——
#DonLucElectronics #DonLuc #MiniMP3Player #IoT #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
Mini MP3 Player
Mini MP3 Player is a compact and inexpensive MP3 module that can be connected directly to the speaker. The module can be used alone with a battery power supply, speaker, and keypad, or through the serial port control, as the Arduino UNO compatible board or any microcontroller with a serial port module. The module itself perfectly integrated hardware decodes MP3, WAV, and WMA’s. The software supports TF card drivers to support FAT16, FAT32 file systems. This can be done by the simple serial command that plays the specified music, as well as how to play music and other functions, easy to use, stable and reliable.
Play next MP3 every 8 second.
1.mp3 – William Shakespeare
2.mp3 – Albert Einstein
3.mp3 – Luc Paquin
4.mp3 – Carl Sagan
5.mp3 – Dalek
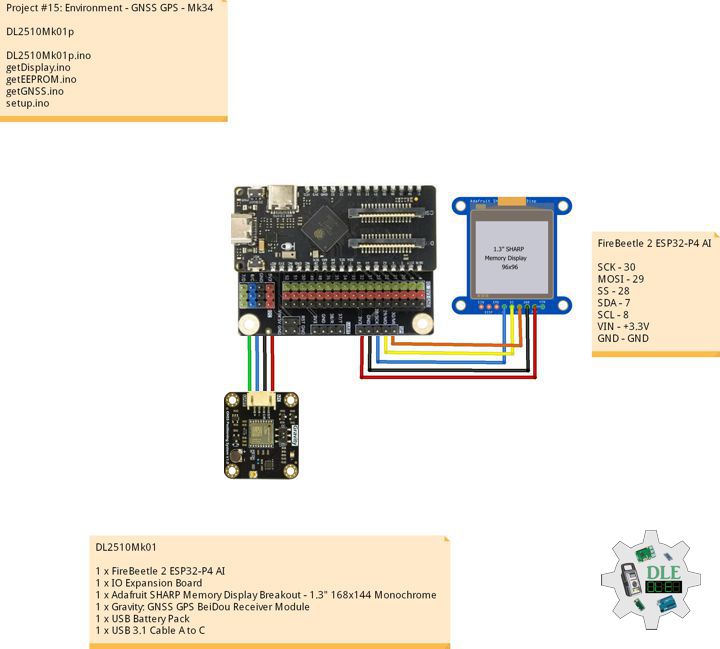
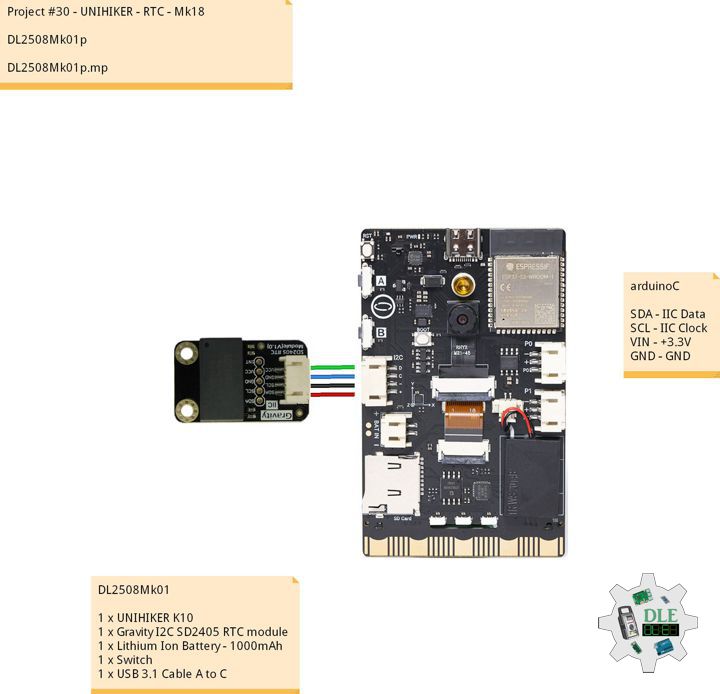
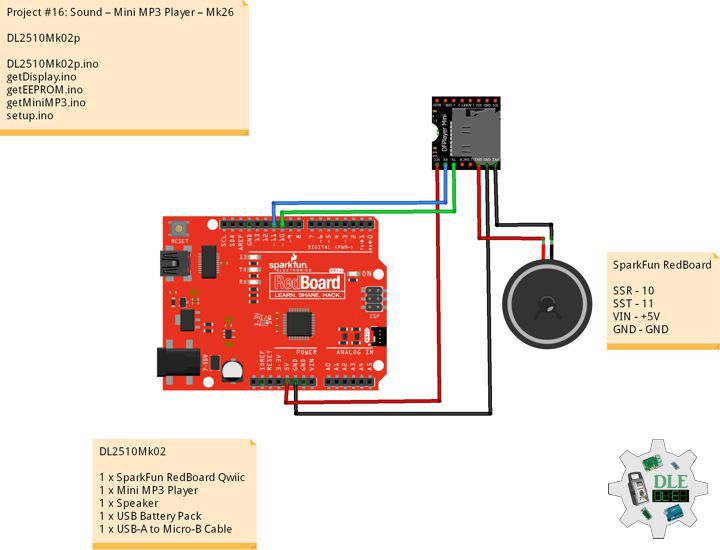
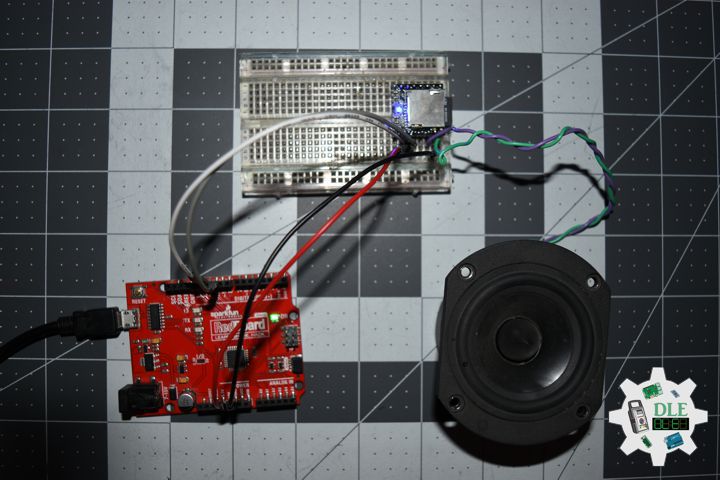
DL2510Mk02
1 x SparkFun RedBoard Qwiic
1 x Mini MP3 Player
1 x Speaker
1 x USB Battery Pack
1 x USB-A to Micro-B Cable
DL2510Mk02p
DL2510Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
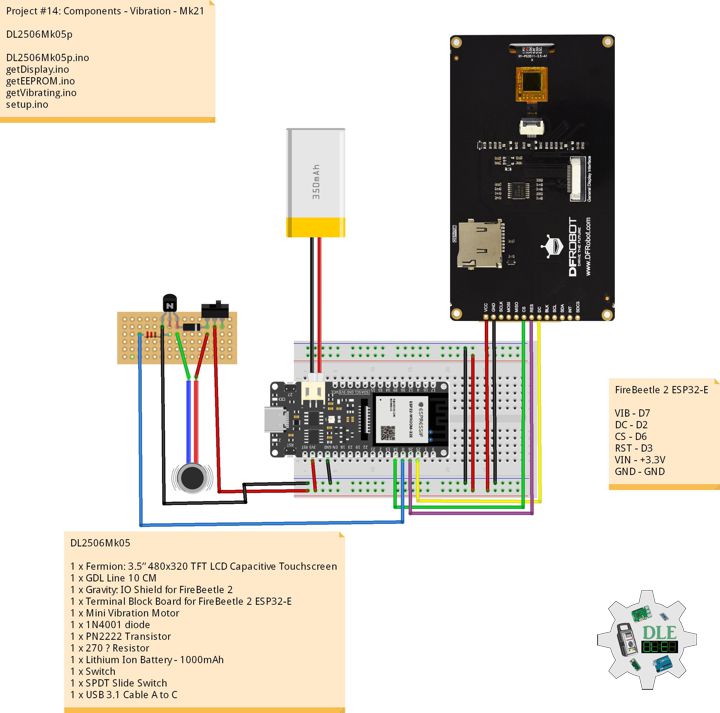
Project #16: Sound – Mini MP3 Player – Mk26
16-26
DL2509Mk02p.ino
DL2509Mk02
1 x SparkFun RedBoard Qwiic
1 x Mini MP3 Player
1 x Speaker
1 x USB Battery Pack
1 x USB-A to Micro-B Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include "Arduino.h"
// Software Serial
#include "SoftwareSerial.h"
// DFRobot DFPlayer Mini
#include "DFRobotDFPlayerMini.h"
// Software Serial RX, TX
SoftwareSerial mySoftwareSerial(10, 11);
// DFRobot DFPlayer Mini
DFRobotDFPlayerMini myDFPlayer;
// EEPROM Unique ID Information
String uid = "";
// Software Version Information
String sver = "16-26";
void loop() {
// isMP3
isMP3();
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getMiniMP3.ino
// Mini MP3
// isSetupMP3
void isSetupMP3(){
// Mini MP3
myDFPlayer.begin(mySoftwareSerial);
// Set volume value. From 0 to 30
myDFPlayer.volume(20);
// Play the first MP3
myDFPlayer.play(1);
}
// isMP3
void isMP3(){
// Timer
static unsigned long timer = millis();
// isMp3
if (millis() - timer > 8000) {
// Time
timer = millis();
// Play next mp3 every 8 second
myDFPlayer.next();
}
myDFPlayer.available();
}
setup.ino
// Setup
void setup()
{
// Delay
delay( 100 );
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Software Serial
mySoftwareSerial.begin(9600);
// Delay
delay( 100 );
// isSetupMP3
isSetupMP3();
// Delay 1 Second
delay( 1000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank , Underwater and UAV Vehicle
- Unmanned Vehicles Terrestrial, Marine and UAV
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot: https://learn.dfrobot.com/user-10186.html
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc