XBee
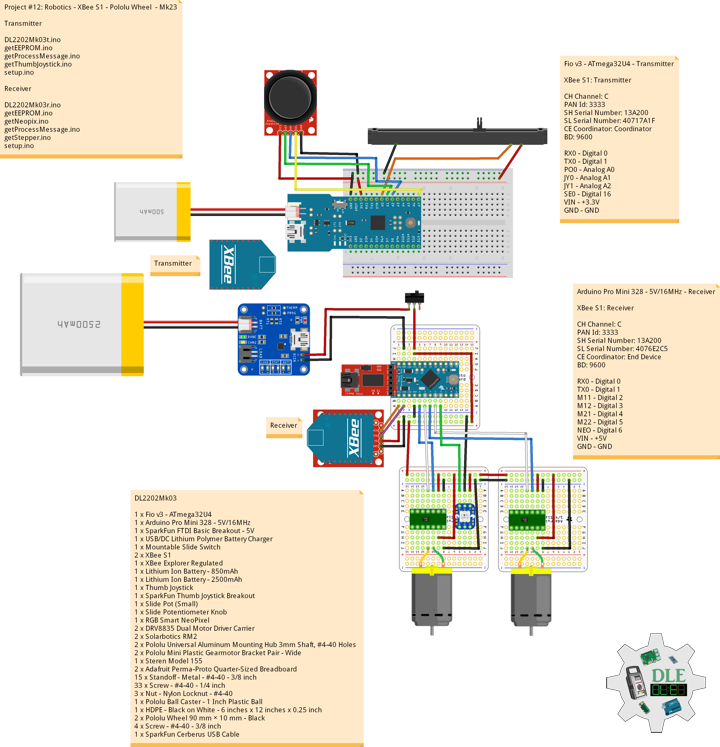
Project #12: Robotics – Pololu Wheel – Mk23
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Pololu Wheel 90 mm × 10 mm – Black
These black plastic wheels have silicone tires and measure 90 mm (3.54 inches) in diameter, and they press-fit onto the 3mm D shafts on many of our motors, including our micro metal gearmotors and our mini plastic gearmotors. Additionally, this wheel is compatible with several of our universal mounting hubs, which can serve as adapters for motors with different shafts. Six mounting holes for #4 or M3 screws make it possible to use the wheel with any of our universal mounting hubs for those screw sizes, enabling these wheels to be used with our larger metal gearmotors and stepper motors. The included silicone tires, which feature horizontal treads for improved traction.
DL2202Mk03
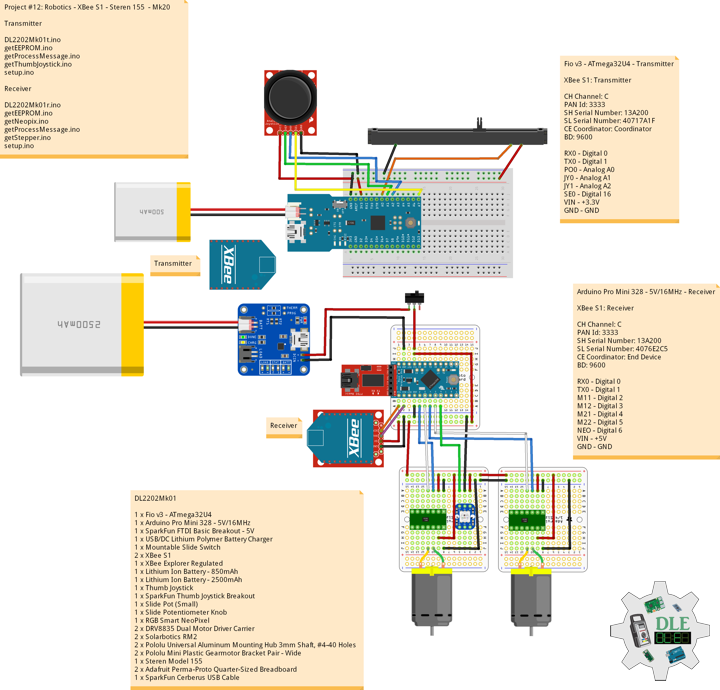
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm – Black
4 x Screw – #4-40 – 3/8 inch
1 x SparkFun Cerberus USB Cable
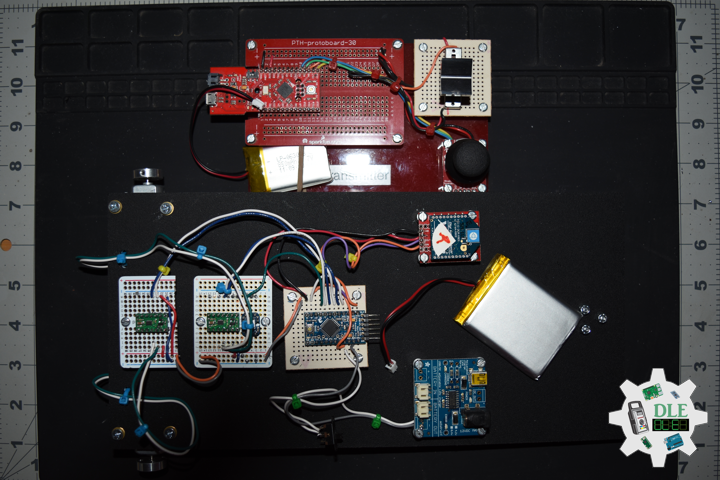
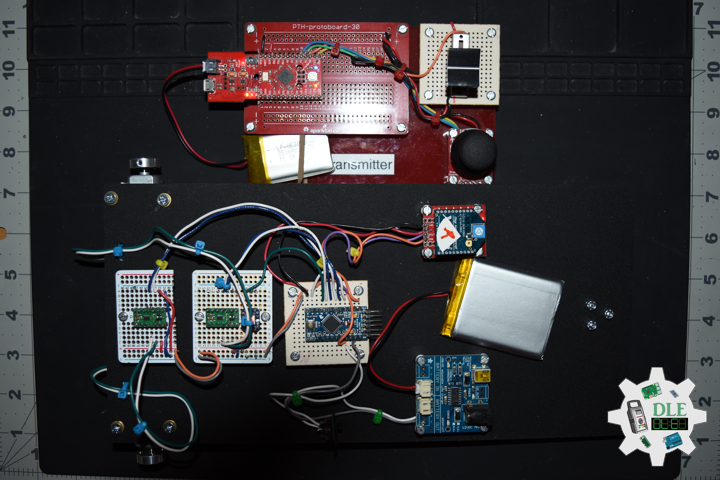
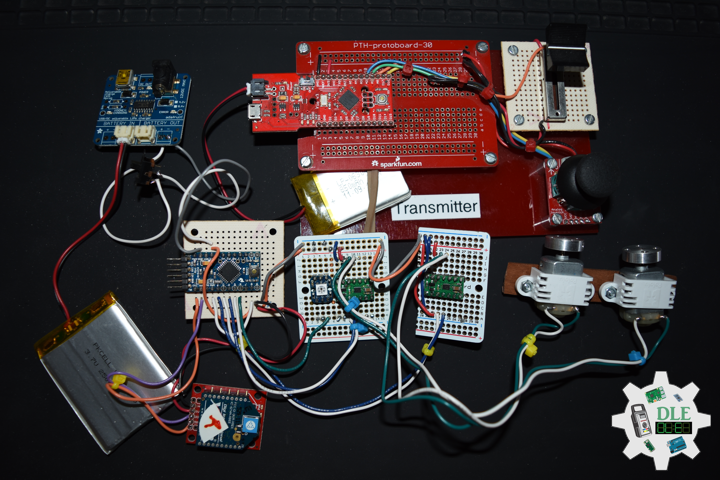
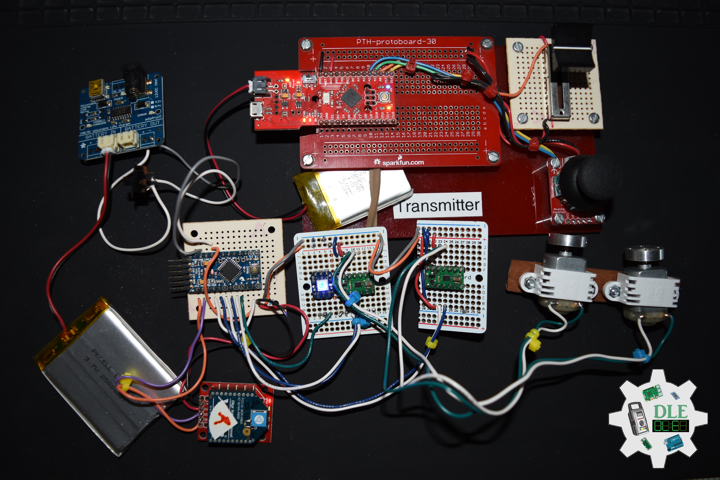
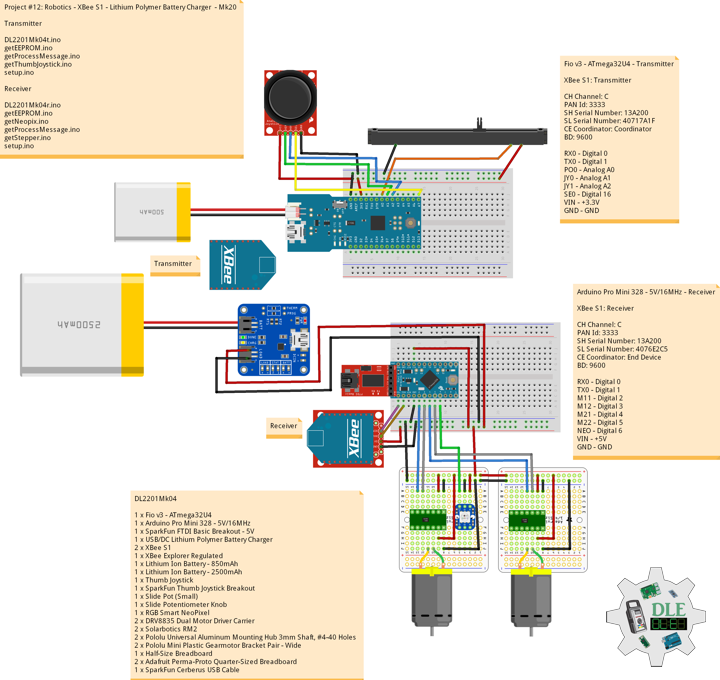
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk03t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Transmitter
DL2202Mk03t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-23t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk03r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Wheel - Mk23
02-03
Receiver
DL2202Mk03r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
2 x Pololu Wheel 90 mm × 10 mm - Black
4 x Screw - #4-40 - 3/8 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-23r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 80, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Backward
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Forward
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
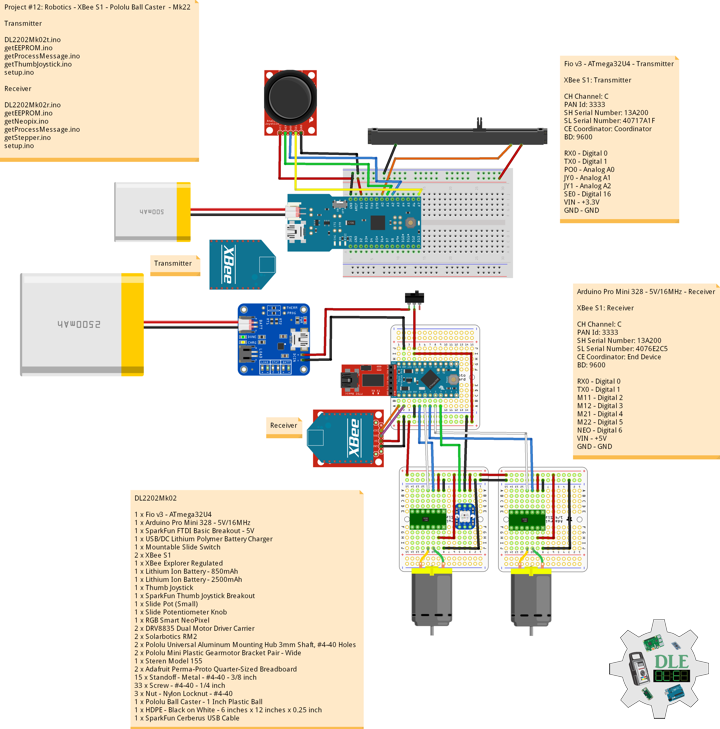
Project #12: Robotics – Pololu Ball Caster – Mk22
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Pololu Ball Caster with 1 Inch Plastic Ball and Ball Bearings
This ball caster uses a 1 inch diameter plastic ball and has an overall height of 1.1 inches (29 mm). The two-part housing snaps together to securely enclose the ball and three ball bearings that minimize friction between the ball and the ABS housing.
This ball caster kit includes a two-part black ABS housing, a 1 inch diameter POM plastic ball, three 3 mm × 7 mm × 3 mm ball bearings, and three dowel pins used to hold the ball bearings. When assembled, the ball caster is capable of rolling in any direction with low friction, making it suitable for use as a third contact point for wheeled, differential-drive robots weighing up to around ten pounds.
The base piece of the housing has holes for three mounting screws and slots for ball bearings. The second part of the housing snaps into the base piece to secure the ball and ball bearings. The assembled ball caster has an overall height of 1.1 inches (29 mm).
DL2202Mk02
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff – Metal – #4-40 – 3/8 inch
33 x Screw – #4-40 – 1/4 inch
3 x Nut – Nylon Locknut – #4-40
1 x Pololu Ball Caster – 1 Inch Plastic Ball
1 x HDPE – Black on White – 6 inches x 12 inches x 0.25 inch
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2202Mk02t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Ball Caster - Mk22
02-02
Transmitter
DL2202Mk02t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-22t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk02r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Pololu Ball Caster - Mk22
02-02
Receiver
DL2202Mk02r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
15 x Standoff - Metal - #4-40 - 3/8 inch
33 x Screw - #4-40 - 1/4 inch
3 x Nut - Nylon Locknut - #4-40
1 x Pololu Ball Caster - 1 Inch Plastic Ball
1 x HDPE - Black on White - 6 inches x 12 inches x 0.25 inch
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-22r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Steren 155 – Mk21
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Perforated Phenolic Plate
So you finish your electronics projects, such as printed circuits. We know that designing a prototype or electronic project can be a complicated task if you do not have the necessary items to carry it out, so with us you it a phenolic plates of a face, two sided or perforated, ferric chloride, auto-adherable tracks, leaves thermal transfer or permanent ink markers so that your circuits are perfect.
Steren Model 155
Bakelite phenolic plate with copper, 4.5 cm x 4.5 cm, engraved and perforated with 164 orifices for components and 4 for fixing the plate. Ideal for projects or prototypes.
DL2202Mk01
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2202Mk01t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Steren 155 - Mk21
02-01
Transmitter
DL2202Mk01t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-21t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
DL2202Mk01r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Steren 155 - Mk21
02-01
Receiver
DL2202Mk01r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Mountable Slide Switch
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Steren Model 155
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-21r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Lithium Polymer Battery Charger – Mk20
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
USB/DC Lithium Polymer Battery Charger 5-12V – 3.7/4.2v Cells
Charge your single-cell lithium ion/polymer battery any which way you like with this board. Other nice things about this charger include multiple LEDs for power & charging status, including a charging LED which will blink when the battery is full. If the charger gets too hot from high-speed charging, it will slow down the charge rate automatically. You can easily adjust the charge rate up to 1.2A or down to 100mA. For use with Adafruit Lipoly/LiIon batteries only. Other batteries may have different voltage, chemistry, polarity or pinout.
- Use USB or DC power – 5 to 12V input
- Charges one single-cell 3.7/4.2v batteries with constant current/constant voltage
- Three indicator LEDs – green for Power, orange for charging and red for error
- Charging LED will blink when the battery is full
- 2 JST connections so you can keep the battery plugged in and powering your project
- Terminal block connections galore just solder in 3.5mm terminal blocks
- Default charge rate is about 500mA, but you can easily change this by soldering in a through-hole resistor on. The chip can do 100-1200 mA charging
- Safety timer will stop charging after about 14 hours
- The chip supports a standard 10K thermistor, which we have stuffed as a standard resistor. You can solder in a thermistor easily
DL2201Mk04
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
1 x USB/DC Lithium Polymer Battery Charger
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Lithium Ion Battery – 2500mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2201Mk04t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Lithium Polymer Battery Charger - Mk20
01-04
Transmitter
DL2201Mk04t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-20t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
——
DL2201Mk04r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Lithium Polymer Battery Charger - Mk20
01-04
Receiver
DL2201Mk04r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x USB/DC Lithium Polymer Battery Charger
1 x Lithium Ion Battery - 2500mAh
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-20r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
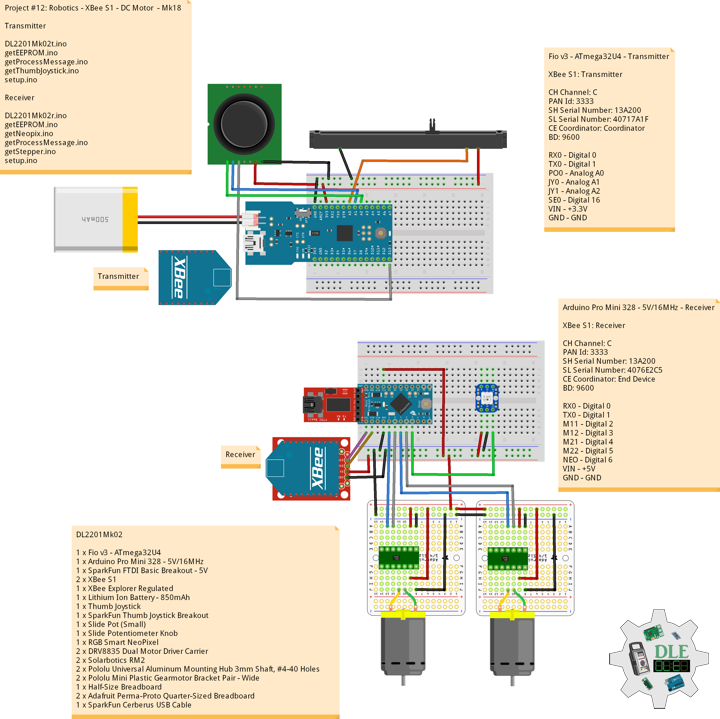
Project #12: Robotics – DC Motor – Mk18
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #ArduinoProMini #XBee #DCMotor #MotorDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
DC Motor
A DC motor is any of a class of rotary electrical motors that converts direct current electrical energy into mechanical energy. The most common types rely on the forces produced by magnetic fields. Nearly all types of DC motors have some internal mechanism, either electromechanical or electronic, to periodically change the direction of current in part of the motor.
DC motors were the first form of motor widely used, as they could be powered from existing direct-current lighting power distribution systems. A DC motor’s speed can be controlled over a wide range, using either a variable supply voltage or by changing the strength of current in its field windings. Small DC motors are used in tools, toys, and appliances. The universal motor can operate on direct current but is a lightweight brushed motor used for portable power tools and appliances. Larger DC motors are currently used in propulsion of electric vehicles, elevator and hoists, and in drives for steel rolling mills. The advent of power electronics has made replacement of DC motors with AC motors possible in many applications.
DL2201Mk02
1 x Fio v3 – ATmega32U4
1 x Arduino Pro Mini 328 – 5V/16MHz
1 x SparkFun FTDI Basic Breakout – 5V
2 x XBee S1
1 x XBee Explorer Regulated
1 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair – Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2201Mk02t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - DC Motor - Mk18
01-02
DL2201Mk02t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-18t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Arduino Pro Mini 328 – 5V/16MHz – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
M11 – Digital 2
M12 – Digital 3
M21 – Digital 4
M22 – Digital 5
NEO – Digital 6
VIN – +5V
GND – GND
——
DL2201Mk02r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - DL2201Mk02r - Mk18
01-02
DL2201Mk02r.ino
1 x Arduino Pro Mini 328 - 5V/16MHz
1 x SparkFun FTDI Basic Breakout - 5V
1 x XBee S1
1 x XBee Explorer Regulated
1 x RGB Smart NeoPixel
2 x DRV8835 Dual Motor Driver Carrier
2 x Solarbotics RM2
2 x Pololu Universal Aluminum Mounting Hub 3mm Shaft, #4-40 Holes
2 x Pololu Mini Plastic Gearmotor Bracket Pair - Wide
1 x Half-Size Breadboard
2 x Adafruit Perma-Proto Quarter-Sized Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// Solarbotics RM2 -> 1
#define MOTOR1_IN1 2
#define MOTOR1_IN2 3
// Solarbotics RM2 -> 2
#define MOTOR2_IN1 4
#define MOTOR2_IN2 5
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select1 = 0;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 1;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-18r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() > 0 )
{
// Read the incoming byte:
incb = Serial.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isRM2Motor => Message
isRM2Motor();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getRM2Motor.ino
// RM2 Motor
// Setup RM2 Motor
void isSetupRM2Motor() {
// Solarbotics RM2 -> 1
pinMode(MOTOR1_IN1, OUTPUT);
pinMode(MOTOR1_IN2, OUTPUT);
// Solarbotics RM2 -> 2
pinMode(MOTOR2_IN1, OUTPUT);
pinMode(MOTOR2_IN2, OUTPUT);
}
// isRM2Motor
void isRM2Motor() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select1 = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Power
iPower = map(iPower, 0, 1023, 30, 200);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
} else if ( mapVer == 512 ) {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 2;
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 2:
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 3:
// Right
// Solarbotics RM2 -> 1 Forward
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, iPower);
delay(10);
// Solarbotics RM2 -> 2 Backward
digitalWrite(MOTOR2_IN2, LOW);
analogWrite(MOTOR2_IN1, iPower);
delay(10);
break;
case 4:
// Left
// Solarbotics RM2 -> 1 Backward
digitalWrite(MOTOR1_IN2, LOW);
analogWrite(MOTOR1_IN1, iPower);
delay(10);
// Solarbotics RM2 -> 2 Forward
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, iPower);
delay(10);
break;
case 5:
// Stop
// NeoPixels Red
//zz = 2;
//isNUMPIXELS();
// Solarbotics RM2 -> 1
digitalWrite(MOTOR1_IN1, LOW);
analogWrite(MOTOR1_IN2, 0);
delay(10);
// Solarbotics RM2 -> 2
digitalWrite(MOTOR2_IN1, LOW);
analogWrite(MOTOR2_IN2, 0);
delay(10);
break;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Setup Solarbotics RM2 Motor
isSetupRM2Motor();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – EasyDriver – Mk16
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #XBee #Stepper #EasyDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
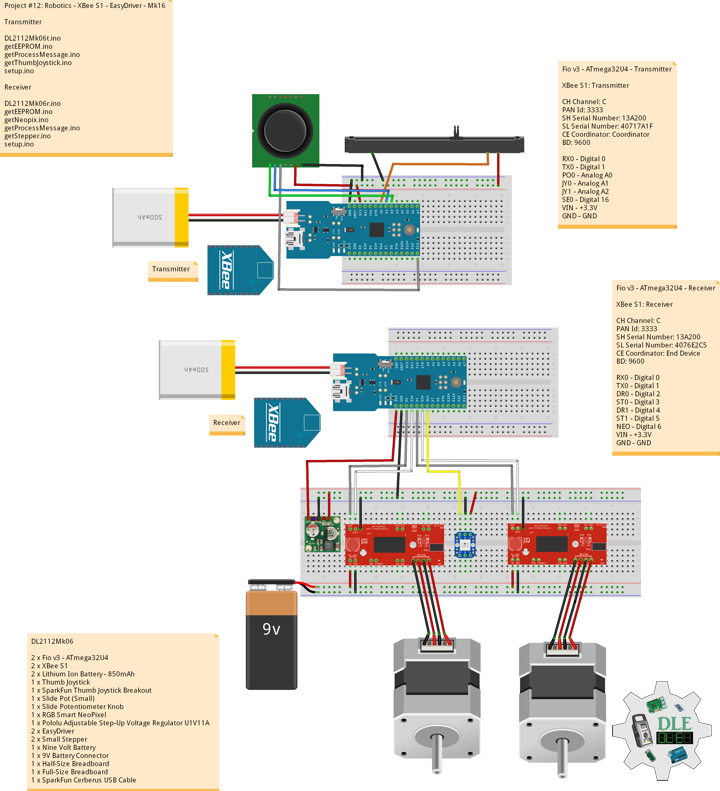
——
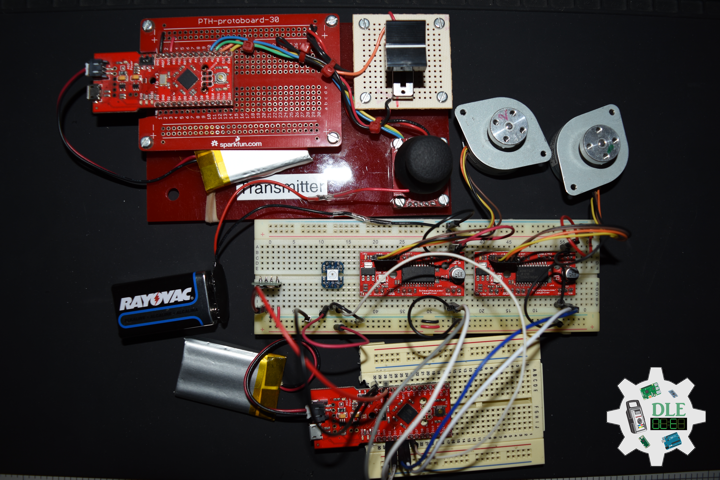
——
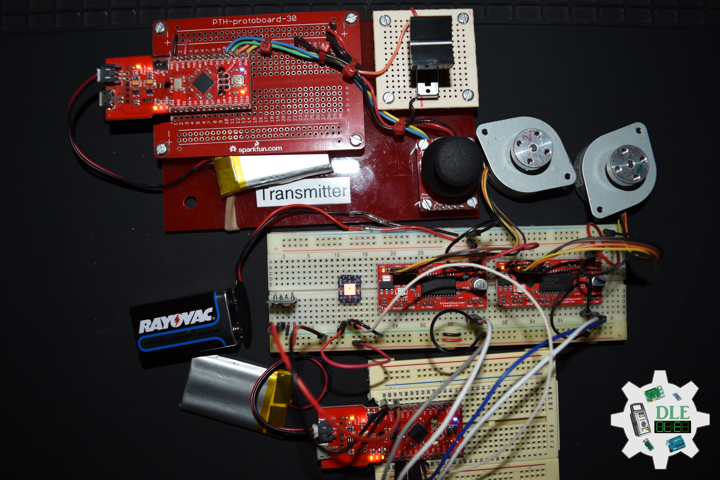
——
Stepper Motor
A stepper motor, also known as step motor or stepping motor, is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor’s position can be commanded to move and hold at one of these steps without any position sensor for feedback, as long as the motor is correctly sized to the application in respect to torque and speed. Switched reluctance motors are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.
EasyDriver – Stepper Motor Driver
The EasyDriver is a simple to use stepper motor driver, compatible with anything that can output a digital 0 to 5V pulse. The EasyDriver requires a 6V to 30V supply to power the motor and can power any voltage of stepper motor. The EasyDriver has an on board voltage regulator for the digital interface that can be set to 5V. Connect a 4-wire stepper motor and a microcontroller and you’ve got precision motor control! EasyDriver drives bi-polar motors, and motors wired as bi-polar.
DL2112Mk06
2 x Fio v3 – ATmega32U4
2 x XBee S1
2 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x RGB Smart NeoPixel
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
2 x EasyDriver
2 x Small Stepper
1 x Nine Volt Battery
1 x 9V Battery Connector
1 x Half-Size Breadboard
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2112Mk06t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - XBee S1 - Transmitter - Mk16
12-06
DL2112Mk06t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 200;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-16t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Fio v3 – ATmega32U4 – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
DR0 – Digital 2
ST0 – Digital 3
DR1 – Digital 4
ST1 – Digital 5
NEO – Digital 6
VIN – +3.3V
GND – GND
DL2112Mk06r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - EasyDriver - Mk16
12-06
DL2112Mk06r.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x RGB Smart NeoPixel
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
2 x EasyDriver
2 x Small Stepper
1 x Nine Volt Battery
1 x 9V Battery Connector
1 x Half-Size Breadboard
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// 2 x EasyDriver - 2 x Stepper
// EasyDriver Right
int dirPinR = 2;
// stepPin Right
int stepPinR = 3;
// EasyDriver Left
int dirPinL = 4;
// stepPin Left
int stepPinL = 5;
// Microsteps
int i = 0;
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
int iVer = 0;
int iHor = 0;
// NeoPixels
// On digital pin 6
#define PIN 6
// NeoPixels NUMPIXELS = 1
#define NUMPIXELS 1
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-16r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 130 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels Blue
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 2:
// NeoPixels Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 3:
// NeoPixels Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 4:
// NeoPixels Magenta
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 5:
// NeoPixels Cyan
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
case 6:
// NeoPixels White
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 255;
// Neopix
iNeo = 0;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
// Red
red = 0;
// Green
green = 0;
// Blue
blue = 0;
isNeopix();
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial1.available() > 0 )
{
// Read the incoming byte:
incb = Serial1.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
// Start
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
// End
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
// Message
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
// isStepper => Message
isStepper();
// Start - End
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper
void isStepper() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
select = SEL.toInt();
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// EasyDriver Right
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Vertical and Horizontal
if ( mapVer == -512 ) {
// Horizontal
if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Down
// NeoPixels Blue
zz = 1;
isNUMPIXELS();
iVer = 1;
}
} else if ( mapVer == 512 ) {
// Horizontal
if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Up
// NeoPixels Green
zz = 0;
isNUMPIXELS();
iVer = 4;
iVer = 2;
}
} else if ( mapHor == -512 ) {
// Left
// NeoPixels Yellow
zz = 3;
isNUMPIXELS();
iVer = 3;
} else if ( mapHor == 512 ) {
// Right
// NeoPixels Magenta
zz = 4;
isNUMPIXELS();
iVer = 4;
} else {
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
// XBee Car
switch ( iVer ) {
case 1:
// 2 x EasyDriver - Up
// Set the direction LOW
digitalWrite(dirPinR, LOW);
delay(5);
digitalWrite(dirPinL, LOW);
delay(5);
break;
case 2:
// Stepper 2 - Back
// Set the direction HIGH
digitalWrite(dirPinR, HIGH);
delay(5);
digitalWrite(dirPinL, HIGH);
delay(5);
break;
case 3:
// Stepper 3 - Right
digitalWrite(dirPinR, LOW);
delay(5);
digitalWrite(dirPinL, HIGH);
delay(5);
break;
case 4:
// Stepper 4 - Left
digitalWrite(dirPinR, HIGH);
delay(5);
digitalWrite(dirPinL, LOW);
delay(5);
break;
case 5:
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
break;
default:
// Stop
// NeoPixels Red
zz = 2;
isNUMPIXELS();
iVer = 5;
}
if ( iVer == 5 ) {
// Stepper Stop
// 2 x EasyDriver
// Set the direction
digitalWrite(dirPinR, LOW);
delay(5);
// Set the direction
digitalWrite(dirPinL, LOW);
delay(5);
// This LOW
digitalWrite(stepPinR, LOW);
digitalWrite(stepPinL, LOW);
} else {
// Iterate for 200 microsteps
for (i = 0; i<200; i++)
{
// This LOW to HIGH change is what creates the
digitalWrite(stepPinR, LOW);
// "Rising Edge" so the easydriver knows to when to step.
digitalWrite(stepPinR, HIGH);
// This delay time is close to top speed.
delayMicroseconds(iPower);
// This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW);
// "Rising Edge" so the easydriver knows to when to step.
digitalWrite(stepPinL, HIGH);
// This delay time is close to top speed.
delayMicroseconds(iPower);
}
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial1.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// 2 x EasyDriver
isStepperSetup();
// Pause
delay(5);
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// Delay for a period of time (in milliseconds)
delay(50);
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Vertical – Mk15
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #XBee #Stepper #EasyDriver #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
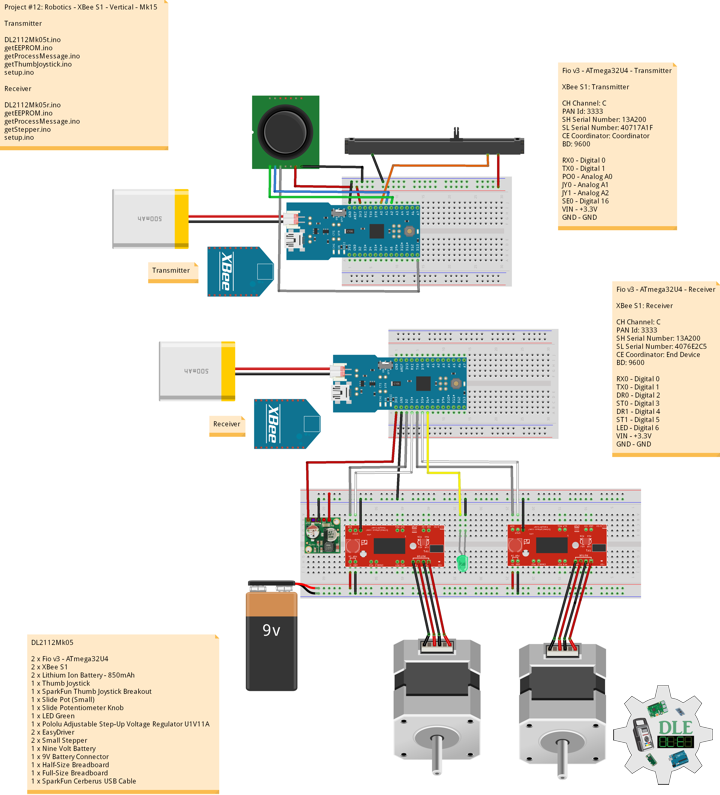
——
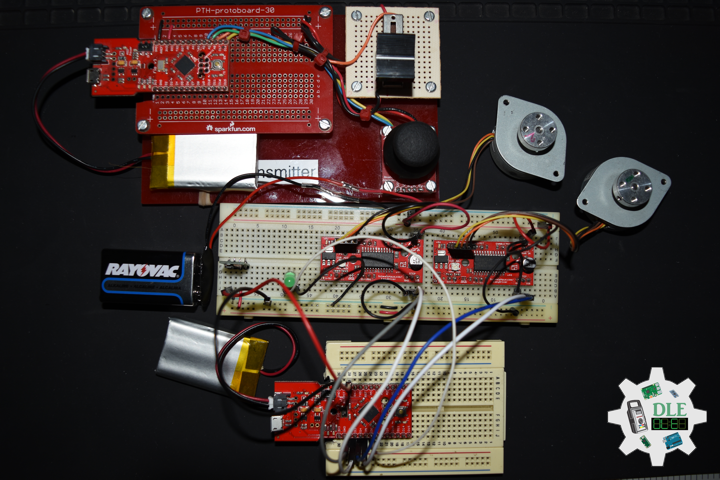
——
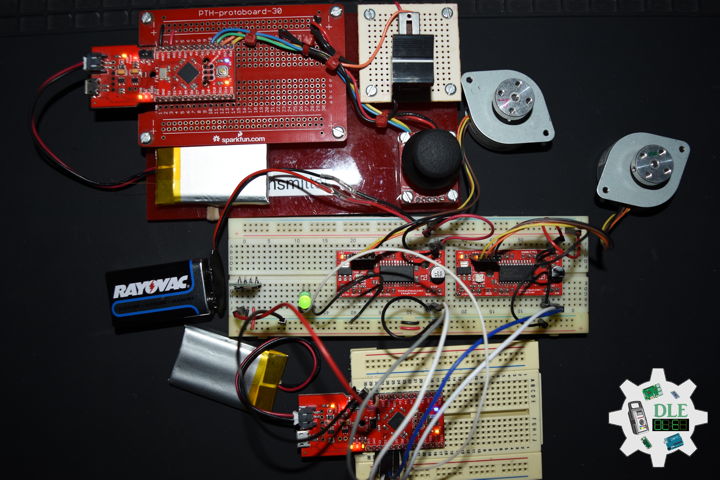
——
Joystick
A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. A joystick, also known as the control column, is the principal control device in the cockpit of many civilian and military aircraft, either as a centre stick or side-stick. It often has supplementary switches to control various aspects of the aircraft’s flight.
Pololu Adjustable Step-Up Voltage Regulator U1V11A
This compact U1V11A switching step-up voltage regulator efficiently boosts input voltages as low as 0.5 V to an adjustable output voltage between 2 V and 5.25 V. Unlike most boost regulators, the U1V11A offers a true shutdown option that turns off power to the load, and it automatically switches to a linear down-regulation mode when the input voltage exceeds the output.
DL2112Mk05
2 x Fio v3 – ATmega32U4
2 x XBee S1
2 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x LED Green
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
2 x EasyDriver
2 x Small Stepper
1 x Nine Volt Battery
1 x 9V Battery Connector
1 x Half-Size Breadboard
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
——
DL2112Mk05t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - XBee S1 - Transmitter - Mk15
12-05
DL2112Mk05t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 50;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-15t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Fio v3 – ATmega32U4 – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
DR0 – Digital 2
ST0 – Digital 3
DR1 – Digital 4
ST1 – Digital 5
LED – Digital 6
VIN – +3.3V
GND – GND
——
DL2112Mk05r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Vertical - Mk15
12-05
DL2112Mk04r.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x LED Green
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
2 x EasyDriver
2 x Small Stepper
1 x Nine Volt Battery
1 x 9V Battery Connector
1 x Half-Size Breadboard
1 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// LED Green
int iLEDGreen = 6;
// 2 x EasyDriver - 2 x Stepper
// EasyDriver Right
int dirPinR = 2;
// stepPin Right
int stepPinR = 3;
// EasyDriver Left
int dirPinL = 4;
// stepPin Left
int stepPinL = 5;
// Microsteps
int i = 0;
// Power be 0-1023
int iPower = 0;
String POW = "";
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
// Vertical
int vertical;
String VER = "";
// Horizontal
// Will be 0-1023
int horizontal;
String HOR = "";
// Select
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
int select;
String SEL = "";
int firstClosingBracket = 0;
// Map Vertical and Horizontal
int mapVer = 0;
int mapHor = 0;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-15r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial1.available() > 0 )
{
// Read the incoming byte:
incb = Serial1.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
bStart = true;
in = 0;
msg = "";
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
msg = msg + char(incb);
in++;
//Serial.println( msg );
}
}
// Start - End
if( bStart && bEnd)
{
// isStepper => msg
isStepper();
digitalWrite(iLEDGreen, HIGH);
in = 0;
msg = "";
bStart = false;
bEnd = false;
vertical;
horizontal;
iPower;
}
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper
void isStepper() {
// msg = vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid
firstClosingBracket = 0;
// Vertical
firstClosingBracket = msg.indexOf('|');
VER = msg;
VER.remove(firstClosingBracket);
vertical = VER.toInt();
// Horizontal
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
HOR = msg;
HOR.remove(firstClosingBracket);
horizontal = HOR.toInt();
// Select
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
SEL = msg;
SEL.remove(firstClosingBracket);
// Power
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
POW = msg;
POW.remove(firstClosingBracket);
iPower = POW.toInt();
// EasyDriver Right
// Set the direction
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
mapVer = map(vertical, 0, 1023, -512, 512);
mapHor = map(horizontal, 0, 1023, -512, 512);
// Vertical
if ( mapVer <= 12 ) {
// Set the direction HIGH
digitalWrite(dirPinR, HIGH);
delay(5);
digitalWrite(dirPinL, HIGH);
delay(5);
} else {
// Set the direction LOW
digitalWrite(dirPinR, LOW);
delay(5);
digitalWrite(dirPinL, LOW);
delay(5);
}
// Iterate for 200 microsteps
for (i = 0; i<200; i++)
{
// This LOW to HIGH change is what creates the
digitalWrite(stepPinR, LOW);
// "Rising Edge" so the easydriver knows to when to step.
digitalWrite(stepPinR, HIGH);
// This delay time is close to top speed.
delayMicroseconds(iPower);
// This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW);
// "Rising Edge" so the easydriver knows to when to step.
digitalWrite(stepPinL, HIGH);
// This delay time is close to top speed.
delayMicroseconds(iPower);
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial1.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// 2 x EasyDriver
isStepperSetup();
// Pause
delay(5);
// LED Green
pinMode(iLEDGreen, OUTPUT);
digitalWrite(iLEDGreen, LOW);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – Transmitter and Receiver – Mk14
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #XBee #XBeeS1 #Transmitter #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
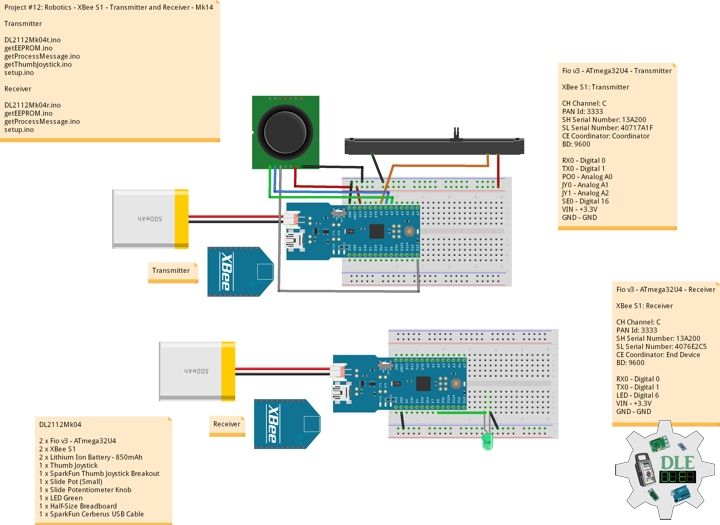
——
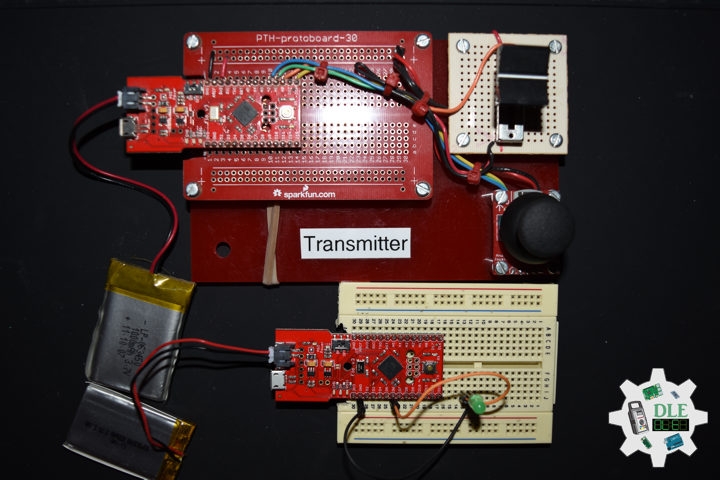
——
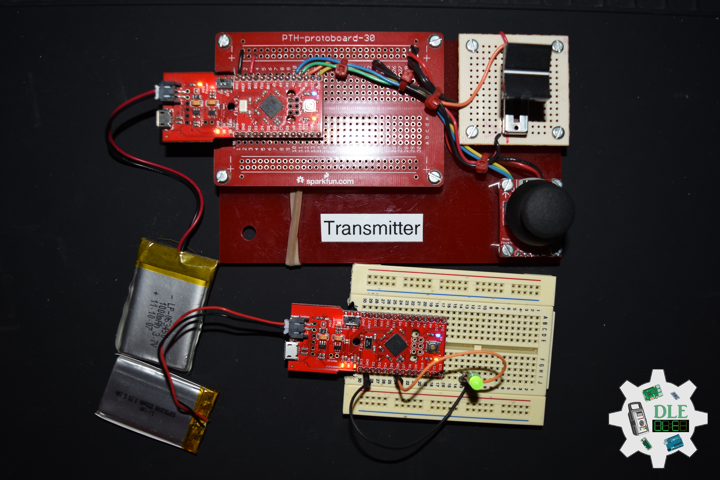
——
Serial
Used for communication between the Arduino board and a computer or other devices. All Arduino boards have at least one serial port, and some have several. Fio v3 ATmega32U4 board, Serial1 pins, 0(RX), 1(TX). On Fio v3 ATmega32U4, pins 0 and 1 are used for communication with the computer. Connecting anything to these pins can interfere with that communication, including causing failed uploads to the board. You can use the Arduino environment’s built-in serial monitor to communicate with an Arduino board. Click the serial monitor button in the toolbar and select the same baud rate used in the call to begin(). Serial communication on pins TX/RX uses TTL logic levels 3.3V . Don’t connect these pins directly to an RS232 serial port, they operate at +/- 12V and can damage your Arduino board.
DL2112Mk04
2 x Fio v3 – ATmega32U4
2 x XBee S1
2 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x LED Green
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4 – Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2112Mk04t.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - XBee S1 - Transmitter - Mk14
12-04
DL2112Mk04t.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 50;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-14t";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial1.print( '<' );
Serial1.print( vertical );
Serial1.print( '|' );
Serial1.print( horizontal );
Serial1.print( '|' );
Serial1.print( select );
Serial1.print( '|' );
Serial1.print( iPower );
Serial1.print( '|' );
Serial1.print( sver );
Serial1.print( '|' );
Serial1.print( uid );
Serial1.println( '*' );
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open Serial1 port at 9600 baud
Serial1.begin( 9600 );
// Pause
delay(5);
}
——
Fio v3 – ATmega32U4 – Receiver
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
RX0 – Digital 0
TX0 – Digital 1
LED – Digital 6
VIN – +3.3V
GND – GND
DL2112Mk04r.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - Receiver - Mk14
12-04
DL2112Mk04r.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x LED Green
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// LED Green
int iLEDGreen = 6;
// Process Message
// Start
bool bStart = false;
// End
bool bEnd = false;
// Variable to store the incoming byte
int incb = 0;
// Message
String msg = "";
// Index
byte in = 0;
int x = 0;
// Software Version Information
String sver = "12-14r";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
isProcessMessage();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial1.available() > 0 )
{
// Read the incoming byte:
incb = Serial1.read();
// Start the message when the '<' symbol is received
if(incb == '<')
{
bStart = true;
in = 0;
msg = "";
// Done reading
}
// End the message when the '*' symbol is received
else if(incb == '*')
{
bEnd = true;
x = msg.length();
msg.remove( x , 1);
// Done reading
break;
}
// Read the message
else
{
msg = msg + char(incb);
in++;
}
}
// Start - End
if( bStart && bEnd)
{
digitalWrite(iLEDGreen, HIGH);
in = 0;
msg = "";
bStart = false;
bEnd = false;
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial1.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// LED Green
pinMode(iLEDGreen, OUTPUT);
digitalWrite(iLEDGreen, LOW);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – XBee S1 – Transmitter – Mk13
——
#DonLucElectronics #DonLuc #Robotics #Arduino #Fio #FioV3ATmega32U4 #XBeeS1 #Transmitter #ThumbJoystick #SlidePot #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
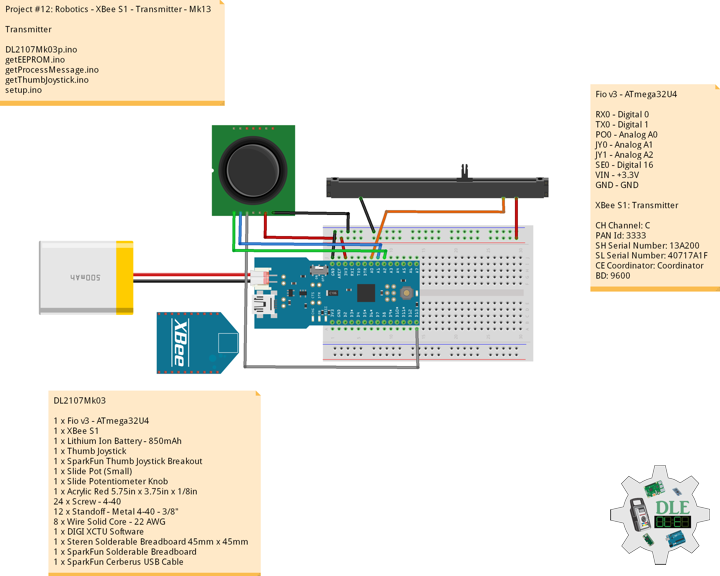
——
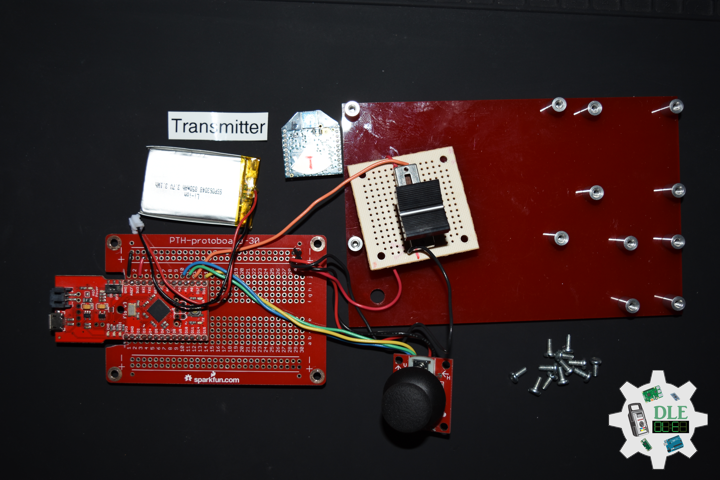
——
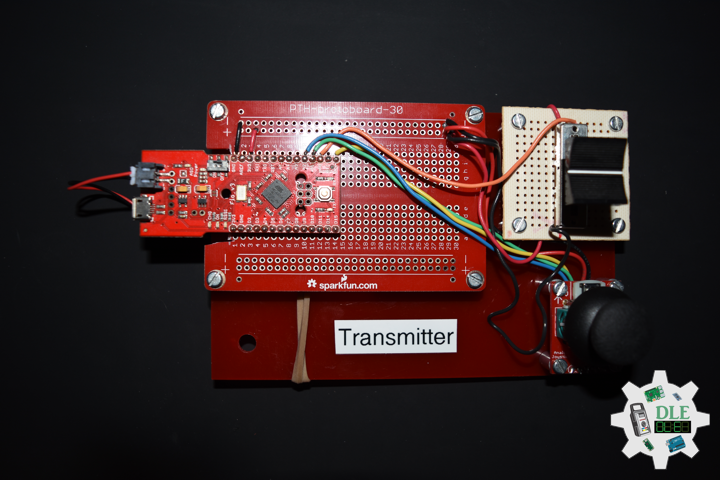
——
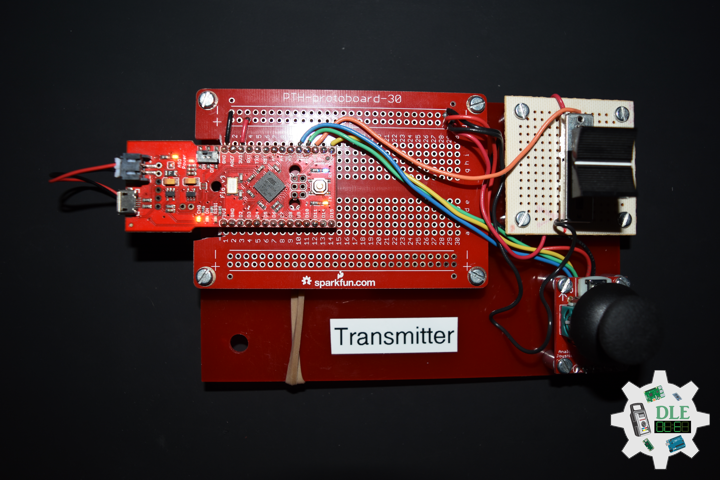
——
Fio v3 – ATmega32U4
The Fio v3 is a new spin on the Arduino Fio hardware powered by the ATmega32U4.Not only is it small and LiPo-ready, it’s a very capable XBee-ready development board. The JST-connector and 3.3v system voltage make this a great development tool for portable devices, simply plug in a Li-Poly battery and you’re ready to go. Wireless sensor networks and communication are made easy by the on-board XBee socket.
The ATmega32U4, running at 8MHz, makes it possible for you to use the on-board USB jack not only to charge a connected Li-Poly battery but to actually program the device. Because this board uses a similar bootloader to the one on the Pro Micro, you will need to download and install the special software driver below. There’s also a board definition add-on for the Arduino IDE which will add support for this board.
Transmitter
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
DL2107Mk03
1 x Fio v3 – ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery – 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x Acrylic Red 5.75in x 3.75in x 1/8in
24 x Screw – 4-40
12 x Standoff – Metal 4-40 – 3/8″
8 x Wire Solid Core – 22 AWG
1 x DIGI XCTU Software
1 x Steren Solderable Breadboard 45mm x 45mm
1 x SparkFun Solderable Breadboard
1 x SparkFun Cerberus USB Cable
Fio v3 – ATmega32U4
RX0 – Digital 0
TX0 – Digital 1
PO0 – Analog A0
JY0 – Analog A1
JY1 – Analog A2
SE0 – Digital 16
VIN – +3.3V
GND – GND
DL2107Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - XBee S1 - Transmitter - Mk13
07-03
DL2107Mk03p.ino
1 x Fio v3 - ATmega32U4
1 x XBee S1
1 x Lithium Ion Battery - 850mAh
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Slide Pot (Small)
1 x Slide Potentiometer Knob
1 x Acrylic Red 5.75in x 3.75in x 1/8in
24 x Screw - 4-40
12 x Standoff - Metal 4-40 - 3/8"
8 x Wire Solid Core - 22 AWG
1 x DIGI XCTU Software
1 x Steren Solderable Breadboard 45mm x 45mm
1 x SparkFun Solderable Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Communication
unsigned long dTime = 50;
// Slide Pot (Small)
// Select the input pin for the slide pot
// Power
const int iSP1 = A0;
// Power to store the value
int iPower = 0;
// Connections to joystick
// Vertical
const int VERT = A1;
// Horizontal
const int HORIZ = A2;
// Pushbutton
const int SEL = 16;
// Initialize variables for analog and digital values
int vertical;
int horizontal;
int select;
// Software Version Information
// Version
String sver = "12-13";
// Unit ID Information
// UID
String uid = "";
void loop()
{
// Thumb Joystick
isThumbJoystick();
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// is UID
void isUID()
{
// Is Unit ID
// UID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// Process Message
// isProcessMessage
void isProcessMessage() {
// Loop through serial buffer
while ( Serial.available() )
{
// Print = "<" + vertical + "|" + horizontal + "|" + select + "|" + iValue + "|" + sver + "|" + uid + "*"
Serial.print( '<' );
Serial.print( vertical );
Serial.print( '|' );
Serial.print( horizontal );
Serial.print( '|' );
Serial.print( select );
Serial.print( '|' );
Serial.print( iPower );
Serial.print( '|' );
Serial.print( sver );
Serial.print( '|' );
Serial.print( uid );
Serial.println( '*' );
}
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Read all values from the joystick
// Joystick was sitting around 520 for the vertical and horizontal values
// Will be 0-1023
vertical = analogRead(VERT);
// Will be 0-1023
horizontal = analogRead(HORIZ);
// Will be HIGH (1) if not pressed, and LOW (0) if pressed
select = digitalRead(SEL);
// Read the value
// Power be 0-1023
iPower = analogRead( iSP1 );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Make the SEL line an input
pinMode(SEL, INPUT_PULLUP);
// Open serial port at 9600 baud
Serial.begin( 9600 );
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #14: Components – SparkFun XBee Explorer Regulated – Mk05
——
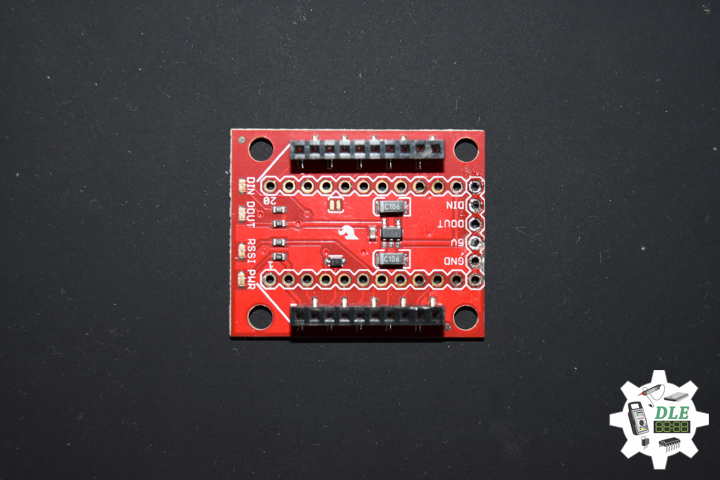
——
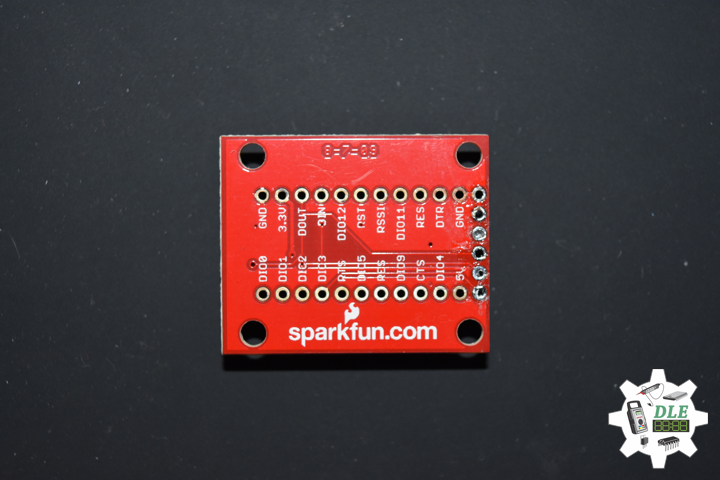
——
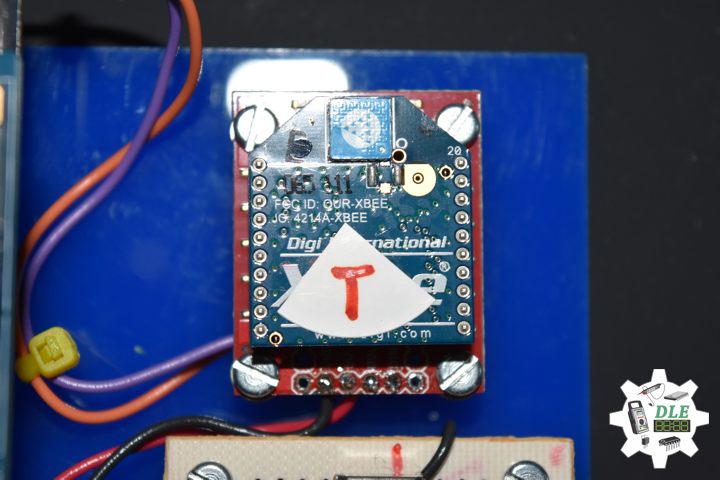
——
SparkFun XBee Explorer Regulated
SparkFun Item: WRL-11373
The SparkFun XBee Explorer Regulated takes care of the 3.3V regulation, signal conditioning, and basic activity indicators. It translates the 5V serial signals to 3.3V so that you can connect a 5V (down to 3.3V) system to any XBee module. The board was conveniently designed to mate directly with the SparkFun Arduino Pro series of boards for wireless bootloading and USB based configuration.
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc