——
——
——
——
——
XBee
Digi XBee is the brand name of a family of form factor compatible radio modules from Digi International. The first XBee radios were introduced under the MaxStream brand in 2005 and were based on the IEEE 802.15.4-2003 standard designed for point-to-point and star communications at over-the-air baud rates of 250 kbit/s.
Two models were initially introduced, a lower cost 1 mW XBee and the higher power 100 mW XBee-PRO. Since the initial introduction, a number of new XBee radios have been introduced and an ecosystem of wireless modules, gateways, adapters and software has evolved.
The XBee radios can all be used with the minimum number of connections — power (3.3 V), ground, data in and data out (UART), with other recommended lines being Reset and Sleep. Additionally, most XBee families have some other flow control, input/output (I/O), analog-to-digital converter (A/D) and indicator lines built in.
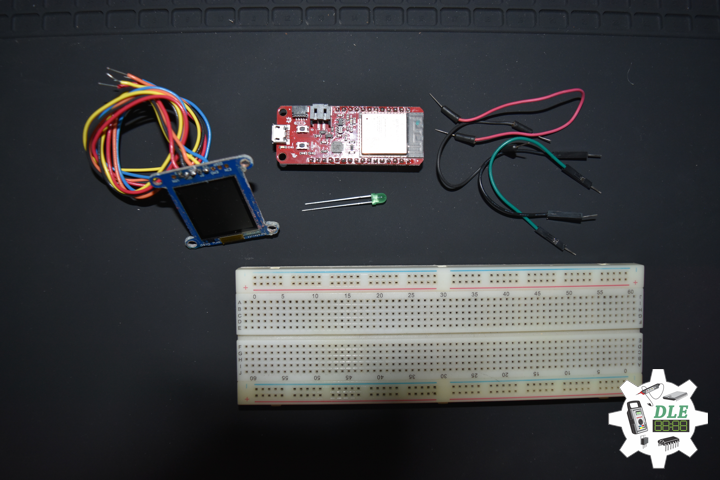
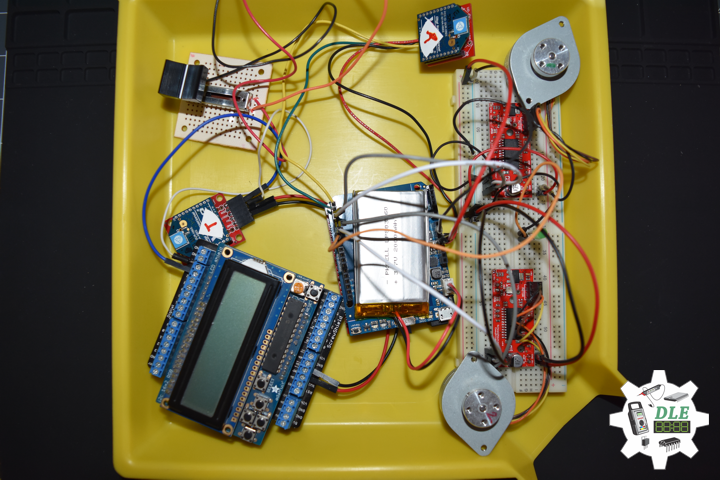
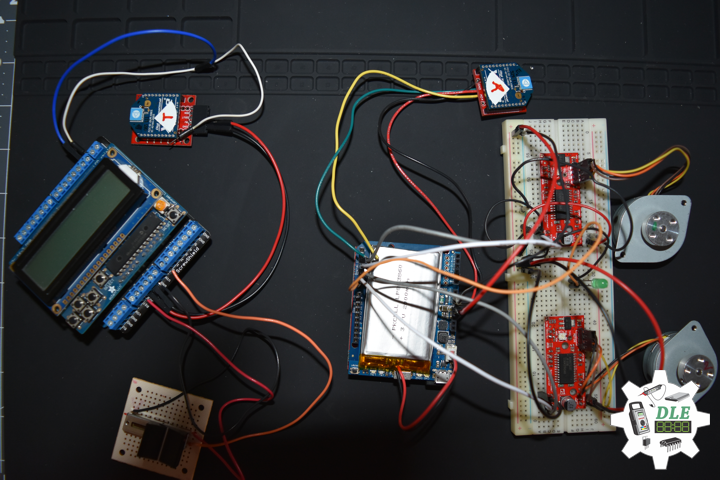
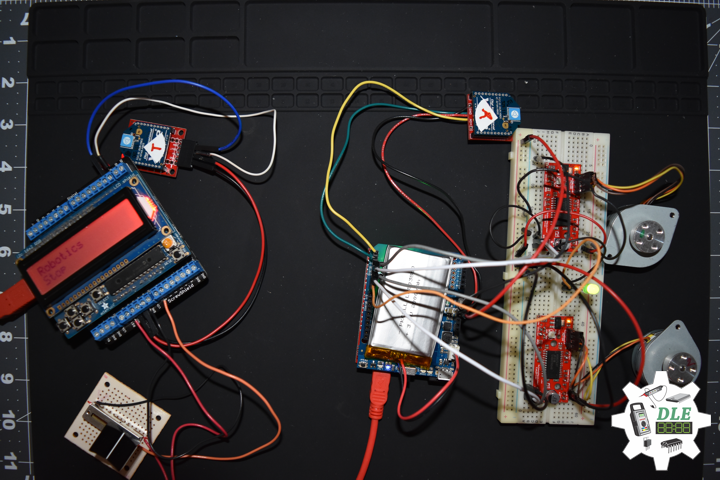
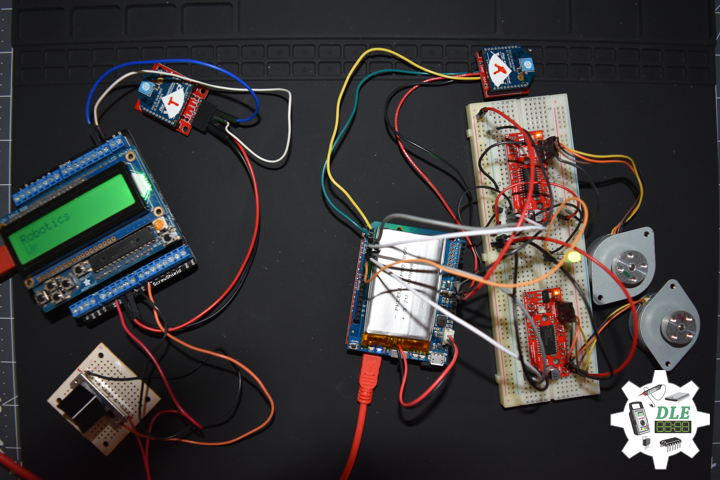
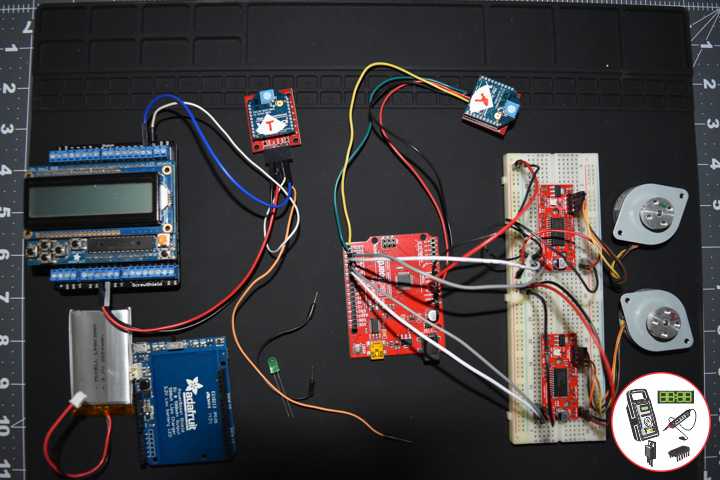
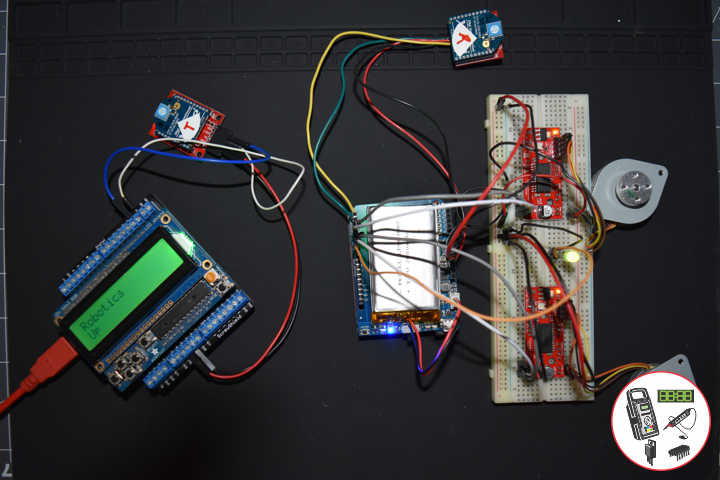
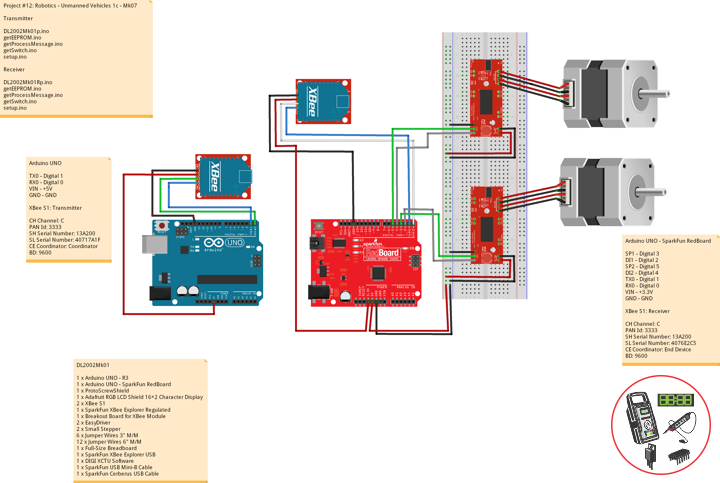
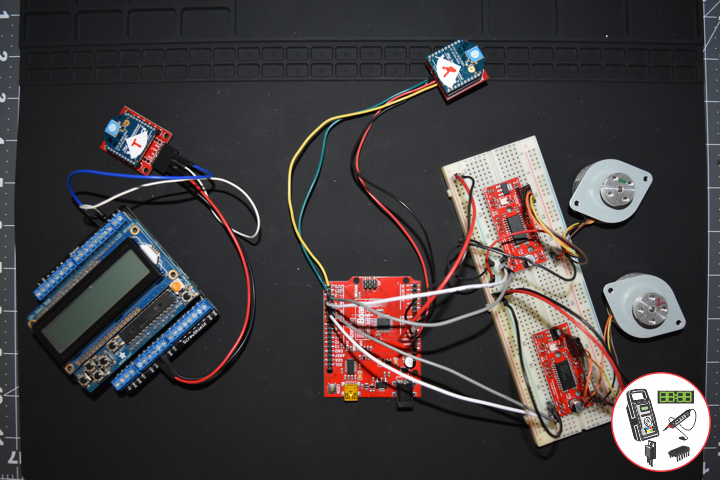
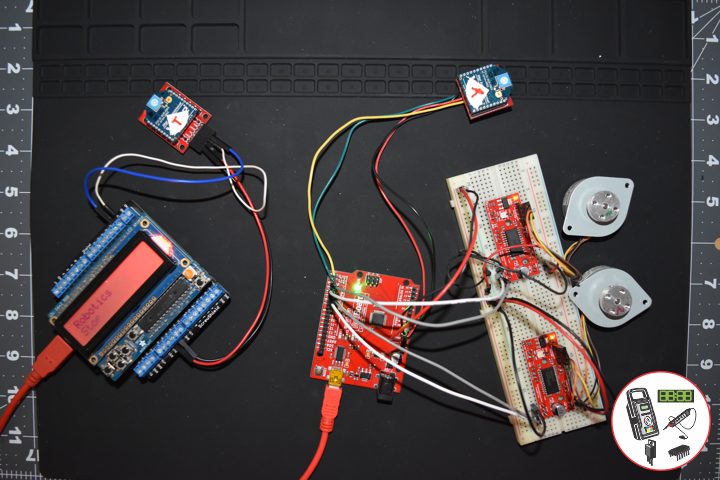
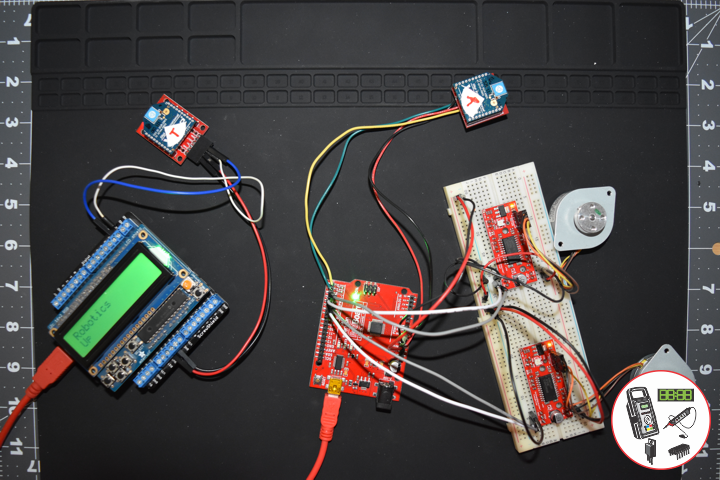
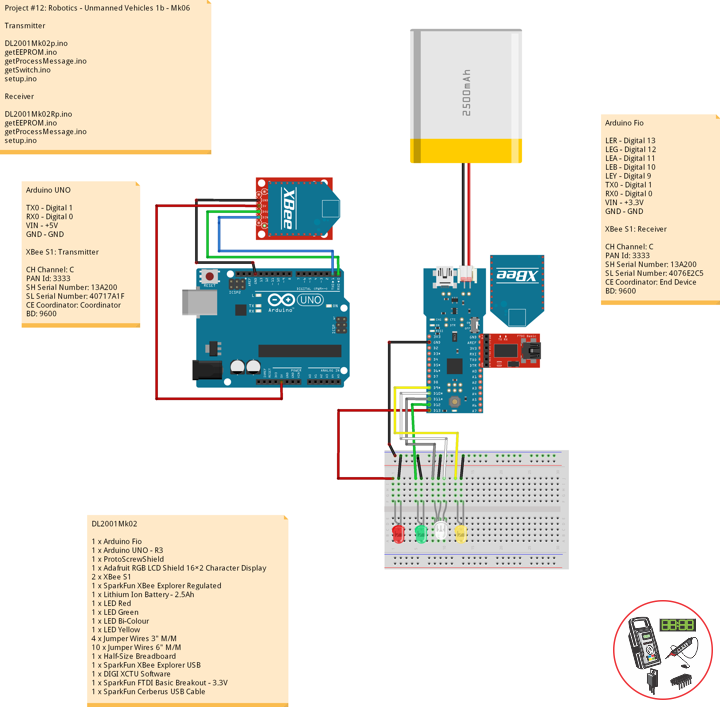
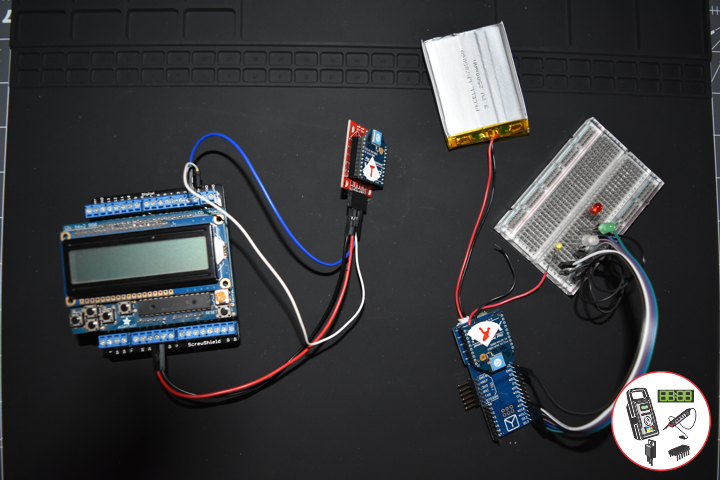
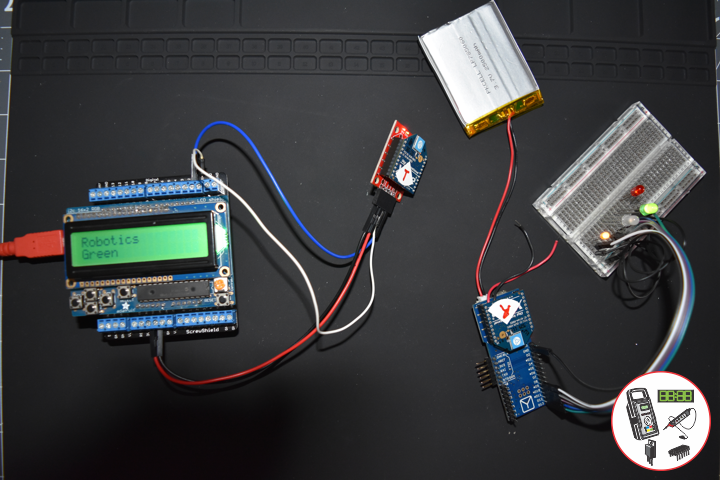
DL2001Mk02
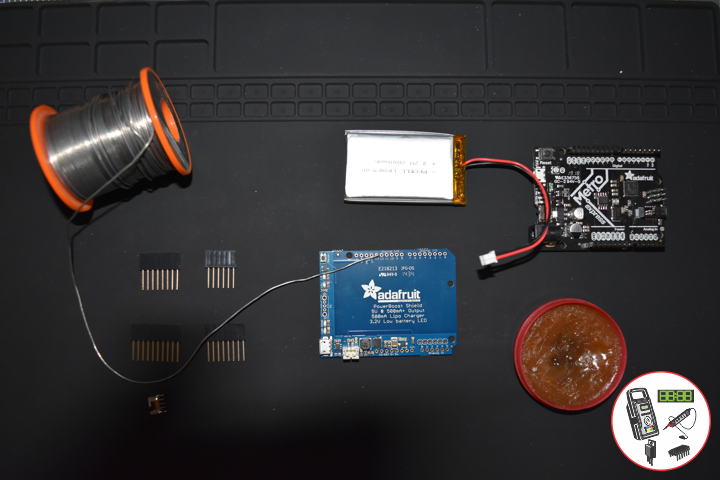
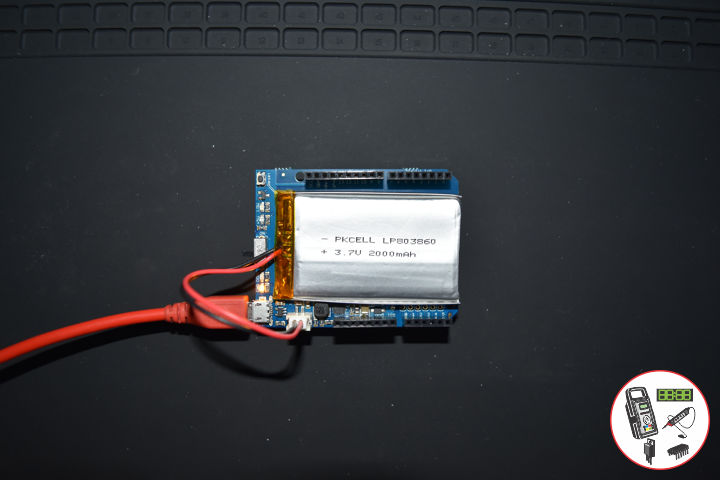
1 x Arduino Fio
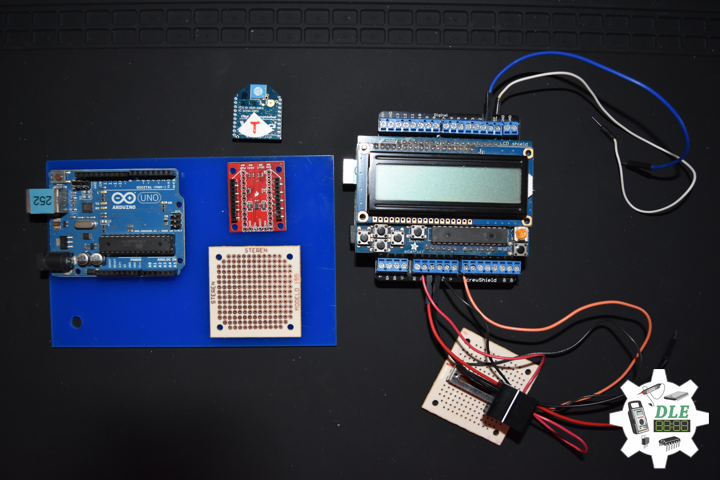
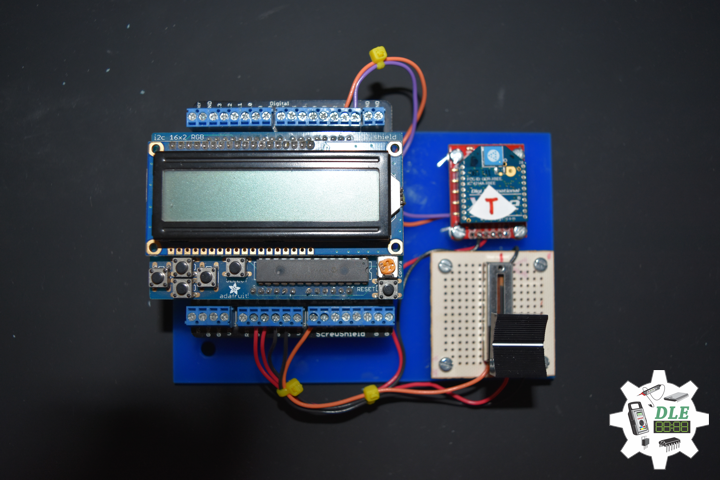
1 x Arduino UNO – R3
1 x ProtoScrewShield
1 x Adafruit RGB LCD Shield 16×2 Character Display
2 x XBee S1
1 x SparkFun XBee Explorer Regulated
1 x Lithium Ion Battery – 2.5Ah
1 x LED Red
1 x LED Green
1 x LED Bi-Colour
1 x LED Yellow
4 x Jumper Wires 3″ M/M
10 x Jumper Wires 6″ M/M
1 x Half-Size Breadboard
1 x SparkFun XBee Explorer USB
1 x DIGI XCTU Software
1 x SparkFun FTDI Basic Breakout – 3.3V
1 x SparkFun Cerberus USB Cable
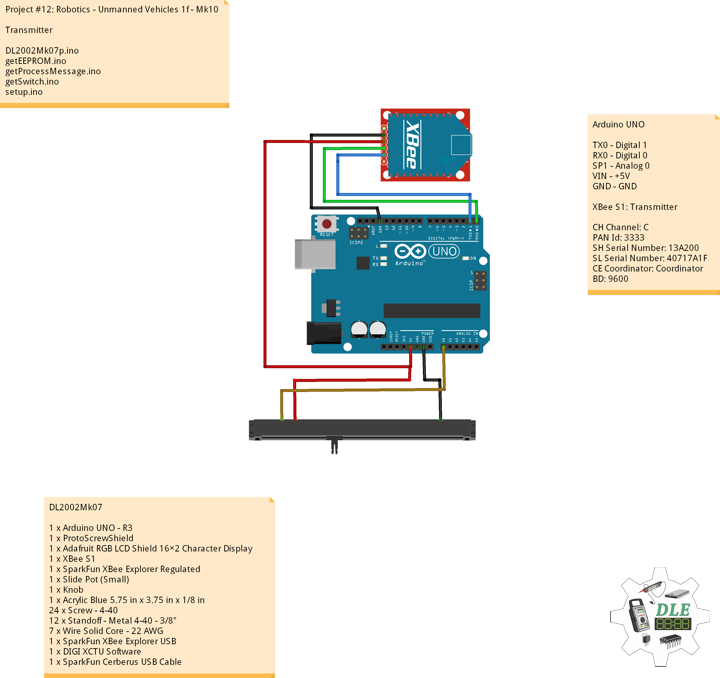
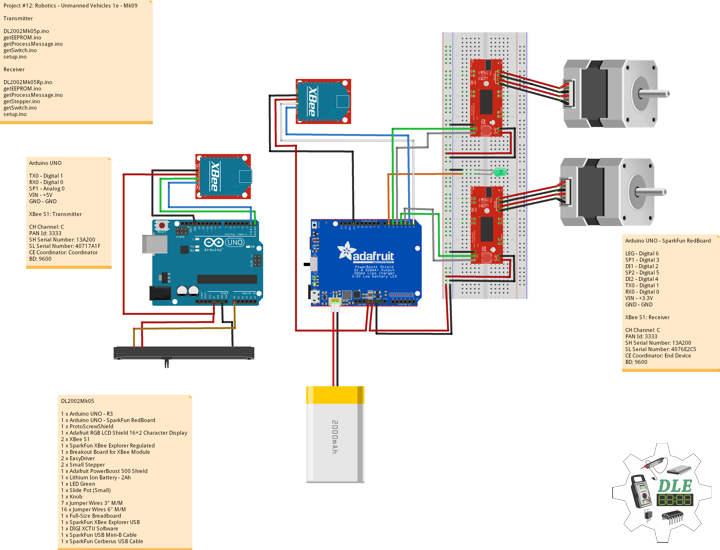
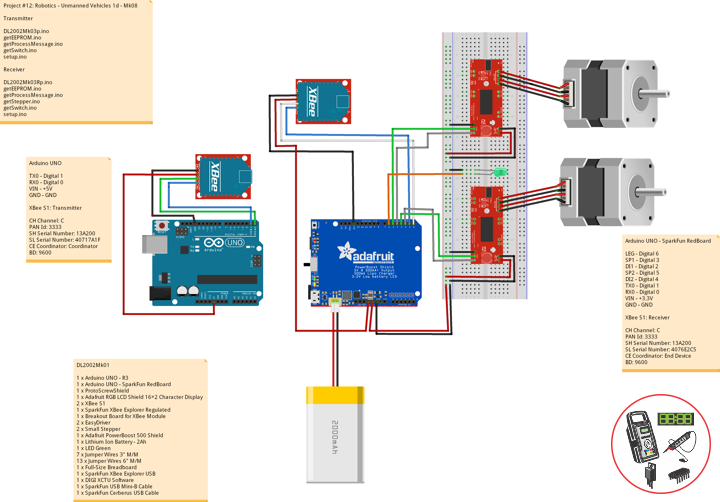
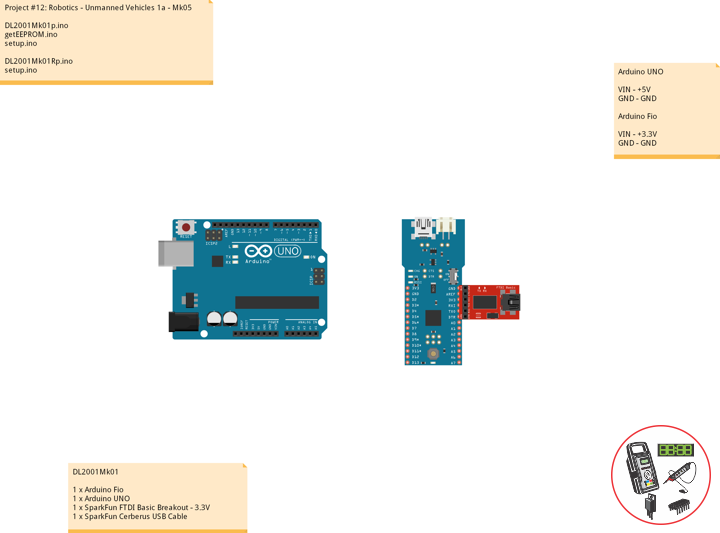
Arduino UNO
TX0 – Digital 1
RX0 – Digital 0
VIN – +5V
GND – GND
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
DL2001Mk02p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1b - Mk06
// 01-02
// DL2001Mk01p.ino 12-06
// Arduino UNO - R3
// ProtoScrewShield
// Adafruit RGB LCD Shield 16×2 Character Display
// EEPROM with Unique ID
// Transmitter
// XBee S1
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Adafruit RGB LCD Shield
#include <Adafruit_RGBLCDShield.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// Communication
unsigned long dTime = 1000;
// The current address in the EEPROM (i.e. which byte we're going to read to next)
// Version
String sver = "12-2.p";
// Unit ID Information
String uid = "";
void loop() {
// Clear
RGBLCDShield.clear();
// set the cursor to column 0, line 0
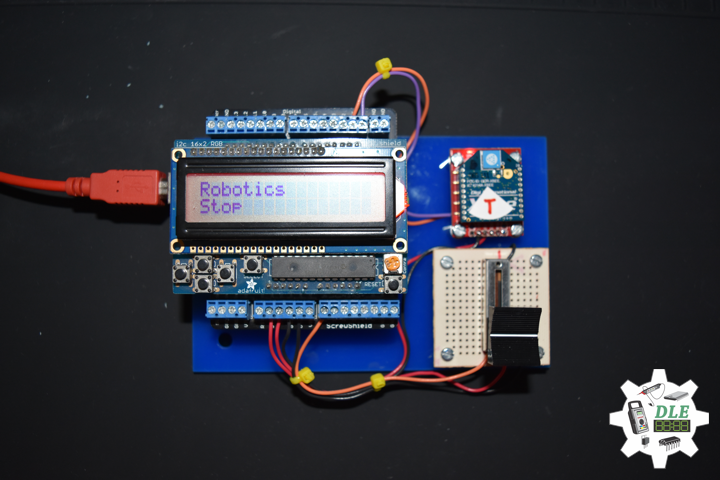
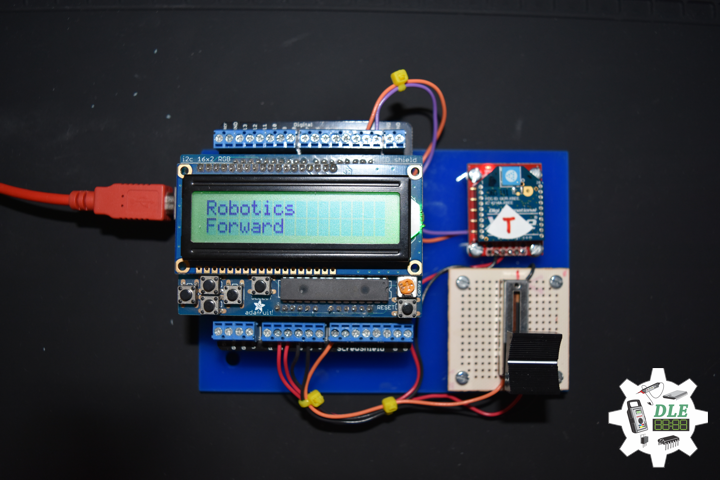
RGBLCDShield.setCursor(0,0);
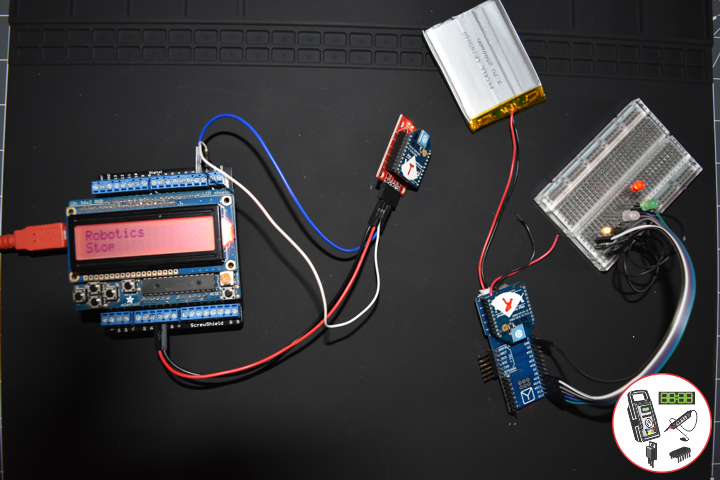
RGBLCDShield.print("Robotics"); // Robotics
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// LED Green
isSwitch1();
break;
case 2:
// LED Bipolar (Green)
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// LED Red
isSwitch5();
break;
default:
// LED Red
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// LED Green
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// LED Bipolar A
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// LED Bipolar B
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// LED Bipolar A B
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// LED Red
RGBLCDShield.setBacklight(RED);
}
}
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
//int incb = 0;
String msg = "";
/// Loop through serial buffer one byte at a time until you reach * which will be end of message
//while ( Serial.available() )
// {
// Print => XBEE + Unit ID + Version + *
msg = "XBEE|" + uid + "|" + sver + "|" + yy + "|*";
Serial.println( msg );
// }
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
yy = 1;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Green");
}
// Switch 2
void isSwitch2(){
yy = 2;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Bi-Colour A");
}
// Switch 3
void isSwitch3(){
yy = 3;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Bi-Colour B");
}
// Switch 4
void isSwitch4(){
yy = 4;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Bi-Colour A B");
}
// Switch 5
void isSwitch5(){
yy = 5;
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
//delay( 250 );
isSwitchLEDStop();
// LED
// turn LED on:
//digitalWrite(iLEDRed, HIGH);
}
void isSwitchLEDStop(){
//digitalWrite(iLEDRed, LOW);
//digitalWrite(iLEDGreen, LOW);
//digitalWrite(iLEDB1, LOW);
//digitalWrite(iLEDB2, LOW);
//digitalWrite(iLEDYellow, LOW);
}
setup.ino
// Setup
void setup() {
//Open serial port at 9600 baud
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
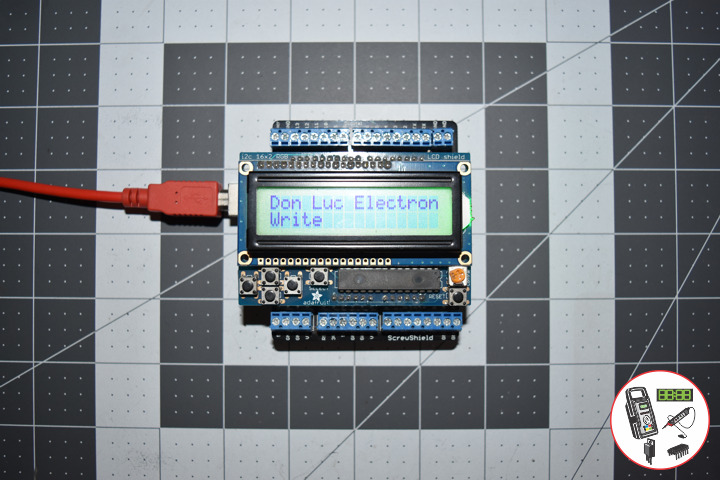
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // Robotics
// Serial
Serial.println( "Don Luc Electronics");
Serial.println( "Robotics");
delay(5000);
// Clear
RGBLCDShield.clear();
// Display
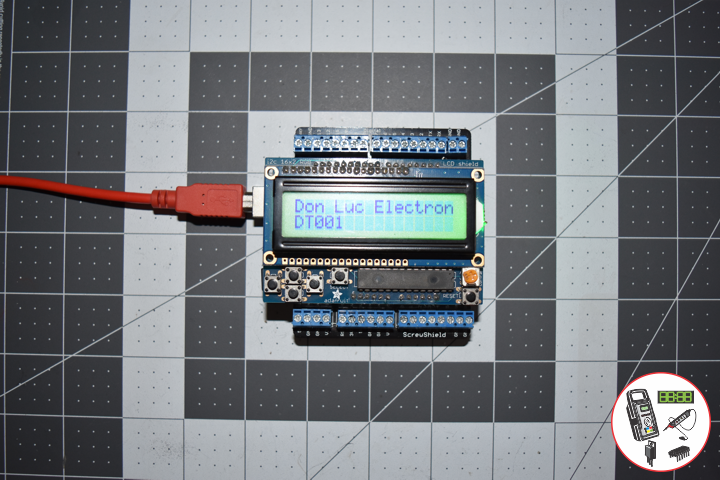
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Version: "); // Version
RGBLCDShield.print( sver );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("UID: "); // Unit ID Information
RGBLCDShield.print( uid );
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
// Clear
RGBLCDShield.clear();
}
Arduino Fio
LER – Digital 13
LEG – Digital 12
LEA – Digital 11
LEB – Digital 10
LEY – Digital 9
TX0 – Digital 1
RX0 – Digital 0
VIN – +3.3V
GND – GND
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
DL2001Mk02Rp.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1b - Mk06
// 01-02
// DL2001Mk02Rp.ino 12-06
// Arduino Fio
// SparkFun FTDI Basic Breakout - 3.3V
// EEPROM with Unique ID
// LED Red
// LED Green
// LED Bi-Colour
// LED Yellow
// Lithium Ion Battery - 2.5Ah
// Receiver
// XBee S1
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// LED Red
int iLEDRed = 13;
// LED Green
int iLEDGreen = 12;
// LED Bi-Colour
int iLEDBiCoA = 11;
int iLEDBiCoB = 10;
// LED Yellow
int iLEDYellow = 9;
// Momentary Button
int yy = "";
// Software Version Information
String sver = "12-02";
// Unit ID information
String uid = "DR001";
void loop() {
// Check for serial messages
if ( Serial.available() )
{
isProcessMessage();
}
// Switch
isSwitch();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
int incb = 0;
String msg = "";
String zzz = "";
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() )
{
// Read the incoming byte:
incb = Serial.read();
// Add character to string
msg = msg + char(incb);
// Check if receive character is the end of message *
if ( incb == 42 )
{
Serial.println(msg);
zzz = msg.charAt( 18 );
Serial.println(zzz);
yy = zzz.toInt();
Serial.println( yy );
}
}
}
getSwitch.ino
// Switch
// isSwitch
void isSwitch(){
switch ( yy ) {
case 1:
// LED Green
sLEDStop();
digitalWrite(iLEDGreen, HIGH);
delay( 1000 );
break;
case 2:
// LED Bi-Colour A
sLEDStop();
digitalWrite(iLEDBiCoA, HIGH);
delay( 1000 );
break;
case 3:
// LED Bi-Colour B
sLEDStop();
digitalWrite(iLEDBiCoB, HIGH);
delay( 1000 );
break;
case 4:
// LED Bi-Colour A B
sLEDStop();
digitalWrite(iLEDBiCoA, HIGH);
digitalWrite(iLEDBiCoB, HIGH);
delay( 1000 );
break;
case 5:
// LED Red
sLEDStop();
digitalWrite(iLEDRed, HIGH);
delay( 1000 );
break;
default:
// LED Red
sLEDStop();
digitalWrite(iLEDRed, HIGH);
delay( 1000 );
}
}
// LED Stop
void sLEDStop(){
digitalWrite(iLEDRed, LOW);
digitalWrite(iLEDGreen, LOW);
digitalWrite(iLEDBiCoA, LOW);
digitalWrite(iLEDBiCoB, LOW);
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
// LED => OUTPUT
pinMode(iLEDRed, OUTPUT);
pinMode(iLEDGreen, OUTPUT);
pinMode(iLEDBiCoA, OUTPUT);
pinMode(iLEDBiCoB, OUTPUT);
pinMode(iLEDYellow, OUTPUT);
// LED Yellow
digitalWrite(iLEDYellow, HIGH);
}
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc