——
#DonLucElectroniRcs #DonLuc #AIFaceRecognition #UNIHIKER #Display #IoT #Project #DFRobot #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
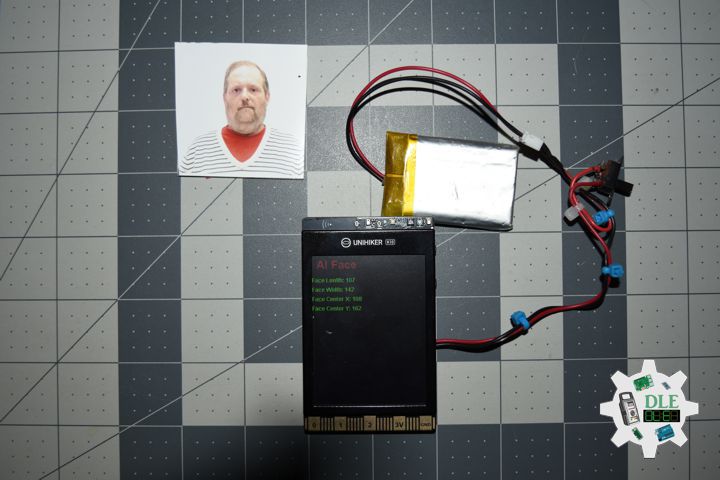
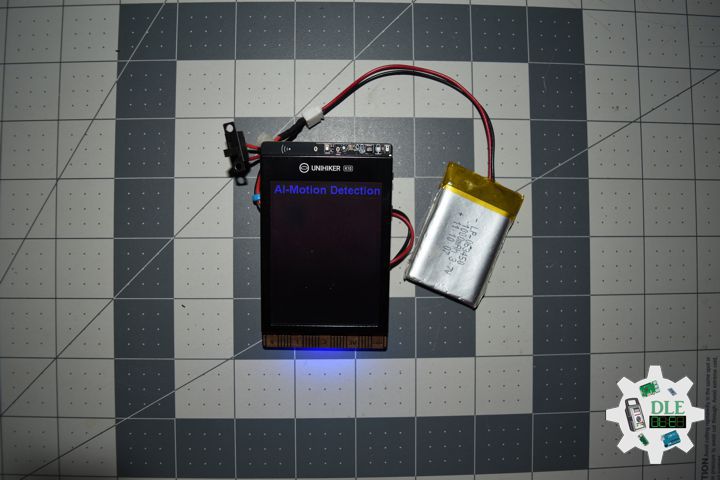
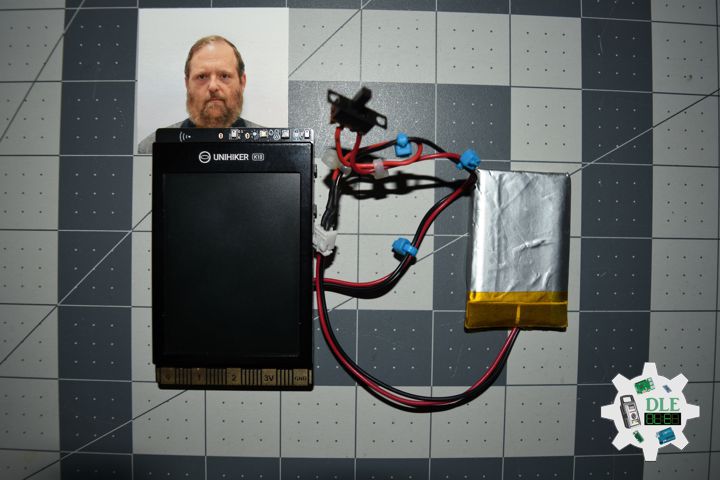
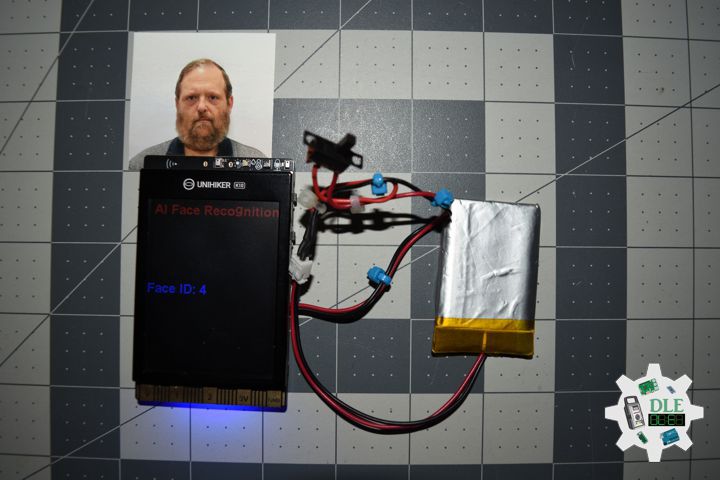
AI-Face Recognition
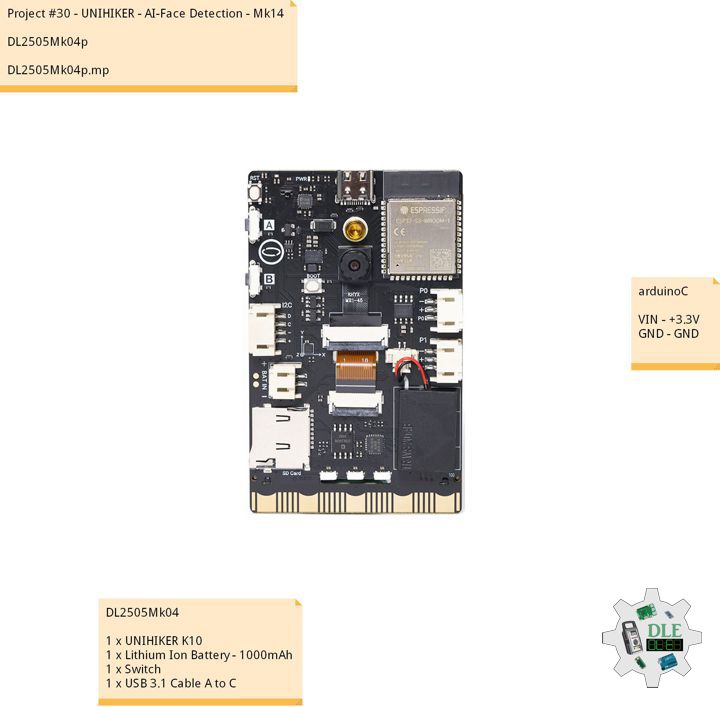
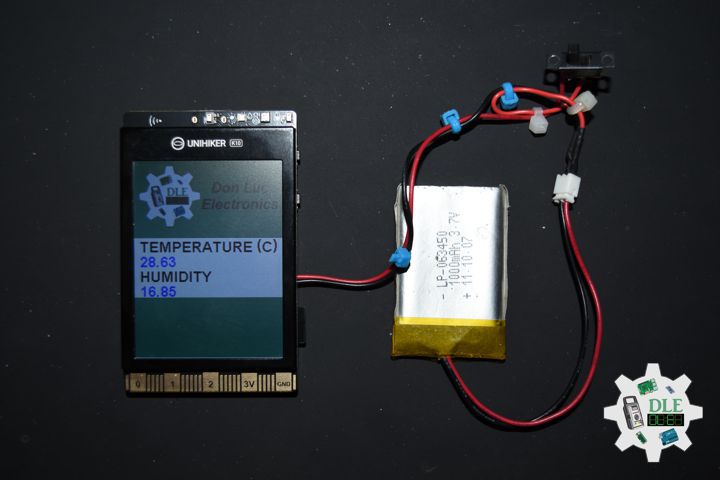
AI face recognition uses artificial intelligence and machine learning algorithms to identify individuals based on their facial features. Press button A to learn the face and green LED on; press button B to recognize the face and blue LED on, and display the recognized face ID on the K10 screen.
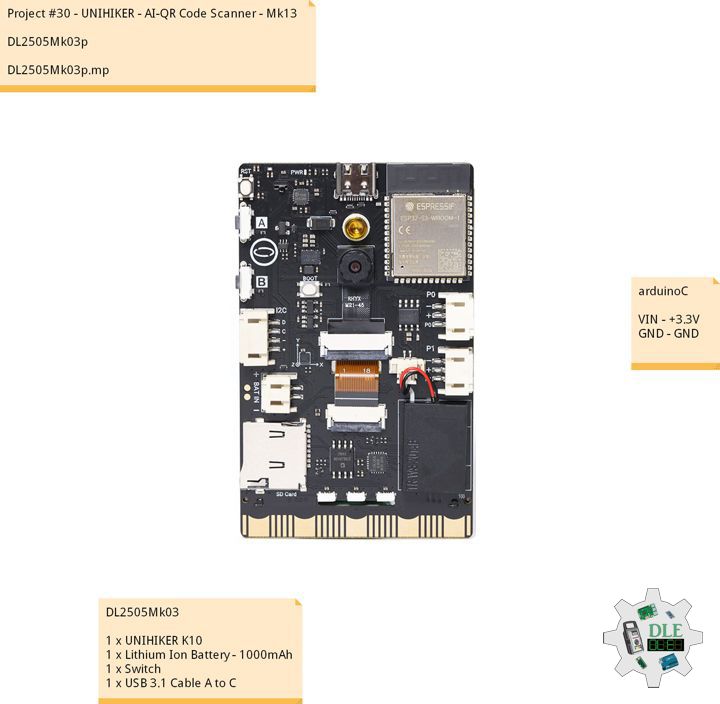
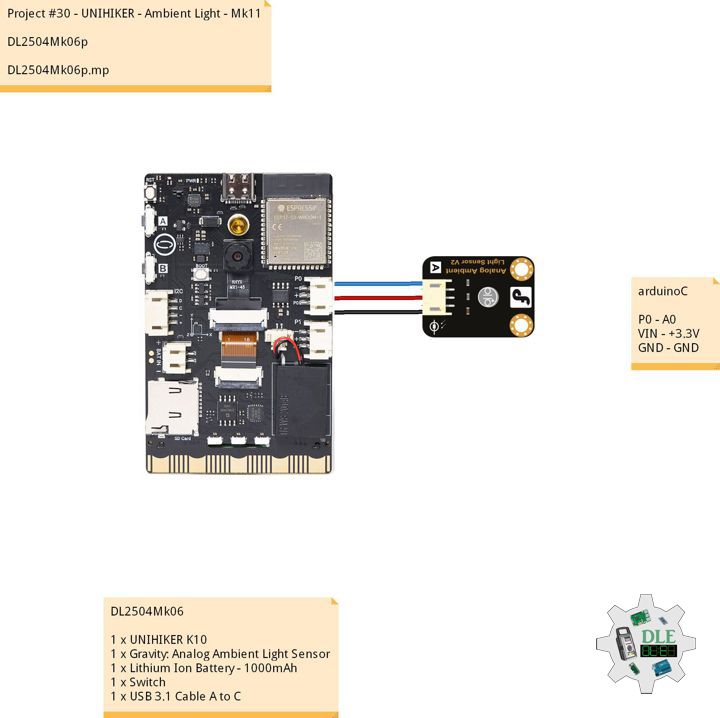
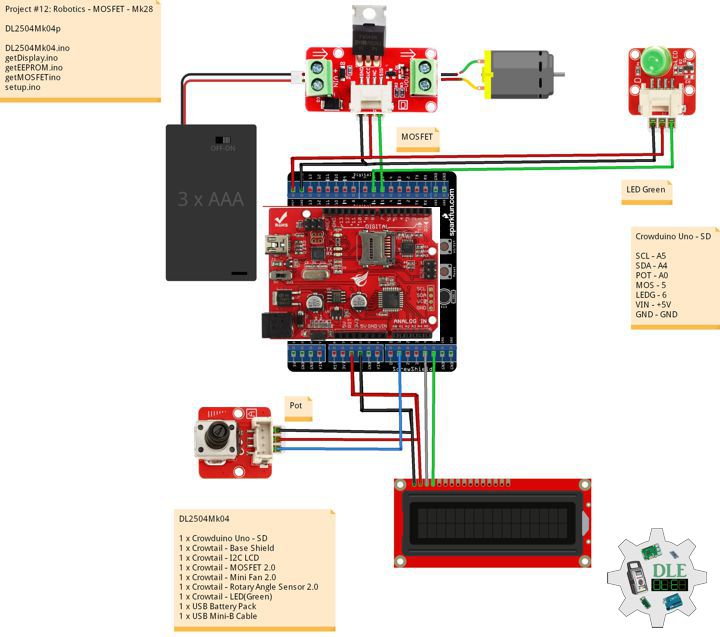
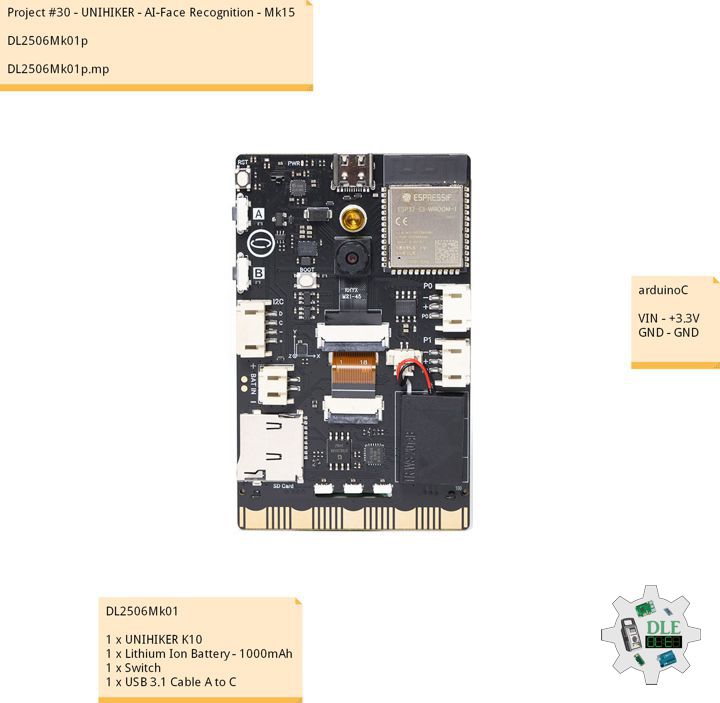
DL2506Mk01
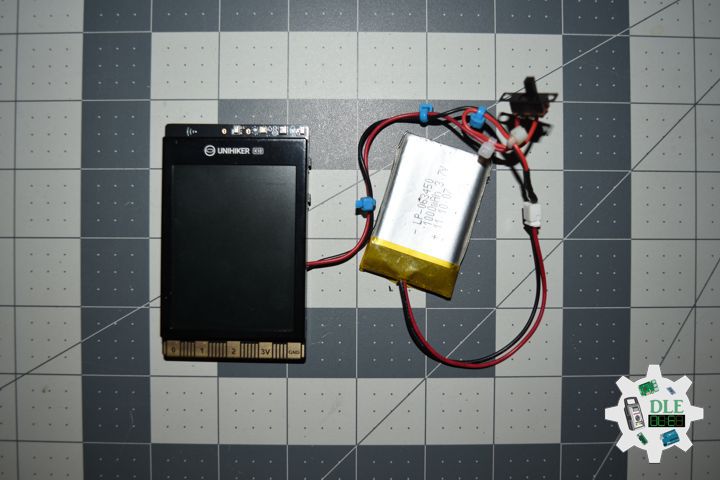
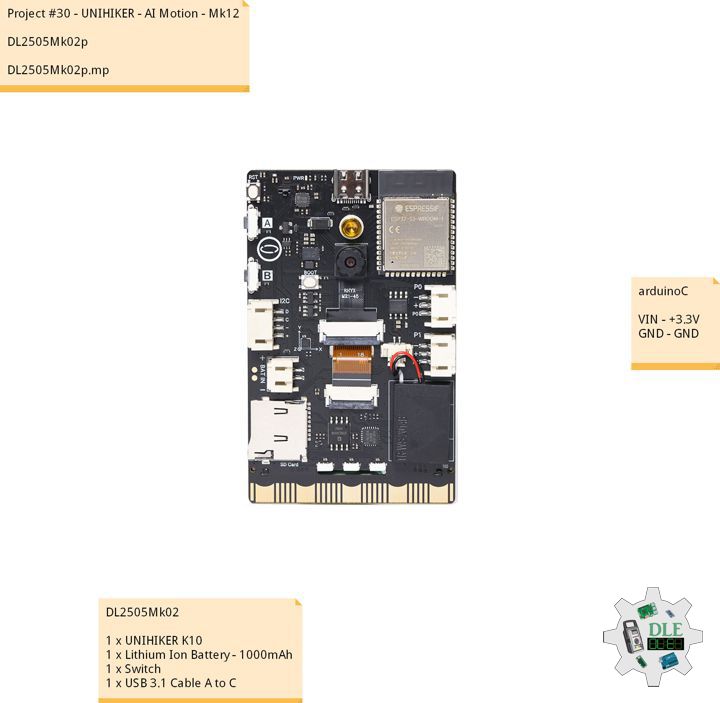
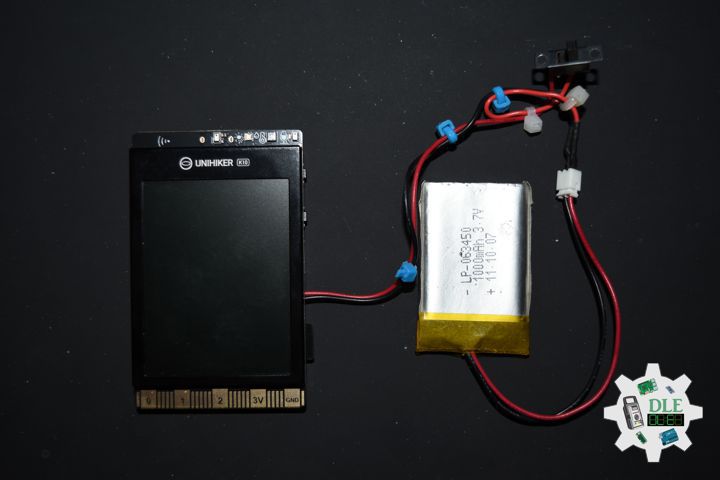
1 x UNIHIKER K10
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
DL2506Mk01p
DL2506Mk01p.mp
/****** Don Luc Electronics © ******
Software Version Information
Project #30 - UNIHIKER - AI-Face Recognition - Mk15
DL2506Mk01p.mp
DL2506Mk01
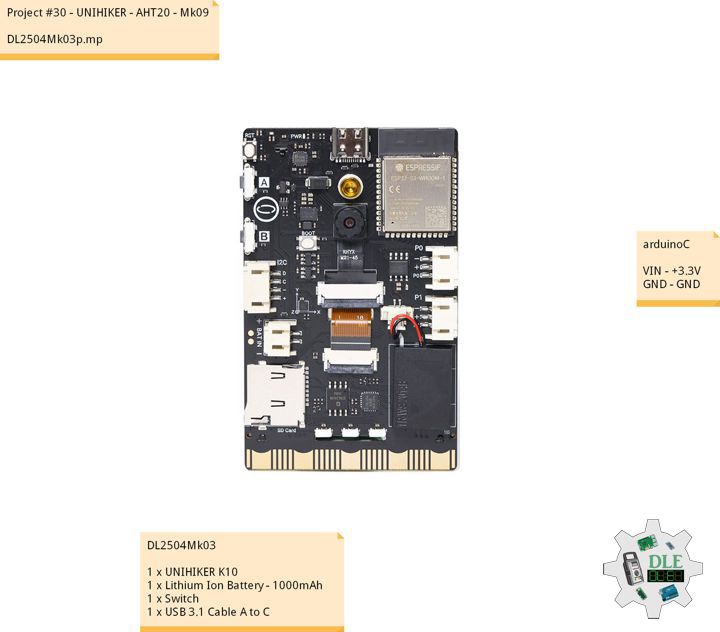
1 x UNIHIKER K10
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Unihiker K10
#include "unihiker_k10.h"
// AT Recognition
#include "AIRecognition.h"
// Dynamic variables
// ID
String mind_s_ID;
// Function declaration
// Button A Pressed
void onButtonAPressed();
// Button B Pressed
void onButtonBPressed();
// Create an object
UNIHIKER_K10 k10;
// Screen
uint8_t screen_dir=2;
// AI Recognition
AIRecognition ai;
// Main program start
void setup() {
// Begin
k10.begin();
// Init Screen
k10.initScreen(screen_dir);
// Init AI
ai.initAi();
// Init Camera Imager
k10.initBgCamerImage();
// Set Camera Imager
k10.setBgCamerImage(false);
// Canver
k10.creatCanvas();
// Switch AI Mode
ai.switchAiMode(ai.NoMode);
// Button A
k10.buttonA->setPressedCallback(onButtonAPressed);
// // Button B
k10.buttonB->setPressedCallback(onButtonBPressed);
// Set Camera Image
k10.setBgCamerImage(true);
// Caver Text
k10.canvas->canvasText("AI Face Recognition", 1, 0xFF0000);
// Switch AI Mode
ai.switchAiMode(ai.Face);
}
// Loop
void loop() {
// Detect Content AI Recognized
if (ai.isRecognized()) {
// ID
mind_s_ID = ai.getRecognitionID();
?? Face ID
k10.canvas->canvasText((String("Face ID: ") + String(mind_s_ID)), 0, 150, 0x0000FF, k10.canvas->eCNAndENFont24, 50, true);
// Update Canvas
k10.canvas->updateCanvas();
}
// Delay
delay(3000);
}
// Event callback function
// Button A Pressed
void onButtonAPressed() {
// RGB Write
k10.rgb->write(-1, 0x00FF00);
// Send Face
ai.sendFaceCmd(ENROLL);
}
// Button B Pressed
void onButtonBPressed() {
// RGB Write
k10.rgb->write(-1, 0x0000FF);
// Send Face
ai.sendFaceCmd(RECOGNIZE);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc