——
#DonLucElectronics #DonLuc #Sensors #CCS811 #BME280 #TSOP85 #TMP102 #LineSensor #AlcoholGasSensor #MinIMU9 #Pololu #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
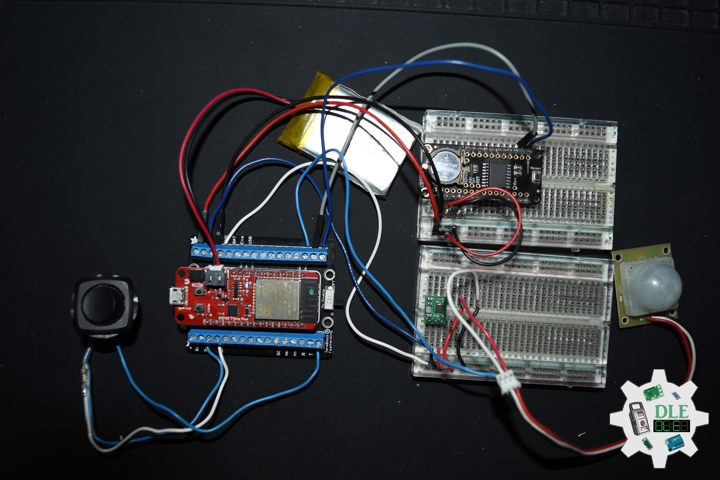
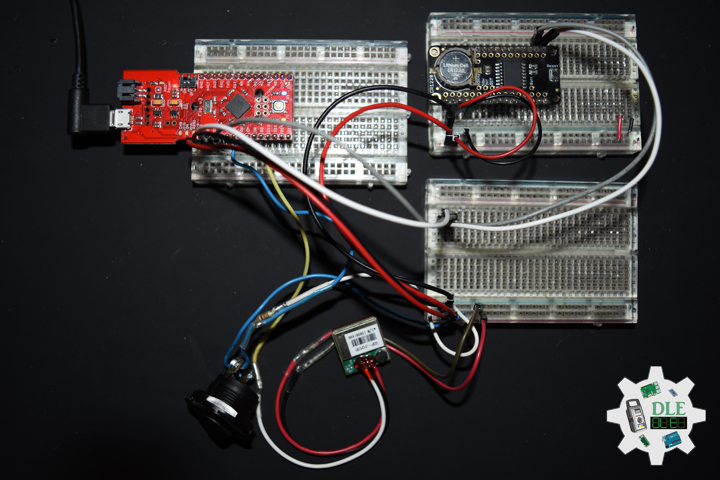
SparkFun Environmental Combo – CCS811/BME280
The SparkFun CCS811/BME280 Environmental Combo Breakout takes care of all your atmospheric-quality sensing needs with the popular CCS811 and BME280 ICs. This unique breakout provides a variety of environmental data, including barometric pressure, humidity, temperature, TVOCs and equivalent eCO2 levels.
The CCS811 is an exceedingly popular sensor, providing readings for equivalent eCO2 in the parts per million (PPM) and total volatile organic compounds in the parts per billion (PPB). The CCS811 also has a feature that allows it to fine-tune its readings if it has access to the current humidity and temperature. Luckily for us, the BME280 provides humidity, temperature and barometric pressure. This allows the sensors to work together to give us more accurate readings than they’d be able to provide on their own. We also made it easy to interface with them via I2C.
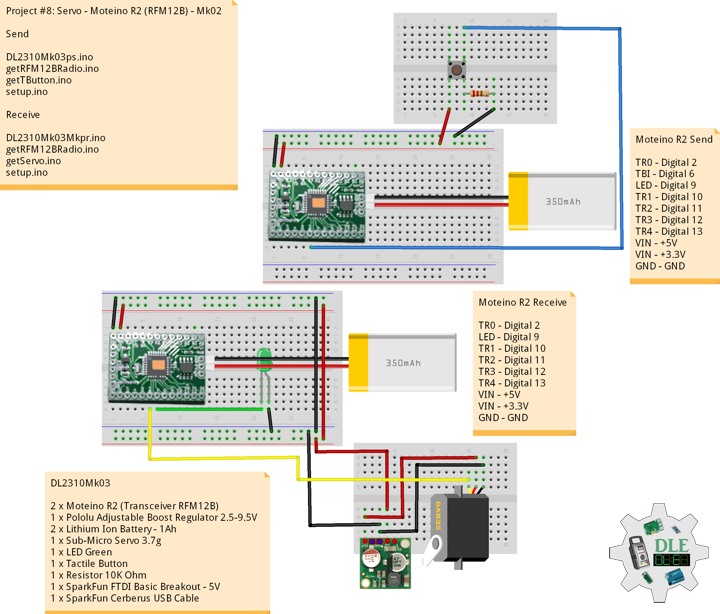
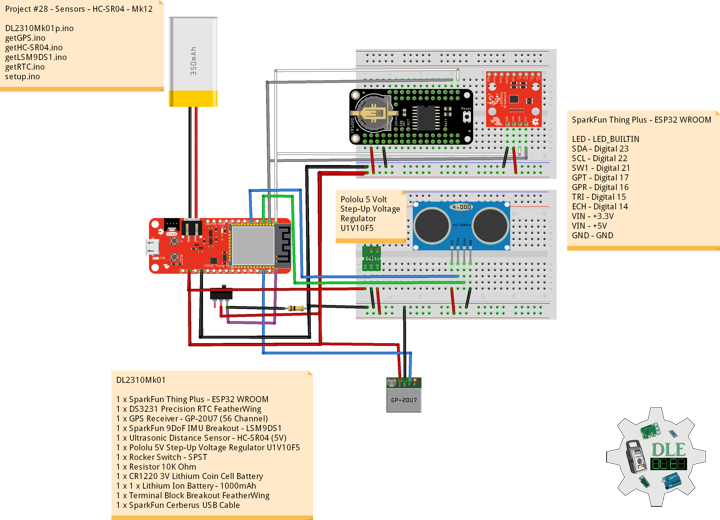
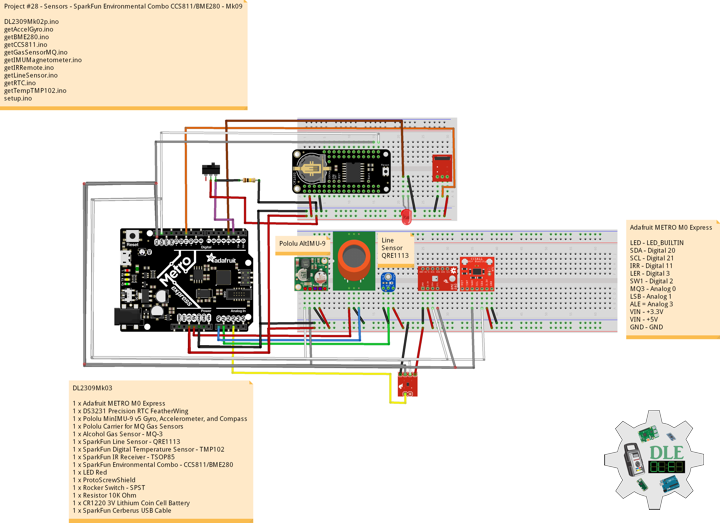
DL2309Mk03
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
1 x Pololu Carrier for MQ Gas Sensors
1 x Alcohol Gas Sensor – MQ-3
1 x SparkFun Line Sensor – QRE1113
1 x SparkFun Digital Temperature Sensor – TMP102
1 x SparkFun IR Receiver – TSOP85
1 x SparkFun Environmental Combo – CCS811/BME280
1 x LED Red
1 x ProtoScrewShield
1 x Rocker Switch – SPST
2 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
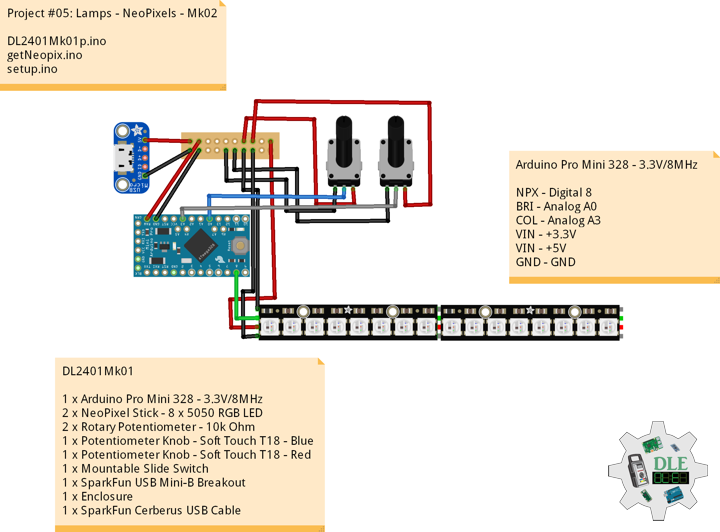
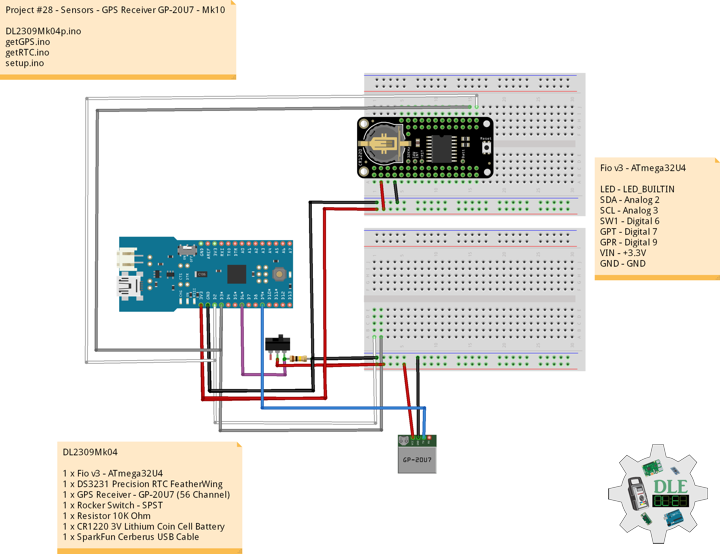
Adafruit METRO M0 Express
LED – LED_BUILTIN
SDA – Digital 20
SCL – Digital 21
IRR – Digital 11
LER – Digital 3
SW1 – Digital 2
MQ3 – Analog 0
LSB – Analog 1
ALE = Analog 3
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2309Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - SparkFun Environmental Combo CCS811/BME280 - Mk09
28-09
DL2309Mk03p.ino
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
1 x Pololu Carrier for MQ Gas Sensors
1 x Alcohol Gas Sensor - MQ-3
1 x SparkFun Line Sensor - QRE1113
1 x SparkFun Digital Temperature Sensor - TMP102
1 x SparkFun IR Receiver - TSOP85
1 x SparkFun Environmental Combo - CCS811/BME280
1 x LED Red
1 x ProtoScrewShield
1 x Rocker Switch - SPST
2 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// DS3231 Precision RTC
#include <RTClib.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Keyboard
#include <Keyboard.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL Magnetometer
#include <LIS3MDL.h>
// SparkFun Digital Temperature Sensor TMP102
#include <SparkFunTMP102.h>
// SparkFun IR Receiver - TSOP85
#include <IRremote.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Keyboard
String sKeyboard = "";
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Pololu 9DoF IMU
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL Magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// Gas Sensors MQ
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A0;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// SparkFun Line Sensor - QRE1113 (Analog)
int iLine = A1;
int iLineSensor = 0;
// SparkFun Digital Temperature Sensor TMP102
const int ALERT_PIN = A3;
TMP102 sensor0;
float temperature;
boolean alertPinState;
boolean alertRegisterState;
// SparkFun IR Receiver - TSOP85
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
String IRValue = "";
int iLEDRed = 3;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
// The number of the Rocker Switch pin
int iSwitch = 2;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-09";
void loop() {
// Date and Time RTC
isRTC ();
// Pololu Accelerometer and Gyroscopes
isIMU();
// Pololu Magnetometer
isMag();
// Gas Sensors MQ
isGasSensor();
// SparkFun Line Sensor
isLineSensor();
// SparkFun Temperature TMP102
isTMP102();
// SparkFun IR Receiver - TSOP85
isIR();
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
Keyboard.println(sKeyboard);
}
// Delay 1 Second
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// Keyboard
sKeyboard = sKeyboard + String(imuAX) + "|" + String(imuAY) + "|"
+ String(imuAZ) + "|";
sKeyboard = sKeyboard + String(imuGX) + "|" + String(imuGY) + "|"
+ String(imuGZ) + "|";
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Keyboard
sKeyboard = sKeyboard + String(BMEtempC) + "|" + String(BMEhumid) + "|" +
String(BMEpressure) + "|" + String(BMEaltitudeM) + "|";
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// Keyboard
sKeyboard = sKeyboard + String(CCS811CO2) + "|" + String(CCS811TVOC) + "|*";
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
// Keyboard
sKeyboard = sKeyboard + String(iMQ3ppm) + "|";
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue;
// % BAC = breath mg/L * 0.21
double bac = RvRo * 0.21;
return bac;
}
getIMUMagnetometer.ino
// IMU Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// Keyboard
sKeyboard = sKeyboard + String(magX) + "|" + String(magY) + "|"
+ String(magZ) + "|";
}
getIRRemote.ino
// SparkFun IR Receiver - TSOP85
// Setup
void isSetupIR(){
// Initialize digital pin LED Red as an output
pinMode(iLEDRed, OUTPUT);
// Start the receiver
irrecv.enableIRIn();
}
//
void isIR(){
if (irrecv.decode(&results))
{
// LED Red HIGH
digitalWrite(iLEDRed, HIGH);
//Serial.print("IR RECV Code = 0x ");
//Serial.println(results.value, HEX);
IRValue = "0x ";
IRValue = IRValue + String(results.value, HEX);
// LED Red LOW
digitalWrite(iLEDRed, LOW);
// IR Resume
irrecv.resume();
}
else {
IRValue = "0";
}
// Keyboard
sKeyboard = sKeyboard + String(IRValue) + "|";
}
getLineSensor.ino
// Line Sensor
// isLine Sensor
void isLineSensor(){
// Line Sensor
iLineSensor = analogRead(iLine);
// Keyboard
sKeyboard = sKeyboard + String(iLineSensor) + "|";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void setupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// Keyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC) + "|" +
String(timeRTC) + "|";
}
getTempTMP102.ino
// SparkFun Digital Temperature Sensor TMP102
// Setup TMP102
void isSetupTMP102(){
// Declare alertPin as an input
pinMode(ALERT_PIN,INPUT);
// Begin
//It will return true on success or false on failure to communicate
if(!sensor0.begin())
{
while(1);
}
// set the Conversion Rate
//0-3: 0:0.25Hz, 1:1Hz, 2:4Hz, 3:8Hz
sensor0.setConversionRate(2);
//set Extended Mode.
//0:12-bit Temperature(-55C to +128C) 1:13-bit Temperature(-55C to +150C)
sensor0.setExtendedMode(0);
// Set T_HIGH, the upper limit to trigger the alert on
// Set T_HIGH in C
sensor0.setHighTempC(29.4);
// Set T_LOW, the lower limit to shut turn off the alert
// set T_LOW in C
sensor0.setLowTempC(27.67);
}
// is TMP102
void isTMP102(){
// Turn sensor on to start temperature measurement.
// Current consumtion typically ~10uA.
sensor0.wakeup();
// read temperature data C
temperature = sensor0.readTempC();
// Check for Alert
// Read the Alert from pin
alertPinState = digitalRead(ALERT_PIN);
// Read the Alert from register
alertRegisterState = sensor0.alert();
// Place sensor in sleep mode to save power.
// Current consumtion typically <0.5uA.
sensor0.sleep();
// Keyboard
sKeyboard = sKeyboard + String(temperature) + "|" +
String(alertPinState) + "|" + String(alertRegisterState) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
setupRTC();
// Initialize control over the keyboard:
Keyboard.begin();
// Pololu Setup IMU
setupIMU();
// Pololu Setup Magnetometer
setupMag();
// Setup TMP102
isSetupTMP102();
// SetupTSOP85
isSetupIR();
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc