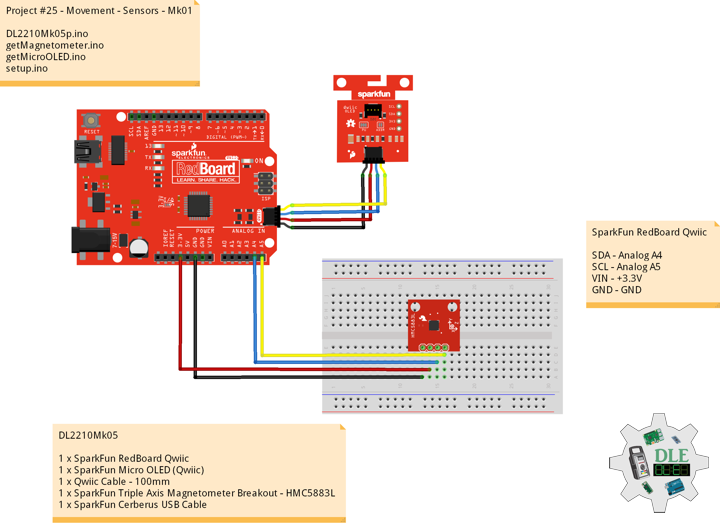
Project #25 – Movement – Sensors – Mk01
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #Movement #Magnetometer #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Movement
Accelerometers, gyroscopes, and magnetometers are the three main sensors we use for detecting motion and orientation. We can sense motion with an accelerometer.
Accelerometers are used to measure acceleration, that means linear motion in X, Y or Z. They can be used to detect when they are being moved around, detect motion, shock or vibration. They can also be used to detect gravitational pull in order to detect orientation or tilt.
Gyroscopes are used to measure rotational motion in X, Y or Z. They are often paired with accelerometers for inertial guidance systems, 3D motion capture and inverted pendulum type applications.
Magnetometers can sense where the strongest magnetic force is coming from, generally used to detect magnetic north, but can also be used for measuring magnetic fields. When combined with accelerometers and gyroscopes you can stabilize orientation calculations and also determine orientation with respect to the Earth.
Many 6-DoF sensors, which combine accelerometer and gyroscope or compass, accelerometer and magnetometer, and 9-DoF sensors that have 9DoF IMU accelerometers and gyroscopes and magnetometers.
DL2210Mk05
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable – 100mm
1 x SparkFun Triple Axis Magnetometer Breakout – HMC5883L
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
DL2210Mk05p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #25 - Movement - Sensors - Mk01
25-01
DL2210Mk05p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable - 100mm
1 x SparkFun Triple Axis Magnetometer Breakout - HMC5883L
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Triple Axis Magnetometer
HMC5883L compass;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Triple Axis Magnetometer
int X = 0;
int Y = 0;
int Z = 0;
// Software Version Information
String sver = "25-01";
void loop() {
// Triple Axis Magnetometer
isMagnetometer(),
// Micro OLED
isMicroOLED();
// One delay in between reads
delay(1000);
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMagnetometer(){
// Magnetometer Serial
// Initialize HMC5883L
while (!compass.begin())
{
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
}
// Magnetometer
void isMagnetometer(){
// Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
// X Normalize
X = norm.XAxis;
// Y Normalize
Y = norm.YAxis;
// Z Normalize
Z = norm.ZAxis;
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display Magnetometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Magnetometer
oled.print("Magneto");
oled.setCursor(0, 12);
// X Normalize
oled.print("X: ");
oled.print(X);
oled.setCursor(0, 25);
// Y Normalize
oled.print("Y: ");
oled.print(Y);
oled.setCursor(0, 39);
// Z Normalize
oled.print("Z: ");
oled.print(Z);
oled.display();
}
setup.ino
// Setup
void setup() {
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Triple Axis Magnetometer
isSetupMagnetometer();
// Setup Micro OLED
isSetupMicroOLED();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
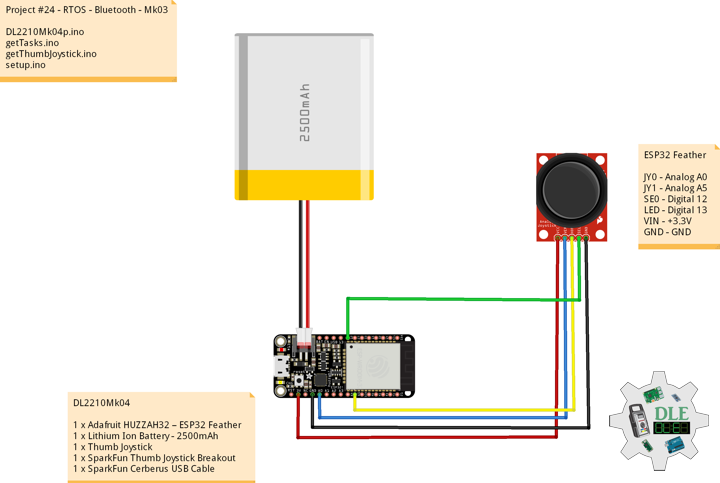
Project #24 – RTOS – Bluetooth – Mk03
——
#DonLucElectronics #DonLuc #ESP32 #RTOS #FreeRTOS #Bluetooth #ThumbJoystick #Keyboard #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
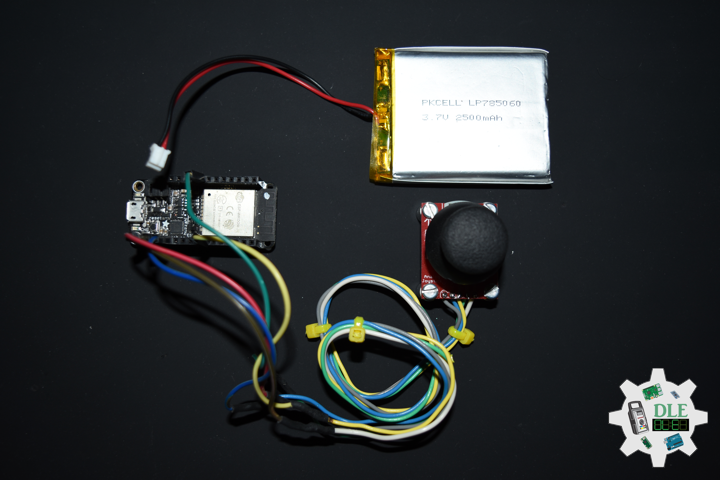
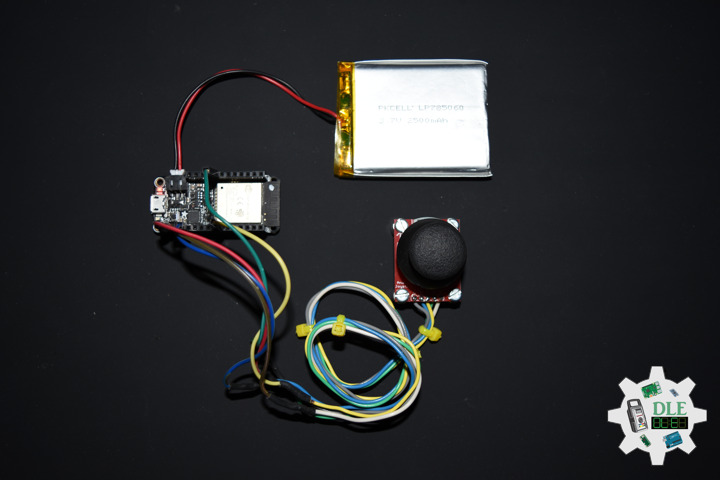
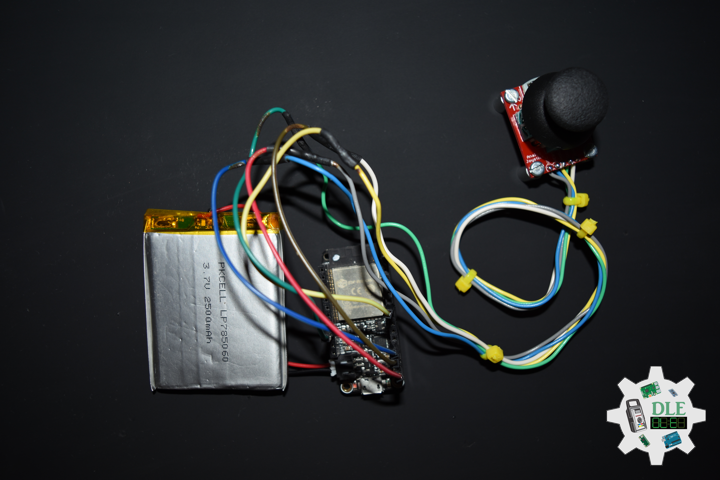
Joystick
A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. Joysticks are often used to control video games, and usually have one or more push-buttons whose state can also be read by the computer. A popular variation of the joystick used on modern video game consoles is the analog stick. Joysticks are also used for controlling machines such as cranes, trucks, underwater unmanned vehicles, wheelchairs, surveillance cameras, and zero turning radius lawn mowers. This is a joystick very similar to the analog joysticks on PS2 controllers. Directional movements are simply two potentiometers, one for each axis. Pots are 10k Ohm each. This joystick also has a select button that is actuated when the joystick is pressed down.
DL2210Mk04
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x SparkFun Cerberus USB Cable
ESP32 Feather
JY0 – Analog A0
JY1 – Analog A5
SE0 – Digital 12
LED – Digital 13
VIN – +3.3V
GND – GND
——
DL2210Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #24 - RTOS - Bluetooth - Mk03
24-03
DL2210Mk04p.ino
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x Lithium Ion Battery - 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// FreeRTOS ESP32
#if CONFIG_FREERTOS_UNICORE
#define ARDUINO_RUNNING_CORE 0
#else
#define ARDUINO_RUNNING_CORE 1
#endif
// ESP32 BLE Keyboard
#include <BleKeyboard.h>
// ESP32 BLE Keyboard
BleKeyboard bleKeyboard;
// Connections to joystick
// Vertical
const int VERT = A0;
// Horizontal
const int HORIZ = A5;
// Pushbutton
const int SEL = 12;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int selec;
// Led Built In
#ifndef LED_BUILTIN
#define LED_BUILTIN 13
#endif
// Define two tasks for Blink
void isTaskBlink( void *pvParameters );
// Software Version Information
String sver = "24-03";
void loop() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Thumb Joystick
isThumbJoystick();
}
// Delay
delay( 1000 );
}
getTasks.ino
// Tasks
// Setup Task
void isSetupTask(){
// Now set up two tasks to run independently
// TaskBlink
xTaskCreatePinnedToCore(
isTaskBlink
, "TaskBlink" // A name just for humans
, 1024 // This stack size can be checked & adjusted by reading.
, NULL
, 2 // Priority, with 2 being the highest, and 0 being the lowest.
, NULL
, ARDUINO_RUNNING_CORE);
// Now the task scheduler, which takes over control of scheduling individual tasks,
// is automatically started.
}
// This is a Task Blink
void isTaskBlink(void *pvParameters)
{
(void) pvParameters;
// Blink
// Turns on an LED on for 2 second, then off for 2 second, repeatedly
// Initialize digital LED_BUILTIN on pin 13 as an output.
pinMode(LED_BUILTIN, OUTPUT);
// A Task shall never return or exit
for (;;)
{
// Turn the LED on (HIGH is the voltage level)
digitalWrite(LED_BUILTIN, HIGH);
// One tick delay in between reads
vTaskDelay(2000);
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// One tick delay in between reads
vTaskDelay(2000);
}
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 2047 for the vertical and horizontal values
// Will be 0-4095
// Vertical
vertical = analogRead(VERT);
if (vertical == 4095) {
// Volume Up
bleKeyboard.write(KEY_MEDIA_VOLUME_UP);
} else if (vertical == 0) {
// Volume Down
bleKeyboard.write(KEY_MEDIA_VOLUME_DOWN);
}
// Horizontal
// Will be 0-4095
horizontal = analogRead(HORIZ);
if (horizontal == 4095) {
// Previous Track
bleKeyboard.write(KEY_MEDIA_PREVIOUS_TRACK);
} else if (horizontal == 0) {
// Next Track
bleKeyboard.write(KEY_MEDIA_NEXT_TRACK);
}
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
selec = digitalRead(SEL);
if (selec == 0) {
// Play/Pause media key
bleKeyboard.write(KEY_MEDIA_PLAY_PAUSE);
}
}
setup.ino
// Setup
void setup() {
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// ESP32 BLE Keyboard
bleKeyboard.begin();
// Setup Task
isSetupTask();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #24 – RTOS – Magnetometers HMC5883L – Mk02
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #RTOS #FreeRTOS #Magnetometer #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
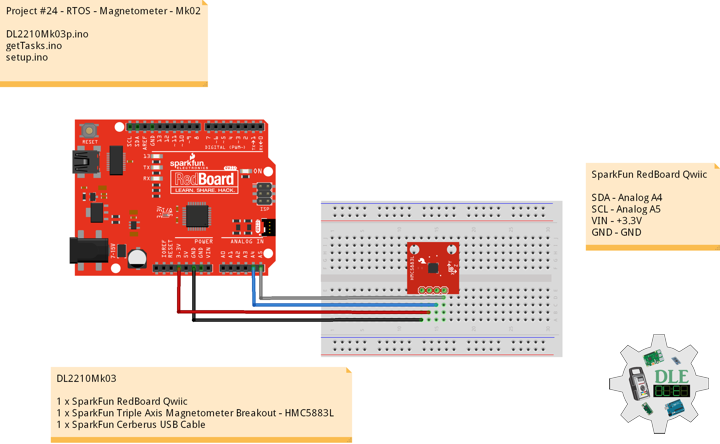
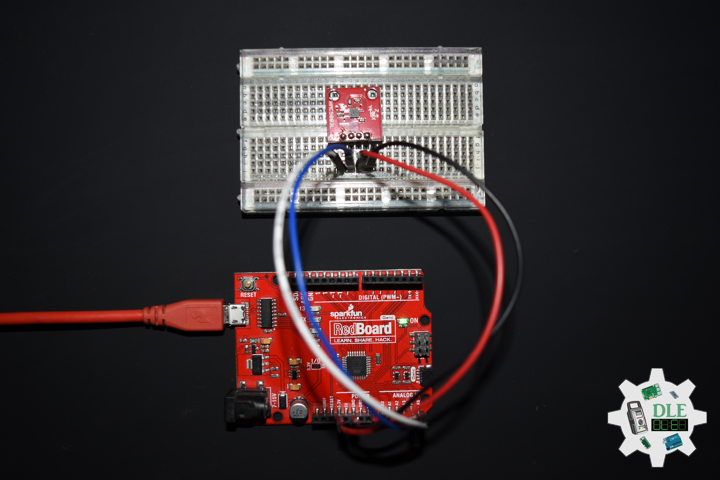
SparkFun Triple Axis Magnetometer Breakout – HMC5883L
This is a breakout board for Honeywell’s HMC5883L, a 3-axis digital compass. Communication with the HMC5883L is simple and all done through an I2C interface. There is no on-board regulator, so a regulated voltage of 2.16-3.6VDC should be supplied. The breakout board includes the HMC5883L sensor and all filtering capacitors as shown. The power and 2-wire interface pins are all broken out to a 0.1″ pitch header.
Magnetometers have a wide range of uses. The most common include using the chip as a digital compass to sense direction or using them to detect ferrous (magnetic) metals. Magnetic fields and current go hand-in-hand. When current flows through a wire, a magnetic field is created. This is the basic principle behind electromagnets. This is also the principle used to measure magnetic fields with a magnetometer. The direction of Earth’s magnetic fields affects the flow of electrons in the sensor, and those changes in current can be measured and calculated to derive a compass heading or other useful information.
DL2210Mk03
1 x SparkFun RedBoard Qwiic
1 x SparkFun Triple Axis Magnetometer Breakout – HMC5883L
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
DL2210Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #24 - RTOS - Magnetometer - Mk02
24-02
DL2210Mk03p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Triple Axis Magnetometer Breakout - HMC5883L
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// FreeRTOS
#include <Arduino_FreeRTOS.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// Define two tasks for Triple Axis Magnetometer
void isTaskMagnetometer( void *pvParameters );
// Software Version Information
String sver = "24-02";
void loop() {
// Empty. Things are done in Tasks.
}
getTasks.ino
// Tasks
// Setup Task
void isSetupTask(){
// Now set up one tasks to run independently
// Magnetometer
//xTaskCreatePinnedToCore(
xTaskCreate(
isTaskMagnetometer
, "Magnetometer"
, 128 // Stack size
, NULL
, 1 // Priority
, NULL);
// Now the task scheduler, which takes over control of scheduling individual tasks,
// is automatically started.
}
// This is a Task Magnetometer Serial
void isTaskMagnetometer(void *pvParameters)
{
(void) pvParameters;
// Triple Axis Magnetometer
HMC5883L compass;
// Magnetometer Serial
// Initialize HMC5883L
Serial.println("Initialize HMC5883L");
while (!compass.begin())
{
Serial.println("Could not find a valid HMC5883L sensor, check wiring!");
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
for (;;)
{
// Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
Serial.print("Xnorm = ");
Serial.print(norm.XAxis);
Serial.print(" Ynorm = ");
Serial.print(norm.YAxis);
Serial.print(" ZNorm = ");
Serial.print(norm.ZAxis);
Serial.println();
// One tick delay in between reads
vTaskDelay(500);
}
}
setup.ino
// Setup
void setup() {
// Initialize serial communication
// at 9600 bits per second:
Serial.begin(9600);
// Setup Task
isSetupTask();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
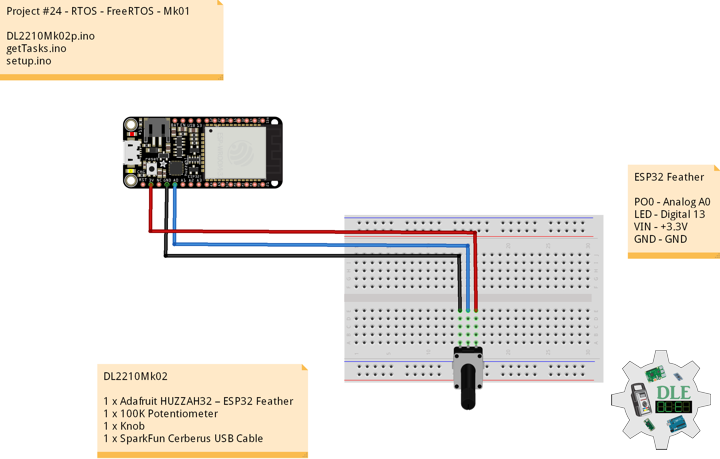
Project #24 – RTOS – FreeRTOS – Mk01
——
#DonLucElectronics #DonLuc #ESP32 #RTOS #FreeRTOS #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Real-Time Operating System
A real-time operating system (RTOS) is an operating system for real-time applications that processes data and events that have critically defined time constraints. A RTOS is distinct from a time-sharing operating system, such as Unix, which manages the sharing of system resources with a scheduler, data buffers, or fixed task prioritization in a multitasking or multiprogramming environment. Processing time requirements need to be fully understood and bound rather than just kept as a minimum. All processing must occur within the defined constraints. Real-time operating systems are event-driven and preemptive, meaning the OS is capable of monitoring the relevant priority of competing tasks, and make changes to the task priority. Event-driven systems switch between tasks based on their priorities, while time-sharing systems switch the task based on clock interrupts.
FreeRTOS
FreeRTOS is a real-time operating system kernel for embedded devices that has been ported to 35 microcontroller platforms. It is distributed under the MIT License. FreeRTOS is designed to be small and simple. It is mostly written in the C programming language to make it easy to port and maintain. It also comprises a few assembly language functions where needed, mostly in architecture-specific scheduler routines.
FreeRTOS is ideally suited to deeply embedded real-time applications that use microcontrollers or small microprocessors. This type of application normally includes a mix of both hard and soft real-time requirements. Soft real-time requirements are those that state a time deadline, but breaching the deadline would not render the system useless. For example, responding to keystrokes too slowly might make a system seem annoyingly unresponsive without actually making it unusable.
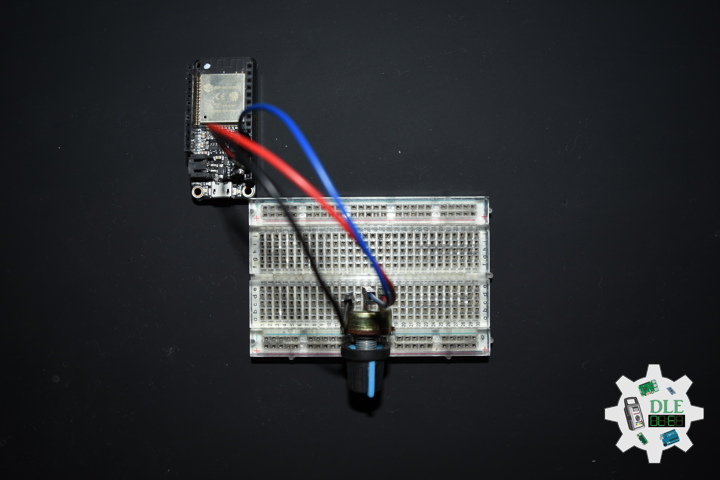
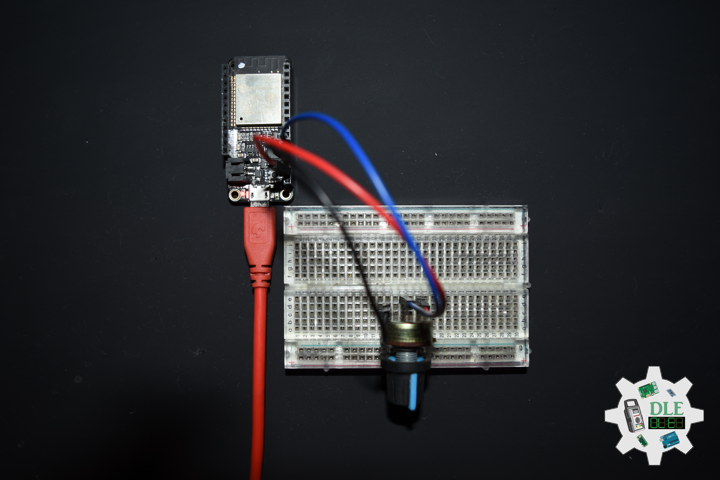
DL2210Mk02
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x 100K Potentiometer
1 x Knob
1 x SparkFun Cerberus USB Cable
ESP32 Feather
PO0 – Analog A0
LED – Digital 13
VIN – +3.3V
GND – GND
DL2210Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #24 - RTOS - FreeRTOS - Mk01
24-01
DL2210Mk02p.ino
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x 100K Potentiometer
1 x Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// FreeRTOS ESP32
#if CONFIG_FREERTOS_UNICORE
#define ARDUINO_RUNNING_CORE 0
#else
#define ARDUINO_RUNNING_CORE 1
#endif
// Led Built In
#ifndef LED_BUILTIN
#define LED_BUILTIN 13
#endif
// Define two tasks for Blink & AnalogRead
void isTaskBlink( void *pvParameters );
void isTaskAnalogReadA0( void *pvParameters );
// Software Version Information
String sver = "24-01";
void loop() {
// Empty
// Things are done in Tasks
}
getTasks.ino
// Tasks
// This is a Task Blink
void isTaskBlink(void *pvParameters)
{
(void) pvParameters;
// Blink
// Turns on an LED on for 2 second, then off for 2 second, repeatedly
// Initialize digital LED_BUILTIN on pin 13 as an output.
pinMode(LED_BUILTIN, OUTPUT);
// A Task shall never return or exit
for (;;)
{
// Turn the LED on (HIGH is the voltage level)
digitalWrite(LED_BUILTIN, HIGH);
// One tick delay in between reads
vTaskDelay(2000);
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// One tick delay in between reads
vTaskDelay(2000);
}
}
// This is a Task Analog Read Serial
void isTaskAnalogReadA0(void *pvParameters)
{
(void) pvParameters;
// Analog Read Serial
// Reads an analog input on pin A0, prints the result to the serial monitor
for (;;)
{
// Read the input on analog pin A0
int sensorValueA0 = analogRead(A0);
// Print out the value you read
Serial.print( "Pot A0: " );
Serial.println(sensorValueA0);
// One tick delay (15ms) in between reads for stability
vTaskDelay(100);
}
}
setup.ino
// Setup
void setup() {
// Initialize serial communication
// at 115200 bits per second
Serial.begin(115200);
// Now set up two tasks to run independently
// TaskBlink
xTaskCreatePinnedToCore(
isTaskBlink
, "TaskBlink" // A name just for humans
, 1024 // This stack size can be checked & adjusted by reading.
, NULL
, 2 // Priority, with 2 being the highest, and 0 being the lowest.
, NULL
, ARDUINO_RUNNING_CORE);
// AnalogReadA0
xTaskCreatePinnedToCore(
isTaskAnalogReadA0
, "AnalogReadA0"
, 1024 // Stack size
, NULL
, 1 // Priority
, NULL
, ARDUINO_RUNNING_CORE);
// Now the task scheduler, which takes over control of scheduling individual tasks,
// is automatically started.
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
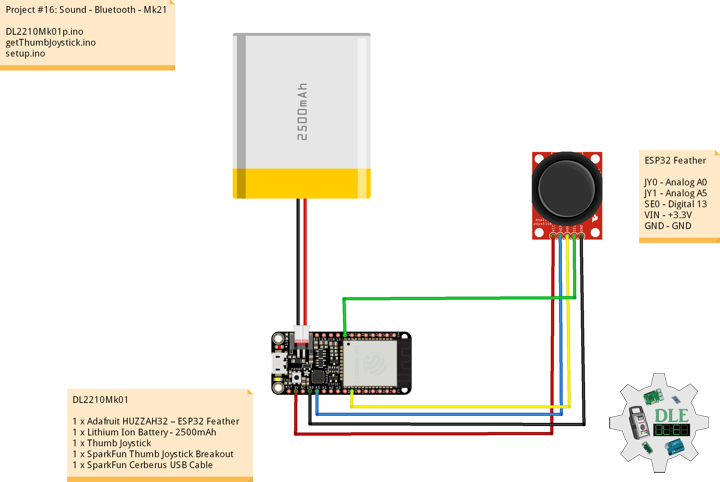
Project #16: Sound – Bluetooth – Mk21
——
#DonLucElectronics #DonLuc #ESP32 #Bluetooth #ThumbJoystick #Keyboard #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
Bluetooth
Bluetooth is a short-range wireless technology standard that is used for exchanging data between fixed and mobile devices over short distances and building personal area networks. It employs UHF radio waves in the ISM bands, from 2.402 GHz to 2.48 GHz. It is mainly used as an alternative to wire connections, to exchange files between nearby portable devices, computer and connect cell phones and music players with wireless headphones. In the most widely used mode, transmission power is limited to 2.5 milliwatts, giving it a very short range of up to 10 metres.
DL2210Mk01
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x SparkFun Cerberus USB Cable
ESP32 Feather
JY0 – Analog A0
JY1 – Analog A5
SE0 – Digital 13
VIN – +3.3V
GND – GND
——
DL2210Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #16: Sound - Bluetooth - Mk21
16-21
DL2210Mk01p.ino
1 x Adafruit HUZZAH32 – ESP32 Feather
1 x Lithium Ion Battery - 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// ESP32 BLE Keyboard
#include <BleKeyboard.h>
// ESP32 BLE Keyboard
BleKeyboard bleKeyboard;
// Connections to joystick
// Vertical
const int VERT = A0;
// Horizontal
const int HORIZ = A5;
// Pushbutton
const int SEL = 13;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int selec;
// Software Version Information
String sver = "16-21";
void loop() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Thumb Joystick
isThumbJoystick();
}
// Delay
delay( 1000 );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 2047 for the vertical and horizontal values
// Will be 0-4095
// Vertical
vertical = analogRead(VERT);
if (vertical == 4095) {
// Volume Up
bleKeyboard.write(KEY_MEDIA_VOLUME_UP);
} else if (vertical == 0) {
// Volume Down
bleKeyboard.write(KEY_MEDIA_VOLUME_DOWN);
}
// Horizontal
// Will be 0-4095
horizontal = analogRead(HORIZ);
if (horizontal == 4095) {
// Previous Track
bleKeyboard.write(KEY_MEDIA_PREVIOUS_TRACK);
} else if (horizontal == 0) {
// Next Track
bleKeyboard.write(KEY_MEDIA_NEXT_TRACK);
}
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
selec = digitalRead(SEL);
if (selec == 0) {
// Play/Pause media key
bleKeyboard.write(KEY_MEDIA_PLAY_PAUSE);
}
}
setup.ino
// Setup
void setup() {
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// ESP32 BLE Keyboard
bleKeyboard.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
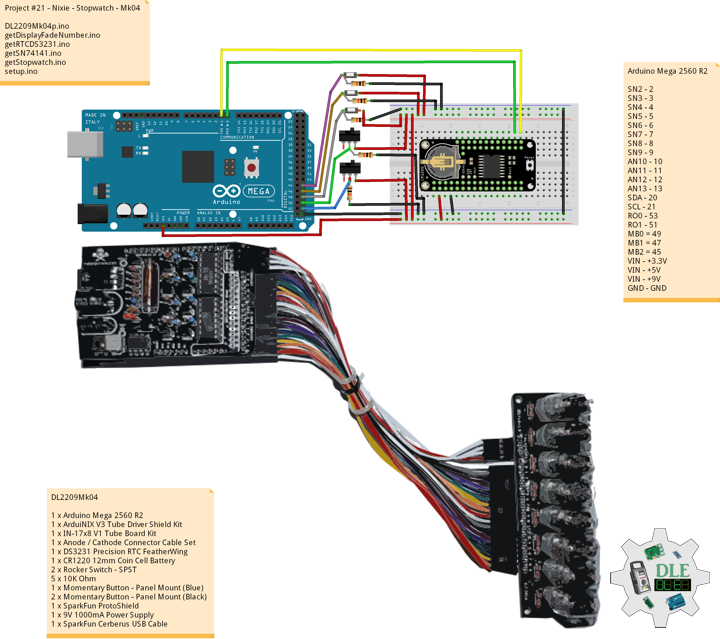
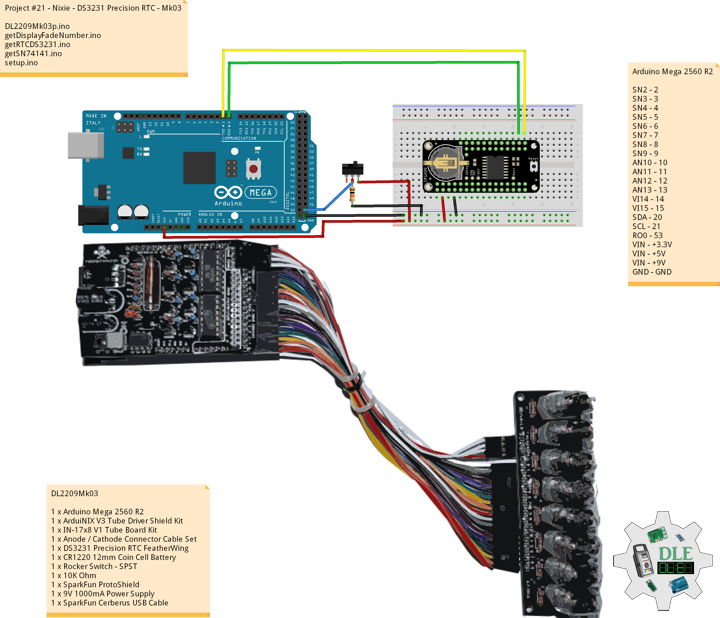
Project #21 – Nixie – Stopwatch – Mk04
——
#DonLucElectronics #DonLuc #NixieTube #Nixie #ArduiNIX #ArduinoMega2560 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
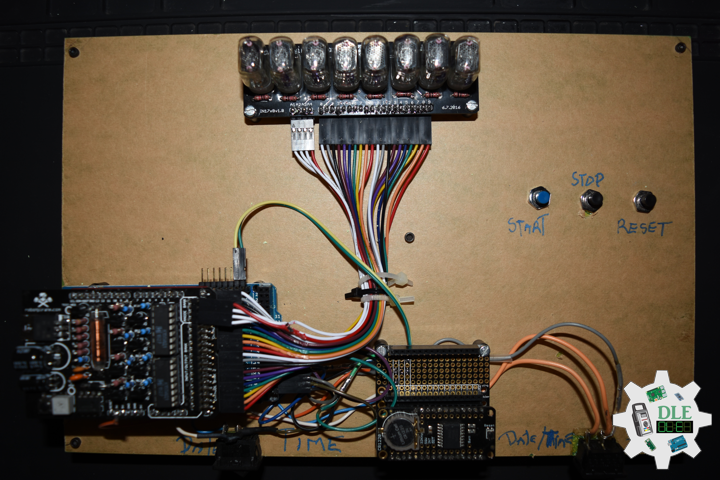
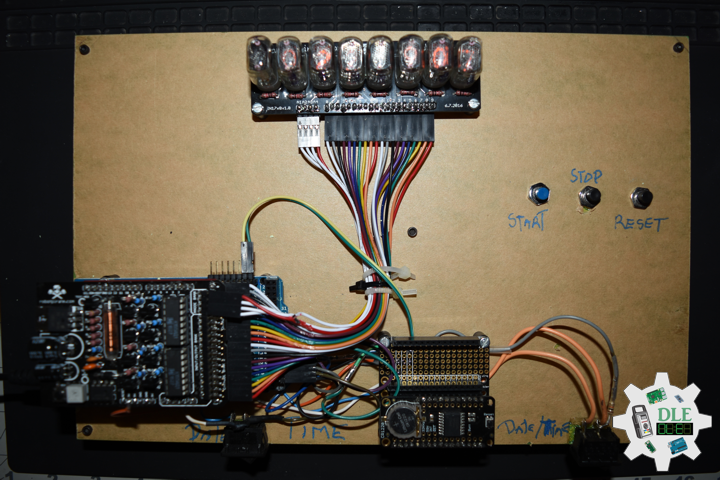
Stopwatch
A stopwatch is a timepiece designed to measure the amount of time that elapses between its activation and deactivation. In manual timing, the clock is started and stopped by a person pressing a button. The timing functions are traditionally controlled by two buttons on the case. Pressing the top button starts the timer running, and pressing the button a second time stops it, leaving the elapsed time displayed. A press of the second button then resets the stopwatch to zero. The second button is also used to record split times or lap times. When the split time button is pressed while the watch is running it allows the elapsed time to that point to be read, but the watch mechanism continues running to record total elapsed time. Pressing the split button a second time allows the watch to resume display of total time.
DL2209Mk04
1 x Arduino Mega 2560 R2
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17×8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 12mm Coin Cell Battery
2 x Rocker Switch – SPST
5 x 10K Ohm
1 x Momentary Button – Panel Mount (Blue)
2 x Momentary Button – Panel Mount (Black)
1 x SparkFun ProtoShield
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
Arduino Mega 2560 R2
SN2 – 2
SN3 – 3
SN4 – 4
SN5 – 5
SN6 – 6
SN7 – 7
SN8 – 8
SN9 – 9
AN10 – 10
AN11 – 11
AN12 – 12
AN13 – 13
SDA – 20
SCL – 21
RO0 – 53
RO1 – 51
MB0 = 49
MB1 = 47
MB2 = 45
VIN – +3.3V
VIN – +5V
VIN – +9V
GND – GND
DL2209Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #21 - Nixie - Stopwatch - Mk04
21-04
DL2209Mk04p.ino
1 x Arduino Mega 2560 R2
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17x8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 12mm Coin Cell Battery
2 x Rocker Switch - SPST
5 x 10K Ohm
1 x Momentary Button - Panel Mount (Blue)
2 x Momentary Button - Panel Mount (Black)
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire you to communicate with I2C/TWI devices
// Date and Time DS3231 RTC
#include "RTClib.h"
// SN74141 (1)
int ledPin_0_a = 2;
int ledPin_0_b = 3;
int ledPin_0_c = 4;
int ledPin_0_d = 5;
// SN74141 (2)
int ledPin_1_a = 6;
int ledPin_1_b = 7;
int ledPin_1_c = 8;
int ledPin_1_d = 9;
// Anode pins
int ledPin_a_1 = 10;
int ledPin_a_2 = 11;
int ledPin_a_3 = 12;
int ledPin_a_4 = 13;
// Fade
float fadeMax = 0.1f;
float fadeStep = 0.1f;
// Number Array
int NumberArray[8]={0,0,0,0,0,0,0,0};
int currNumberArray[8]={0,0,0,0,0,0,0,0};
float NumberArrayFadeInValue[8]={0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f};
float NumberArrayFadeOutValue[8]={5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f};
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
// Rocker Switch - SPST
// Rocker Switch 0
const int iRO0 = 53;
// State
int iRO0State = 0;
// Rocker Switch 1
const int iRO1 = 51;
// State
int iRO1State = 0;
// Momentary Button
const int iStartP = 49;
const int iStopP = 47;
const int iResetP = 45;
// Setting hours, minutes, secound and miliseconds to 0
int iH = 0;
int iM = 0;
int iS = 0;
int iMS = 0;
int iMSS = 0;
// Defines starting points
int iStart = 0;
int iStop1 = 0;
int iReset = 0;
// Get the high and low order values for hours,min,seconds.
int lowerHours = 0;
int upperHours = 0;
int lowerMins = 0;
int upperMins = 0;
int lowerSeconds = 0;
int upperSeconds = 0;
int lowerMiliseconds = 0;
int upperMiliseconds = 0;
// Software Version Information
String sver = "21-04";
void loop() {
// Read the state of the Switch value
iRO1State = digitalRead(iRO1);
// If it is the Switch State is HIGH
if (iRO1State == HIGH) {
// Stopwatch
isStart();
} else {
// Date ans Time
isTimeRTC();
}
}
getDisplayFadeNumber.ino
// Display Fade Number
void DisplayFadeNumberString()
{
// Anode channel 1 - numerals 0,4
SetSN74141Chips(currNumberArray[0],currNumberArray[4]);
digitalWrite(ledPin_a_1, HIGH);
delay(NumberArrayFadeOutValue[0]);
SetSN74141Chips(NumberArray[0],NumberArray[4]);
delay(NumberArrayFadeInValue[0]);
digitalWrite(ledPin_a_1, LOW);
// Anode channel 2 - numerals 1,5
SetSN74141Chips(currNumberArray[1],currNumberArray[5]);
digitalWrite(ledPin_a_2, HIGH);
delay(NumberArrayFadeOutValue[1]);
SetSN74141Chips(NumberArray[1],NumberArray[5]);
delay(NumberArrayFadeInValue[1]);
digitalWrite(ledPin_a_2, LOW);
// Anode channel 3 - numerals 2,6
SetSN74141Chips(currNumberArray[2],currNumberArray[6]);
digitalWrite(ledPin_a_3, HIGH);
delay(NumberArrayFadeOutValue[2]);
SetSN74141Chips(NumberArray[2],NumberArray[6]);
delay(NumberArrayFadeInValue[2]);
digitalWrite(ledPin_a_3, LOW);
// Anode channel 4 - numerals 3,7
SetSN74141Chips(currNumberArray[3],currNumberArray[7]);
digitalWrite(ledPin_a_4, HIGH);
delay(NumberArrayFadeOutValue[3]);
SetSN74141Chips(NumberArray[3],NumberArray[7]);
delay(NumberArrayFadeInValue[3]);
digitalWrite(ledPin_a_4, LOW);
// Loop thru and update all the arrays, and fades.
for( int i = 0 ; i < 8 ; i ++ ) //equal to & of digits
{
if( NumberArray[i] != currNumberArray[i] )
{
NumberArrayFadeInValue[i] += fadeStep;
NumberArrayFadeOutValue[i] -= fadeStep;
if( NumberArrayFadeInValue[i] >= fadeMax )
{
NumberArrayFadeInValue[i] = 2.0f;
NumberArrayFadeOutValue[i] = 4.0f; //affects the refresh cycle
currNumberArray[i] = NumberArray[i];
}
}
}
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin() ) {
while (1) delay(10);
}
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2022, 4, 26, 11, 39, 0));
}
}
// Date ans Time - isTimeRTC
void isTimeRTC() {
// Date and Time
DateTime now = RTC.now();
// Read the state of the Switch value
iRO0State = digitalRead(iRO0);
// If it is the Switch State is HIGH
if (iRO0State == HIGH) {
// Get the high and low order values for hours, minute, seconds
int lowerHours = now.hour() % 10;
int upperHours = now.hour() - lowerHours;
int lowerMins = now.minute() % 10;
int upperMins = now.minute() - lowerMins;
int lowerSeconds = now.second() % 10;
int upperSeconds = now.second() - lowerSeconds;
// 10 >= hours, minute, seconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
if( upperHours == 0 && lowerHours == 0 )
{
upperHours = 1;
lowerHours = 2;
}
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = 0;
NumberArray[4] = upperMins;
NumberArray[3] = lowerMins;
NumberArray[2] = 0;
NumberArray[1] = upperSeconds;
NumberArray[0] = lowerSeconds;
} else {
// Get the high and low order values for year, month, day
int iYear = now.year() - 2000;
int lowerYear = iYear % 10;
int upperYear = iYear - lowerYear;
int lowerMonth = now.month() % 10;
int upperMonth = now.month() - lowerMonth;
int lowerDay = now.day() % 10;
int upperDay = now.day() - lowerDay;
// 10 >= year, month, day
if( upperDay >= 10 ) upperDay = upperDay / 10;
if( upperMonth >= 10 ) upperMonth = upperMonth / 10;
if( upperYear >= 10 ) upperYear = upperYear / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = 2;
NumberArray[6] = 0;
NumberArray[5] = upperYear;
NumberArray[4] = lowerYear;
NumberArray[3] = upperMonth;
NumberArray[2] = lowerMonth;
NumberArray[1] = upperDay;
NumberArray[0] = lowerDay;
}
// Display
DisplayFadeNumberString();
}
getSN74141.ino
// SN74141
// SN74141 : Truth Table
//D C B A #
//L,L,L,L 0
//L,L,L,H 1
//L,L,H,L 2
//L,L,H,H 3
//L,H,L,L 4
//L,H,L,H 5
//L,H,H,L 6
//L,H,H,H 7
//H,L,L,L 8
//H,L,L,H 9
// isSetupSN74141
void isSetupSN74141(){
pinMode(ledPin_0_a, OUTPUT);
pinMode(ledPin_0_b, OUTPUT);
pinMode(ledPin_0_c, OUTPUT);
pinMode(ledPin_0_d, OUTPUT);
pinMode(ledPin_1_a, OUTPUT);
pinMode(ledPin_1_b, OUTPUT);
pinMode(ledPin_1_c, OUTPUT);
pinMode(ledPin_1_d, OUTPUT);
pinMode(ledPin_a_1, OUTPUT);
pinMode(ledPin_a_2, OUTPUT);
pinMode(ledPin_a_3, OUTPUT);
pinMode(ledPin_a_4, OUTPUT);
}
// SetSN74141Chips
void SetSN74141Chips( int num2, int num1 )
{
// Set defaults
// Will display a zero.
int a = 0;
int b = 0;
int c = 0;
int d = 0;
// Load the a,b,c,d.. to send to the SN74141 IC (1)
switch( num1 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins.
digitalWrite(ledPin_0_d, d);
digitalWrite(ledPin_0_c, c);
digitalWrite(ledPin_0_b, b);
digitalWrite(ledPin_0_a, a);
// Load the a,b,c,d.. to send to the SN74141 IC (2)
switch( num2 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins
digitalWrite(ledPin_1_d, d);
digitalWrite(ledPin_1_c, c);
digitalWrite(ledPin_1_b, b);
digitalWrite(ledPin_1_a, a);
}
getStopwatch.ino
// Stopwatch
// Setup Stopwatch
void isSetupStopwatch(){
// Switch
pinMode(iRO0, INPUT);
pinMode(iRO1, INPUT);
// Momentary Button
pinMode(iStartP, INPUT);
pinMode(iStopP, INPUT);
pinMode(iResetP, INPUT);
}
// Start
void isStart()
{
// Reading buton state iStart
iStart = digitalRead(iStartP);
if(iStart == HIGH)
{
// Calls the isStopWatch function
isStopWatch();
}
}
// Stop Watch
void isStopWatch()
{
// Miliseconds
iMS = iMS + 10;
if(iMS == 600)
{
iMS = 0;
iMSS = 0;
iS = iS + 1;
} else if (iMS == 60) { // 1
iMSS = iMSS + 1;
} else if (iMS == 120) { // 2
iMSS = iMSS + 1;
} else if (iMS == 180) { //3
iMSS = iMSS + 1;
} else if (iMS == 240) { // 4
iMSS = iMSS + 1;
} else if (iMS == 300) { // 5
iMSS = iMSS + 1;
} else if (iMS == 360) { // 6
iMSS = iMSS + 1;
} else if (iMS == 420) { // 7
iMSS = iMSS + 1;
} else if (iMS == 480) { // 8
iMSS = iMSS + 1;
} else if (iMS == 540) { // 9
iMSS = iMSS + 1;
}
// If state for counting up minutes
if( iS == 60)
{
iS = 0;
iM = iM + 1;
}
// If state for counting up hours
if( iM == 60)
{
iM = 0;
iH = iH + 01;
}
// Get the high and low order values for hours, minute, seconds, Miliseconds
int lowerHours = iH % 10;
int upperHours = iH - lowerHours;
int lowerMins = iM % 10;
int upperMins = iM - lowerMins;
int lowerSeconds = iS % 10;
int upperSeconds = iS - lowerSeconds;
int lowerMiliseconds = iMSS;
int upperMiliseconds = iMSS - lowerMiliseconds;
// 10 >= hours, minute, seconds, Miliseconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = upperMins;
NumberArray[4] = lowerMins;
NumberArray[3] = upperSeconds;
NumberArray[2] = lowerSeconds;
NumberArray[1] = lowerMiliseconds;
NumberArray[0] = lowerMiliseconds;
// Display
DisplayFadeNumberString();
// Reading buton state Stop
iStop1 = digitalRead(iStopP);
// Checking if button is pressed
if(iStop1 == HIGH)
{
// Calls the isStopwatchStop function
isStopwatchStop();
}
else
{
// Calls the isStopWatch function
isStopWatch();
}
}
// Stopwatch Stop
void isStopwatchStop()
{
// Get the high and low order values for hours, minute, seconds, Miliseconds
int lowerHours = iH % 10;
int upperHours = iH - lowerHours;
int lowerMins = iM % 10;
int upperMins = iM - lowerMins;
int lowerSeconds = iS % 10;
int upperSeconds = iS - lowerSeconds;
int lowerMiliseconds = iMSS;
int upperMiliseconds = iMSS - lowerMiliseconds;
// 10 >= hours, minute, seconds, Miliseconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = upperMins;
NumberArray[4] = lowerMins;
NumberArray[3] = upperSeconds;
NumberArray[2] = lowerSeconds;
NumberArray[1] = lowerMiliseconds;
NumberArray[0] = lowerMiliseconds;
// Display
DisplayFadeNumberString();
// Reading buton state iStart
iStart = digitalRead(iStartP);
if(iStart == HIGH)
{
// Calls the isStopWatch function
isStopWatch();
}
// Reading buton state
iReset = digitalRead(iResetP);
if(iReset == HIGH)
{
// Calls the isStopwatchReset function
isStopwatchReset();
loop();
}
if(iReset == LOW)
{
// Calls the isStopwatchStop function
isStopwatchStop();
}
}
// Stopwatch Reset
void isStopwatchReset()
{
// Seting hours to 0
iH = 0;
// Seting minutes to 0
iM = 0;
// Seting seconds to 0
iS = 0;
// Seting miliseconds to 0
iMS = 0;
// Seting miliseconds to 0
iMSS = 0;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = 0;
NumberArray[6] = 0;
NumberArray[5] = 0;
NumberArray[4] = 0;
NumberArray[3] = 0;
NumberArray[2] = 0;
NumberArray[1] = 0;
NumberArray[0] = 0;
// Display
DisplayFadeNumberString();
// Exiting the program and returning to the point where entered the program
return;
}
setup.ino
// Setup
void setup() {
// isSetupSN74141
isSetupSN74141();
// Setup Stopwatch
isSetupStopwatch();
// Setup RTC
setupRTC();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
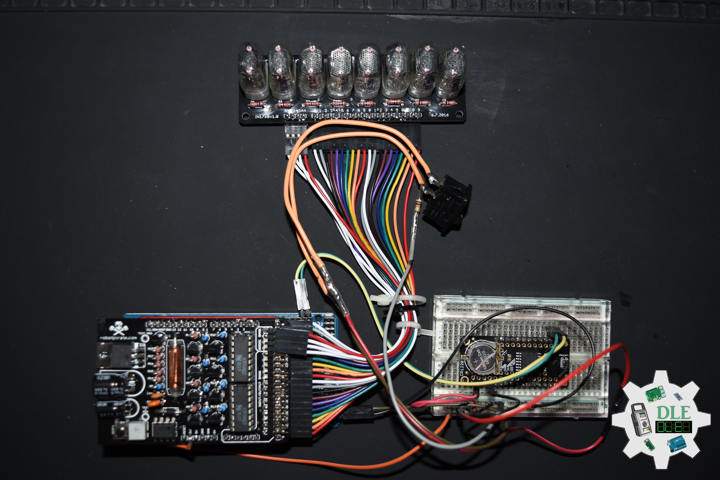
Project #21 – Nixie – DS3231 Precision RTC – Mk03
——
#DonLucElectronics #DonLuc #NixieTube #Nixie #ArduiNIX #ArduinoUNO #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
DS3231 Precision RTC FeatherWing
The datasheet for the DS3231 explains that this part is an extremely accurate I²C – Integrated RTC TCXO – crystal. This Real Time Clock (RTC) is the most precise you can get in a small, low power package. Most RTC’s use an external 32kHz timing crystal that is used to keep time with low current draw. That’s all well and good, but those crystals have slight drift, particularly when the temperature changes, the temperature changes the oscillation frequency very slightly but it does add up. This RTC is in a beefy package because the crystal is inside the chip. And right next to the integrated crystal is a temperature sensor. That sensor compensates for the frequency changes by adding or removing clock ticks so that the time keeping stays on schedule.
This is the finest RTC you can get, and now we have it in a compact, breadboard friendly breakout. With a coin cell plugged into the back, you can get years of precision time keeping, even when main power is lost. Great for datalogging and clocks, or anything where you need to really know the time.
DL2209Mk03
1 x Arduino Mega 2560 R2
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17×8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 12mm Coin Cell Battery
1 x Rocker Switch – SPST
1 x 10K Ohm
1 x SparkFun ProtoShield
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
Arduino Mega 2560 R2
SN2 – 2
SN3 – 3
SN4 – 4
SN5 – 5
SN6 – 6
SN7 – 7
SN8 – 8
SN9 – 9
AN10 – 10
AN11 – 11
AN12 – 12
AN13 – 13
VI14 – 14
VI15 – 15
SDA – 20
SCL – 21
RO0 – 53
VIN – +3.3V
VIN – +5V
VIN – +9V
GND – GND
DL2209Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #21 - Nixie - DS3231 Precision RTC - Mk03
21-03
DL2209Mk03p.ino
1 x Arduino Mega 2560 R2
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17x8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 12mm Coin Cell Battery
1 x Rocker Switch - SPST
1 x 10K Ohm
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire you to communicate with I2C/TWI devices
// Date and Time DS3231 RTC
#include "RTClib.h"
// SN74141 (1)
int ledPin_0_a = 2;
int ledPin_0_b = 3;
int ledPin_0_c = 4;
int ledPin_0_d = 5;
// SN74141 (2)
int ledPin_1_a = 6;
int ledPin_1_b = 7;
int ledPin_1_c = 8;
int ledPin_1_d = 9;
// Anode pins
int ledPin_a_1 = 10;
int ledPin_a_2 = 11;
int ledPin_a_3 = 12;
int ledPin_a_4 = 13;
// NOTE: Grounding on virtual pins 14 and 15
// (analog pins 0 and 1) will set the Hour and Mins.
int iVirtual14 = 14;
int iVirtual15 = 15;
// Fade
float fadeMax = 0.1f;
float fadeStep = 0.1f;
// Number Array
int NumberArray[8]={0,0,0,0,0,0,0,0};
int currNumberArray[8]={0,0,0,0,0,0,0,0};
float NumberArrayFadeInValue[8]={0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f};
float NumberArrayFadeOutValue[8]={5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f};
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
// Rocker Switch - SPST
int iRO0 = 53;
// State
int iRO0State = 0;
// Software Version Information
String sver = "21-03";
void loop() {
// timeRTC
timeRTC();
}
getDisplayFadeNumber.ino
// Display Fade Number
void DisplayFadeNumberString()
{
// Anode channel 1 - numerals 0,4
SetSN74141Chips(currNumberArray[0],currNumberArray[4]);
digitalWrite(ledPin_a_1, HIGH);
delay(NumberArrayFadeOutValue[0]);
SetSN74141Chips(NumberArray[0],NumberArray[4]);
delay(NumberArrayFadeInValue[0]);
digitalWrite(ledPin_a_1, LOW);
// Anode channel 2 - numerals 1,5
SetSN74141Chips(currNumberArray[1],currNumberArray[5]);
digitalWrite(ledPin_a_2, HIGH);
delay(NumberArrayFadeOutValue[1]);
SetSN74141Chips(NumberArray[1],NumberArray[5]);
delay(NumberArrayFadeInValue[1]);
digitalWrite(ledPin_a_2, LOW);
// Anode channel 3 - numerals 2,6
SetSN74141Chips(currNumberArray[2],currNumberArray[6]);
digitalWrite(ledPin_a_3, HIGH);
delay(NumberArrayFadeOutValue[2]);
SetSN74141Chips(NumberArray[2],NumberArray[6]);
delay(NumberArrayFadeInValue[2]);
digitalWrite(ledPin_a_3, LOW);
// Anode channel 4 - numerals 3,7
SetSN74141Chips(currNumberArray[3],currNumberArray[7]);
digitalWrite(ledPin_a_4, HIGH);
delay(NumberArrayFadeOutValue[3]);
SetSN74141Chips(NumberArray[3],NumberArray[7]);
delay(NumberArrayFadeInValue[3]);
digitalWrite(ledPin_a_4, LOW);
// Loop thru and update all the arrays, and fades.
for( int i = 0 ; i < 8 ; i ++ ) //equal to & of digits
{
if( NumberArray[i] != currNumberArray[i] )
{
NumberArrayFadeInValue[i] += fadeStep;
NumberArrayFadeOutValue[i] -= fadeStep;
if( NumberArrayFadeInValue[i] >= fadeMax )
{
NumberArrayFadeInValue[i] = 2.0f;
NumberArrayFadeOutValue[i] = 4.0f; //affects the refresh cycle
currNumberArray[i] = NumberArray[i];
}
}
}
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin() ) {
while (1) delay(10);
}
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2022, 4, 26, 11, 39, 0));
}
}
// timeRTC
void timeRTC() {
// Date and Time
DateTime now = RTC.now();
// Read the state of the Switch value
iRO0State = digitalRead(iRO0);
// If it is the Switch State is HIGH
if (iRO0State == HIGH) {
// Get the high and low order values for hours, minute, seconds
int lowerHours = now.hour() % 10;
int upperHours = now.hour() - lowerHours;
int lowerMins = now.minute() % 10;
int upperMins = now.minute() - lowerMins;
int lowerSeconds = now.second() % 10;
int upperSeconds = now.second() - lowerSeconds;
// 10 >= hours, minute, seconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
if( upperHours == 0 && lowerHours == 0 )
{
upperHours = 1;
lowerHours = 2;
}
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = 0;
NumberArray[4] = upperMins;
NumberArray[3] = lowerMins;
NumberArray[2] = 0;
NumberArray[1] = upperSeconds;
NumberArray[0] = lowerSeconds;
} else {
// Get the high and low order values for year, month, day
int iYear = now.year() - 2000;
int lowerYear = iYear % 10;
int upperYear = iYear - lowerYear;
int lowerMonth = now.month() % 10;
int upperMonth = now.month() - lowerMonth;
int lowerDay = now.day() % 10;
int upperDay = now.day() - lowerDay;
// 10 >= year, month, day
if( upperDay >= 10 ) upperDay = upperDay / 10;
if( upperMonth >= 10 ) upperMonth = upperMonth / 10;
if( upperYear >= 10 ) upperYear = upperYear / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = 2;
NumberArray[6] = 0;
NumberArray[5] = upperYear;
NumberArray[4] = lowerYear;
NumberArray[3] = upperMonth;
NumberArray[2] = lowerMonth;
NumberArray[1] = upperDay;
NumberArray[0] = lowerDay;
}
// Display
DisplayFadeNumberString();
}
getSN74141.ino
// SN74141
// SN74141 : Truth Table
//D C B A #
//L,L,L,L 0
//L,L,L,H 1
//L,L,H,L 2
//L,L,H,H 3
//L,H,L,L 4
//L,H,L,H 5
//L,H,H,L 6
//L,H,H,H 7
//H,L,L,L 8
//H,L,L,H 9
// isSetupSN74141
void isSetupSN74141(){
pinMode(ledPin_0_a, OUTPUT);
pinMode(ledPin_0_b, OUTPUT);
pinMode(ledPin_0_c, OUTPUT);
pinMode(ledPin_0_d, OUTPUT);
pinMode(ledPin_1_a, OUTPUT);
pinMode(ledPin_1_b, OUTPUT);
pinMode(ledPin_1_c, OUTPUT);
pinMode(ledPin_1_d, OUTPUT);
pinMode(ledPin_a_1, OUTPUT);
pinMode(ledPin_a_2, OUTPUT);
pinMode(ledPin_a_3, OUTPUT);
pinMode(ledPin_a_4, OUTPUT);
// NOTE: Grounding on virtual pins 14 and 15
// (analog pins 0 and 1) will set the Hour and Mins.
// Set the vertual pin 14 (pin 0 on the analog inputs )
pinMode( iVirtual14, INPUT );
// Set pin 14 as a pull up resistor.
digitalWrite(iVirtual14, HIGH);
// Set the vertual pin 15 (pin 1 on the analog inputs )
pinMode( iVirtual15, INPUT );
// Set pin 15 as a pull up resistor.
digitalWrite(iVirtual15, HIGH);
}
// SetSN74141Chips
void SetSN74141Chips( int num2, int num1 )
{
// Set defaults
// Will display a zero.
int a = 0;
int b = 0;
int c = 0;
int d = 0;
// Load the a,b,c,d.. to send to the SN74141 IC (1)
switch( num1 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins.
digitalWrite(ledPin_0_d, d);
digitalWrite(ledPin_0_c, c);
digitalWrite(ledPin_0_b, b);
digitalWrite(ledPin_0_a, a);
// Load the a,b,c,d.. to send to the SN74141 IC (2)
switch( num2 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins
digitalWrite(ledPin_1_d, d);
digitalWrite(ledPin_1_c, c);
digitalWrite(ledPin_1_b, b);
digitalWrite(ledPin_1_a, a);
}
setup.ino
// Setup
void setup() {
// isSetupSN74141
isSetupSN74141();
// Switch
pinMode(iRO0, INPUT);
// Setup RTC
setupRTC();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
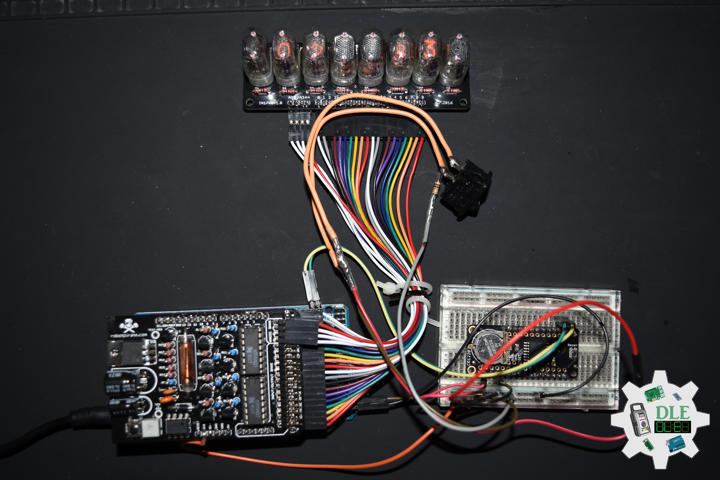
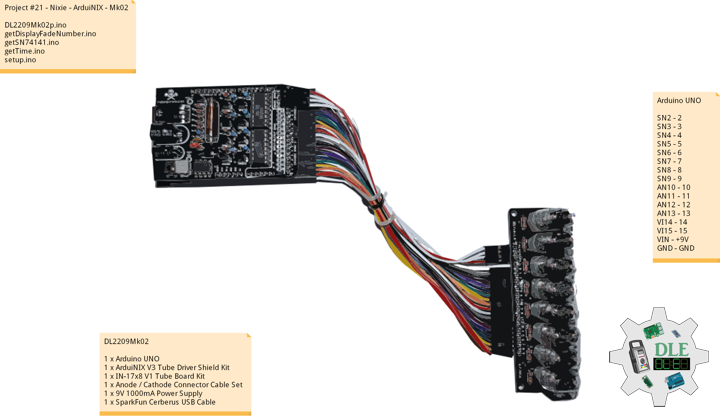
Project #21 – Nixie – ArduiNIX – Mk02
——
#DonLucElectronics #DonLuc #NixieTube #Nixie #ArduiNIX #ArduinoUNO #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
——
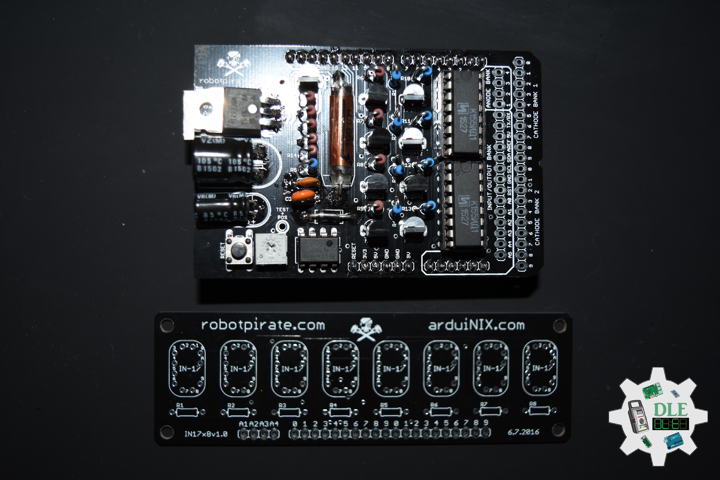
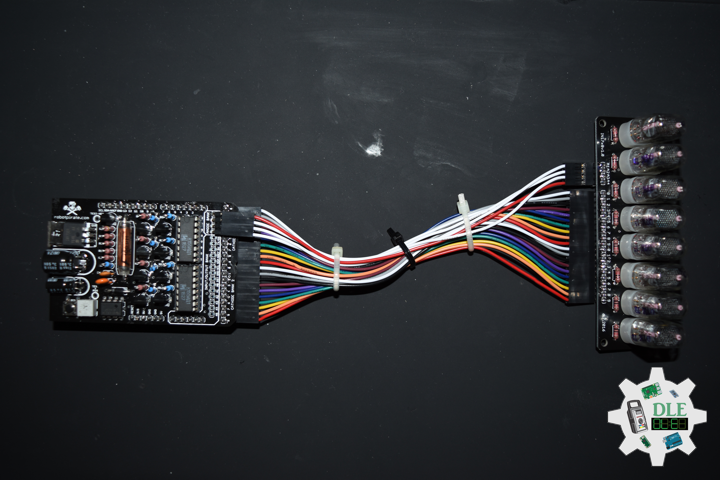
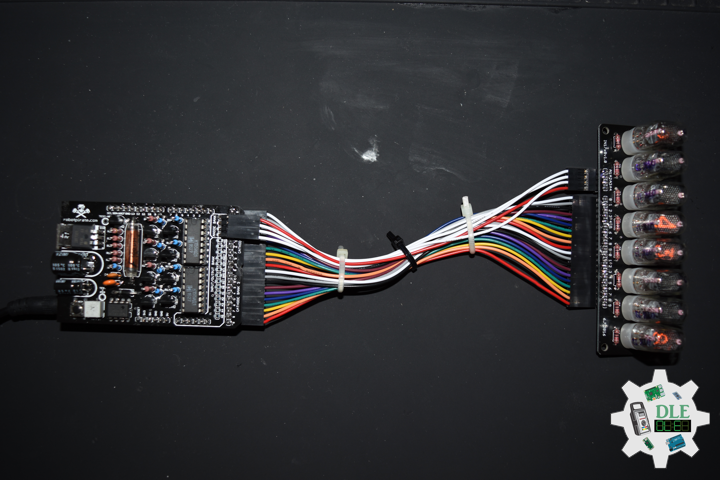
ArduiNIX
The ArduiNIX is an Arduino compatible shield which plugs right onto the top of the Arduino UNO board. ArduiNIX takes care of stepping power from 9 VDC wall adapter power supply up to a maximum of approximately 250 VDC to drive any and all Nixie tubes. ArduiNIX also provides Multiplexed display for up to 80 elements by using 4 anode channels and 20 cathode channels. Multiplexing increases the life expectancy of your Nixie tube investment.
Not only does the ArduiNIX provide a Nixie tube platform for standard clock functions, but it is also user programmable, meaning if you can program it using the arduino environment, you can make it happen on your Nixie display. Take special care when working with the ArduiNIX. The ArduiNIX Shield operates at high voltages. Be careful when handling it while it’s powered up. Normally the Arduino is safe to handle, but when used in conjunction with the ArduiNIX, voltages in excess of 200 volts may be achieved. Use caution. An IN-17 x 8 display board, and 8 x Russian IN-17 Nixie tubes.
DL2209Mk02
1 x Arduino UNO
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17×8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
Arduino UNO
SN2 – 2
SN3 – 3
SN4 – 4
SN5 – 5
SN6 – 6
SN7 – 7
SN8 – 8
SN9 – 9
AN10 – 10
AN11 – 11
AN12 – 12
AN13 – 13
VI14 – 14
VI15 – 15
VIN – +9V
GND – GND
DL2209Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #21 - Nixie - ArduiNIX - Mk02
21-02
DL2209Mk02p.ino
1 x Arduino UNO
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17x8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// SN74141 (1)
int ledPin_0_a = 2;
int ledPin_0_b = 3;
int ledPin_0_c = 4;
int ledPin_0_d = 5;
// SN74141 (2)
int ledPin_1_a = 6;
int ledPin_1_b = 7;
int ledPin_1_c = 8;
int ledPin_1_d = 9;
// Anode pins
int ledPin_a_1 = 10;
int ledPin_a_2 = 11;
int ledPin_a_3 = 12;
int ledPin_a_4 = 13;
// NOTE: Grounding on virtual pins 14 and 15
// (analog pins 0 and 1) will set the Hour and Mins.
int iVirtual14 = 14;
int iVirtual15 = 15;
// Fade
float fadeMax = 0.1f;
float fadeStep = 0.1f;
// Number Array
int NumberArray[8]={0,0,0,0,0,0,0,0};
int currNumberArray[8]={0,0,0,0,0,0,0,0};
float NumberArrayFadeInValue[8]={0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f};
float NumberArrayFadeOutValue[8]={5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f};
// Defines
// Sub seconds
long SSECS = 100;
// Milliseconds in a Sec
long SECS = 60;
// 60 Seconds in a Min.
long MINS = 60;
// 60 Mins in an hour
long HOURS = 60 * MINS;
// 24 Hours in a day. > Note: change the 24 to a 12 for non military time.
long DAYS = 12 * HOURS;
// Time from when we started
long runTime = 0;
// Default time sets. clock will start at 12:34:00.
// This is so we can count the correct order of tubes.
long clockHourSet;
long clockMinSet;
long clockSecSet;
//long clockSSecSet;
int HourButtonPressed = false;
int MinButtonPressed = false;
// Software Version Information
String sver = "21-02";
void loop() {
// Time
isTime();
}
getDisplayFadeNumber.ino
// Display Fade Number
void DisplayFadeNumberString()
{
// Anode channel 1 - numerals 0,4
SetSN74141Chips(currNumberArray[0],currNumberArray[4]);
digitalWrite(ledPin_a_1, HIGH);
delay(NumberArrayFadeOutValue[0]);
SetSN74141Chips(NumberArray[0],NumberArray[4]);
delay(NumberArrayFadeInValue[0]);
digitalWrite(ledPin_a_1, LOW);
// Anode channel 2 - numerals 1,5
SetSN74141Chips(currNumberArray[1],currNumberArray[5]);
digitalWrite(ledPin_a_2, HIGH);
delay(NumberArrayFadeOutValue[1]);
SetSN74141Chips(NumberArray[1],NumberArray[5]);
delay(NumberArrayFadeInValue[1]);
digitalWrite(ledPin_a_2, LOW);
// Anode channel 3 - numerals 2,6
SetSN74141Chips(currNumberArray[2],currNumberArray[6]);
digitalWrite(ledPin_a_3, HIGH);
delay(NumberArrayFadeOutValue[2]);
SetSN74141Chips(NumberArray[2],NumberArray[6]);
delay(NumberArrayFadeInValue[2]);
digitalWrite(ledPin_a_3, LOW);
// Anode channel 4 - numerals 3,7
SetSN74141Chips(currNumberArray[3],currNumberArray[7]);
digitalWrite(ledPin_a_4, HIGH);
delay(NumberArrayFadeOutValue[3]);
SetSN74141Chips(NumberArray[3],NumberArray[7]);
delay(NumberArrayFadeInValue[3]);
digitalWrite(ledPin_a_4, LOW);
// Loop thru and update all the arrays, and fades.
for( int i = 0 ; i < 8 ; i ++ ) //equal to & of digits
{
if( NumberArray[i] != currNumberArray[i] )
{
NumberArrayFadeInValue[i] += fadeStep;
NumberArrayFadeOutValue[i] -= fadeStep;
if( NumberArrayFadeInValue[i] >= fadeMax )
{
NumberArrayFadeInValue[i] = 2.0f;
NumberArrayFadeOutValue[i] = 4.0f; //affects the refresh cycle
currNumberArray[i] = NumberArray[i];
}
}
}
}
getSN74141.ino
// SN74141
// SN74141 : Truth Table
//D C B A #
//L,L,L,L 0
//L,L,L,H 1
//L,L,H,L 2
//L,L,H,H 3
//L,H,L,L 4
//L,H,L,H 5
//L,H,H,L 6
//L,H,H,H 7
//H,L,L,L 8
//H,L,L,H 9
// isSetupSN74141
void isSetupSN74141(){
pinMode(ledPin_0_a, OUTPUT);
pinMode(ledPin_0_b, OUTPUT);
pinMode(ledPin_0_c, OUTPUT);
pinMode(ledPin_0_d, OUTPUT);
pinMode(ledPin_1_a, OUTPUT);
pinMode(ledPin_1_b, OUTPUT);
pinMode(ledPin_1_c, OUTPUT);
pinMode(ledPin_1_d, OUTPUT);
pinMode(ledPin_a_1, OUTPUT);
pinMode(ledPin_a_2, OUTPUT);
pinMode(ledPin_a_3, OUTPUT);
pinMode(ledPin_a_4, OUTPUT);
// NOTE: Grounding on virtual pins 14 and 15
// (analog pins 0 and 1) will set the Hour and Mins.
// Set the vertual pin 14 (pin 0 on the analog inputs )
pinMode( iVirtual14, INPUT );
// Set pin 14 as a pull up resistor.
digitalWrite(iVirtual14, HIGH);
// Set the vertual pin 15 (pin 1 on the analog inputs )
pinMode( iVirtual15, INPUT );
// Set pin 15 as a pull up resistor.
digitalWrite(iVirtual15, HIGH);
}
// SetSN74141Chips
void SetSN74141Chips( int num2, int num1 )
{
// Set defaults
// Will display a zero.
int a = 0;
int b = 0;
int c = 0;
int d = 0;
// Load the a,b,c,d.. to send to the SN74141 IC (1)
switch( num1 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins.
digitalWrite(ledPin_0_d, d);
digitalWrite(ledPin_0_c, c);
digitalWrite(ledPin_0_b, b);
digitalWrite(ledPin_0_a, a);
// Load the a,b,c,d.. to send to the SN74141 IC (2)
switch( num2 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins
digitalWrite(ledPin_1_d, d);
digitalWrite(ledPin_1_c, c);
digitalWrite(ledPin_1_b, b);
digitalWrite(ledPin_1_a, a);
}
getTime.ino
// Time
void isTime(){
// Get milliseconds.
runTime = millis();
//int ssTime = millis();
int hourInput = digitalRead(iVirtual14);
int minInput = digitalRead(iVirtual15);
if( hourInput == 0 )
HourButtonPressed = true;
if( minInput == 0 )
MinButtonPressed = true;
if( HourButtonPressed == true && hourInput == 1 )
{
clockHourSet++;
HourButtonPressed = false;
}
if( MinButtonPressed == true && minInput == 1 )
{
clockMinSet++;
MinButtonPressed = false;
}
// Get time in seconds.
// Change this value to speed up or
// slow down the clock, set to smaller number such as 10, 1, or 100 for debugging
long time = (runTime) / 1000;
int sstime = (runTime) / 10;
// Set time based on offset..
// long hbump = 60*60*clockHourSet;
//long sbump = 60*60*60*clockHourSet; //change hourset to secondset
long hbump = 60*60*clockHourSet;
long mbump = 60*clockMinSet;
time += mbump + hbump;
// Convert time to days,hours,mins,seconds
long days = time / DAYS; time -= days * DAYS;
long hours = time / HOURS; time -= hours * HOURS;
long minutes = time / MINS; time -= minutes * MINS;
long seconds = time;
// long sseconds = 76;// time -= seconds * SECS;
long sseconds = runTime / SECS; time -= sseconds * SECS;
// Get the high and low order values for hours,min,seconds.
int lowerHours = hours % 10;
int upperHours = hours - lowerHours;
int lowerMins = minutes % 10;
int upperMins = minutes - lowerMins;
int lowerSeconds = seconds % 10;
int upperSeconds = seconds - lowerSeconds;
int lowerSSeconds = sseconds % 10;
//- lowerSSeconds;
int upperSSeconds = lowerSSeconds % 10; upperSSeconds = upperSSeconds /10;
if( upperSSeconds >= 10 ) upperSSeconds = upperSSeconds / 10;
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
if( upperHours == 0 && lowerHours == 0 )
{
upperHours = 1;
lowerHours = 2;
}
// Fill in the Number array used to display on the tubes.
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = upperMins;
NumberArray[4] = lowerMins;
NumberArray[3] = upperSeconds;
NumberArray[2] = lowerSeconds;
NumberArray[1] = lowerSSeconds; //upperSSeconds;
NumberArray[0] = lowerSSeconds; //lowerSSeconds;
Serial.print(lowerSSeconds);
Serial.println();
// Display.
//DisplayFadeNumberString();
// Display.
DisplayFadeNumberString();
}
setup.ino
// Setup
void setup() {
// isSetupSN74141
isSetupSN74141();
// Open serial communications
Serial.begin(9600);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
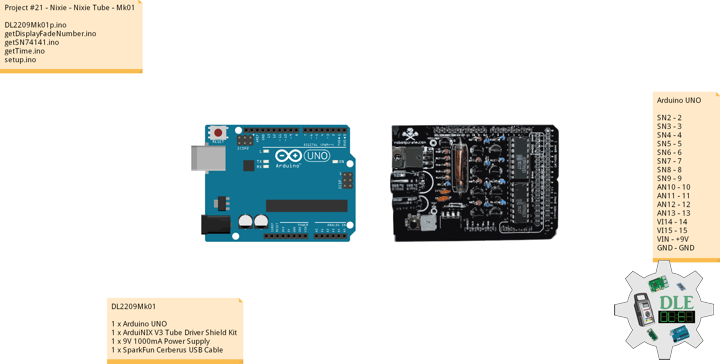
Project #21 – Nixie – Nixie Tube – Mk01
——
#DonLucElectronics #DonLuc #NixieTube #Nixie #ArduiNIX #ArduinoUNO #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Nixie Tube
A Nixie tube, or cold cathode display, is an electronic device used for displaying numerals or other information using glow discharge. The glass tube contains a wire-mesh anode and multiple cathodes, shaped like numerals or other symbols. Applying power to one cathode surrounds it with an orange glow discharge. The tube is filled with a gas at low pressure.
The early Nixie displays were made by a small vacuum tube manufacturer called Haydu Brothers Laboratories, and introduced in 1955 by Burroughs Corporation, who purchased Haydu. The name Nixie was derived by Burroughs from “NIX I”, an abbreviation of “Numeric Indicator eXperimental No. 1”, although this may have been a backronym designed to justify the evocation of the mythical creature with this name.
Citing dissatisfaction with the aesthetics of modern digital displays and a nostalgic fondness for the styling of obsolete technology, significant numbers of electronics enthusiasts have shown interest in reviving Nixies.
DL2209Mk01
1 x Arduino UNO
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
Arduino UNO
SN2 – 2
SN3 – 3
SN4 – 4
SN5 – 5
SN6 – 6
SN7 – 7
SN8 – 8
SN9 – 9
AN10 – 10
AN11 – 11
AN12 – 12
AN13 – 13
VI14 – 14
VI15 – 15
VIN – +9V
GND – GND
DL2209Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #21 - Nixie - Nixie Tube - Mk01
21-01
DL2209Mk01p.ino
1 x Arduino UNO
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// SN74141 (1)
int ledPin_0_a = 2;
int ledPin_0_b = 3;
int ledPin_0_c = 4;
int ledPin_0_d = 5;
// SN74141 (2)
int ledPin_1_a = 6;
int ledPin_1_b = 7;
int ledPin_1_c = 8;
int ledPin_1_d = 9;
// Anode pins
int ledPin_a_1 = 10;
int ledPin_a_2 = 11;
int ledPin_a_3 = 12;
int ledPin_a_4 = 13;
// NOTE: Grounding on virtual pins 14 and 15
// (analog pins 0 and 1) will set the Hour and Mins.
int iVirtual14 = 14;
int iVirtual15 = 15;
// Fade
float fadeMax = 0.1f;
float fadeStep = 0.1f;
// Number Array
int NumberArray[8]={0,0,0,0,0,0,0,0};
int currNumberArray[8]={0,0,0,0,0,0,0,0};
float NumberArrayFadeInValue[8]={0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f};
float NumberArrayFadeOutValue[8]={5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f};
// Defines
// Sub seconds
long SSECS = 100;
// Milliseconds in a Sec
long SECS = 60;
// 60 Seconds in a Min.
long MINS = 60;
// 60 Mins in an hour
long HOURS = 60 * MINS;
// 24 Hours in a day. > Note: change the 24 to a 12 for non military time.
long DAYS = 12 * HOURS;
// Time from when we started
long runTime = 0;
// Default time sets. clock will start at 12:34:00.
// This is so we can count the correct order of tubes.
long clockHourSet = 12;
long clockMinSet = 34;
long clockSecSet = 56;
long clockSSecSet = 12;
int HourButtonPressed = false;
int MinButtonPressed = false;
// Software Version Information
String sver = "21-01";
void loop() {
// Time
isTime();
}
getDisplayFadeNumber.ino
// Display Fade Number
void DisplayFadeNumberString()
{
// Anode channel 1 - numerals 0,4
SetSN74141Chips(currNumberArray[0],currNumberArray[4]);
digitalWrite(ledPin_a_1, HIGH);
delay(NumberArrayFadeOutValue[0]);
SetSN74141Chips(NumberArray[0],NumberArray[4]);
delay(NumberArrayFadeInValue[0]);
digitalWrite(ledPin_a_1, LOW);
// Anode channel 2 - numerals 1,5
SetSN74141Chips(currNumberArray[1],currNumberArray[5]);
digitalWrite(ledPin_a_2, HIGH);
delay(NumberArrayFadeOutValue[1]);
SetSN74141Chips(NumberArray[1],NumberArray[5]);
delay(NumberArrayFadeInValue[1]);
digitalWrite(ledPin_a_2, LOW);
// Anode channel 3 - numerals 2,6
SetSN74141Chips(currNumberArray[2],currNumberArray[6]);
digitalWrite(ledPin_a_3, HIGH);
delay(NumberArrayFadeOutValue[2]);
SetSN74141Chips(NumberArray[2],NumberArray[6]);
delay(NumberArrayFadeInValue[2]);
digitalWrite(ledPin_a_3, LOW);
// Anode channel 4 - numerals 3,7
SetSN74141Chips(currNumberArray[3],currNumberArray[7]);
digitalWrite(ledPin_a_4, HIGH);
delay(NumberArrayFadeOutValue[3]);
SetSN74141Chips(NumberArray[3],NumberArray[7]);
delay(NumberArrayFadeInValue[3]);
digitalWrite(ledPin_a_4, LOW);
// Loop thru and update all the arrays, and fades.
for( int i = 0 ; i < 8 ; i ++ ) //equal to & of digits
{
if( NumberArray[i] != currNumberArray[i] )
{
NumberArrayFadeInValue[i] += fadeStep;
NumberArrayFadeOutValue[i] -= fadeStep;
if( NumberArrayFadeInValue[i] >= fadeMax )
{
NumberArrayFadeInValue[i] = 2.0f;
NumberArrayFadeOutValue[i] = 4.0f; //affects the refresh cycle
currNumberArray[i] = NumberArray[i];
}
}
}
}
getSN74141.ino
// SN74141
// SN74141 : Truth Table
//D C B A #
//L,L,L,L 0
//L,L,L,H 1
//L,L,H,L 2
//L,L,H,H 3
//L,H,L,L 4
//L,H,L,H 5
//L,H,H,L 6
//L,H,H,H 7
//H,L,L,L 8
//H,L,L,H 9
// isSetupSN74141
void isSetupSN74141(){
pinMode(ledPin_0_a, OUTPUT);
pinMode(ledPin_0_b, OUTPUT);
pinMode(ledPin_0_c, OUTPUT);
pinMode(ledPin_0_d, OUTPUT);
pinMode(ledPin_1_a, OUTPUT);
pinMode(ledPin_1_b, OUTPUT);
pinMode(ledPin_1_c, OUTPUT);
pinMode(ledPin_1_d, OUTPUT);
pinMode(ledPin_a_1, OUTPUT);
pinMode(ledPin_a_2, OUTPUT);
pinMode(ledPin_a_3, OUTPUT);
pinMode(ledPin_a_4, OUTPUT);
// NOTE: Grounding on virtual pins 14 and 15
// (analog pins 0 and 1) will set the Hour and Mins.
// Set the vertual pin 14 (pin 0 on the analog inputs )
pinMode( iVirtual14, INPUT );
// Set pin 14 as a pull up resistor.
digitalWrite(iVirtual14, HIGH);
// Set the vertual pin 15 (pin 1 on the analog inputs )
pinMode( iVirtual15, INPUT );
// Set pin 15 as a pull up resistor.
digitalWrite(iVirtual15, HIGH);
}
// SetSN74141Chips
void SetSN74141Chips( int num2, int num1 )
{
// Set defaults
// Will display a zero.
int a = 0;
int b = 0;
int c = 0;
int d = 0;
// Load the a,b,c,d.. to send to the SN74141 IC (1)
switch( num1 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins.
digitalWrite(ledPin_0_d, d);
digitalWrite(ledPin_0_c, c);
digitalWrite(ledPin_0_b, b);
digitalWrite(ledPin_0_a, a);
// Load the a,b,c,d.. to send to the SN74141 IC (2)
switch( num2 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins
digitalWrite(ledPin_1_d, d);
digitalWrite(ledPin_1_c, c);
digitalWrite(ledPin_1_b, b);
digitalWrite(ledPin_1_a, a);
}
getTime.ino
// Time
void isTime(){
// Get milliseconds.
runTime = millis();
//int ssTime = millis();
int hourInput = digitalRead(iVirtual14);
int minInput = digitalRead(iVirtual15);
if( hourInput == 0 )
HourButtonPressed = true;
if( minInput == 0 )
MinButtonPressed = true;
if( HourButtonPressed == true && hourInput == 1 )
{
clockHourSet++;
HourButtonPressed = false;
}
if( MinButtonPressed == true && minInput == 1 )
{
clockMinSet++;
MinButtonPressed = false;
}
// Get time in seconds.
// Change this value to speed up or
// slow down the clock, set to smaller number such as 10, 1, or 100 for debugging
long time = (runTime) / 1000;
int sstime = (runTime) / 10;
// Set time based on offset..
// long hbump = 60*60*clockHourSet;
//long sbump = 60*60*60*clockHourSet; //change hourset to secondset
long hbump = 60*60*clockHourSet;
long mbump = 60*clockMinSet;
time += mbump + hbump;
// Convert time to days,hours,mins,seconds
long days = time / DAYS; time -= days * DAYS;
long hours = time / HOURS; time -= hours * HOURS;
long minutes = time / MINS; time -= minutes * MINS;
long seconds = time;
// long sseconds = 76;// time -= seconds * SECS;
long sseconds = runTime / SECS; time -= sseconds * SECS;
// Get the high and low order values for hours,min,seconds.
int lowerHours = hours % 10;
int upperHours = hours - lowerHours;
int lowerMins = minutes % 10;
int upperMins = minutes - lowerMins;
int lowerSeconds = seconds % 10;
int upperSeconds = seconds - lowerSeconds;
int lowerSSeconds = sseconds % 10;
//- lowerSSeconds;
int upperSSeconds = lowerSSeconds % 10; upperSSeconds = upperSSeconds /10;
if( upperSSeconds >= 10 ) upperSSeconds = upperSSeconds / 10;
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
if( upperHours == 0 && lowerHours == 0 )
{
upperHours = 1;
lowerHours = 2;
}
// Fill in the Number array used to display on the tubes.
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = upperMins;
NumberArray[4] = lowerMins;
NumberArray[3] = upperSeconds;
NumberArray[2] = lowerSeconds;
NumberArray[1] = lowerSSeconds; //upperSSeconds;
NumberArray[0] = lowerSSeconds; //lowerSSeconds;
Serial.print(lowerSSeconds);
Serial.println();
// Display.
//DisplayFadeNumberString();
// Display.
DisplayFadeNumberString();
}
setup.ino
// Setup
void setup() {
// isSetupSN74141
isSetupSN74141();
// Open serial communications
Serial.begin(9600);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #22: Synthesizer – Gain – Mk14
——
#DonLucElectronics #DonLuc #Synthesizer #Mozzi #Keyboard #ADSREnvelope #Arduino #SparkFunRedBoard #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
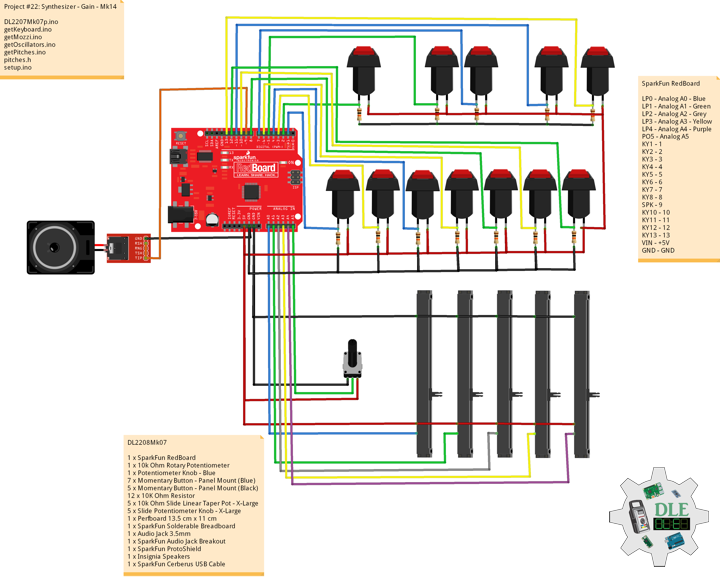
——
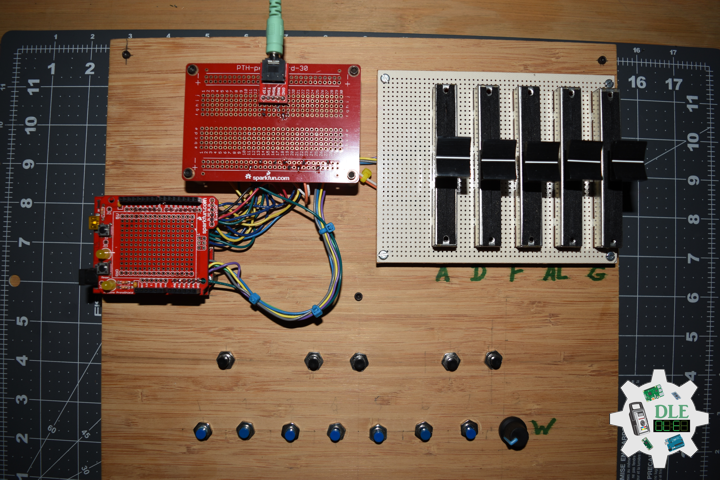
——
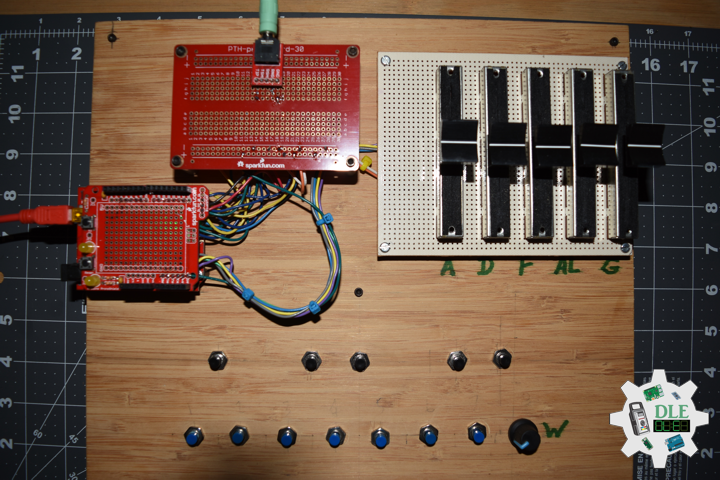
——
Gain
Gain is the process of managing the relative levels in each step of an audio signal flow to prevent introduction of noise and distortion, particularly in the analogue realm. Ideal gain occurs when each component in an audio signal flow is receiving and transmitting signal in the optimum region of its dynamic range.
Before we can effectively compare these two properties of audio, we need to make sure we understand what each is separately. Keep in mind that both modulate the amplitude of a signal, which translates into a change in loudness. It gets more complicated, dealing with voltage and current in electronics. Amplitude is measured in voltage, which is a direct corollary to volume. In plain language, gain is kind of like an amplitude knob at the input of a piece of hardware or software that controls the loudness before it goes through the circuitry.
DL2208Mk07
1 x SparkFun RedBoard
1 x 10k Ohm Rotary Potentiometer
1 x Potentiometer Knob – Blue
7 x Momentary Button – Panel Mount (Blue)
5 x Momentary Button – Panel Mount (Black)
12 x 10K Ohm Resistor
5 x 10k Ohm Slide Linear Taper Pot – X-Large
5 x Slide Potentiometer Knob – X-Large
1 x Perfboard 13.5 cm x 11 cm
1 x SparkFun Solderable Breadboard
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x SparkFun ProtoShield
1 x Insignia Speakers
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard
LP0 – Analog A0 – Blue
LP1 – Analog A1 – Green
LP2 – Analog A2 – Grey
LP3 – Analog A3 – Yellow
LP4 – Analog A4 – Purple
PO5 – Analog A5
KY1 – 1
KY2 – 2
KY3 – 3
KY4 – 4
KY5 – 5
KY6 – 6
KY7 – 7
KY8 – 8
SPK – 9
KY10 – 10
KY11 – 11
KY12 – 12
KY13 – 13
VIN – +5V
GND – GND
——
DL2208Mk07p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #22: Synthesizer - Gain - Mk14
22-14
DL2208Mk07p.ino
1 x SparkFun RedBoard
1 x 10k Ohm Rotary Potentiometer
1 x Potentiometer Knob - Blue
7 x Momentary Button - Panel Mount (Blue)
5 x Momentary Button - Panel Mount (Black)
12 x 1K Ohm Resistor
5 x 10k Ohm Slide Linear Taper Pot - X-Large
5 x Slide Potentiometer Knob - X-Large
1 x Perfboard 13.5 cm x 11 cm
1 x SparkFun Solderable Breadboard
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x SparkFun ProtoShield
1 x Insignia Speakers
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Pitches
#include "pitches.h"
// Mozzi
#include <MozziGuts.h>
// Oscillator
#include <Oscil.h>
// Sine Wave Table For Oscillator
#include <tables/sin2048_int8.h>
// Cosine Wave Table For Oscillator
#include <tables/cos2048_int8.h>
// Sawtooth Wave Table For Oscillator
#include <tables/saw2048_int8.h>
// Triangle Wave Table For Oscillator
#include <tables/triangle2048_int8.h>
// Square Wave Table For Oscillator
#include <tables/square_no_alias_2048_int8.h>
// ADSR envelope generator
#include <ADSR.h>
// Simple Keyboard
// Minimum reading of the button that generates a note
const int iKeyboard1 = 1;
const int iKeyboard2 = 2;
const int iKeyboard3 = 3;
const int iKeyboard4 = 4;
const int iKeyboard5 = 5;
const int iKeyboard6 = 6;
const int iKeyboard7 = 7;
const int iKeyboard8 = 8;
const int iKeyboard10 = 10;
const int iKeyboard11 = 11;
const int iKeyboard12 = 12;
const int iKeyboard13 = 13;
// Button is pressed
int iB1 = 1;
int iB2 = 1;
int iB3 = 1;
int iB4 = 1;
int iB5 = 1;
int iB6 = 1;
int iB7 = 1;
int iB8 = 1;
int iB10 = 1;
int iB11 = 1;
int iB12 = 1;
int iB13 = 1;
// Set the input for the potentiometer for Frequency to analog pin 2
const int potFreq = A2;
int iFreg = 1;
int iNoteA = 0;
int iNoteAS = 0;
int iNoteB = 0;
int iNoteC = 0;
int iNoteCS = 0;
int iNoteD = 0;
int iNoteDS = 0;
int iNoteE = 0;
int iNoteF = 0;
int iNoteFS = 0;
int iNoteG = 0;
int iNoteGS = 0;
// Gain
const int iGainPot4 = A4;
// Control variable, use the smallest data size you can for anything used in audio
byte gain = 0;
int iGain = 0;
//Oscillator Functions declared for output envelope 1
// Carrier
Oscil<COS2048_NUM_CELLS, AUDIO_RATE> aCarrier;
// Set the input for the potentiometer for Oscillator to analog pin 4
const int potWave = A5;
// Wave
int iWave;
int iWaveLevel;
// ADSR declaration/definition
// Comment out to use control rate of 128
#define CONTROL_RATE 128
ADSR <CONTROL_RATE, CONTROL_RATE> envelope1;
// Set the input for the potentiometer Attack to analog pin 1
const int potAttack = A0;
// Attack
int attack_level = 0;
int iAttack = 0;
// Set the input for the potentiometer for Decay to analog pin 2
const int potDecay = A1;
// Decay
int decay_level = 0;
int iDecay = 0;
// Set the input for the potentiometer Attack Time to analog pin 3
const int potAttackTime = A3;
// Attack Time
int AttackTime_level = 0;
int iAttackTime = 0;
// Software Version Information
String sver = "22-14";
void loop() {
// Audio Hook
audioHook();
}
getKeyboard.ino
// getKeyboard
// setupKeyboard
void setupKeyboard() {
// Initialize the button pin as an input
pinMode(iKeyboard1, INPUT_PULLUP);
pinMode(iKeyboard2, INPUT_PULLUP);
pinMode(iKeyboard3, INPUT_PULLUP);
pinMode(iKeyboard4, INPUT_PULLUP);
pinMode(iKeyboard5, INPUT_PULLUP);
pinMode(iKeyboard6, INPUT_PULLUP);
pinMode(iKeyboard7, INPUT_PULLUP);
pinMode(iKeyboard8, INPUT_PULLUP);
pinMode(iKeyboard10, INPUT_PULLUP);
pinMode(iKeyboard11, INPUT_PULLUP);
pinMode(iKeyboard12, INPUT_PULLUP);
pinMode(iKeyboard13, INPUT_PULLUP);
}
// isKeyboard
void isKeyboard() {
// Oscillators
isOscil();
// Choose envelope levels
// attack_level
iAttack = mozziAnalogRead( potAttack );
attack_level = map( iAttack, 0, 1023, 100, 400);
// Attack Level
envelope1.setAttackLevel( attack_level );
// decay_level
iDecay = mozziAnalogRead( potDecay );
decay_level = map( iDecay, 0, 1023, 50, 255);
// Decay Level
envelope1.setDecayLevel( decay_level );
// AttackTime_level
iAttackTime = mozziAnalogRead( potAttackTime );
AttackTime_level = map( iAttackTime, 0, 1023, 0, 900);
// Attack Time Level
envelope1.setAttackTime( AttackTime_level );
// Read the state of the button value 1
if ( digitalRead(iKeyboard1) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 1
iB1 = iB1 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteA);
}
else
{
iB1 = iB1 - 1;
}
// Read the state of the button value 2
if ( digitalRead(iKeyboard2) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 2
iB2 = iB2 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteAS);
}
else
{
iB2 = iB2 - 1;
}
// Read the state of the button value 3
if ( digitalRead(iKeyboard3) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 3
iB3 = iB3 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteB);
}
else
{
iB3 = iB3 - 1;
}
// Read the state of the button value 4
if ( digitalRead(iKeyboard4) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 4
iB4 = iB4 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteC);
}
else
{
iB4 = iB4 - 1;
}
// Read the state of the button value 5
if ( digitalRead(iKeyboard5) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 5
iB5 = iB5 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteCS);
}
else
{
iB5 = iB5 - 1;
}
// Read the state of the button value 6
if ( digitalRead(iKeyboard6) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 6
iB6 = iB6 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteD);
}
else
{
iB6 = iB6 - 1;
}
// Read the state of the button value 7
if ( digitalRead(iKeyboard7) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 7
iB7 = iB7 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteDS);
}
else
{
iB7 = iB7 - 1;
}
// Read the state of the button value 8
if ( digitalRead(iKeyboard8) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 8
iB8 = iB8 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteE);
}
else
{
iB8 = iB8 - 1;
}
// Read the state of the button value 10
if ( digitalRead(iKeyboard10) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 10
iB10 = iB10 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteF);
}
else
{
iB10 = iB10 - 1;
}
// Read the state of the button value 11
if ( digitalRead(iKeyboard11) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 11
iB11 = iB11 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteFS);
}
else
{
iB11 = iB11 - 1;
}
// Read the state of the button value 12
if ( digitalRead(iKeyboard12) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 12
iB12 = iB12 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteG);
}
else
{
iB12 = iB12 - 1;
}
// Read the state of the button value 13
if ( digitalRead(iKeyboard13) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 13
iB13 = iB13 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aCarrier.setFreq(iNoteGS);
}
else
{
iB13 = iB13 - 1;
}
}
getMozzi.ino
// Mozzi
// Update Control
void updateControl(){
// Frequency
isPitches();
// Keyboard
isKeyboard();
// Gain
// As byte, this will automatically roll around to 255 when it passes 0
iGain = mozziAnalogRead( iGainPot4 );
gain = map( iGain, 0, 1023, 0, 255);
}
// Update Audio
int updateAudio()
{
// Update Audio
// ADSR declaration/definition
envelope1.update();
// >>8 for AUDIO_MODE STANDARD
return (int) (envelope1.next() * aCarrier.next() * gain)>>8;
}
getOscillators.ino
// Oscillators
// isOscil
void isOscil(){
// Oscillators
// Value is 0-1023
iWave = mozziAnalogRead(potWave);
iWaveLevel = map(iWave, 0, 1023, 1, 5);
switch (iWaveLevel) {
case 1:
// Sine Wave
aCarrier.setTable(SIN2048_DATA);
break;
case 2:
// Cosine Wave
aCarrier.setTable(COS2048_DATA);
break;
case 3:
// Sawtooth Wave
aCarrier.setTable(SAW2048_DATA);
break;
case 4:
// Triangle Wave
aCarrier.setTable(TRIANGLE2048_DATA);
break;
case 5:
// Square Wave
aCarrier.setTable(SQUARE_NO_ALIAS_2048_DATA);
break;
default: // Case 0
// Sine Wave
aCarrier.setTable(SIN2048_DATA);
break;
}
}
getPitches.ino
// Pitches
// isPitches
void isPitches(){
// Frequency
// Value is 0-1023
iFreg = mozziAnalogRead(potFreq);
iFreg = map(iFreg, 0, 1023, 2, 5);
// Range Frequency Note Low => High
switch ( iFreg ) {
case 1:
// NOTE A1
iNoteA = NOTE_A1;
iNoteAS = NOTE_AS1;
iNoteB = NOTE_B1;
iNoteC = NOTE_C2;
iNoteCS = NOTE_CS2;
iNoteD = NOTE_D2;
iNoteDS = NOTE_DS2;
iNoteE = NOTE_E2;
iNoteF = NOTE_F2;
iNoteFS = NOTE_FS2;
iNoteG = NOTE_G2;
iNoteGS = NOTE_GS2;
break;
case 2:
// NOTE A2
iNoteA = NOTE_A2;
iNoteAS = NOTE_AS2;
iNoteB = NOTE_B2;
iNoteC = NOTE_C3;
iNoteCS = NOTE_CS3;
iNoteD = NOTE_D3;
iNoteDS = NOTE_DS3;
iNoteE = NOTE_E3;
iNoteF = NOTE_F3;
iNoteFS = NOTE_FS3;
iNoteG = NOTE_G3;
iNoteGS = NOTE_GS3;
break;
case 3:
// NOTE A3
iNoteA = NOTE_A3;
iNoteAS = NOTE_AS3;
iNoteB = NOTE_B3;
iNoteC = NOTE_C4;
iNoteD = NOTE_D4;
iNoteDS = NOTE_DS4;
iNoteE = NOTE_E4;
iNoteF = NOTE_F4;
iNoteFS = NOTE_FS4;
iNoteG = NOTE_G4;
iNoteGS = NOTE_GS4;
break;
case 4:
// NOTE A4
iNoteA = NOTE_A4;
iNoteAS = NOTE_AS4;
iNoteB = NOTE_B4;
iNoteC = NOTE_C5;
iNoteCS = NOTE_CS5;
iNoteD = NOTE_D5;
iNoteE = NOTE_E5;
iNoteF = NOTE_F5;
iNoteFS = NOTE_FS5;
iNoteG = NOTE_G5;
iNoteGS = NOTE_GS5;
break;
case 5:
// NOTE A5
iNoteA = NOTE_A5;
iNoteAS = NOTE_AS5;
iNoteB = NOTE_B5;
iNoteC = NOTE_C6;
iNoteCS = NOTE_CS6;
iNoteD = NOTE_D6;
iNoteDS = NOTE_DS6;
iNoteE = NOTE_E6;
iNoteF = NOTE_F6;
iNoteFS = NOTE_FS6;
iNoteG = NOTE_G6;
iNoteGS = NOTE_GS6;
break;
case 6:
// NOTE A6
iNoteA = NOTE_A6;
iNoteAS = NOTE_AS6;
iNoteB = NOTE_B6;
iNoteC = NOTE_C7;
iNoteCS = NOTE_CS7;
iNoteD = NOTE_D7;
iNoteDS = NOTE_DS7;
iNoteE = NOTE_E7;
iNoteF = NOTE_F7;
iNoteFS = NOTE_FS7;
iNoteG = NOTE_G7;
iNoteGS = NOTE_GS7;
break;
}
}
pitches.h
/***************************************************************** * Pitches NOTE_B0 <=> NOTE_DS8 - NOTE_A4 is "A" measured at 440Hz *****************************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
setup.ino
// Setup
void setup() {
// Setup Keyboard
setupKeyboard();
// Mozzi Start
startMozzi( CONTROL_RATE );
// Sets Attack and Decay Levels; assumes Sustain, Decay, and Idle times
envelope1.setADLevels(200,200);
// Sets Decay time in milliseconds
envelope1.setDecayTime(200);
// Sustain Time setting for envelope1
envelope1.setSustainTime(52500);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc