Arduino
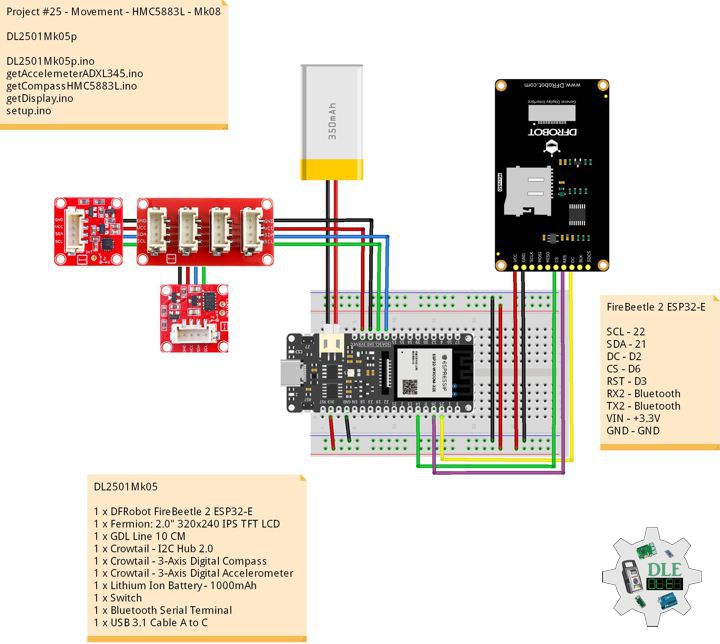
Project #25 – Movement – HMC5883L – Mk08
——
#DonLucElectronics #DonLuc #HMC5883L #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Crowtail – 3-Axis Digital Compass
Crowtail-3-Axis Compass module, a member of Crowtail family uses I²C based Honeywell HMC5883L digital compass. This ASIC is equipped with high resolution HMC118X magneto-resistive sensors and a 12-bit ADC. It provides compass heading accuracy up to 1° to 2°. Signal conditioning like amplification, automatic degaussing strap drivers and offset cancellation are inbuilt. This Crowtail module also includes a XC6206P332MR for power supply requirement. Hence user can connect any 3.3V to 6V DC power supply.
- -Crowtail compatible interface
- -3-Axis Magneto-resistive type sensors
- -I²C serial interface
- -1° to 2° Degree heading accuracy
- -Up to 116 Hz Maximum output rate
- -Built-In self test
- -Low cost compassing
- -Magnetometry
- -Pedestrian navigation
- -Hobby auto navigation
- -Compassing support for mobile devices and portable computers
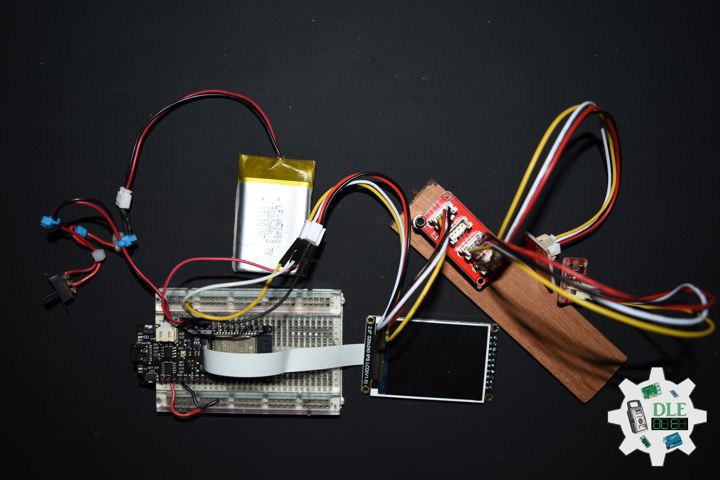
DL2501Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2501Mk05p
DL2501Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - HMC5883L - Mk08
25-08
DL2501Mk05p.ino
DL2501Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
String sver = "25-08";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Accelemeter ADXL345
screen.setCursor(0, 60);
screen.println("Compass HMC5883L");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
}
// Accelemeter ADXL345
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
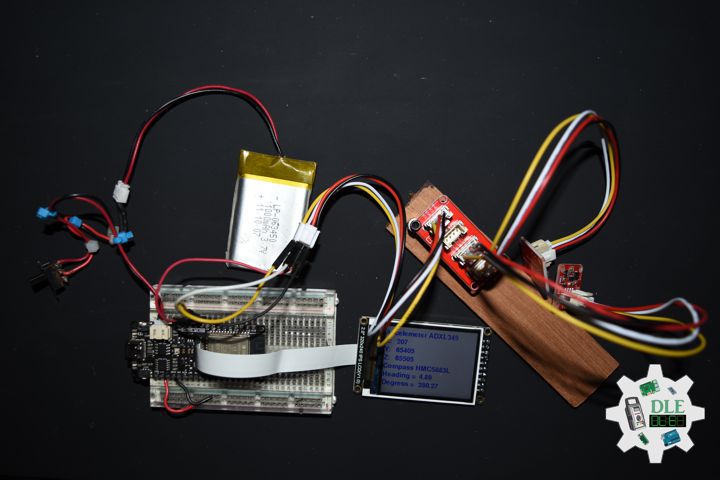
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk05");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
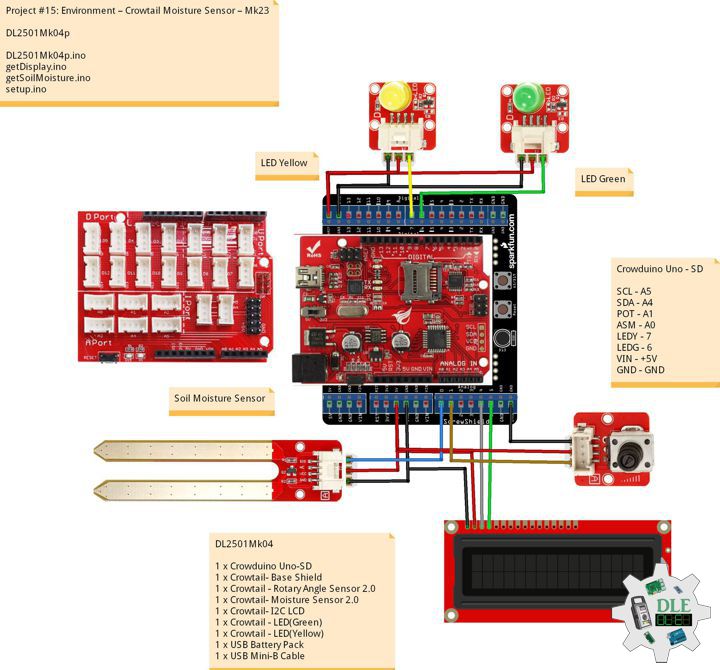
Project #15: Environment – Crowtail Rotary Angle Sensor – Mk23
——
#DonLucElectronics #DonLuc #Arduino #ASM #Display #Elecrow #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——

——
——
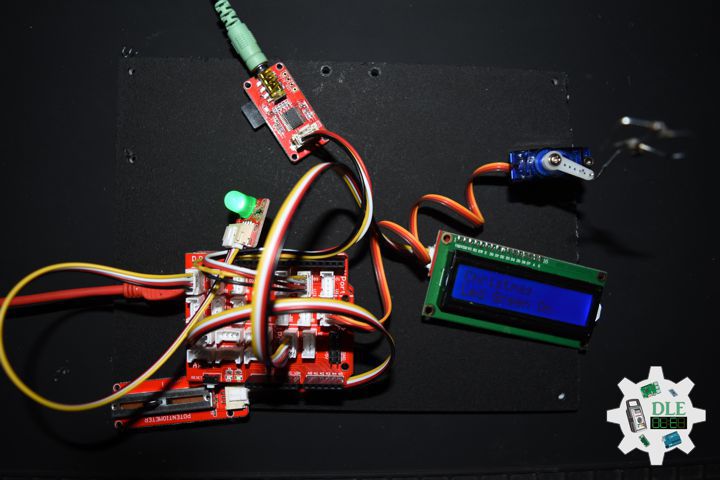
Crowtail – Rotary Angle Sensor 2.0
This rotary angle sensor may also be known as potentiometer that produces analog output between 0 and 3.3-5 Volt. The angular range is 300 degrees with a linear change in value. The resistance value is 10k ohms, perfect for Arduino use. Some applications like smart light control, volume control, only you can not think of things, no impossible things.
DL2501Mk04
1 x Crowduino Uno – SD
1 x Crowtail – Base Shield
1 x Crowtail – Rotary Angle Sensor 2.0
1 x Crowtail – Moisture Sensor 2.0
1 x Crowtail – I2C LCD
1 x Crowtail – LED(Green)
1 x Crowtail – LED(Yellow)
1 x USB Battery Pack
1 x USB Mini-B Cable
Crowduino Uno – SD
SCL – A5
SDA – A4
POT – A1
ASM – A0
LEDY – 7
LEDG – 6
VIN – +5V
GND – GND
DL2501Mk04p
DL2501Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #15: Environment – Crowtail Rotary Angle Sensor – Mk23
DL2501Mk04p.ino
DL2501Mk04
1 x Crowduino Uno - SD
1 x Crowtail - Base Shield
1 x Crowtail - Rotary Angle Sensor 2.0
1 x Crowtail - Moisture Sensor 2.0
1 x Crowtail - I2C LCD
1 x Crowtail - LED(Green)
1 x Crowtail - LED(Yellow)
1 x USB Battery Pack
1 x USB Mini-B Cable
*/
// Include the Library Code
// Wire
#include <Wire.h>
// Liquid Crystal
#include "LiquidCrystal.h"
// Potentiometer
int iPotentiometer = A1;
// Change Your Threshold Here
int Threshold = 0;
int zz = 0;
// Liquid Crystal
// Connect via i2c
LiquidCrystal lcd(0);
// Crowtail Moisture Sensor
int iSoilMoisture = A0;
int iSoilMoistureVal = 0;
// LED Yellow
int iLEDYellow = 7;
// LED Green
int iLEDGreen = 6;
// Software Version Information
String sver = "15-23";
void loop() {
// Crowtail Moisture Sensor
isSoilMoisture();
// Delay 1 Second
delay( 1000 );
}
getDisplay.ino
// getDisplay
// Crowbits - OLED 128X64 UID
void isDisplayUID(){
// Set up the LCD's number of rows and columns:
lcd.begin(16, 2);
// Print a message to the LCD.
// Cursor
lcd.setCursor(0, 0);
lcd.print("Don Luc Electron");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print( sver );
}
// isDisplay Green
void isDisplayG(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Humid Soil");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( iSoilMoistureVal );
}
// isDisplay Yellow
void isDisplayY(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Dry Soil");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( iSoilMoistureVal );
}
getSoilMoisture.ino
// Crowtail Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// Connect Soil Moisture Sensor to Analog 0
// iSoilMoistureVal => 0~700 Soil Moisture
iSoilMoistureVal = analogRead( iSoilMoisture );
// Threshold => 200~500
zz = analogRead( iPotentiometer );
Threshold = map( zz, 0, 1024, 200, 500);
// Threshold
if (iSoilMoistureVal > Threshold) {
// 300~700 - Humid Soil
// LED Yellow
digitalWrite(iLEDYellow, LOW);
// Display Green
isDisplayG();
// LED Green
digitalWrite(iLEDGreen, HIGH);
}
else {
// 0-300 Dry Soil
// LED Green
digitalWrite(iLEDGreen, LOW);
// Display Yellow
isDisplayY();
digitalWrite(iLEDYellow, HIGH);
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// Initialize the LED iLED Yellow
pinMode(iLEDYellow, OUTPUT);
// Initialize the LED LED Green
pinMode(iLEDGreen, OUTPUT);
// Display UID
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
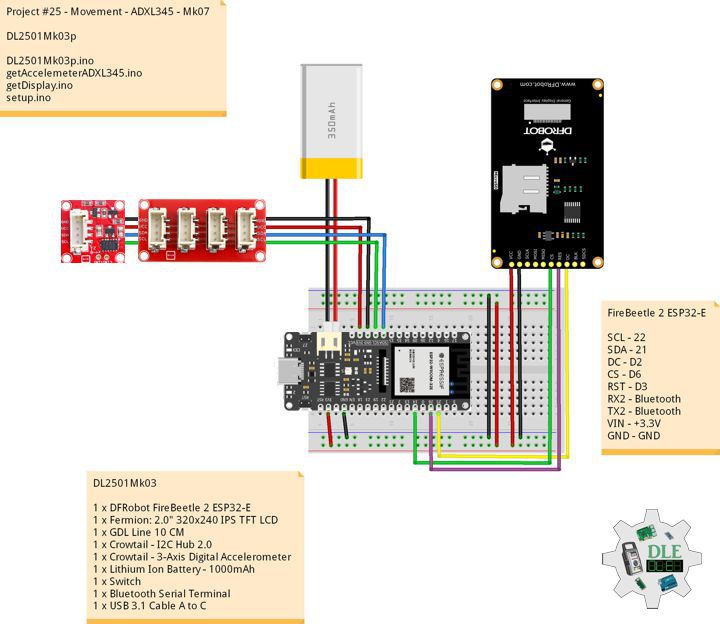
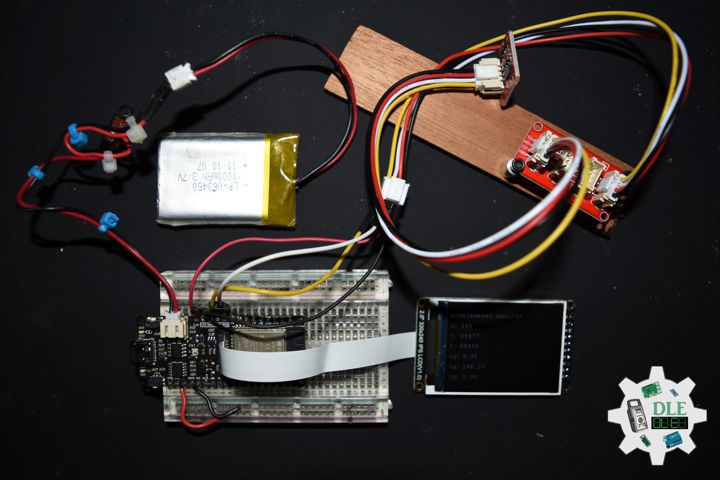
Project #25 – Movement – ADXL345 – Mk07
——
#DonLucElectronics #DonLuc #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Crowtail – 3-Axis Digital Accelerometer
Crowtail – 3-Axis Digital Accelerometer with specific Crowtail interface, It’s base on an advanced 3-axis IC ADXL345. This is a high resolution digital accelerometer providing you at max 3.9mg/LSB resolution and large ±16g measurement range. Have no worry to implement it into your free-fall detection project, cause it’s robust enough to survive up to 10,000g shock. Meanwhile, it’s agile enough to detect single and double taps. It’s ideal for motion detection, gesture detection as well as robotics. This digital 3-axis accelerometer has excellent EMI protection.
Its variable output makes it suitable for a wide range of applications:
- 1. HDD shock protection
- 2. Vibration sensor
- 3. Game controller input
- 4. Robotics
- 5. Smart vehicles
- 6. Anywhere you need to obtain motion-sensing and orientation information.
- 7. The excellent sensitivity provide high-precision output up to ±16g.
DL2501Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2501Mk03p
DL2501Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - ADXL345 - Mk07
25-07
DL2501Mk03p.ino
DL2501Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
String sver = "25-07";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output x,y,z values
Serial.print("Values of X , Y , Z: ");
Serial.print(x);
Serial.print(" , ");
Serial.print(y);
Serial.print(" , ");
Serial.println(z);
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// Accelemeter ADXL345
isDisplayADXL345();
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
Serial.print("X=");
Serial.print(ax);
Serial.println(" g");
Serial.print("Y=");
Serial.print(ay);
Serial.println(" g");
Serial.print("Z=");
Serial.println(az);
Serial.println(" g");
Serial.println("**********************");
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Accelemeter ADXL345
screen.setCursor(0, 60);
screen.println("Accelemeter ADXL345");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
}
// Accelemeter ADXL345
void isDisplayADXL345(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(30, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(30, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(30, 120);
screen.println( z );
// Standard Gravity
// Accelemeter ADXL345 Xg
screen.setCursor(0, 150);
screen.println( "Xg: " );
screen.setCursor(40, 150);
screen.println( ax );
// Accelemeter ADXL345 Yg
screen.setCursor(0, 180);
screen.println( "Yg: " );
screen.setCursor(40, 180);
screen.println( ay );
// Accelemeter ADXL345 Zg
screen.setCursor(0, 210);
screen.println( "Zg: " );
screen.setCursor(40, 210);
screen.println( az );
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk03");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
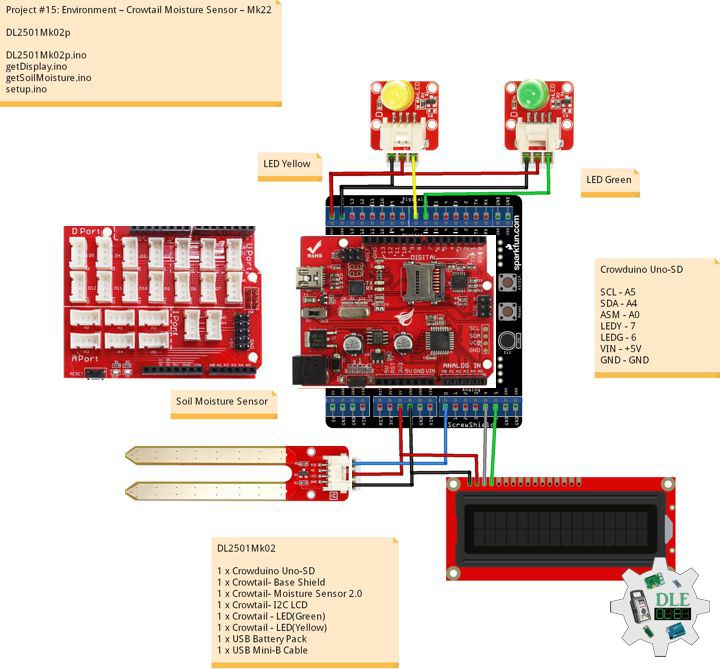
Project #15: Environment – Crowtail Moisture Sensor – Mk22
——
#DonLucElectronics #DonLuc #Arduino #ASM #Display #Elecrow #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
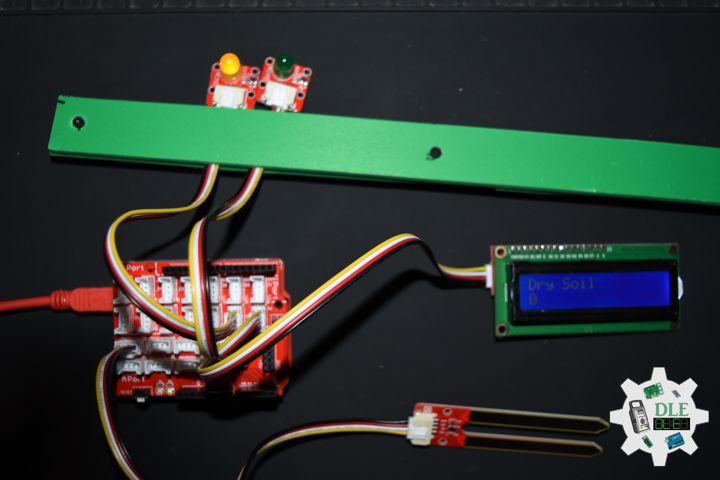
Crowtail Moisture Sensor 2.0
This Moisture Sensor can be used to detect the moisture of soil and thus to monitor if the plants in your garden need some water. This sensor uses the two probes to pass current through the soil, and then it reads then resistance to get the moisture level. More water makes the soil conduct electricity more easily (less resistance), while dry soil conducts electricity poorly (more resistance). Compares to the other moistures sensor using the same moisture test method, this module has super long legs, making it suitable for actual applications. This Moisture Sensor can be used to detect the moisture of soil or your pet plant’s water level, let the plants in your garden reach out for human help.
Crowtail – I2C LCD
A new crowtail for LCD1602, it contains LCD1602 and MCP23008 module. Unique interface for crowtail. Provide convenience to work with a LCD.
DL2501Mk02
1 x Crowduino Uno – SD
1 x Crowtail – Base Shield
1 x Crowtail – Moisture Sensor 2.0
1 x Crowtail – I2C LCD
1 x Crowtail – LED(Green)
1 x Crowtail – LED(Yellow)
1 x USB Battery Pack
1 x USB Mini-B Cable
Crowduino Uno – SD
SCL – A5
SDA – A4
ASM – A0
LEDY – 7
LEDG – 6
VIN – +5V
GND – GND
DL2501Mk02p
DL2501Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #15: Environment – Crowtail Moisture Sensor – Mk22
15-22
DL2501Mk02p.ino
DL2501Mk02
1 x Crowduino Uno - SD
1 x Crowtail - Base Shield
1 x Crowtail - Moisture Sensor 2.0
1 x Crowtail - I2C LCD
1 x Crowtail - LED(Green)
1 x Crowtail - LED(Yellow)
1 x USB Battery Pack
1 x USB Mini-B Cable
*/
// Include the Library Code
// Wire
#include <Wire.h>
// Liquid Crystal
#include "LiquidCrystal.h"
// Liquid Crystal
// Connect via i2c
LiquidCrystal lcd(0);
// Crowtail Moisture Sensor
int iSoilMoisture = A0;
int iSoilMoistureVal = 0;
// Change Your Threshold Here
int Threshold = 300;
// LED Yellow
int iLEDYellow = 7;
// LED Green
int iLEDGreen = 6;
// Software Version Information
String sver = "15-22";
void loop() {
// Crowtail Moisture Sensor
isSoilMoisture();
// Delay 1 Second
delay( 1000 );
}
getDisplay.ino
// getDisplay
// Crowbits - OLED 128X64 UID
void isDisplayUID(){
// Set up the LCD's number of rows and columns:
lcd.begin(16, 2);
// Print a message to the LCD.
// Cursor
lcd.setCursor(0, 0);
lcd.print("Don Luc Electron");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print( sver );
}
// isDisplay Green
void isDisplayG(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Humid Soil");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( iSoilMoistureVal );
}
// isDisplay Yellow
void isDisplayY(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Dry Soil");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( iSoilMoistureVal );
}
getSoilMoisture.ino
// Crowtail Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// Connect Soil Moisture Sensor to Analog 0
// iSoilMoistureVal => 0~700 Soil Moisture
iSoilMoistureVal = analogRead( iSoilMoisture );
// Threshold
if (iSoilMoistureVal > Threshold) {
// 300~700 - Humid Soil
// LED Yellow
digitalWrite(iLEDYellow, LOW);
// Display Green
isDisplayG();
// LED Green
digitalWrite(iLEDGreen, HIGH);
}
else {
// 0-300 Dry Soil
// LED Green
digitalWrite(iLEDGreen, LOW);
// Display Yellow
isDisplayY();
digitalWrite(iLEDYellow, HIGH);
}
}
setup.ino
void setup()
{
// Delay
delay(100);
// Initialize the LED iLED Yellow
pinMode(iLEDYellow, OUTPUT);
// Initialize the LED LED Green
pinMode(iLEDGreen, OUTPUT);
// Display UID
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
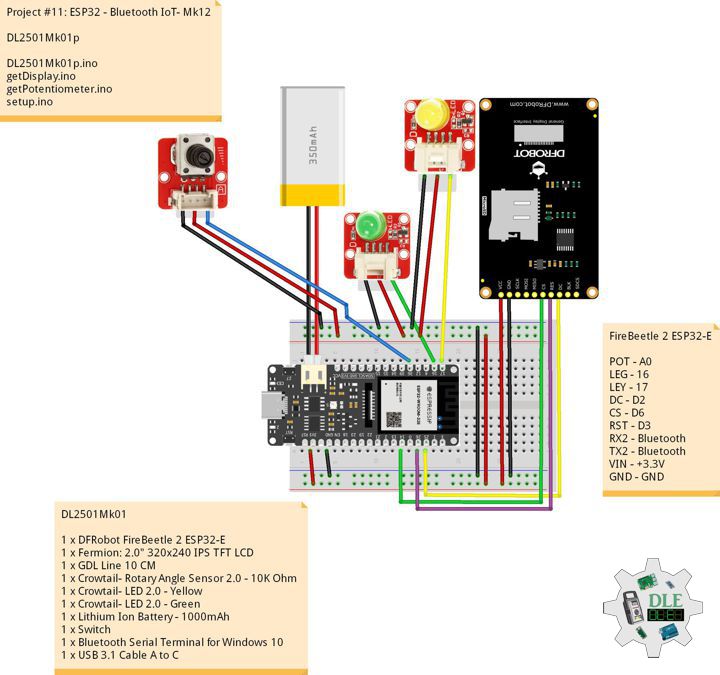
Project #11: ESP32 – Bluetooth IoT – Mk12
——
#DonLucElectronics #DonLuc #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Bluetooth
Bluetooth is a short-range wireless technology standard that is used for exchanging data between fixed and mobile devices over short distances and building personal area networks. In the most widely used mode, transmission power is limited to 2.5 milliwatts, giving it a very short range of up to 10 metres. It employs UHF radio waves in the ISM bands, from 2.402 GHz to 2.48 GHz.
You can pair all kinds of Bluetooth devices with your PC, including keyboards, mice, phones, speakers, IoT, and a whole lot more. To do this, your PC needs to have Bluetooth. Some PCs, such as laptops and tablets, have Bluetooth built in. If your PC doesn’t, you can plug a USB Bluetooth adapter into the USB port on your PC to get it.
DL2501Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail- Rotary Angle Sensor 2.0 – 10K Ohm
1 x Crowtail- LED 2.0 – Yellow
1 x Crowtail- LED 2.0 – Green
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal for Windows 10
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
POT – A0
LEG – 16
LEY – 17
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2501Mk01p
DL2501Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #11: ESP32 - Bluetooth IoT - Mk12
11-12
DL2501Mk01p.ino
DL2501Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail- Rotary Angle Sensor 2.0 - 10K Ohm
1 x Crowtail- LED 2.0 - Yellow
1 x Crowtail- LED 2.0 - Green
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal for Windows 10
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Potentiometer
int iPot = A0;
int iPotVal = 0;
// Change Your Threshold Here
int Threshold = 2000;
// Full String
String FullString = "";
// LED Yellow
int iLEDY = 17;
// LED Green
int iLEDG = 16;
// Software Version Information
String sver = "11-12";
void loop() {
// Potentiometer
isPotentiometer();
// Delay 2 Second
delay( 2000 );
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("DFRobot Display");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
}
// isDisplay Green
void isDisplayG(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// LED Yellow
screen.setCursor(0, 60);
screen.println("LED Green");
// Potentiometer Value
screen.setCursor(0, 90);
screen.println( iPotVal );
}
// isDisplay Yellow
void isDisplayY(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// LED Yellow
screen.setCursor(0, 60);
screen.println("LED Yellow");
// Potentiometer Value
screen.setCursor(0, 90);
screen.println( iPotVal );
}
getPotentiometer.ino
// Potentiometer
// Potentiometer
void isPotentiometer(){
// Connect Potentiometer to Analog 0
iPotVal = analogRead( iPot );
// Threshold
if (iPotVal > Threshold) {
// LED Yellow
digitalWrite(iLEDY, LOW);
// isDisplay Green
isDisplayG();
// LED Green
digitalWrite(iLEDG, HIGH);
// FullString
FullString = "LED Green = " + String(iPotVal) + "\r\n";
}
else {
// LED Green
digitalWrite(iLEDG, LOW);
// isDisplay Yellow
isDisplayY();
// LED Yellow
digitalWrite(iLEDY, HIGH);
// FullString
FullString = "LED Yellow = " + String(iPotVal) + "\r\n";
}
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Initialize the LED Yellow
pinMode(iLEDY, OUTPUT);
// Initialize the LED Green
pinMode(iLEDG, OUTPUT);
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
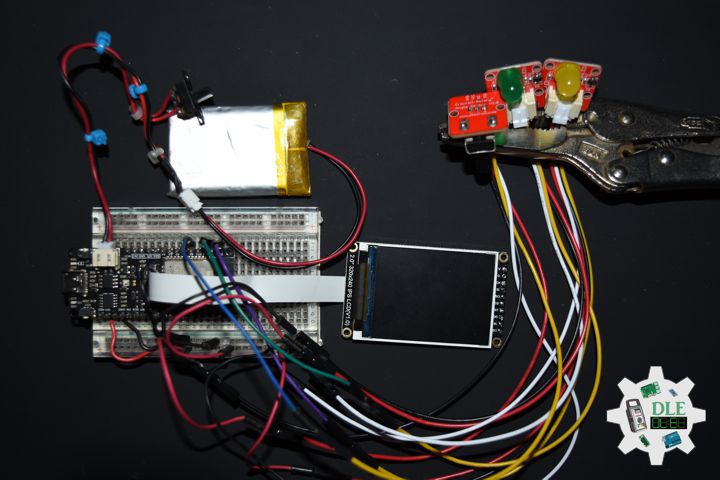
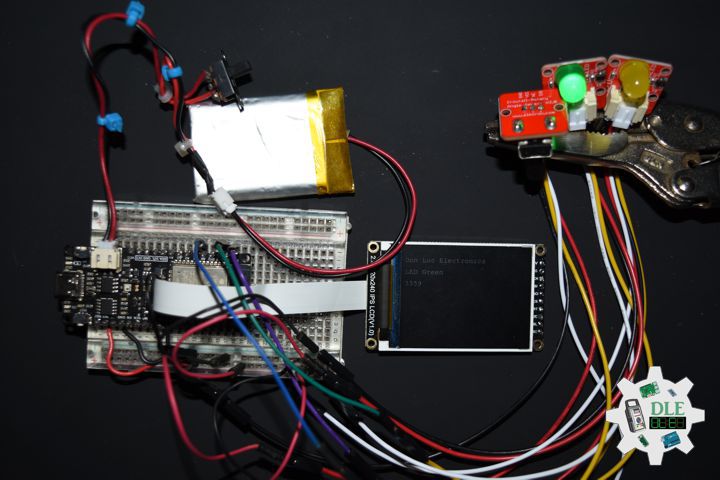
Christmas and Elecrow
——
#DonLucElectronics #DonLuc #Arduino #Christmas #SantaClaus #Display #Elecrow #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Christmas – Santa Claus
Santa Claus is a legendary figure originating in Western Christian culture who is said to bring gifts during the late evening and overnight hours on Christmas Eve. Christmas elves are said to make the gifts in Santa’s workshop, while flying reindeer pull his sleigh through the air. The popular conception of Santa Claus originates from folklore traditions surrounding the 4th-century Christian bishop Saint Nicholas, the patron saint of children. Saint Nicholas became renowned for his reported generosity and secret gift-giving.
Tracking
A Servo that to track Santa Claus’ yearly journey.
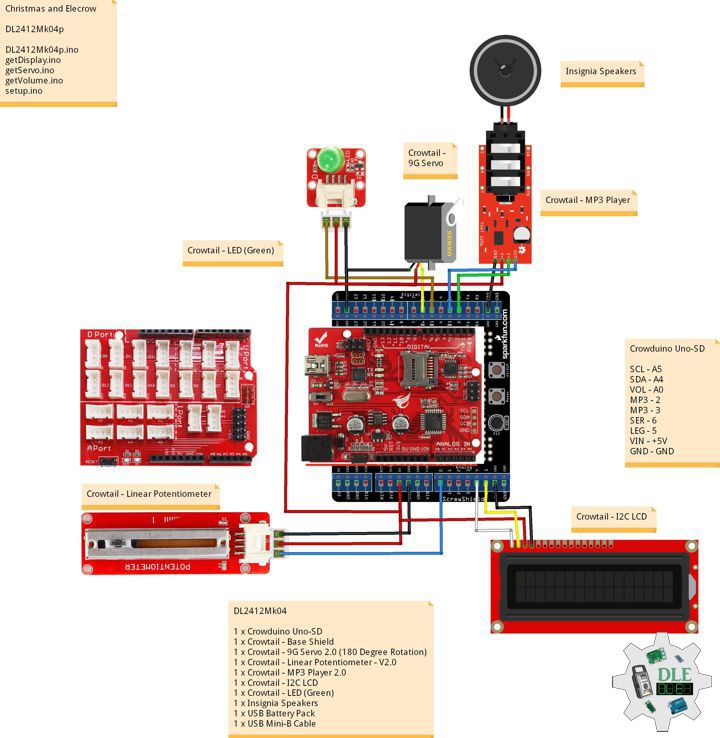
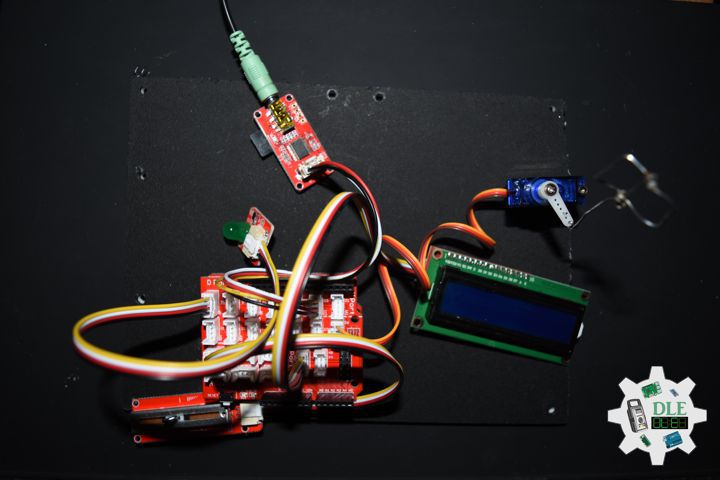
DL2412Mk04
1 x Crowduino Uno-SD
1 x Crowtail – Base Shield
1 x Crowtail – 9G Servo 2.0 (180 Degree Rotation)
1 x Crowtail – Linear Potentiometer – V2.0
1 x Crowtail – MP3 Player 2.0
1 x Crowtail – I2C LCD
1 x Crowtail – LED (Green)
1 x MicroSD 2 GB
1 x Insignia Speakers
1 x USB Battery Pack
1 x USB Mini-B Cable
Crowduino Uno-SD
SCL – A5
SDA – A4
VOL – A0
MP3 – 2
MP3 – 3
SER – 6
LEG – 5
VIN – +5V
GND – GND
DL2412Mk04p
DL2412Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Christmas and Elecrow
Christmas
DL2412Mk04p.ino
DL2412Mk04
1 x Crowduino Uno-SD
1 x Crowtail - Base Shield
1 x Crowtail - 9G Servo 2.0 (180 Degree Rotation)
1 x Crowtail - Linear Potentiometer - V2.0
1 x Crowtail - MP3 Player 2.0
1 x Crowtail - I2C LCD
1 x Crowtail - LED (Green)
1 x MicroSD 2 GB
1 x Insignia Speakers
1 x USB Battery Pack
1 x USB Mini-B Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// MP3 Player
#include <MP3Player_KT403A.h>
// Servo
#include<Servo.h>
// Wire
#include <Wire.h>
// Liquid Crystal
#include "LiquidCrystal.h"
// Liquid Crystal
// Connect via i2c
LiquidCrystal lcd(0);
// MP3 Player
SoftwareSerial mp3(2, 3);
// Linear Potentiometer
int LinearPot = A0;
int LinearPotValue = 0;
int z = 0;
// LED Green
int LedGreen = 5;
// LED Green On Off
int zzz = 1;
// Create servo object to control a servo
Servo myservo;
// iServo
int iServo = 6;
// Servo zz
int zz = 0;
// Software Version Information
String sver = "Christmas";
void loop() {
// Volume
isVolume();
// isServo
isServo();
}
getDisplay.ino
// getDisplay
// Crowtail- I2C LCD
// Display UID
void isDisplayUID(){
// Set up the LCD's number of rows and columns:
lcd.begin(16, 2);
// Print a message to the LCD.
// Cursor
lcd.setCursor(0, 0);
lcd.print("Don Luc Electron");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD.
lcd.print( sver );
}
// isDisplay Green On
void isDisplayGOn(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Christmas");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( "Led Green On" );
}
// isDisplay Green Off
void isDisplayGOff(){
// Print a message to the LCD
// Clear
lcd.clear();
// Cursor
lcd.setCursor(0, 0);
lcd.print("Christmas");
// Cursor
lcd.setCursor(0, 1);
// Print a message to the LCD
lcd.print( "Led Green Off" );
}
getServo.ino
// Servo
// isServo
void isServo(){
// Servo zz
zz -= 1;
if ( zz == 0 ) {
// Servo zz
zz = 100;
// LED Green On Off
if ( zzz == 1 ) { // Led Green On
// Led Green On
Serial.println("Led Green On");
digitalWrite(LedGreen, HIGH);
// Servo Write
myservo.write(-90);
// isDisplay Green On
isDisplayGOn();
zzz = 2;
} else if ( zzz == 2 ) { // Led Green Off
// Led Green Off
Serial.println("Led Green Off");
digitalWrite(LedGreen, LOW);
// Servo Write
myservo.write(90);
// isDisplay Green Off
isDisplayGOff();
zzz = 1;
}
}
}
getVolume.ino
// Volume
// is Volume
void isVolume(){
// Linear Potentiometer
// Allowable Volume values are 0 to 30
LinearPotValue = analogRead( LinearPot );
z = map(LinearPotValue, 0, 1023, 0, 30);
// Volume
SetVolume(z);
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// Initialize the LED Green
pinMode(LedGreen, OUTPUT);
// MP3 Player
// MP3 Player module is configured to talk at 9600 bauds
mp3.begin(9600);
// Small delay
delay(100);
// We configure the library to use the SD card
SelectPlayerDevice(0x02);
// Index of the song between 0 and 65535
// Play Loop
PlayLoop();
// Attaches the iServo
myservo.attach(iServo);
// Servo zz
zz = 101;
// Display UID
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
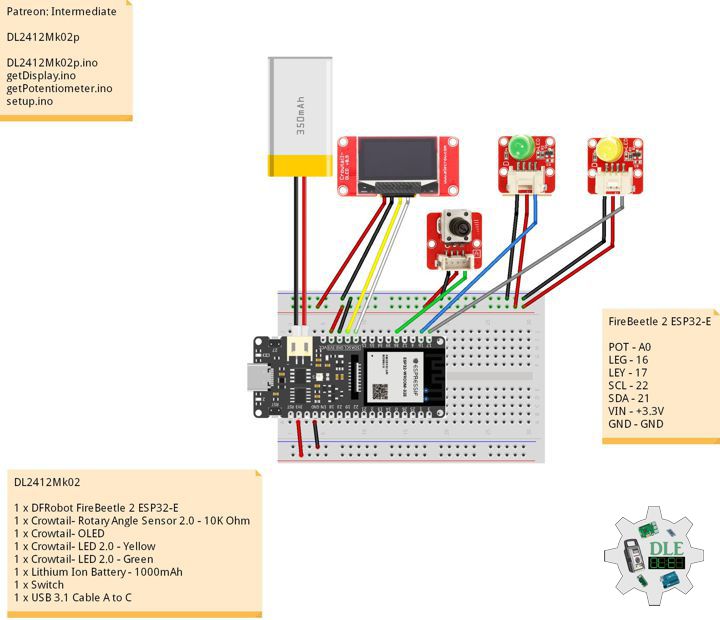
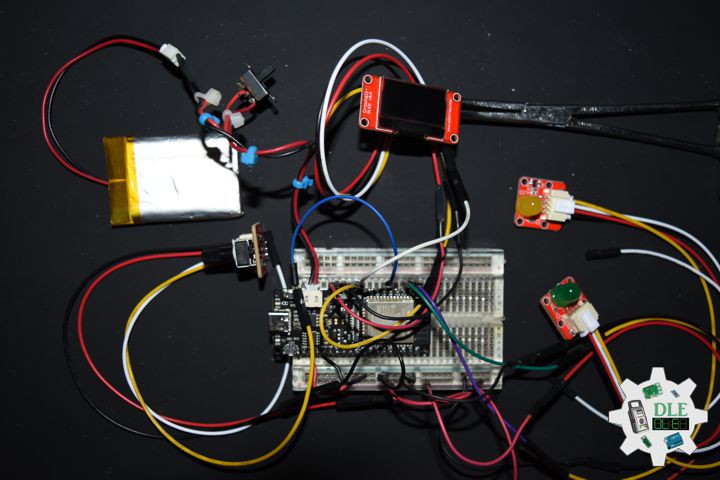
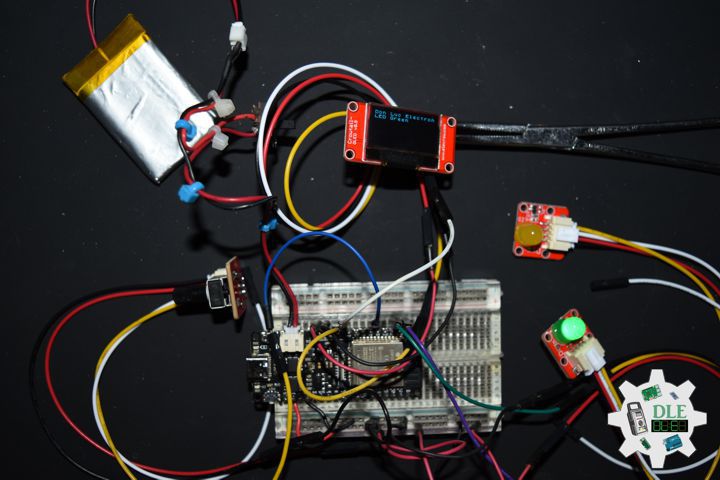
Patreon: Intermediate
——
#DonLucElectronics #DonLuc #ESP8266 #ESP32 #Arduino #Elecrow #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Patreon: Intermediate
Intermediate: Internet of Things (IoT). Internet of Things (IoT) describes devices with sensors, processing ability, software and other technologies that connect and exchange data with other devices and systems over the Internet or other communication networks.
Internet of Things (IoT)
Internet of Things (IoT), the vast array of physical objects equipped with sensors and software that enable them to interact with little human intervention by collecting and exchanging data via a network. The Internet of Things (IoT) includes the many “Smart”, computer-like devices so commonplace today, which can connect with the Internet or interact via wireless networks; these “Things” include phones, appliances, thermostats, lighting systems, irrigation systems, security cameras, vehicles, even animals and cities. Today, smart watches track exercise and steps, smart speakers add items to shopping lists and switch lights on and off, and transponders allow cars to pass through tollbooths and pay the fee electronically.
Espressif Systems
Espressif Systems, a company with headquarters in Shanghai, China made its debut in the microcontroller scene with their range of inexpensive and feature-packed WiFi microcontrollers.
ESP8266
The ESP8266 is a low-cost Wi-Fi microcontroller, with built-in TCP/IP networking software, and microcontroller capability.
Programming
Arduino — A C++-based firmware. With this core, the ESP8266 CPU and its Wi-Fi components can be programmed like any other Arduino device.
ESP32
ESP32 is a series of low-cost, low-power system-on-chip microcontrollers with integrated Wi-Fi and dual-mode Bluetooth. The ESP32 series employs either a Tensilica Xtensa LX6 microprocessor in both dual-core and single-core variations, an Xtensa LX7 dual-core microprocessor, or a single-core RISC-V microprocessor.
Programming
Arduino – A C++-based firmware. With this core, Arduino core for the ESP32, ESP32-S2, ESP32-S3, ESP32-C3, Etc.
DL2412Mk02
1 x DFRobot FireBeetle 2 ESP32-E
1 x Crowtail- Rotary Angle Sensor 2.0 – 10K Ohm
1 x Crowtail- OLED
1 x Crowtail- LED 2.0 – Yellow
1 x Crowtail- LED 2.0 – Green
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
POT – A0
LEG – 16
LEY – 17
SCL – 22
SDA – 21
VIN – +3.3V
GND – GND
——
DL2412Mk02p
DL2412Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Patreon: Intermediate
Intermediate
DL2412Mk02p.ino
DL2412Mk02
1 x DFRobot FireBeetle 2 ESP32-E
1 x Crowtail- Rotary Angle Sensor 2.0 - 10K Ohm
1 x Crowtail- OLED
1 x Crowtail- LED 2.0 - Yellow
1 x Crowtail- LED 2.0 - Green
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Crowtail- OLED
#include <U8x8lib.h>
// SPI
#include <SPI.h>
// Crowtail- OLED
// U8x8 Contructor List
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
// Potentiometer
int iPot = A0;
int iPotVal = 0;
// Change Your Threshold Here
int Threshold = 2000;
// LED Yellow
int iLEDY = 17;
// LED Green
int iLEDG = 16;
// Software Version Information
String sver = "Intermediate";
void loop() {
// Potentiometer
isPotentiometer();
// Delay 0.5 Second
delay( 500 );
}
getDisplay.ino
// getDisplay
// Crowbits-OLED 128X64 UID
void isDisplayUID(){
// Clear
u8x8.clear();
// Font
u8x8.setFont(u8x8_font_chroma48medium8_r);
// Draw
u8x8.drawString(0,0,"Don Luc Electron");
// Draw
u8x8.drawString(0,35,"Intermediate");
}
// isDisplay Green
void isDisplayG(){
// Clear
u8x8.clear();
// Font
u8x8.setFont(u8x8_font_chroma48medium8_r);
// Cursor
u8x8.setCursor(0,0);
// Print
u8x8.print("Don Luc Electron");
// Cursor
u8x8.setCursor(0,30);
// Print
u8x8.print("LED Green");
// Cursor
u8x8.setCursor(0,35);
// Print
u8x8.print(iPotVal);
}
// isDisplay Yellow
void isDisplayY(){
// Clear
u8x8.clear();
// Font
u8x8.setFont(u8x8_font_chroma48medium8_r);
// Cursor
u8x8.setCursor(0,0);
// Print
u8x8.print("Don Luc Electron");
// Cursor
u8x8.setCursor(0,30);
// Print
u8x8.print("LED Yellow");
// Cursor
u8x8.setCursor(0,35);
// Print
u8x8.print(iPotVal);
}
getPotentiometer.ino
// Potentiometer
// Potentiometer
void isPotentiometer(){
// Connect Potentiometer to Analog 0
iPotVal = analogRead( iPot );
// Threshold
if (iPotVal > Threshold) {
// LED Yellow
digitalWrite(iLEDY, LOW);
// isDisplay Green
isDisplayG();
// LED Green
digitalWrite(iLEDG, HIGH);
}
else {
// LED Green
digitalWrite(iLEDG, LOW);
// isDisplay Yellow
isDisplayY();
// LED Yellow
digitalWrite(iLEDY, HIGH);
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// Crowtail- OLED
u8x8.begin();
u8x8.setPowerSave(0);
// Delay
delay(100);
// Initialize the LED Yellow
pinMode(iLEDY, OUTPUT);
// Initialize the LED Green
pinMode(iLEDG, OUTPUT);
// Crowbits-OLED 128X64
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
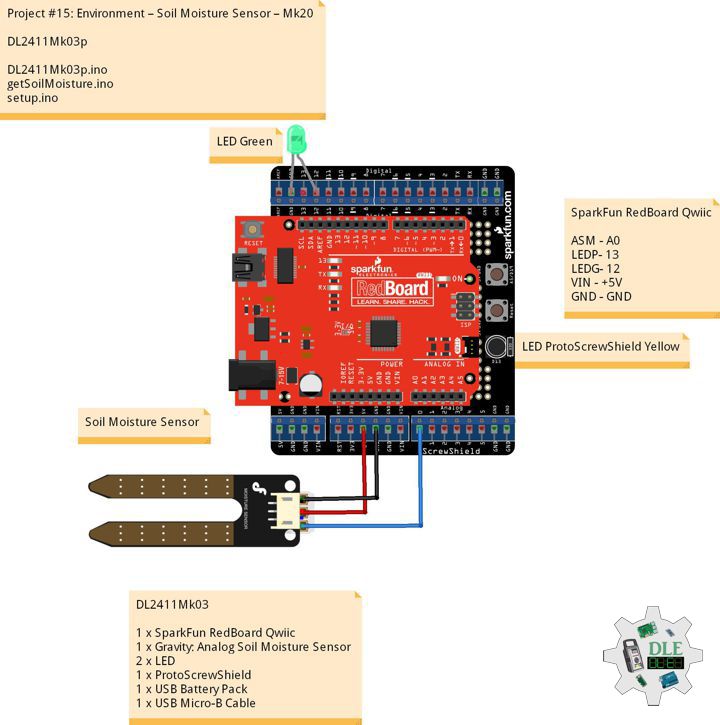
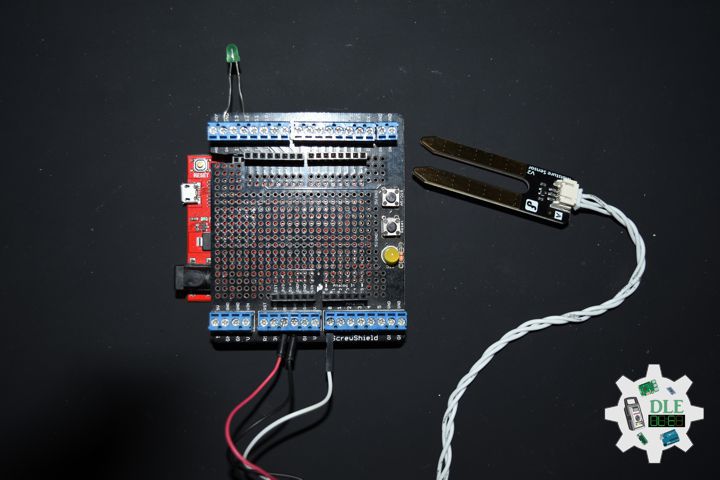
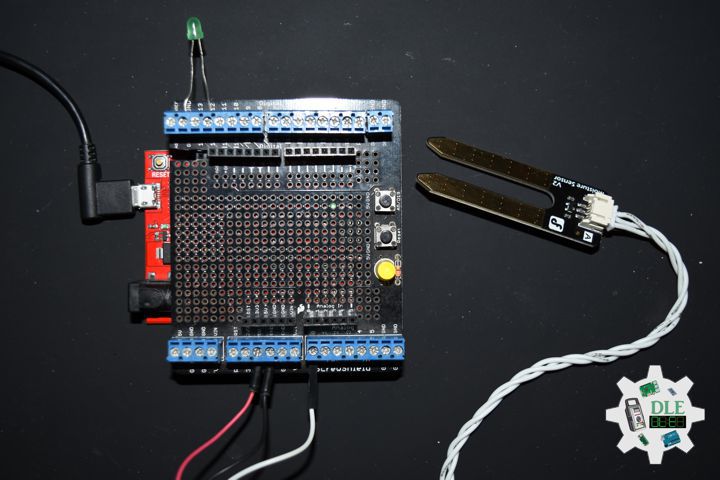
Project #15: Environment – Soil Moisture Sensor – Mk20
——
#DonLucElectronics #DonLuc #Arduino #ASM #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
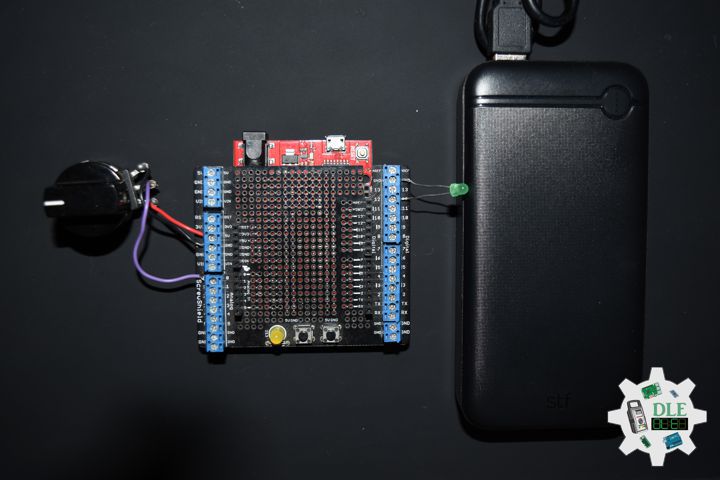
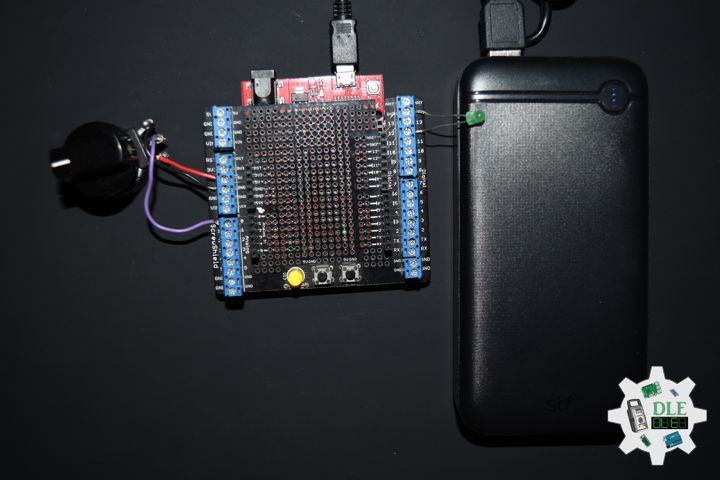
Soil Moisture Sensor
Soil moisture is the critical parameter in agriculture. If there is a shortage or overabundance of water, plants may die. At the same time, this data depends on many external factors, primarily weather conditions and climate changes. That is why it is so vital to understand the most effective methods for analyzing soil moisture content.
This term refers to the entire quantity of water in the ground’s pores or on its surface. The moisture content of soil depends on such factors as weather, type of land, and plants. The parameter is vital in monitoring soil moisture activities, predicting natural disasters, managing water supply, etc. This data may signal a future flood or water deficit ahead of other indicators.
DL2411Mk03
1 x SparkFun RedBoard Qwiic
1 x Gravity: Analog Soil Moisture Sensor
2 x LED
1 x ProtoScrewShield
1 x USB Battery Pack
1 x USB Micro-B Cable
SparkFun RedBoard Qwiic
ASM – A0
LEDP- 13
LEDG- 12
VIN – +5V
GND – GND
DL2411Mk03p
DL2411Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #15: Environment – Soil Moisture Sensor – Mk20
15-20
DL2411Mk03p.ino
DL2411Mk03
1 x SparkFun RedBoard Qwiic
1 x Gravity: Analog Soil Moisture Sensor
2 x LED
1 x ProtoScrewShield
1 x USB Battery Pack
1 x USB Micro-B Cable
*/
// Include the Library Code
// Gravity: Analog Soil Moisture Sensor
int iSoilMoisture = A0;
int iSoilMoistureVal = 0;
int zz = 0;
// Change Your Threshold Here
int Threshold = 300;
// LED ProtoScrewShield Yellow
int iLEDProto = 13;
// LED Green
int iLEDGreen = 12;
// Software Version Information
String sver = "15-20";
void loop() {
// Gravity: Analog Soil Moisture Sensor
isSoilMoisture();
// Delay 1 Second
delay( 1000 );
}
getSoilMoisture.ino
// Gravity: Analog Soil Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// Connect Soil Moisture Sensor to Analog 0
zz = analogRead( iSoilMoisture );
// iSoilMoistureVal => 0~900 Soil Moisture
iSoilMoistureVal = map( zz, 0, 715, 0, 900);
// Serial
Serial.print("Moisture Sensor Value: ");
// Threshold
if (iSoilMoistureVal > Threshold) {
// 300~900 - Humid Soil
// LEDProto
digitalWrite(iLEDProto, LOW);
// Serial
Serial.print( "Humid Soil " );
Serial.println( iSoilMoistureVal );
// LEDGreen
digitalWrite(iLEDGreen, HIGH);
}
else {
// 0-300 Dry Soil
// LEDGreen
digitalWrite(iLEDGreen, LOW);
// Serial
Serial.print( "Dry Soil " );
Serial.println( iSoilMoistureVal );
// LEDProto
digitalWrite(iLEDProto, HIGH);
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// Serial
Serial.begin(57600);
// Initialize the LED iLEDProto
pinMode(iLEDProto, OUTPUT);
// Initialize the LED iLEDGreen
pinMode(iLEDGreen, OUTPUT);
// Delay 1 Second
delay( 1000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
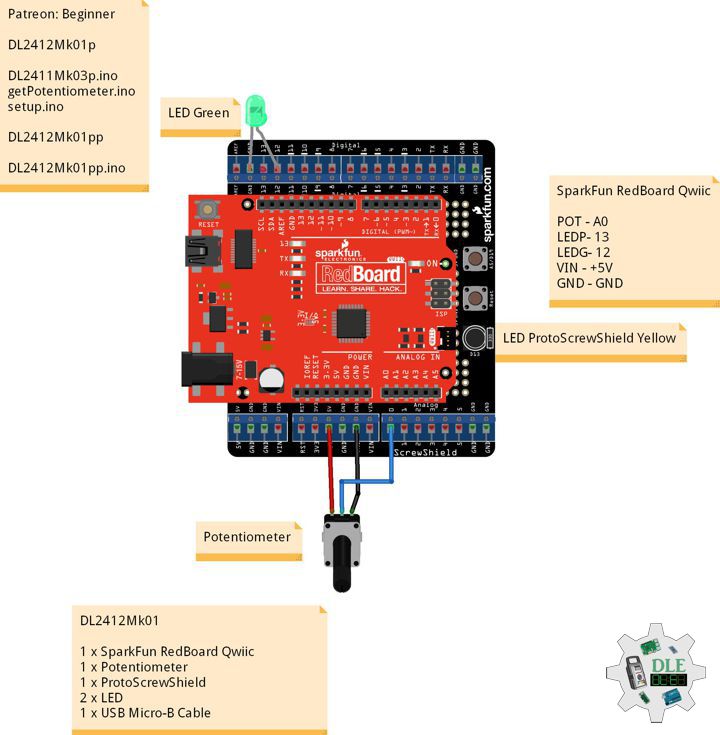
Patreon: Beginner
——
#DonLucElectronics #DonLuc #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Patreon: Beginner
Beginner: These beginner-friendly microcontrollers is Arduino Uno are easy to use and program with just a computer or laptop, a USB cable, and some open-source software.
What is Arduino?
Arduino board designs use a variety of microprocessors and controllers. The boards are equipped with sets of digital and analog input/output (I/O) pins that may be interfaced to various expansion boards “Shields” or breadboards and other circuits. The boards feature serial communications interfaces, including Universal Serial Bus (USB) on some models, which are also used for loading programs. Arduino boards are able to read inputs, light on a sensor, a finger on a button, or a Twitter message, and turn it into an output, activating a motor, turning on an LED, publishing something online. You can tell your board what to do by sending a set of instructions to the microcontroller on the board. The microcontrollers can be programmed using the C and C++ programming languages, using a standard API which is also known as the Arduino Programming Language, and the Arduino Software (IDE).
Arduino Software (IDE)
A minimal Arduino C/C++ program consists of only two functions:
setup(): This function is called once when a sketch starts after power-up or reset. It is used to initialize variables, input and output pin modes, and other libraries needed in the sketch.
loop(): After setup() function exits, the loop() function is executed repeatedly in the main program. It controls the board until the board is powered off or is reset. It is analogous to the function while.
DL2412Mk01
1 x SparkFun RedBoard Qwiic
1 x Potentiometer 10K Ohm
1 x ProtoScrewShield
2 x LED
1 x USB Micro-B Cable
SparkFun RedBoard Qwiic
POT – A0
LEDP – 13
LEDG – 12
VIN – +5V
GND – GND
——
DL2412Mk01ppp
DL2412Mk01ppp.ino
/****** Don Luc Electronics © ******/
int iPot = A0;
int iPotVal = 0;
int Threshold = 500;
int iLEDProto = 13;
int iLEDGreen = 12;
String sver = "Beginner";
void setup()
{
delay(100);
Serial.begin(57600);
pinMode(iLEDProto, OUTPUT);
pinMode(iLEDGreen, OUTPUT);
delay( 100 );
}
void loop() {
iPotVal = analogRead( iPot );
Serial.print("Potentiometer: ");
if (iPotVal > Threshold) {
digitalWrite(iLEDProto, LOW);
Serial.print( "LED Green " );
Serial.println( iPotVal );
digitalWrite(iLEDGreen, HIGH);
}
else {
digitalWrite(iLEDGreen, LOW);
Serial.print( "LED Proto " );
Serial.println( iPotVal );
digitalWrite(iLEDProto, HIGH);
}
delay( 100 );
}
——
DL2412Mk01pp
DL2412Mk01pp.ino
/****** Don Luc Electronics © ******
Software Version Information
Patreon: Beginner
Beginner
DL2412Mk01pp.ino
DL2412Mk01
1 x SparkFun RedBoard Qwiic
1 x Potentiometer
1 x ProtoScrewShield
2 x LED
1 x USB Micro-B Cable
*/
// Include the Library Code
// Potentiometer
int iPot = A0;
int iPotVal = 0;
// Change Your Threshold Here
int Threshold = 500;
// LED ProtoScrewShield Yellow
int iLEDProto = 13;
// LED Green
int iLEDGreen = 12;
// Software Version Information
String sver = "Beginner";
// Setup
void setup()
{
// Delay
delay(100);
// Serial
Serial.begin(57600);
// Initialize the LED iLEDProto
pinMode(iLEDProto, OUTPUT);
// Initialize the LED iLEDGreen
pinMode(iLEDGreen, OUTPUT);
// Delay 0.1 Second
delay( 100 );
}
// Loop
void loop() {
// Potentiometer
// Connect Potentiometer to Analog 0
iPotVal = analogRead( iPot );
// Serial
Serial.print("Potentiometer: ");
// Threshold
if (iPotVal > Threshold) {
// LEDProto
digitalWrite(iLEDProto, LOW);
// Serial
Serial.print( "LED Green " );
Serial.println( iPotVal );
// LEDGreen
digitalWrite(iLEDGreen, HIGH);
}
else {
// LEDGreen
digitalWrite(iLEDGreen, LOW);
// Serial
Serial.print( "LED Proto " );
Serial.println( iPotVal );
// LEDProto
digitalWrite(iLEDProto, HIGH);
}
// Delay 0.1 Second
delay( 100 );
}
——
DL2412Mk01p
DL2412Mk01p.ino
loop()
getPotentiometer.ino
Attaining => get
Combining Form => is
setup.ino
setup()
DL2412Mk01p
DL2411Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Patreon: Beginner
Beginner
DL2412Mk01p.ino
DL2412Mk01
1 x SparkFun RedBoard Qwiic
1 x Potentiometer
1 x ProtoScrewShield
2 x LED
1 x USB Micro-B Cable
*/
// Include the Library Code
// Potentiometer
int iPot = A0;
int iPotVal = 0;
// Change Your Threshold Here
int Threshold = 500;
// LED ProtoScrewShield Yellow
int iLEDProto = 13;
// LED Green
int iLEDGreen = 12;
// Software Version Information
String sver = "Beginner";
void loop() {
// Potentiometer
isPotentiometer();
// Delay 0.1 Second
delay( 100 );
}
getPotentiometer.ino
// Potentiometer
// Potentiometer
void isPotentiometer(){
// Connect Potentiometer to Analog 0
iPotVal = analogRead( iPot );
// Serial
Serial.print("Potentiometer: ");
// Threshold
if (iPotVal > Threshold) {
// LEDProto
digitalWrite(iLEDProto, LOW);
// Serial
Serial.print( "LED Green " );
Serial.println( iPotVal );
// LEDGreen
digitalWrite(iLEDGreen, HIGH);
}
else {
// LEDGreen
digitalWrite(iLEDGreen, LOW);
// Serial
Serial.print( "LED Proto " );
Serial.println( iPotVal );
// LEDProto
digitalWrite(iLEDProto, HIGH);
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay(100);
// Serial
Serial.begin(57600);
// Initialize the LED iLEDProto
pinMode(iLEDProto, OUTPUT);
// Initialize the LED iLEDGreen
pinMode(iLEDGreen, OUTPUT);
// Delay 0.1 Second
delay( 100 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
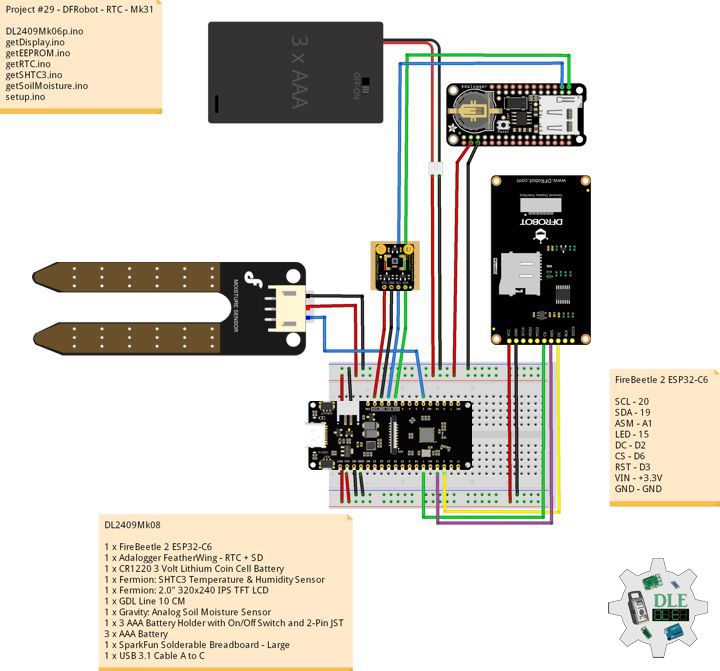
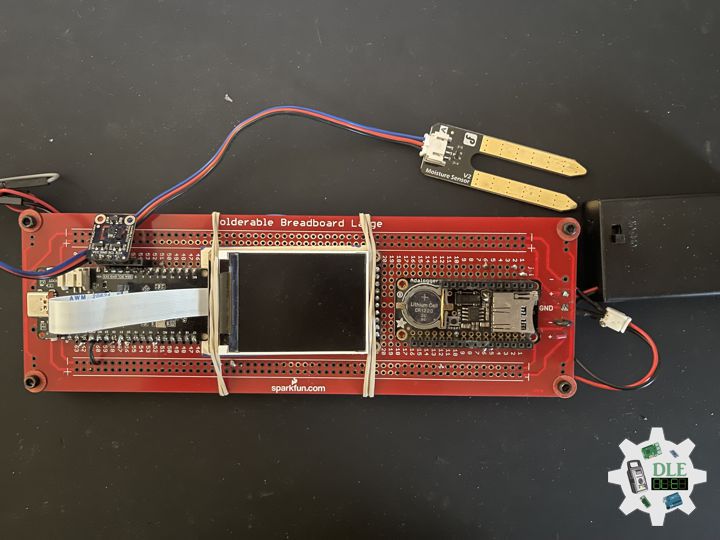
Project #29 – DFRobot – RTC – Mk31
——
#DonLucElectronics #DonLuc #DFRobot #RTC #SD #ASM #SHTC3 #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #SparkFun #Adafruit #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Real-Time Clock
A Real-Time Clock (RTC) is an electronic device, most often in the form of an integrated circuit, that measures the passage of time. Although the term often refers to the devices in personal computers, servers and embedded systems, RTCs are present in almost any electronic device which needs to keep accurate time of day.
Although keeping time can be done without an RTC, using one has benefits:
- Reliably maintains and provides current time through disruptive system states such as hangs, sleep, reboots, or if given sufficient backup power, full shutdown and hardware reassembly, without the need to have its time set again.
- Low power consumption, important when running from alternate power.
- Frees the main system for time-critical tasks.
- Sometimes more accurate than other methods.
DL2409Mk08
1 x FireBeetle 2 ESP32-C6
1 x Adalogger FeatherWing – RTC + SD
1 x CR1220 3 Volt Lithium Coin Cell Battery
1 x Fermion: SHTC3 Temperature & Humidity Sensor
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Gravity: Analog Soil Moisture Sensor
1 x 3 AAA Battery Holder with On/Off Switch and 2-Pin JST
3 x AAA Battery
1 x SparkFun Solderable Breadboard – Large
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
SCL – 20
SDA – 19
ASM – A1
LED – 15
DC – D2
CS – D6
RST – D3
VIN – +3.3V
GND – GND
DL2409Mk08p
DL2409Mk08p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - RTC - Mk31
29-31
DL2409Mk08p.ino
DL2409Mk08
1 x FireBeetle 2 ESP32-C6
1 x Adalogger FeatherWing - RTC + SD
1 x CR1220 3 Volt Lithium Coin Cell Battery
1 x Fermion: SHTC3 Temperature & Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Gravity: Analog Soil Moisture Sensor
1 x 3 AAA Battery Holder with On/Off Switch and 2-Pin JST
3 x AAA Battery
1 x SparkFun Solderable Breadboard - Large
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Fermion: SHTC3 Temperature & Humidity Sensor
#include"DFRobot_SHTC3.h"
// Date and Time Functions PCF8523 RTC
#include <RTClib.h>
// Date and Time PCF8523 RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// Fermion: SHTC3 Temperature & Humidity Sensor
DFRobot_SHTC3 SHTC3;
uint32_t id = 0;
float temperature;
float humidity;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Gravity: Analog Soil Moisture Sensor
int iSoilMoisture = A1;
int iSoilMoistureVal = 0;
int zz = 0;
// Change Your Threshold Here
int Threshold = 300;
String SM = "";
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-31";
void loop() {
// Date and Time PCF8523 RTC
isRTC();
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
// Gravity: Analog Soil Moisture Sensor
isSoilMoisture();
// DFRobot Display 240x320 - ASM - Temperature and Humidity - Date and Time
isDisplayTH();
// Delay 5 Second
delay( 5000 );
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// DFRobot Display 240x320 - ASM - Temperature and Humidity
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Soil Moisture Sensor
screen.setCursor(0, 30);
screen.println("Soil Moisture Sensor");
// Date and Time
screen.setCursor(0, 60);
screen.println( dateRTC + " - " + timeRTC );
// Gravity: Analog Soil Moisture Sensor
screen.setCursor(0, 90);
screen.println( "ASM: " );
screen.setCursor(60, 90);
screen.println( iSoilMoistureVal );
screen.setCursor(0, 120);
screen.println( SM );
// SHTC3 Temperature
screen.setCursor(0, 150);
screen.println( "Tem: " );
screen.setCursor(60, 150);
screen.println( temperature );
screen.setCursor(120, 150);
screen.println( "C" );
// SHTC3 Humidity
screen.setCursor(0, 180);
screen.println( "Hum: " );
screen.setCursor(60, 180);
screen.println( humidity );
screen.setCursor(120, 180);
screen.println( "%RH" );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getRTC.ino
// Date and Time PCF8523 RTC
// Setup Date and Time PCF8523 RTC
void isSetupRTC() {
// Date and Time PCF8523 RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2024, 9, 26, 9, 1, 0));
}
// When the RTC was stopped and stays connected to the battery, it has
// to be restarted by clearing the STOP bit. Let's do this to ensure
// the RTC is running.
rtc.start();
// The PCF8523 can be calibrated for:
// - Aging adjustment
// - Temperature compensation
// - Accuracy tuning
// The offset mode to use, once every two hours or once every minute.
// The offset Offset value from -64 to +63.
// See the Application Note for calculation of offset values.
// https://www.nxp.com/docs/en/application-note/AN11247.pdf
// The deviation in parts per million can be calculated over
// a period of observation. Both the drift (which can be negative)
// and the observation period must be in seconds. For accuracy
// the variation should be observed over about 1 week.
// Note: any previous calibration should cancelled prior to
// any new observation period.
// Seconds plus or minus over oservation period - set to
// 0 to cancel previous calibration.
float drift = 43;
// total obsevation period in seconds (86400 = seconds in 1 day:
// 7 days = (7 * 86400) seconds )
float period_sec = (7 * 86400);
// Deviation in parts per million (μs)
float deviation_ppm = (drift / period_sec * 1000000);
// Use with offset mode PCF8523_TwoHours
float drift_unit = 4.34;
//For corrections every min the drift_unit is 4.069 ppm
// (use with offset mode PCF8523_OneMinute)
// float drift_unit = 4.069;
int offset = round(deviation_ppm / drift_unit);
}
// Date and Time PCF8523 RTC
void isRTC () {
// Date and Time
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
/**
* Mode For configuring sensor working mode
* SHTC3:
PRECISION_HIGH_CLKSTRETCH_ON Clock Stretching Enabled
* PRECISION_HIGH_CLKSTRETCH_OFF Clock Stretching Disabled
* PRECISION_LOW_CLKSTRETCH_ON Clock Stretching Enabled & Low Power
* PRECISION_LOW_CLKSTRETCH_OFF Clock Stretching Disabled & Low Power
*/
temperature = SHTC3.getTemperature(PRECISION_HIGH_CLKSTRETCH_ON);
/**
* Mode For configuring sensor working mode
* SHTC3
* PRECISION_HIGH_CLKSTRETCH_ON Clock Stretching Enabled
* PRECISION_HIGH_CLKSTRETCH_OFF Clock Stretching Disabled
* PRECISION_LOW_CLKSTRETCH_ON Clock Stretching Enabled & Low Power
* PRECISION_LOW_CLKSTRETCH_OFF Clock Stretching Disabled & Low Power
*/
humidity = SHTC3.getHumidity(PRECISION_HIGH_CLKSTRETCH_OFF);
}
getSoilMoisture.ino
// Gravity: Analog Soil Moisture Sensor
// Soil Moisture
void isSoilMoisture(){
// Connect Soil Moisture Sensor to Analog 0
zz = analogRead( iSoilMoisture );
// iSoilMoistureVal => 0~900 Soil Moisture
iSoilMoistureVal = map( zz, 0, 4095, 0, 900);
// Threshold
if (iSoilMoistureVal > Threshold)
// 300~950 - Humid Soil
SM = "Humid Soil";
else {
// 0-300 Dry Soil
SM = "Dry Soil";
}
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Fermion: SHTC3 Temperature & Humidity Sensor
SHTC3.begin();
/*SHTC3 is set to sleep mode by default. Please wake it up before use.
Use SHTC3.sleep() to let SHTC3 enter sleep mode; SHTC3
stops working in sleep mode*/
SHTC3.wakeup();
// Delay
delay(100);
// Setup Date and Time PCF8523 RTC
isSetupRTC();
// Date and Time PCF8523 RTC
isRTC();
// Delay
delay(100);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot Luc.Paquin: https://edu.dfrobot.com/dashboard/makelogs
Hackster.io: https://www.hackster.io/neosteam-labs
ELECROW: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: www.tiktok.com/@luc.paquin8
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc