——
#DonLucElectronics #DonLuc #Time #IMU #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——

——
——
IMU
Accelerometers, gyroscopes and magnetometer are great, but alone they don’t give you quite enough information to be able to comfortably calculate things like orientation, position, and velocity. To measure those and other variables many people combine the two sensors, to create an inertial measurement unit (IMU) which provides two to nine degrees of freedom (DOF). IMUs are widely used in devices that require knowledge of their exact position, for example robotic arms, guided missiles, and tools used in the study of body motion.
IMUs can really be broken down into two classes: simple IMU combo boards, which just mount an accelerometer, gyroscopes and magnetometer onto a single PCB, and more complex units that interface a microcontroller with the sensors to produce a serial output. If you’ve glanced over the previous sections, you should know what kind of specifications to be looking for in IMUs: the number of axes (both for the accelerometer, gyroscopes and magnetometer), the measuring range of the sensors, and the interface.
Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
The Pololu MinIMU-9 v5 is an inertial measurement unit (9DoF IMU) that packs an LSM6DS33 3-axis gyro and 3-axis accelerometer and an LIS3MDL 3-axis magnetometer onto a tiny board. An I²C interface accesses nine independent rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s absolute orientation. The MinIMU-9 v5 board includes a voltage regulator and a level-shifting circuit that allow operation from 2.5 to 5.5 V, and the pin spacing makes it easy to use with standard solderless breadboards and perfboards.
STMicroelectronics LSM6DS33
The LSM6DS33 is a system-in-package featuring a 3D digital accelerometer and a 3D digital gyroscope performing at 1.25 mA in high-performance mode and enabling always-on low-power features for an optimal motion experience for the consumer. ST’s family of MEMS sensor modules leverages the robust and mature manufacturing processes already used for the production of micromachined accelerometers and gyroscopes.
STMicroelectronics LIS3MDL
The LIS3MDL is an ultra-low-power high-performance three-axis magnetic sensor. The LIS3MDL has user-selectable full scales of gauss. The self-test capability allows the user to check the functioning of the sensor in the final application. The device may be configured to generate interrupt signals for magnetic field detection.
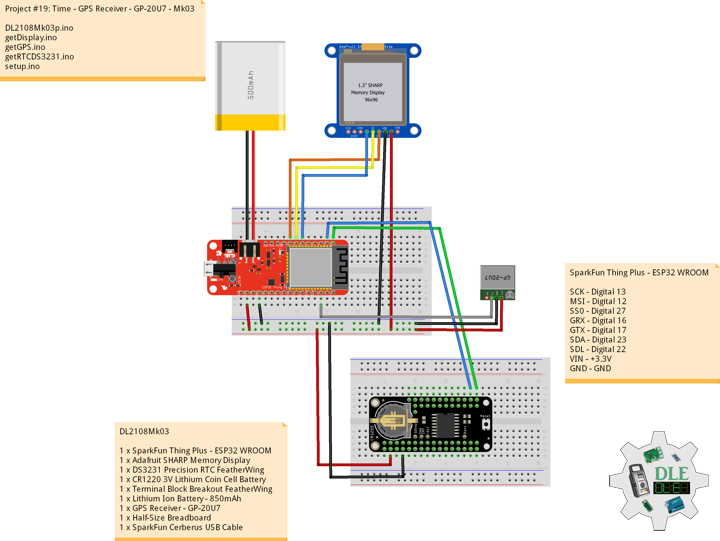
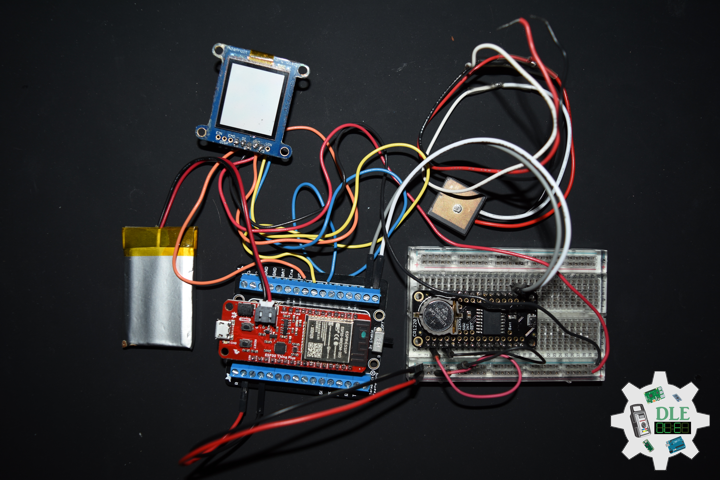
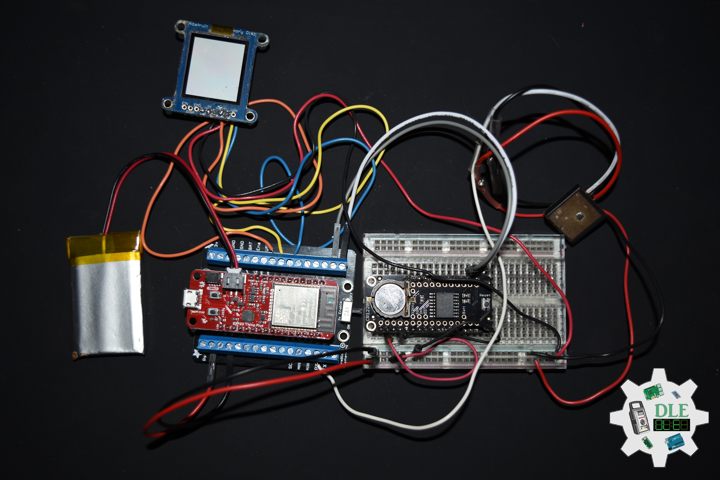
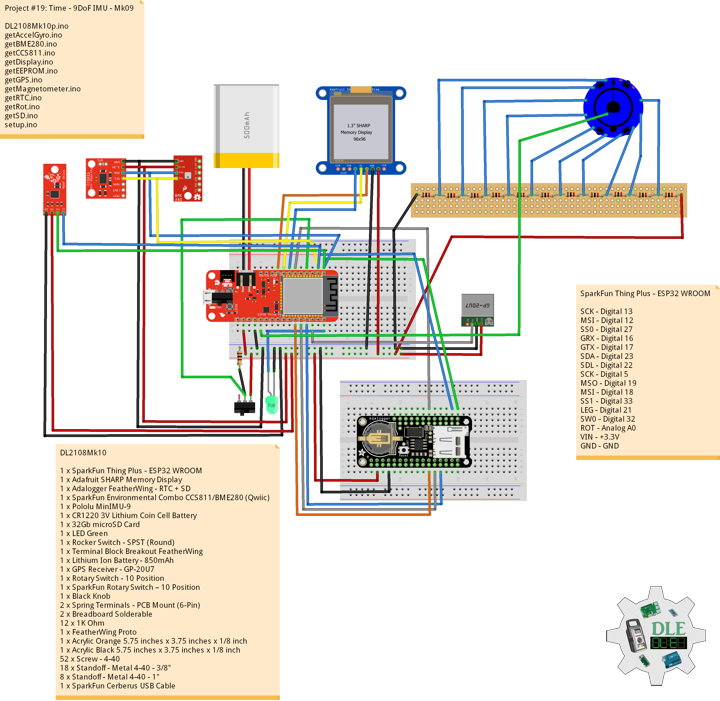
DL2108Mk10
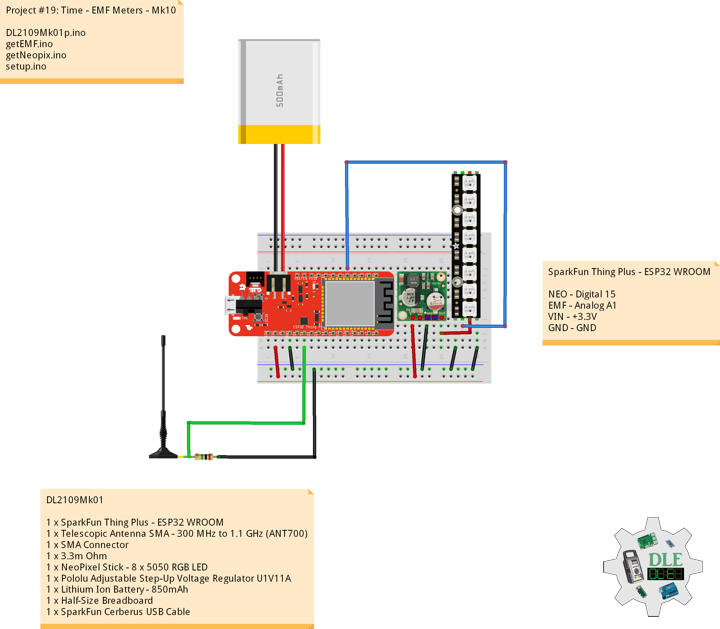
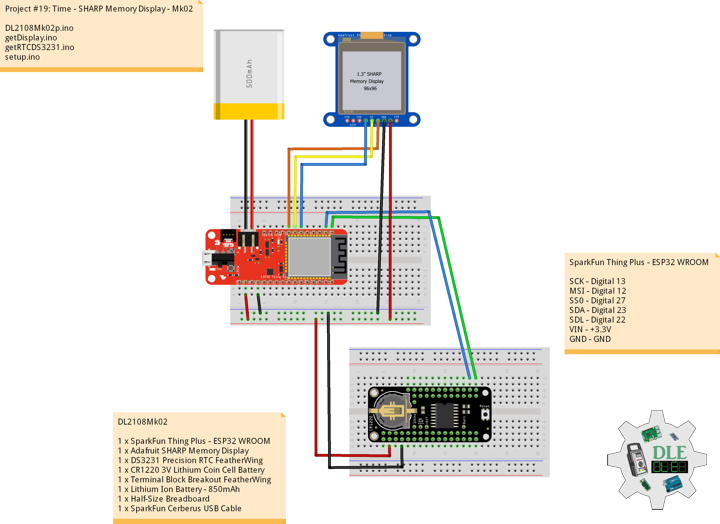
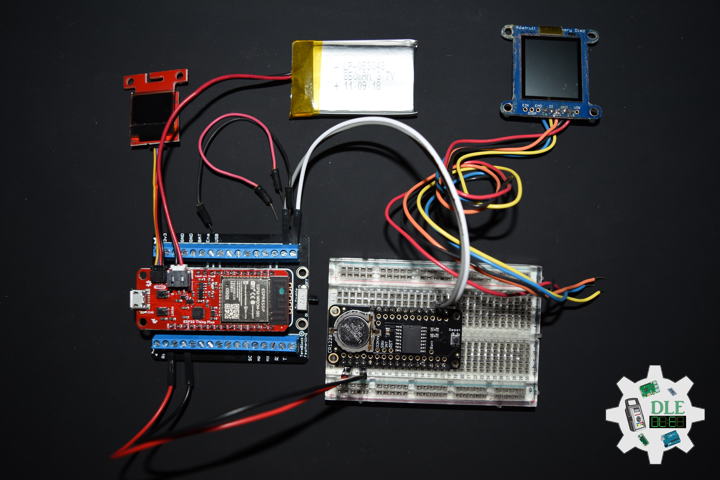
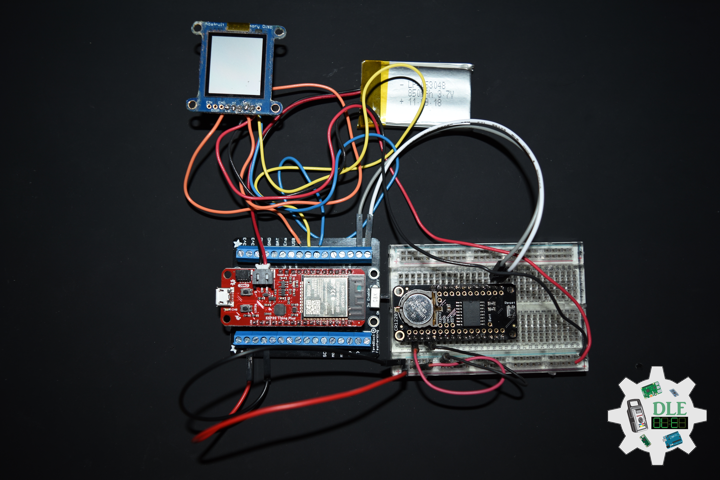
1 x SparkFun Thing Plus – ESP32 WROOM
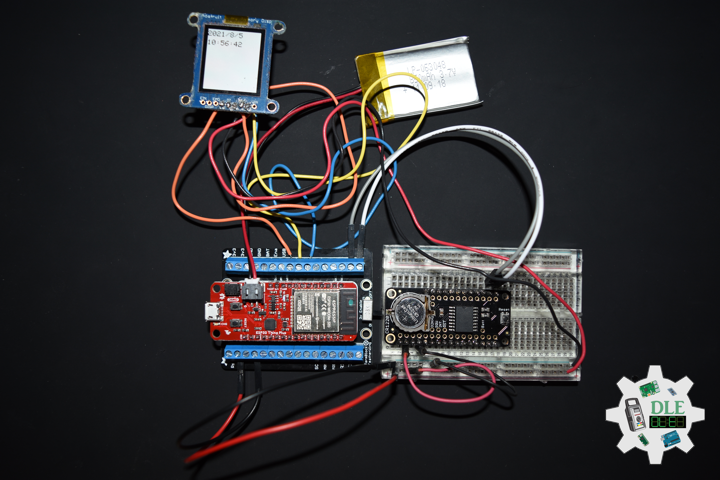
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Pololu MinIMU-9
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
54 x Screw – 4-40
19 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
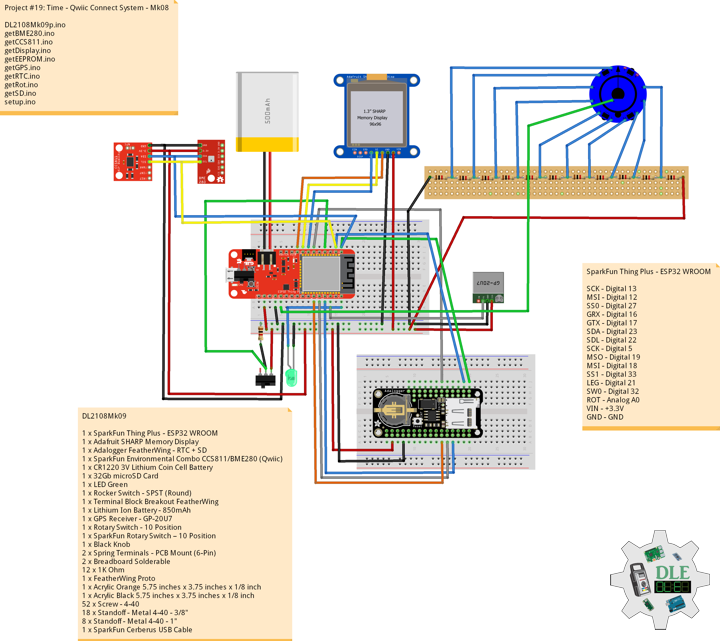
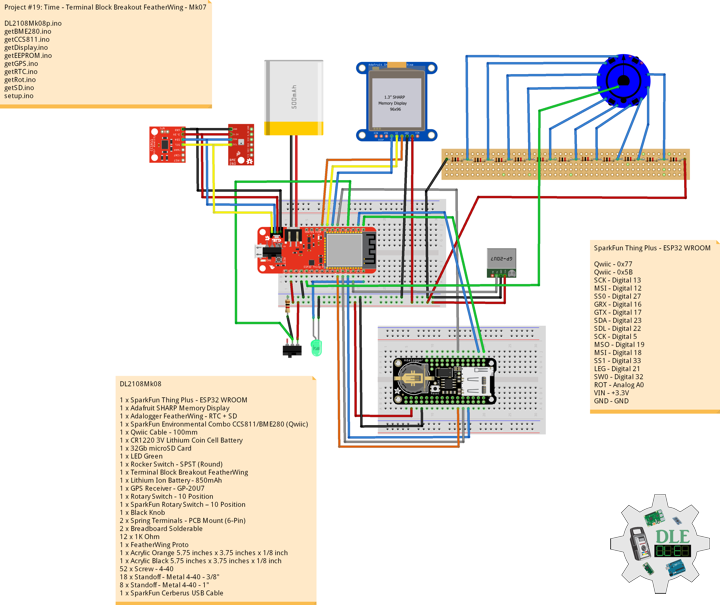
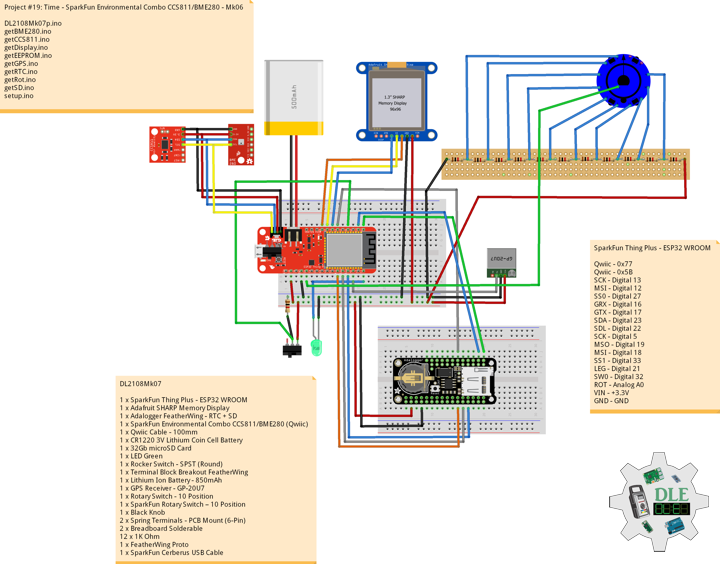
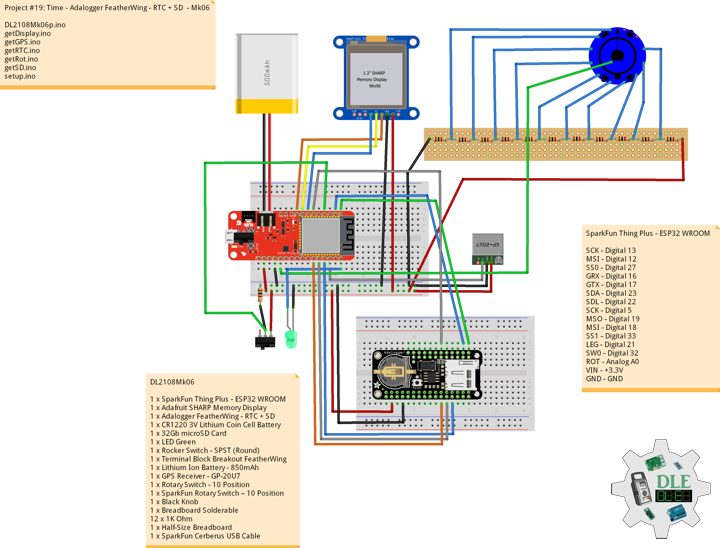
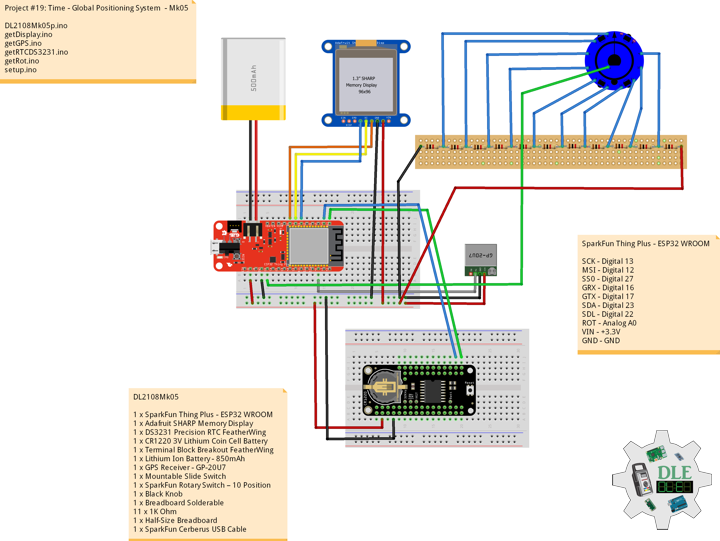
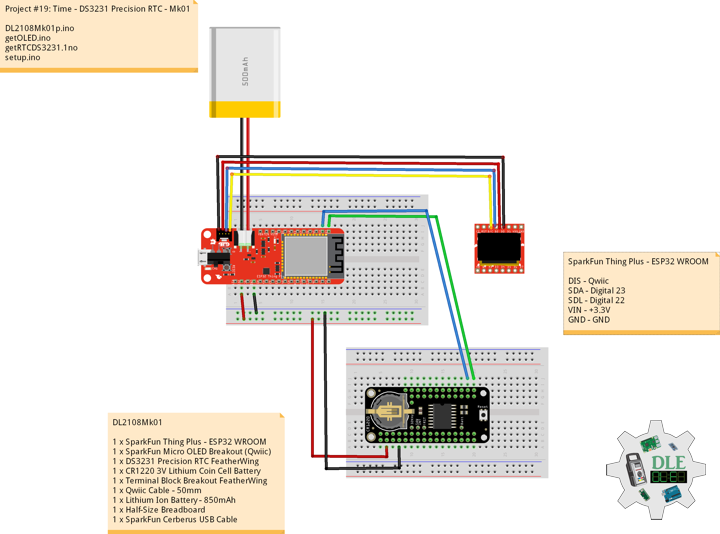
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
——
DL2108Mk10p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - 9DoF IMU - Mk09
08-10
DL2108Mk10p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Pololu MinIMU-9
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
54 x Screw - 4-40
19 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// 9DoF IMU
// STMicroelectronics LSM6DS33
#include <LSM6.h>
// STMicroelectronics LIS3MDL
#include <LIS3MDL.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// 9DoF IMU
// STMicroelectronics LSM6DS33
LSM6 imu;
// // Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-09";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
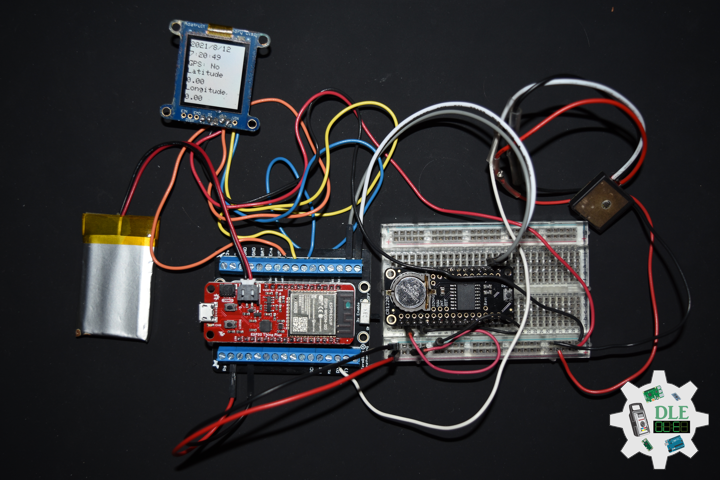
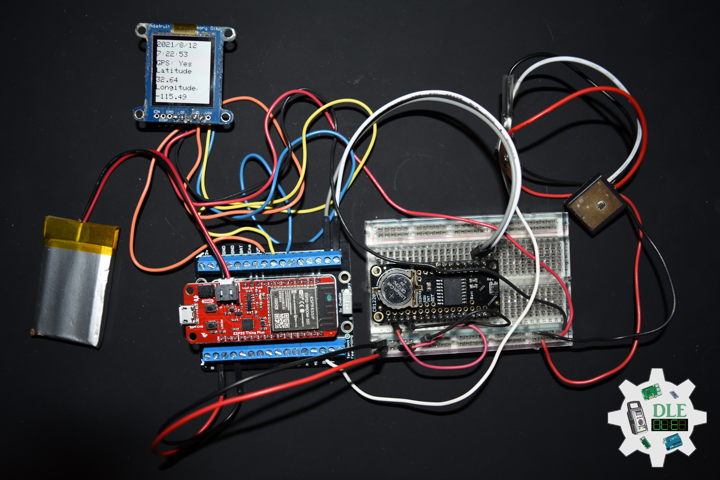
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,5);
display.println( "Temperature" );
display.setCursor(0,25);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,45);
display.println( "Humidity" );
display.setCursor(0,65);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,85);
display.println( "Altitude M" );
display.setCursor(0,105);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,125);
display.println( "Barometric" );
display.setCursor(0,145);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,5);
display.println( "eCO2" );
display.setCursor(0,25);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,55);
display.println( "tVOC" );
display.setCursor(0,75);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Accelerometer and Gyroscopes
void isDisplayAccGyr() {
// Text Display Accelerometer and Gyroscopes
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Accelerometer
display.setCursor(0,5);
display.println( "Accelero" );
display.setCursor(0,25);
display.print( "X: " );
display.println( imuAX );
display.setCursor(0,45);
display.print( "Y: " );
display.println( imuAY );
display.setCursor(0,65);
display.print( "Z: " );
display.println( imuAZ );
display.setCursor(0,85);
display.println( "Gyro" );
display.setCursor(0,105);
display.print( "X: " );
display.println( imuGX );
display.setCursor(0,125);
display.print( "Y: " );
display.println( imuGY );
display.setCursor(0,145);
display.print( "Z: " );
display.println( imuGZ );
// Refresh
display.refresh();
delay( 100 );
}
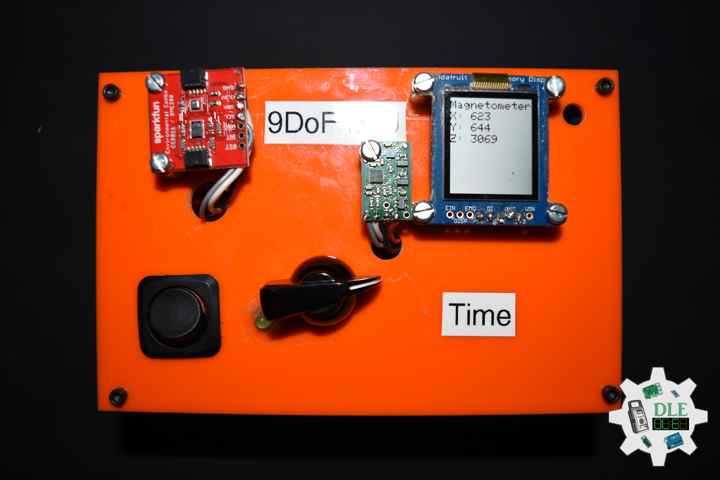
// Display Magnetometer
void isDisplayMag() {
// Text Display Magnetometer
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Magnetometer
display.setCursor(0,5);
display.println( "Magnetometer" );
display.setCursor(0,25);
display.print( "X: " );
display.println( magX );
display.setCursor(0,45);
display.print( "Y: " );
display.println( magY );
display.setCursor(0,65);
display.print( "Z: " );
display.println( magZ );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Accelerometer and Gyroscopes
isDisplayAccGyr();
break;
case 8:
// Display Magnetometer
isDisplayMag();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude
//|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|Accelerometer X|Accelerometer Y|Accelerometer Z|
//Gyroscopes X|Gyroscopes Y|Gyroscopes Z|Magnetometer X|Magnetometer Y|Magnetometer Z|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" +
TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|"
+ CCS811TVOC + "|" + imuAX + "|" + imuAY + "|" + imuAZ + "|" + imuGX + "|" + imuGY + "|" + imuGZ + "|" + magX + "|" + magY + "|" + magZ + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc