Project #23: E-Textiles – E-Textiles and Wearable Technology – Mk01
——
#DonLucElectronics #DonLuc #ETextiles #Wearable #Arduino #Project #Programming #Electronics #Microcontrollers #Consultant
——
——
E-Textiles and Wearable Technology
Flexible electronic textiles and wearable electronic devices are becoming more and more interesting every day. With the increasing interest in wearable electronics, production processes are developing and their usage is becoming widespread. The technical expertise to integrate wires, monofilaments, and conductive yarns into narrow fabrics for use in numerous textiles applications that can replace or enhance, prior electric or electronic systems. Our ability to engineer products to our customers unique configurations will transform traditional fabrics into highly functional integrated systems and products. Your unique textile is now a device with the capability to see, hear, sense, communicate, store, monitor, and convert energy and/or data.
Aesthetic examples include fabrics that light up and fabrics that can change colour. Some of these fabrics gather energy from the environment by harnessing vibrations, sound, or heat, reacting to these inputs. The colour changing and lighting scheme can also work by embedding the fabric with electronics that can power it.
Performance enhancing smart textiles are intended for use in athletic, extreme sports, and military applications. These include fabrics designed to regulate body temperature, reduce wind resistance, and control muscle vibration, all of which may improve athletic performance. Other fabrics have been developed for protective clothing, to guard against extreme environmental hazards, such as radiation and the effects of space travel.
Electronic device with micro-controllers that are worn close to and, or on the surface of the skin, where they detect, analyze, and transmit information concerning, body signals such as vital signs, or ambient data and which allow in some cases immediate biofeedback to the wearer. Electronic textiles are distinct from and wearable computing because the emphasis is placed on the seamless integration of textiles with electronic elements like microcontrollers, GPS, WiFi, Bluetooth, sensors, and actuators. Furthermore, e-textiles need not be wearable.
E-Textiles and Wearable
- Clothing And Shoes
- Bags And Purses
- Backpacks
- Hats And Caps
- Helmets
- Biometrics
- Environment, Temperature, Humidity, Pressure, Altitude, Air Quality, TVOC, eCO2, And Gas Sensor
- Sound
- GPS
- Imaging
- Angle Displacement Measurement
- Bends and Flexes Physically With Motion Device
- Medical Devices
- Recuperate Their Movement With Their Hands, Arm, Leg And Foot
- Computer Peripherals
- Physical Therapy
- RFID
- Radiation
- Gaming
- Art
- Computer Peripherals
- Musical Instruments
- Robotics
- Jewelry
- Etc…
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #22: Synthesizer – The AcceleroSynth 2012 – Mk01
——
#DonLucElectronics #DonLuc #Synthesizer #Programming #Electronics #Microcontrollers #Consultant
——
——
Synthesizer, Music Synthesizer Or Electronic Sound Synthesizer
Synthesizer machine that electronically generates and modifies sounds, frequently with the use of a digital computer. Synthesizers are used for the composition of electronic music and in live performance. Synthesizers are typically played with keyboards or controlled by sequencers, software or other instruments. A electronic musical instrument that generates audio signals. Synthesizers typically create sounds by generating waveforms, through methods including subtractive synthesis, additive synthesis and frequency modulation synthesis. These sounds may be altered by components such as filters, which cut or boost frequencies, envelopes, which control articulation, or how notes begin and end, and low-frequency oscillators, which modulate parameters such as pitch, volume, or filter characteristics affecting timbre.
The AcceleroSynth – 2012
We are finally ready for our first electronics project, The AcceleroSynth. It is an microcontroller-based (Arduino) music synth that is controller by a 3 axis analog accelerometer. It will be both a hardware and a software synth. This is the announcement for the project and in the coming days I will post the BOM (Bill of Material), schematics and Arduino code with the first assembly video. The project will first be assembled on a protoboard, then a soldered version will be built either on a perfboard or on an Arduino ProtoShield. If there is enough demand either a PCB or an Arduino Shield will be built for the project and sold here. More on that later. The first installment on the building of the project should be up on a few days.
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Introduction to Microcontrollers – 2012
——
#DonLucElectronics #DonLuc #Programming #Electronics #Microcontrollers #Consultant
——

——
Computer
A computer is an electronic device that manipulates information, or data. It has the ability to store, retrieve, and process data. Most computers rely on a binary system, which uses two variables, 0 and 1, to complete tasks such as storing data, calculating algorithms, and displaying information. Computers come in many different shapes and sizes, from handheld smartphones to supercomputers weighing more than 300 tons.
Microcontrollers
A microcontroller is a compact integrated circuit designed to govern a specific operation in an embedded system. A typical microcontroller includes a processor, memory and input / output peripherals on a single chip.
Sometimes referred to as an embedded controller or microcontroller unit (MCU), microcontrollers are found in vehicles, robots, office machines, medical devices, mobile radio transceivers, vending machines and home appliances, among other devices. They are essentially simple miniature personal computers designed to control small features of a larger component, without a complex front-end operating system. Microcontrollers are designed for embedded applications, in contrast to the microprocessors used in personal computers or other general purpose applications consisting of various discrete chips.
Introduction to Microcontrollers – 2012
I’m hard at work… Actually make that “I think” that tomorrow’s video post will be an introduction to microcontrollers. I will dig some stuff out of the drawers tomorrow and as usual make it up as I go and it will probably be about microcontrollers.
Today’s video post is a short introduction to microcontrollers. Watch in the coming days for our next post which will be about our first microcontroller project. It probably will be Arduino-based.
Video and speech error.
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Welcome to The Alpha Geek Blog – 2012
——
#DonLucElectronics #DonLuc #Programming #Electronics #Microcontrollers #Consultant
——
——
Back to the electronics world where somebody used to apprentice for years before moving up in the electronics hierarchy, we now have kids that goes for a few weeks to a few months in a famous microcontrollers, and move on to another one to improve their resumé, and that they want to be electronics stars a few short years after they get interested in the trade. This lead to what I saw yesterday on YouTube when a 25 year old ‘Old Timer’ has is own electronics show on YouTube, plainly shows that he cannot handle the job at hand, and even worse does not even demonstrate good manual skill at the basic components work for the programming he demonstrates. The later is a trait that you see often nowadays on electronics show, and I assume that they do not teach basic techniques, or worse that they do, but most people do not bother learning and practicing them properly.
I guess that I am ranting again and boring you all, and that what was supposed to be a very short post is turning into a long one, but I firmly believe that experience and basic skills takes time to learn, and that there are no shortcuts to attain them both. I noticed the same trend in my professional life as a programmer, is that there are so many new things to learn that people are more interested in the technology itself, than in making thing actually do something very well, without the need of the latest technology.
A word of advise to anybody passing by here from an ‘Old Timer’ at many things including life, no matter what your goals are in life, no matter what subject you really feel deeply interested in, please take some time developing the basic skills to achieve your goals. It both takes time and a lot of practice, but when you finally grow up and are finally getting a bit of real life experience under your collar, you will learn to appreciate the fact that you actually know a lot more about the subject at hand than a lot of your contemporaries, and one day you will also learn to be proud of that in itself. By the way, this also applies to people my age, as we are never too old to learn anything new, and experience, no matter how old you are to start with, takes a long time to accumulate. As they would say today, knowledge and experience rules!
Welcome to The Alpha Geek Blog – 2012
After many setback in the past few weeks it is finally the time to launch this video blog. I want to welcome you all and I hope that this technology video blog will be both interesting and helpful.
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Pololu Wheel – Mk23
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
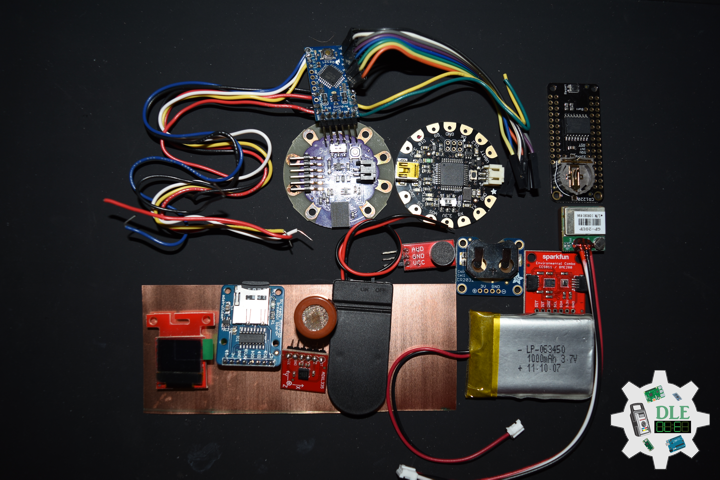
Pololu Wheel 90 mm × 10 mm – Black
These black plastic wheels have silicone tires and measure 90 mm (3.54 inches) in diameter, and they press-fit onto the 3mm D shafts on many of our motors, including our micro metal gearmotors and our mini plastic gearmotors. Additionally, this wheel is compatible with several of our universal mounting hubs, which can serve as adapters for motors with different shafts. Six mounting holes for #4 or M3 screws make it possible to use the wheel with any of our universal mounting hubs for those screw sizes, enabling these wheels to be used with our larger metal gearmotors and stepper motors. The included silicone tires, which feature horizontal treads for improved traction.
DL2202Mk03
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm – Black
4 x Screw – #4-40 – 3/8 inch
1 x SparkFun Cerberus USB Cable
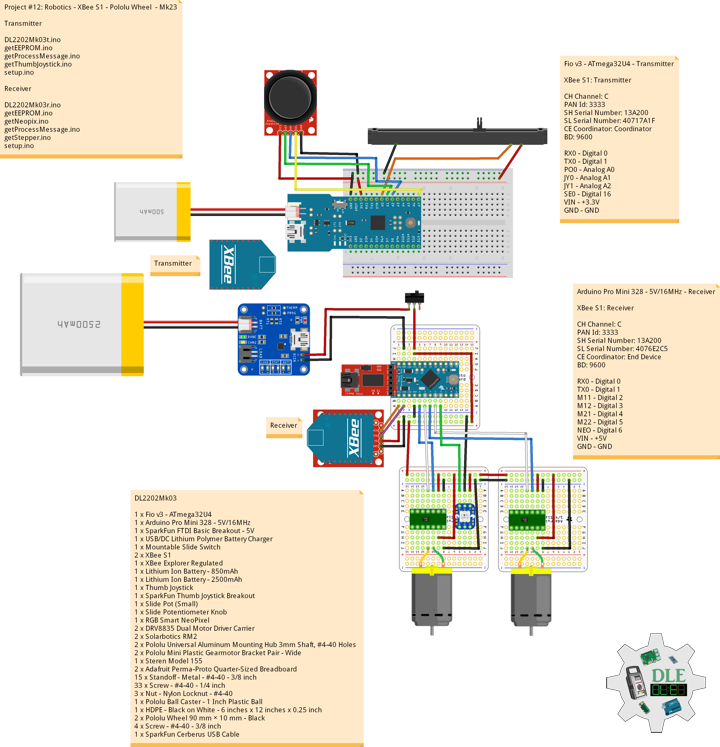
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk03t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Transmitter
DL2202Mk03t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-23t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk03r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Receiver
DL2202Mk03r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm - Black
4 x Screw - #4-40 - 3/8 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-23r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 80, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Backward
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Forward
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
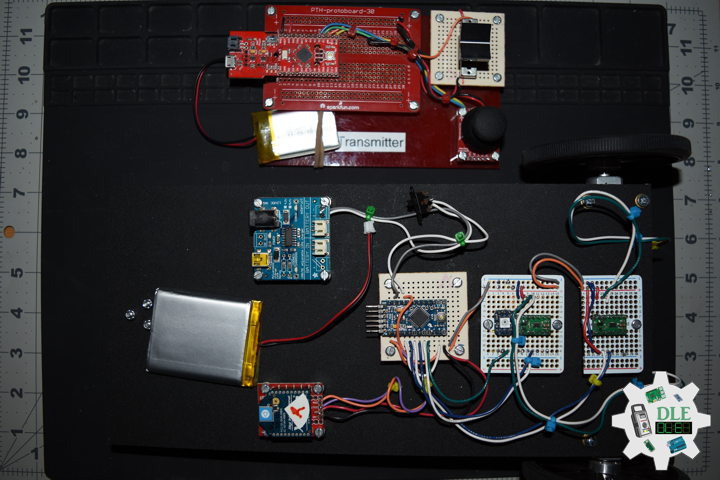
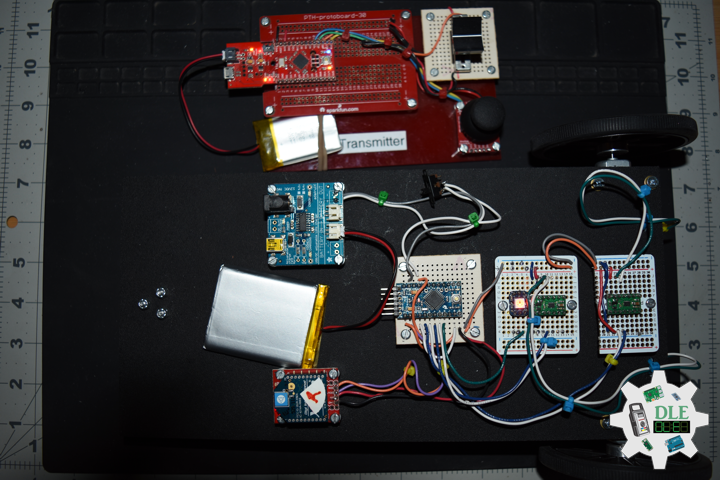
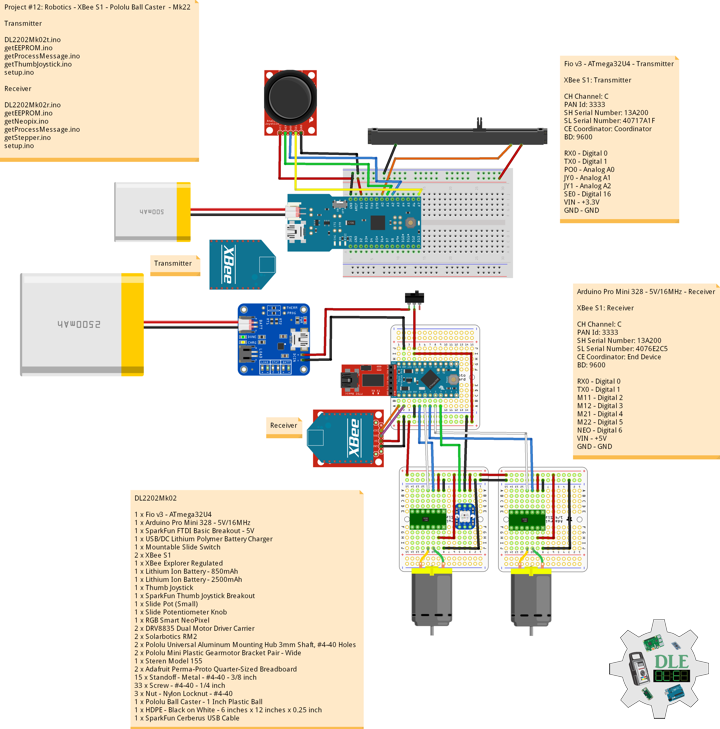
Project #12: Robotics – Pololu Ball Caster – Mk22
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Pololu Ball Caster with 1 Inch Plastic Ball and Ball Bearings
This ball caster uses a 1 inch diameter plastic ball and has an overall height of 1.1 inches (29 mm). The two-part housing snaps together to securely enclose the ball and three ball bearings that minimize friction between the ball and the ABS housing.
This ball caster kit includes a two-part black ABS housing, a 1 inch diameter POM plastic ball, three 3 mm × 7 mm × 3 mm ball bearings, and three dowel pins used to hold the ball bearings. When assembled, the ball caster is capable of rolling in any direction with low friction, making it suitable for use as a third contact point for wheeled, differential-drive robots weighing up to around ten pounds.
The base piece of the housing has holes for three mounting screws and slots for ball bearings. The second part of the housing snaps into the base piece to secure the ball and ball bearings. The assembled ball caster has an overall height of 1.1 inches (29 mm).
DL2202Mk02
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2202Mk02t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Ball Caster - Mk22
02-02
Transmitter
DL2202Mk02t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-22t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk02r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Ball Caster - Mk22
02-02
Receiver
DL2202Mk02r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-22r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
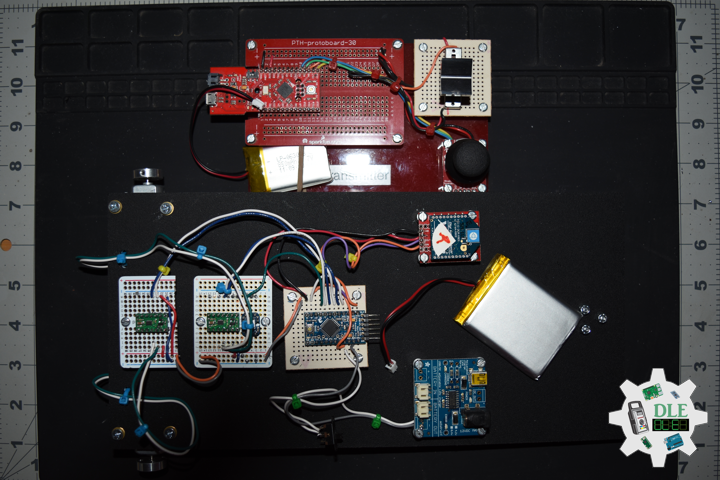
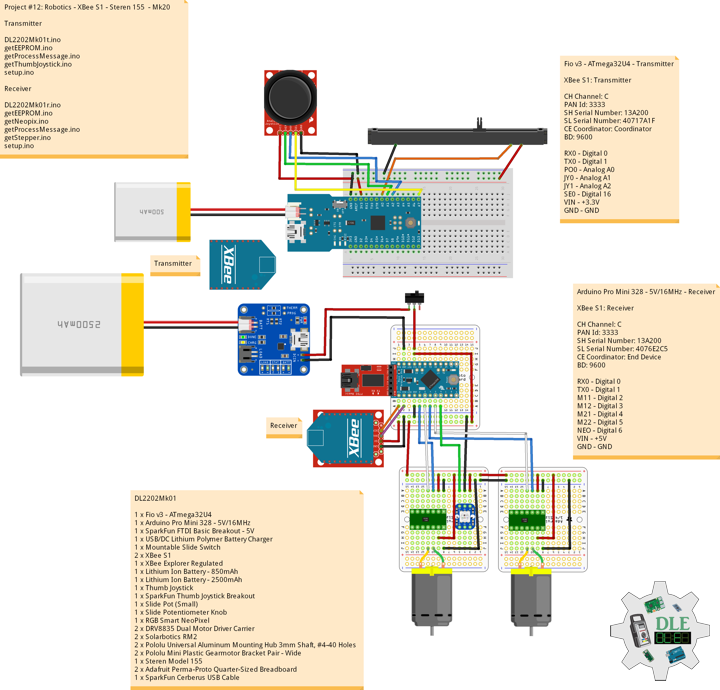
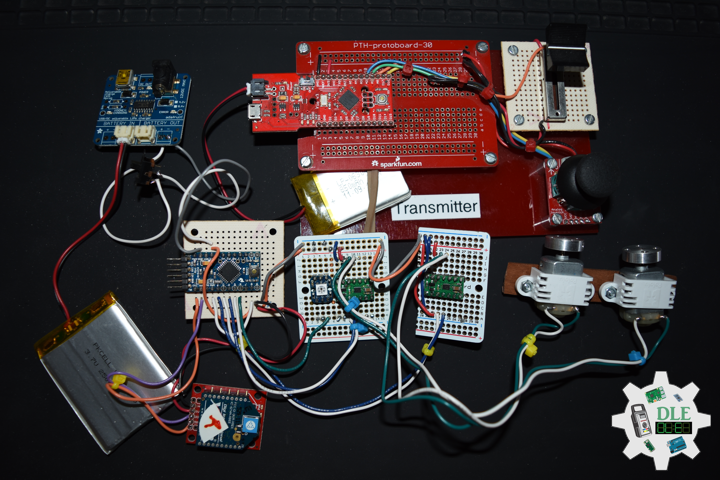
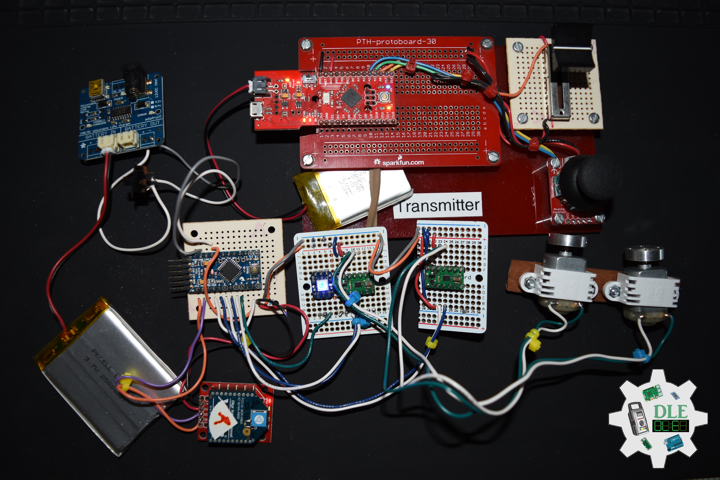
Project #12: Robotics – Steren 155 – Mk21
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Perforated Phenolic Plate
So you finish your electronics projects, such as printed circuits. We know that designing a prototype or electronic project can be a complicated task if you do not have the necessary items to carry it out, so with us you it a phenolic plates of a face, two sided or perforated, ferric chloride, auto-adherable tracks, leaves thermal transfer or permanent ink markers so that your circuits are perfect.
Steren Model 155
Bakelite phenolic plate with copper, 4.5 cm x 4.5 cm, engraved and perforated with 164 orifices for components and 4 for fixing the plate. Ideal for projects or prototypes.
DL2202Mk01
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk01t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Steren 155 - Mk21
02-01
Transmitter
DL2202Mk01t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-21t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk01r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Steren 155 - Mk21
02-01
Receiver
DL2202Mk01r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-21r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
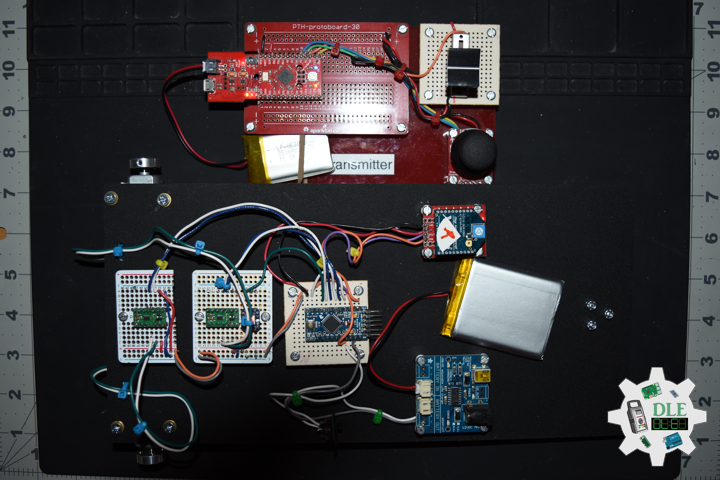
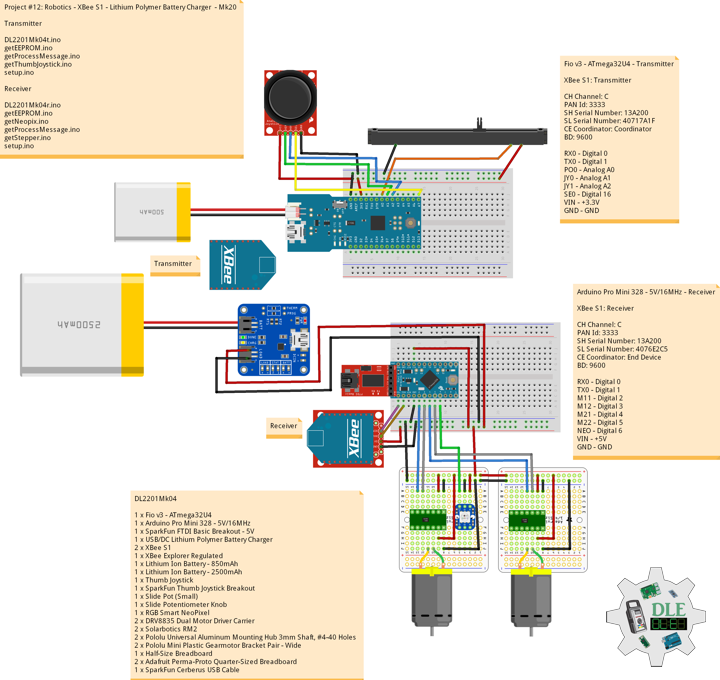
Project #12: Robotics – Lithium Polymer Battery Charger – Mk20
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
USB/DC Lithium Polymer Battery Charger 5-12V – 3.7/4.2v Cells
Charge your single-cell lithium ion/polymer battery any which way you like with this board. Other nice things about this charger include multiple LEDs for power & charging status, including a charging LED which will blink when the battery is full. If the charger gets too hot from high-speed charging, it will slow down the charge rate automatically. You can easily adjust the charge rate up to 1.2A or down to 100mA. For use with Adafruit Lipoly/LiIon batteries only. Other batteries may have different voltage, chemistry, polarity or pinout.
- Use USB or DC power – 5 to 12V input
- Charges one single-cell 3.7/4.2v batteries with constant current/constant voltage
- Three indicator LEDs – green for Power, orange for charging and red for error
- Charging LED will blink when the battery is full
- 2 JST connections so you can keep the battery plugged in and powering your project
- Terminal block connections galore just solder in 3.5mm terminal blocks
- Default charge rate is about 500mA, but you can easily change this by soldering in a through-hole resistor on. The chip can do 100-1200 mA charging
- Safety timer will stop charging after about 14 hours
- The chip supports a standard 10K thermistor, which we have stuffed as a standard resistor. You can solder in a thermistor easily
DL2201Mk04
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2201Mk04t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Lithium Polymer Battery Charger - Mk20
01-04
Transmitter
DL2201Mk04t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-20t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
——
DL2201Mk04r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Lithium Polymer Battery Charger - Mk20
01-04
Receiver
DL2201Mk04r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-20r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – LiPower Boost Converter – Mk19
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
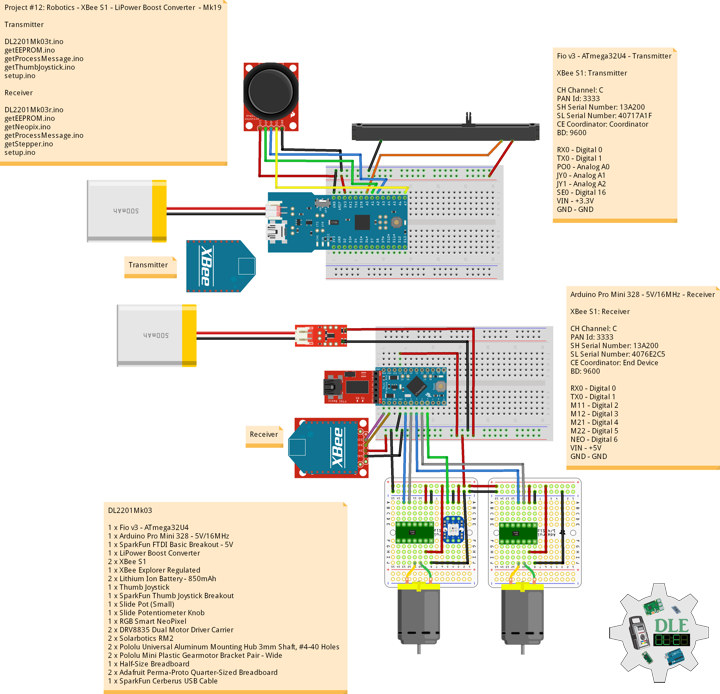
——
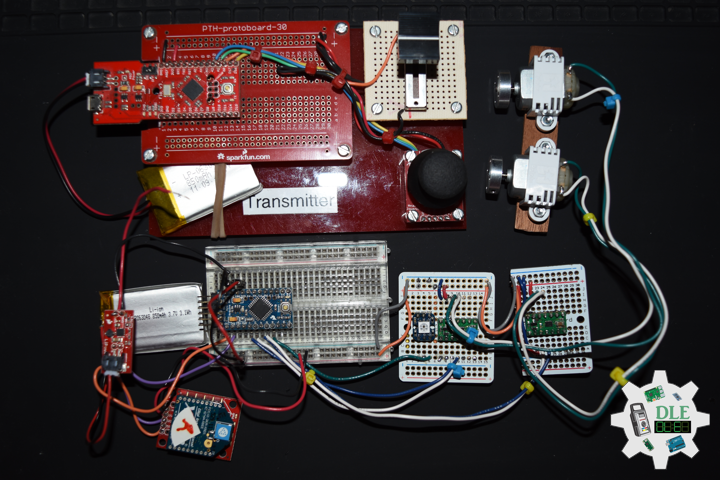
——
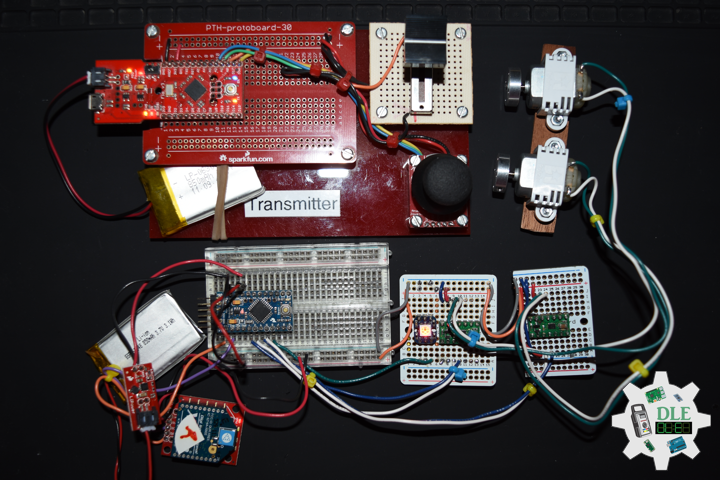
——
LiPower Boost Converter
The LiPower board is based on the incredibly versatile TPS61200 boost converter. The board is configured to be used with a LiPo battery, has solder jumper selectable 5V and 3.3V output, and an under voltage protection of 2.6V. However, the board can also be used as a general purpose buck and boost regulator with an input voltage as low as 0.3V. With such a low input voltage and quiescent current, the board also works well in energy harvesting applications that use low input voltages.
XBee Explorer Regulated
The XBee Explorer Regulated takes care of the 3.3V regulation, signal conditioning, and basic activity indicators. It translates the 5V serial signals to 3.3V so that you can connect a 5V system to any XBee module. The board was conveniently designed to mate directly with Arduino Pro boards for wireless bootloading and USB based configuration. This unit works with all XBee modules including the Series 1 and Series 2.5, standard and Pro versions. Plug an XBee into this breakout and you will have direct access to the serial and programming pins on the XBee unit and will be able to power the XBee with 5V.
DL2201Mk03
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x LiPower Boost Converter
2 x XBee S1
1 x XBee Explorer Regulated
2 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2201Mk03t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - LiPower Boost Converter - Mk19
01-03
DL2201Mk03t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-19t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
——
DL2201Mk03r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - LiPower Boost Converter - Mk19
01-03
DL2201Mk03r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x LiPower Boost Converter
1 x Lithium Ion Battery - 850mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-19r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – DC Motor – Mk18
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
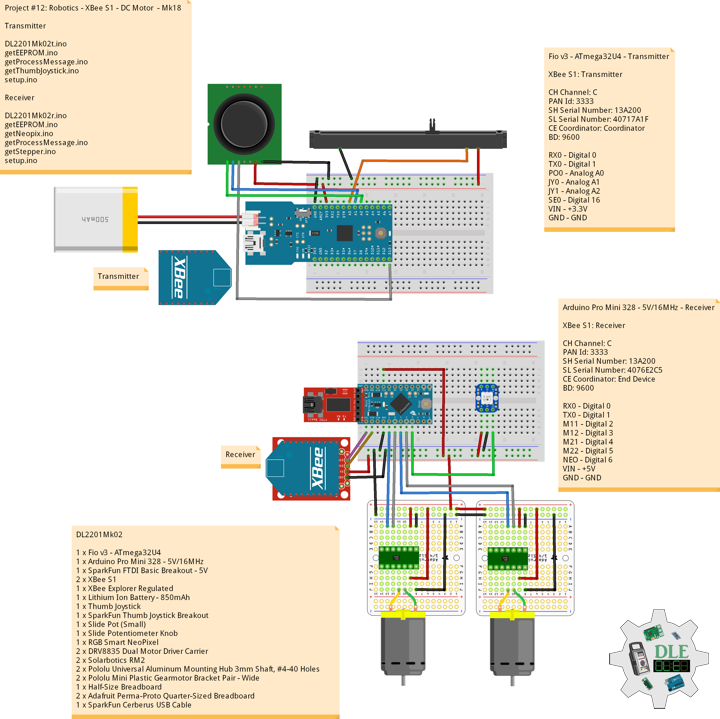
——
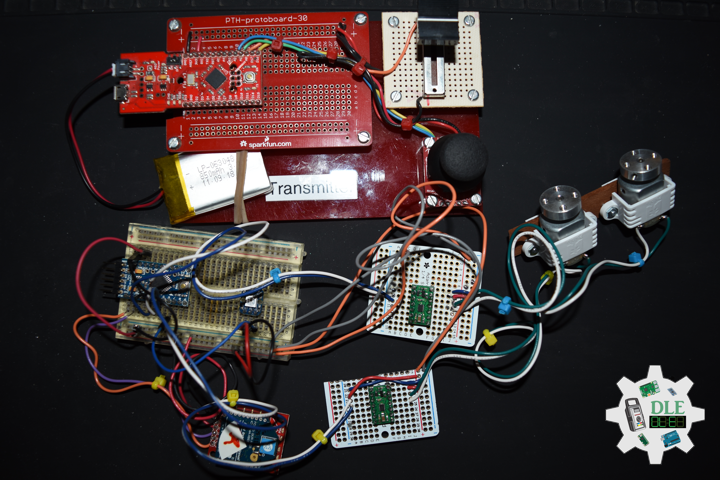
——
——
DC Motor
A DC motor is any of a class of rotary electrical motors that converts direct current electrical energy into mechanical energy. The most common types rely on the forces produced by magnetic fields. Nearly all types of DC motors have some internal mechanism, either electromechanical or electronic, to periodically change the direction of current in part of the motor.
DC motors were the first form of motor widely used, as they could be powered from existing direct-current lighting power distribution systems. A DC motor’s speed can be controlled over a wide range, using either a variable supply voltage or by changing the strength of current in its field windings. Small DC motors are used in tools, toys, and appliances. The universal motor can operate on direct current but is a lightweight brushed motor used for portable power tools and appliances. Larger DC motors are currently used in propulsion of electric vehicles, elevator and hoists, and in drives for steel rolling mills. The advent of power electronics has made replacement of DC motors with AC motors possible in many applications.
DL2201Mk02
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2201Mk02t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - DC Motor - Mk18
01-02
DL2201Mk02t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-18t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
——
DL2201Mk02r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - DL2201Mk02r - Mk18
01-02
DL2201Mk02r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-18r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc