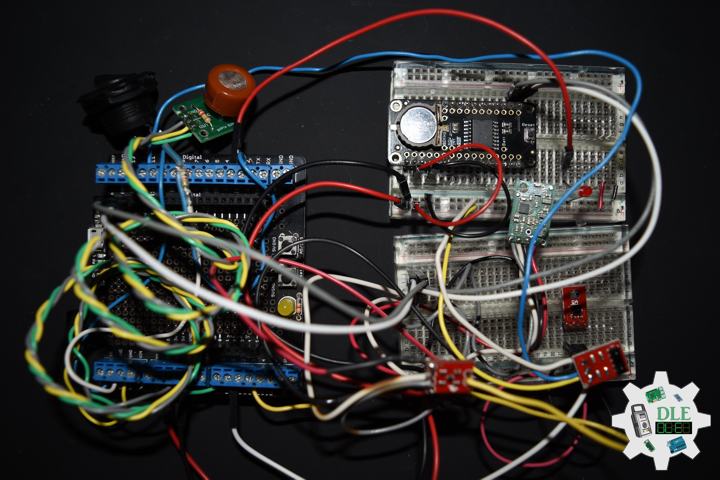
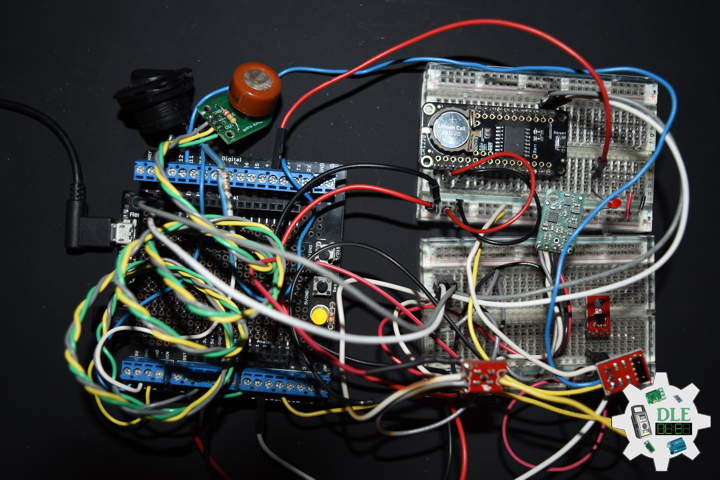
DL2309Mk02
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
1 x Pololu Carrier for MQ Gas Sensors
1 x Alcohol Gas Sensor – MQ-3
1 x SparkFun Line Sensor – QRE1113
1 x SparkFun Digital Temperature Sensor – TMP102
1 x SparkFun IR Receiver – TSOP85
1 x LED Red
1 x ProtoScrewShield
1 x Rocker Switch – SPST
2 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
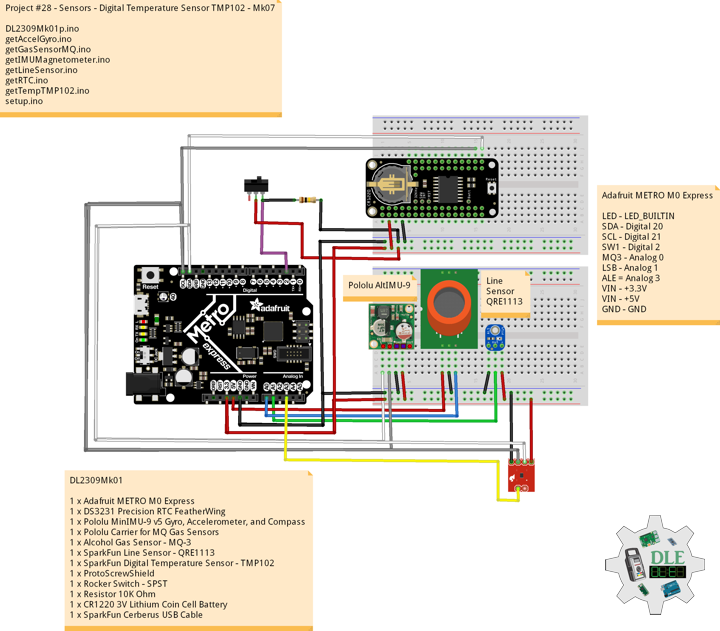
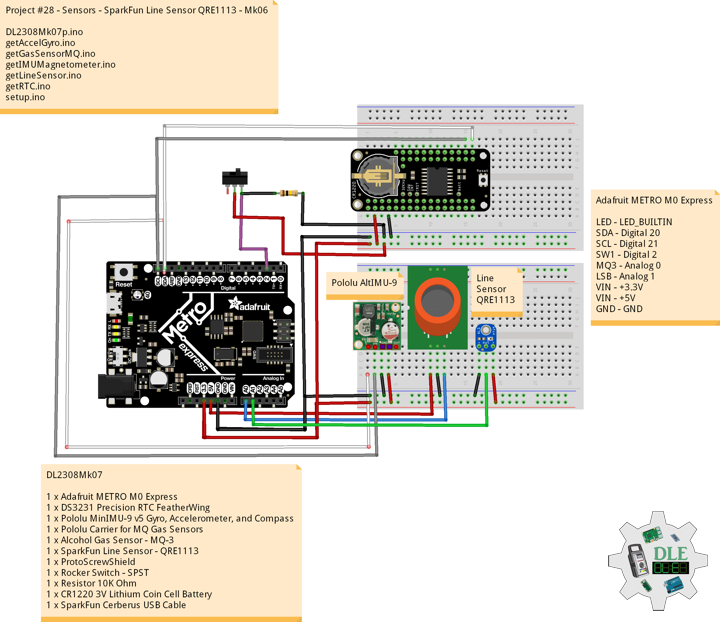
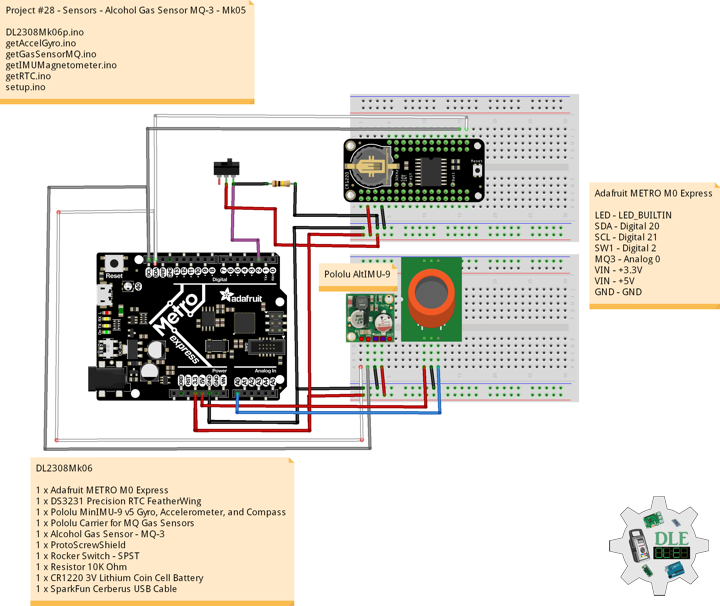
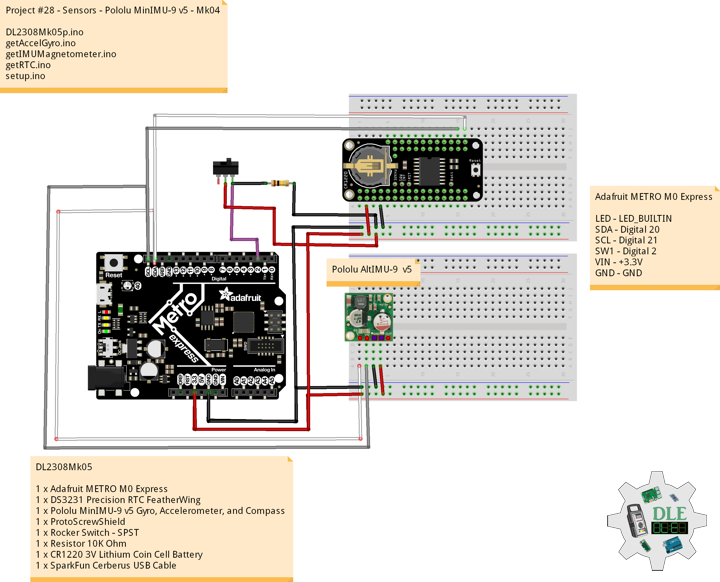
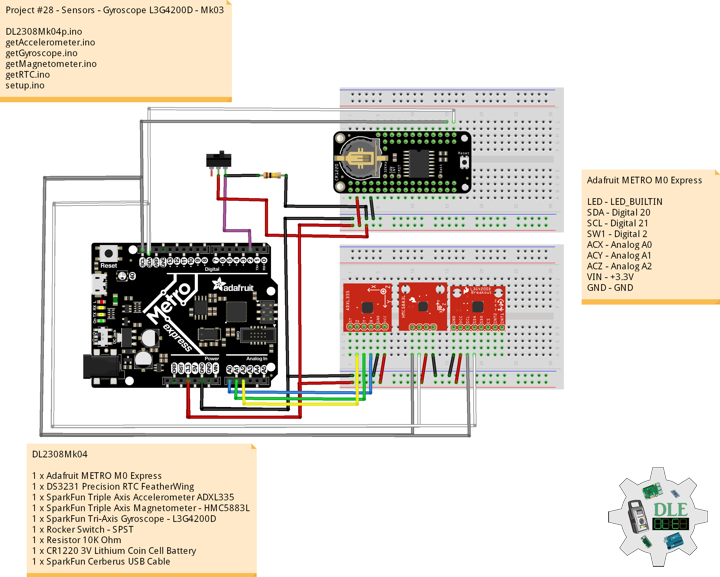
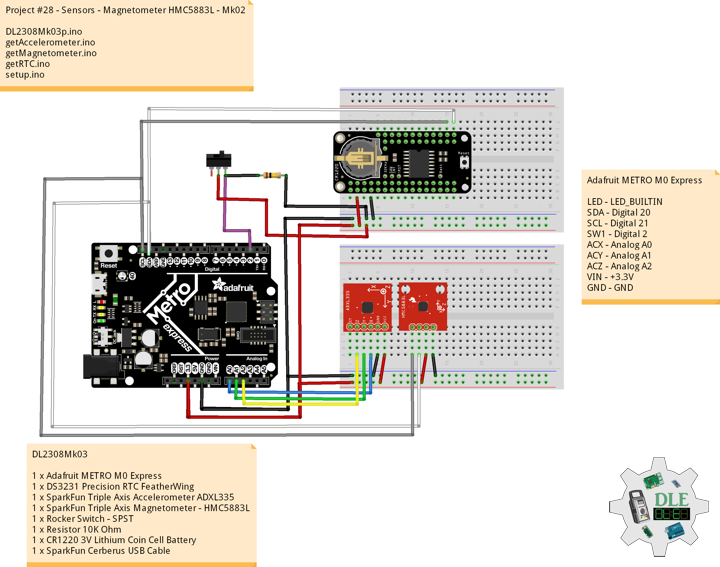
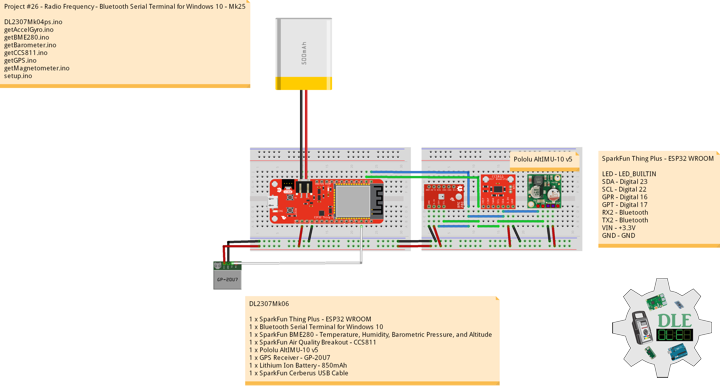
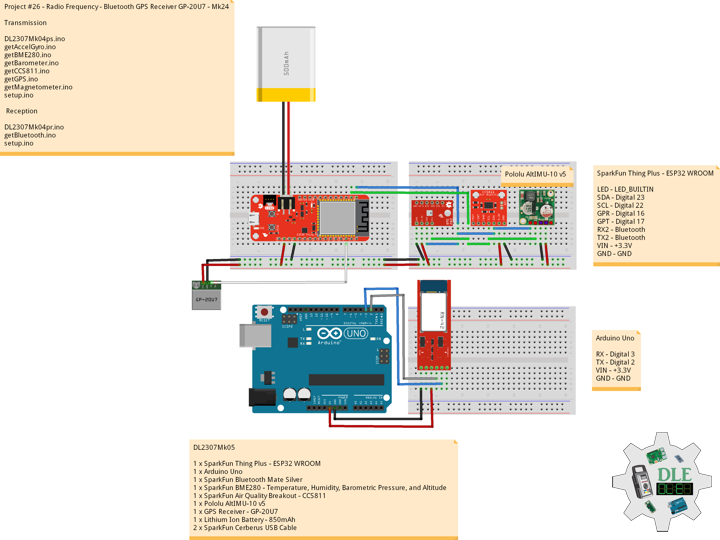
Adafruit METRO M0 Express
LED – LED_BUILTIN
SDA – Digital 20
SCL – Digital 21
IRR – Digital 11
LER – Digital 3
SW1 – Digital 2
MQ3 – Analog 0
LSB – Analog 1
ALE = Analog 3
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2309Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - SparkFun IR Receiver TSOP85 - Mk08
28-08
DL2309Mk02p.ino
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
1 x Pololu Carrier for MQ Gas Sensors
1 x Alcohol Gas Sensor - MQ-3
1 x SparkFun Line Sensor - QRE1113
1 x SparkFun Digital Temperature Sensor - TMP102
1 x SparkFun IR Receiver - TSOP85
1 x LED Red
1 x ProtoScrewShield
1 x Rocker Switch - SPST
2 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// DS3231 Precision RTC
#include <RTClib.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Keyboard
#include <Keyboard.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL Magnetometer
#include <LIS3MDL.h>
// SparkFun Digital Temperature Sensor TMP102
#include <SparkFunTMP102.h>
// SparkFun IR Receiver - TSOP85
#include <IRremote.h>
// Keyboard
String sKeyboard = "";
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Pololu 9DoF IMU
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL Magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// Gas Sensors MQ
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A0;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// SparkFun Line Sensor - QRE1113 (Analog)
int iLine = A1;
int iLineSensor = 0;
// SparkFun Digital Temperature Sensor TMP102
const int ALERT_PIN = A3;
TMP102 sensor0;
float temperature;
boolean alertPinState;
boolean alertRegisterState;
// SparkFun IR Receiver - TSOP85
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
String IRValue = "";
int iLEDRed = 3;
// The number of the Rocker Switch pin
int iSwitch = 2;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-08";
void loop() {
// Date and Time RTC
isRTC ();
// Pololu Accelerometer and Gyroscopes
isIMU();
// Pololu Magnetometer
isMag();
// Gas Sensors MQ
isGasSensor();
// SparkFun Line Sensor
isLineSensor();
// SparkFun Temperature TMP102
isTMP102();
// SparkFun IR Receiver - TSOP85
isIR();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
Keyboard.println(sKeyboard);
}
// Delay 1 Second
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// Keyboard
sKeyboard = sKeyboard + String(imuAX) + "|" + String(imuAY) + "|"
+ String(imuAZ) + "|";
sKeyboard = sKeyboard + String(imuGX) + "|" + String(imuGY) + "|"
+ String(imuGZ) + "|";
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
// Keyboard
sKeyboard = sKeyboard + String(iMQ3ppm) + "|";
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue;
// % BAC = breath mg/L * 0.21
double bac = RvRo * 0.21;
return bac;
}
getIMUMagnetometer.ino
// IMU Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// Keyboard
sKeyboard = sKeyboard + String(magX) + "|" + String(magY) + "|"
+ String(magZ) + "|";
}
getIRRemote.ino
// SparkFun IR Receiver - TSOP85
// Setup
void isSetupIR(){
// Initialize digital pin LED Red as an output
pinMode(iLEDRed, OUTPUT);
// Start the receiver
irrecv.enableIRIn();
}
//
void isIR(){
if (irrecv.decode(&results))
{
// LED Red HIGH
digitalWrite(iLEDRed, HIGH);
//Serial.print("IR RECV Code = 0x ");
//Serial.println(results.value, HEX);
IRValue = "0x ";
IRValue = IRValue + String(results.value, HEX);
// LED Red LOW
digitalWrite(iLEDRed, LOW);
// IR Resume
irrecv.resume();
}
else {
IRValue = "0";
}
// Keyboard
sKeyboard = sKeyboard + String(IRValue) + "|*";
}
getLineSensor.ino
// Line Sensor
// isLine Sensor
void isLineSensor(){
// Line Sensor
iLineSensor = analogRead(iLine);
// Keyboard
sKeyboard = sKeyboard + String(iLineSensor) + "|";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void setupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// Keyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC) + "|" +
String(timeRTC) + "|";
}
getTempTMP102.ino
// SparkFun Digital Temperature Sensor TMP102
// Setup TMP102
void isSetupTMP102(){
// Declare alertPin as an input
pinMode(ALERT_PIN,INPUT);
// Begin
//It will return true on success or false on failure to communicate
if(!sensor0.begin())
{
while(1);
}
// set the Conversion Rate
//0-3: 0:0.25Hz, 1:1Hz, 2:4Hz, 3:8Hz
sensor0.setConversionRate(2);
//set Extended Mode.
//0:12-bit Temperature(-55C to +128C) 1:13-bit Temperature(-55C to +150C)
sensor0.setExtendedMode(0);
// Set T_HIGH, the upper limit to trigger the alert on
// Set T_HIGH in C
sensor0.setHighTempC(29.4);
// Set T_LOW, the lower limit to shut turn off the alert
// set T_LOW in C
sensor0.setLowTempC(27.67);
}
// is TMP102
void isTMP102(){
// Turn sensor on to start temperature measurement.
// Current consumtion typically ~10uA.
sensor0.wakeup();
// read temperature data C
temperature = sensor0.readTempC();
// Check for Alert
// Read the Alert from pin
alertPinState = digitalRead(ALERT_PIN);
// Read the Alert from register
alertRegisterState = sensor0.alert();
// Place sensor in sleep mode to save power.
// Current consumtion typically <0.5uA.
sensor0.sleep();
// Keyboard
sKeyboard = sKeyboard + String(temperature) + "|" +
String(alertPinState) + "|" + String(alertRegisterState) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
setupRTC();
// Initialize control over the keyboard:
Keyboard.begin();
// Pololu Setup IMU
setupIMU();
// Pololu Setup Magnetometer
setupMag();
// Setup TMP102
isSetupTMP102();
// SetupTSOP85
isSetupIR();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc