——
#DonLucElectronics #DonLuc #DFRobot #FermionBLESensorBeacon #MEMSSmokeGas #FireBeetle2ESP32E #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Smoke
Smoke is a suspension of airborne particulates and gases emitted when a material undergoes combustion or pyrolysis, together with the quantity of air that is entrained or otherwise mixed into the mass. It is commonly an unwanted by-product of fires, but may also be used for pest control, communication, defensive and offensive capabilities in the military, cooking, or smoking. It is used in rituals where incense, sage, or resin is burned to produce a smell for spiritual or magical purposes. It can also be a flavoring agent and preservative.
Smoke inhalation is the primary cause of death in victims of indoor fires. The smoke kills by a combination of thermal damage, poisoning and pulmonary irritation caused by carbon monoxide, hydrogen cyanide and other combustion products. Smoke is an aerosol of solid particles and liquid droplets that are close to the ideal range of sizes for Mie scattering of visible light.
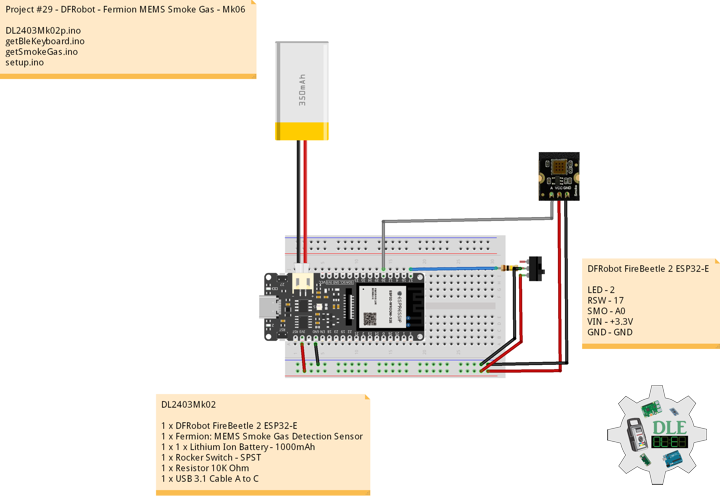
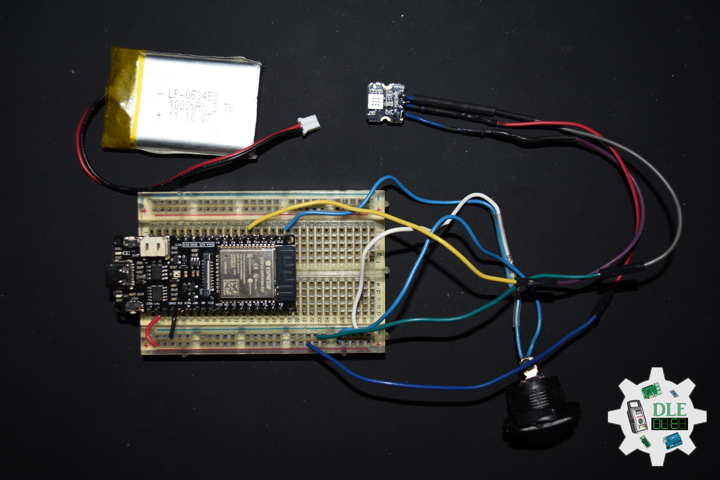
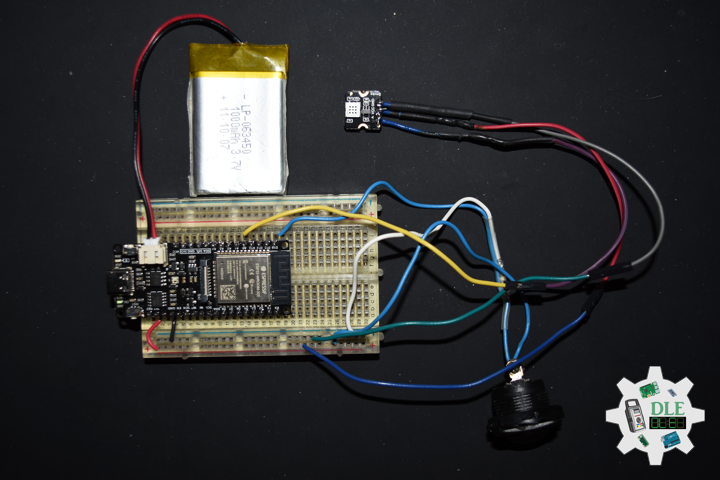
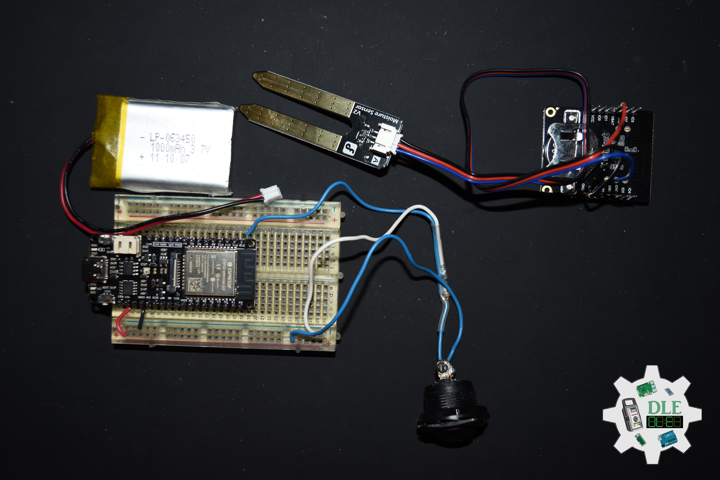
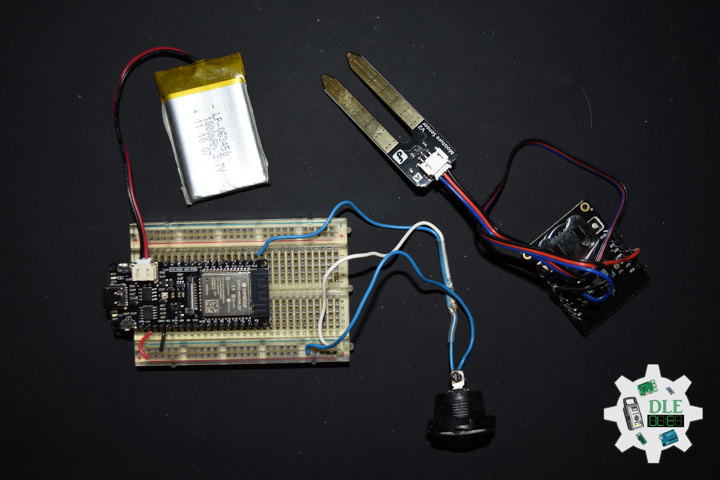
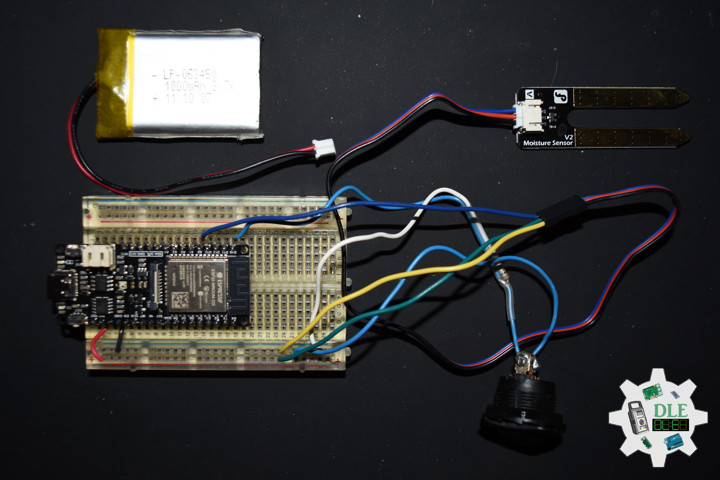
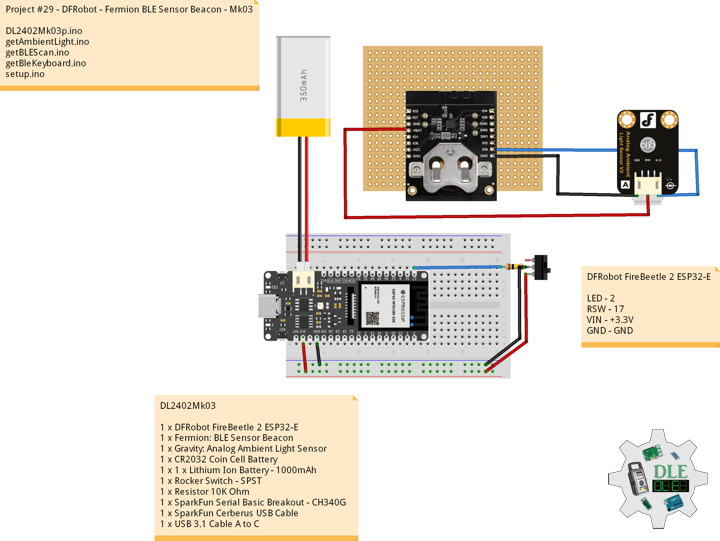
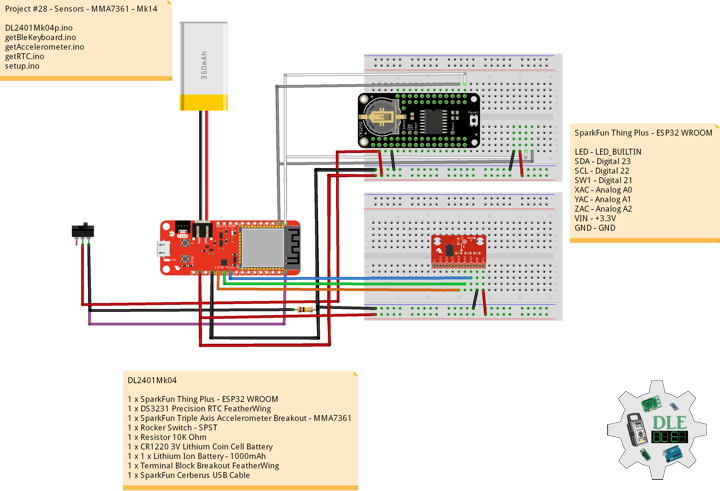
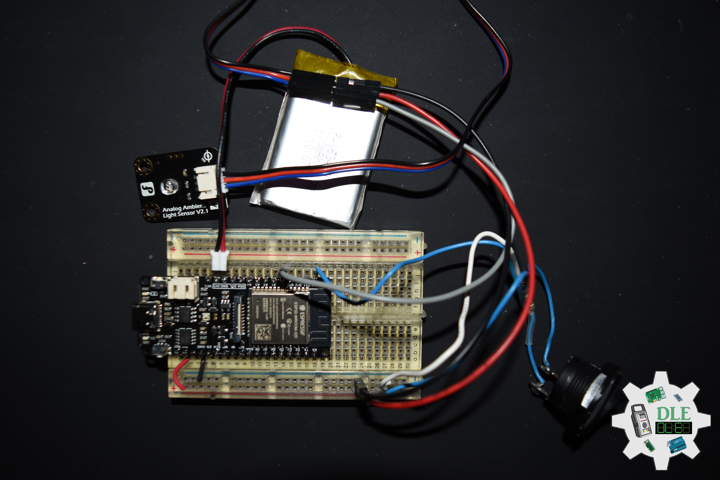
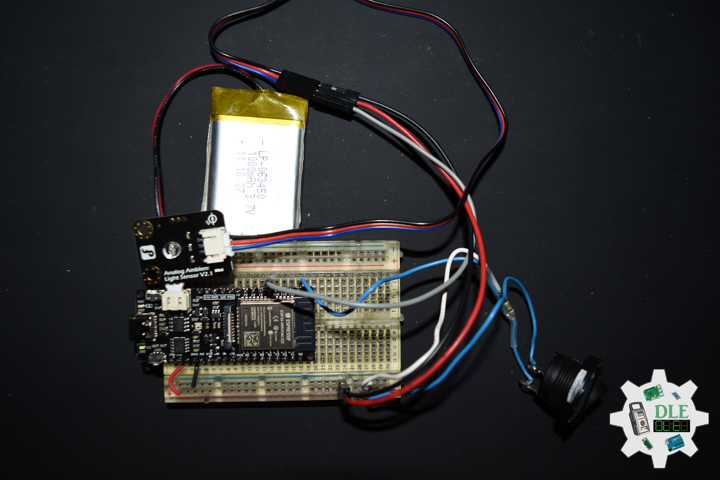
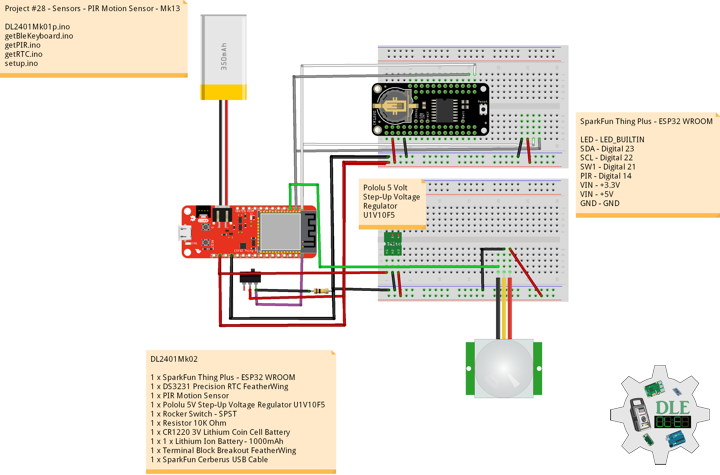
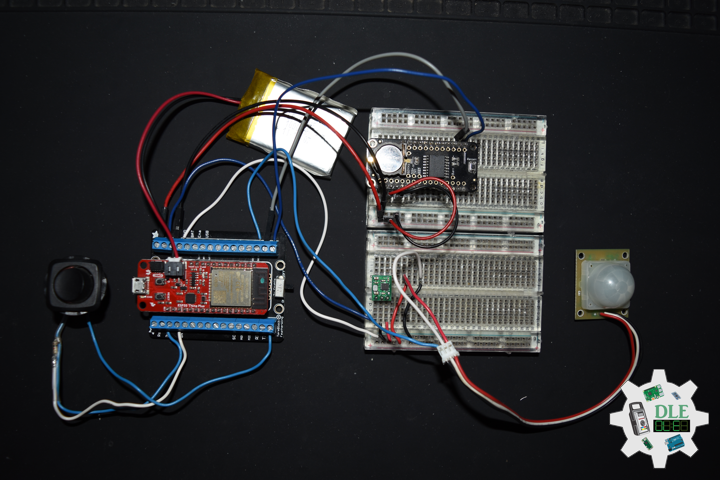
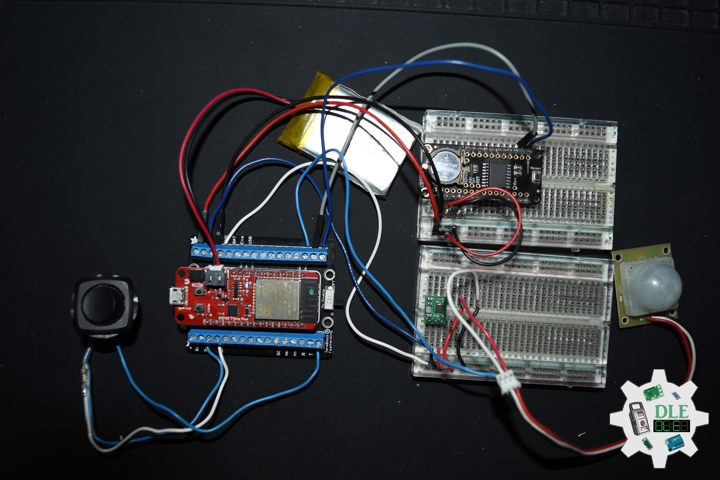
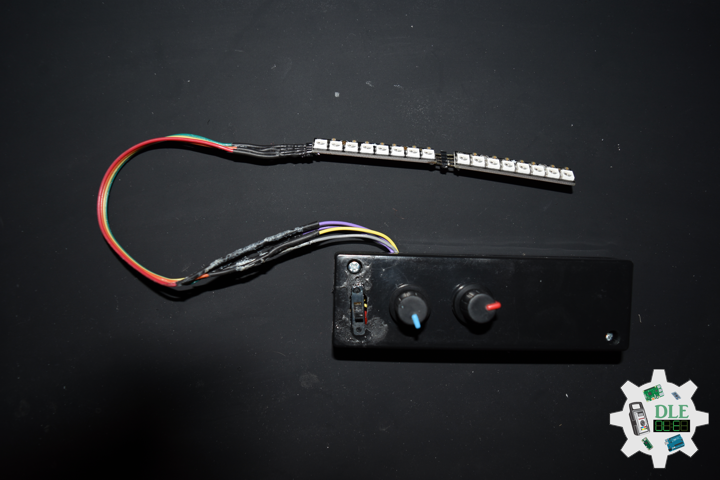
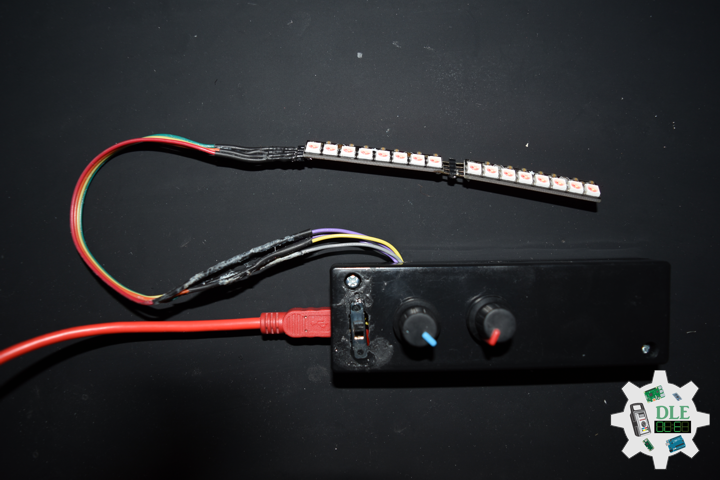
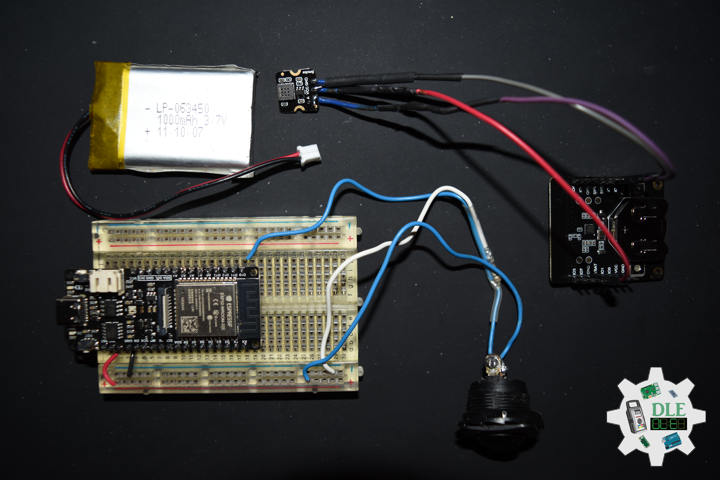
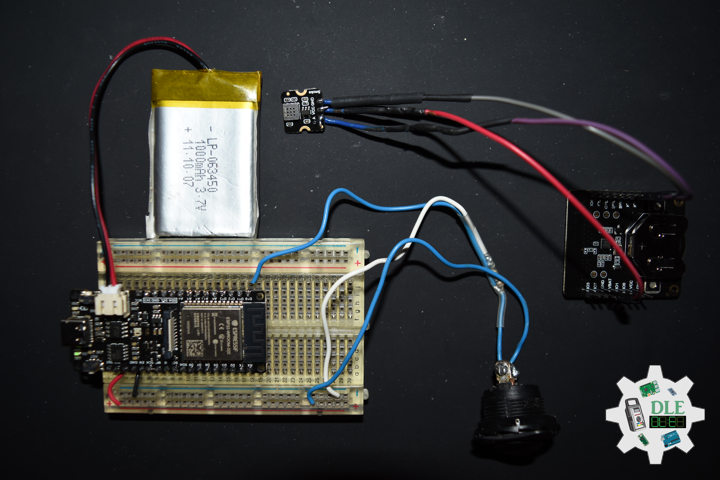
DL2403Mk03
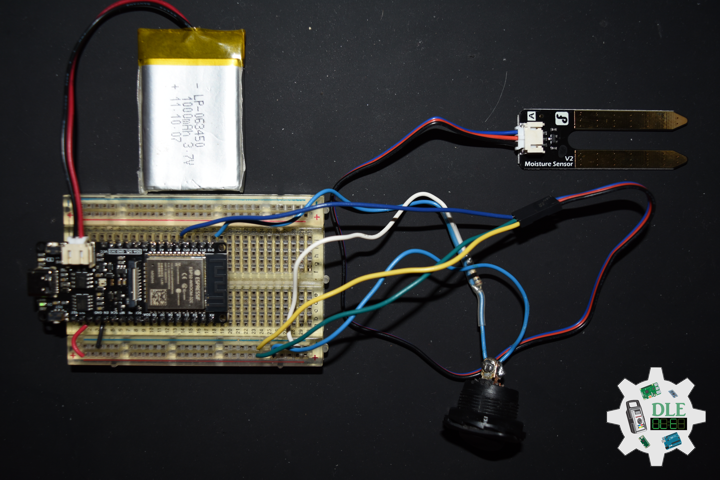
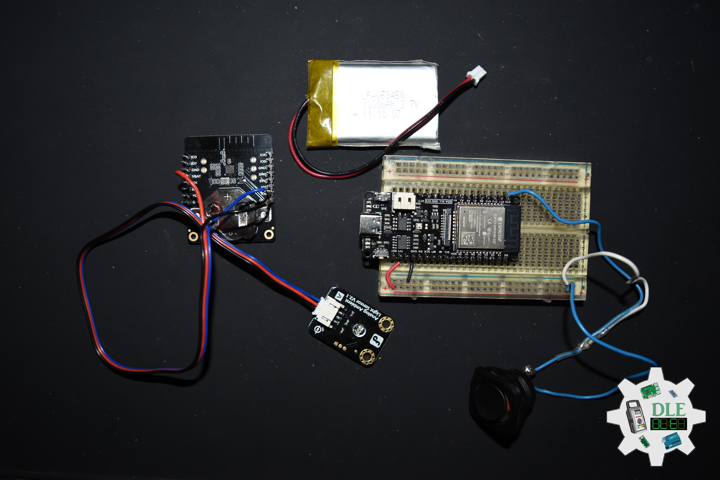
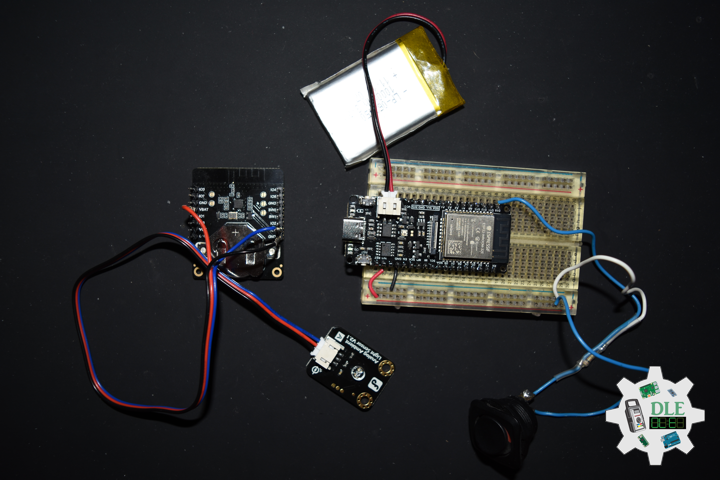
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout – CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
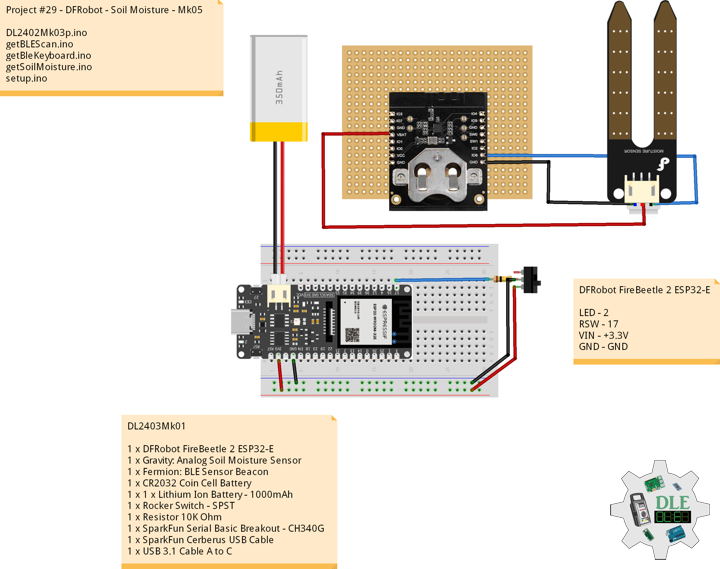
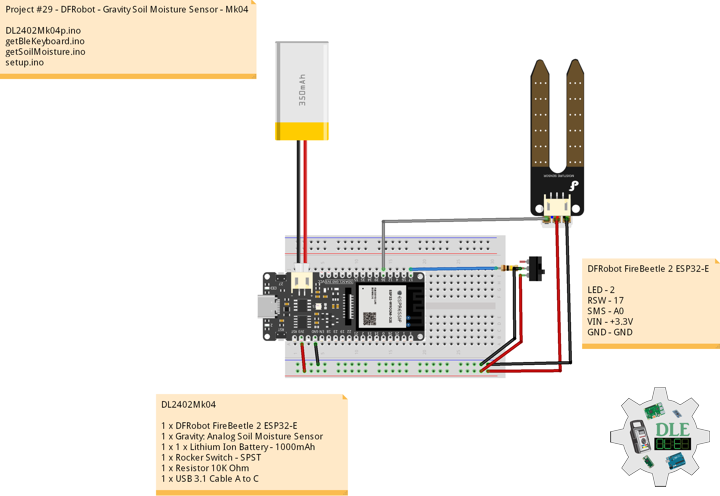
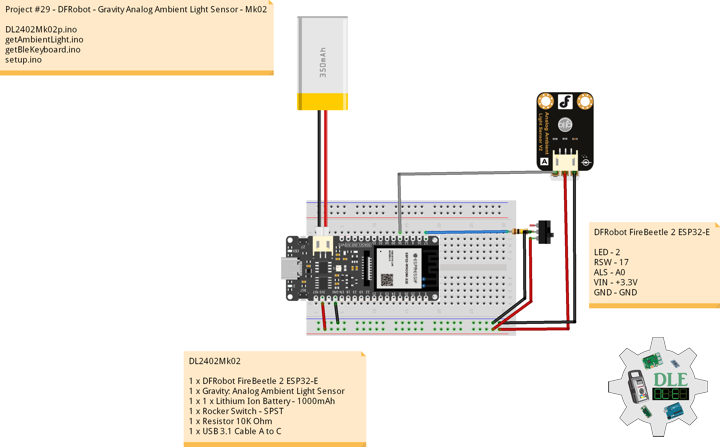
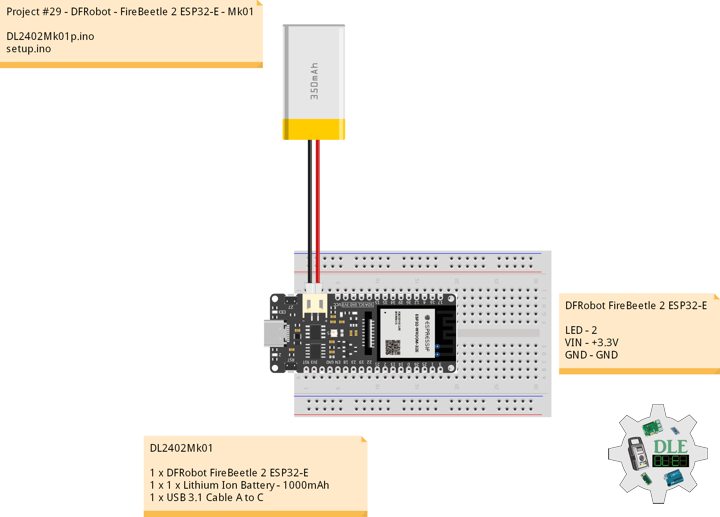
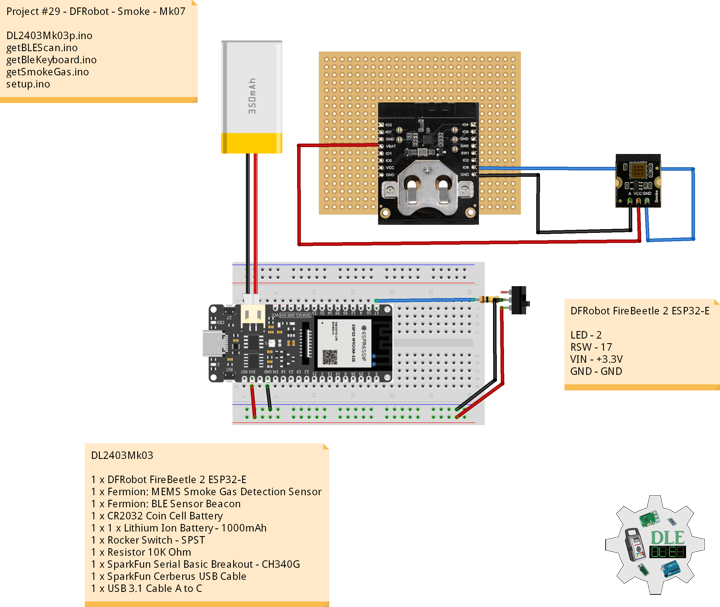
DFRobot FireBeetle 2 ESP32-E
LED – 2
RSW – 17
VIN – +3.3V
GND – GND
——
DL2403Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Smoke - Mk07
29-07
DL2403Mk03p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x SparkFun Serial Basic Breakout - CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Arduino
#include <Arduino.h>
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLEScan
#include <BLEScan.h>
// BLE Advertised Device
#include <BLEAdvertisedDevice.h>
// BLE Eddystone URL
#include <BLEEddystoneURL.h>
// BLE Eddystone TLM
#include <BLEEddystoneTLM.h>
// BLE Beacon
#include <BLEBeacon.h>
// ENDIAN_CHANGE
#define ENDIAN_CHANGE_U16(x) ((((x)&0xFF00) >> 8) + (((x)&0xFF) << 8))
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// Fermion: MEMS Smoke Gas Detection Sensor
float Sensor_Data;
// In seconds
int scanTime = 5;
// BLE Scan
BLEScan *pBLEScan;
// My Advertised Device Callbacks
class MyAdvertisedDeviceCallbacks : public BLEAdvertisedDeviceCallbacks
{
// onResult
void onResult(BLEAdvertisedDevice advertisedDevice)
{
// Advertised Device
if (advertisedDevice.haveName())
{
// Name: Fermion: Sensor Beacon
if(String(advertisedDevice.getName().c_str()) == "Smoke Gas"){
// strManufacturerData
std::string strManufacturerData = advertisedDevice.getManufacturerData();
uint8_t cManufacturerData[100];
strManufacturerData.copy((char *)cManufacturerData, strManufacturerData.length(), 0);
// strManufacturerData.length
for (int i = 0; i < strManufacturerData.length(); i++)
{
// cManufacturerData[i]
cManufacturerData[i];
}
// Sensor_Data
Sensor_Data = int(cManufacturerData[2]<<8 | cManufacturerData[3]);
}
}
}
};
// The number of the Rocker Switch pin
int iSwitch = 17;
// Variable for reading the button status
int SwitchState = 0;
// Define LED
int iLED = 2;
// Software Version Information
String sver = "29-07";
void loop() {
// ScanResults
isBLEScanResults();
// Fermion: MEMS Smoke Gas Detection Sensor
isSmokeGas();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 2 Second
delay(2000);
}
getBLEScan.ino
// getBLEScan
// Setup BLE Scan
void isSetupBLEScan(){
// BLE Device
BLEDevice::init("");
// Create new scan
pBLEScan = BLEDevice::getScan();
// Set Advertised Device Callbacks
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
// Active scan uses more power, but get results faster
pBLEScan->setActiveScan(true);
// Set Interval
pBLEScan->setInterval(100);
// Less or equal setInterval value
pBLEScan->setWindow(99);
}
// BLE Scan Results
void isBLEScanResults(){
// Put your main code here, to run repeatedly:
BLEScanResults foundDevices = pBLEScan->start(scanTime, false);
// Delete results fromBLEScan buffer to release memory
pBLEScan->clearResults();
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getSmokeGas.ino
// Fermion: MEMS Smoke Gas Detection Sensor
// Smoke Gas
void isSmokeGas(){
// bleKeyboard (10-1000ppm)
// DFR|Version|Smoke Gas Detection|*
sKeyboard = "DFR|" + sver + "|" + String(Sensor_Data) + "|*";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Give display time to power on
delay(100);
// Setup BLE Scan
isSetupBLEScan();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc