——
#DonLucElectronics #DonLuc #Synthesizer #Mozzi #Keyboard #ADSREnvelope #Arduino #SparkFunRedBoard #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
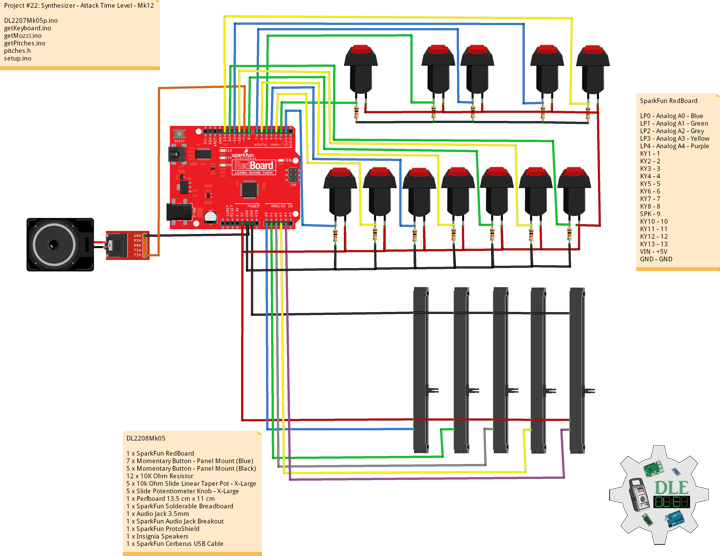
Attack Time Level
When creating artificial waveforms in a synthesizer, changes in the signal amplitude over time are controlled by an envelope generator which typically has controls to adjust the Attack, Decay, Sustain and Release times, triggered by the pressing and subsequent release of a key on the keyboard. The Attack Time Level determines the time taken for the signal to grow to its maximum amplitude, initiated by the pressing of a key. By lengthening the attack and release times, you can create rich, lush tones. By shortening the time of the attack and release phases, you can create percussive, staccato sounds.
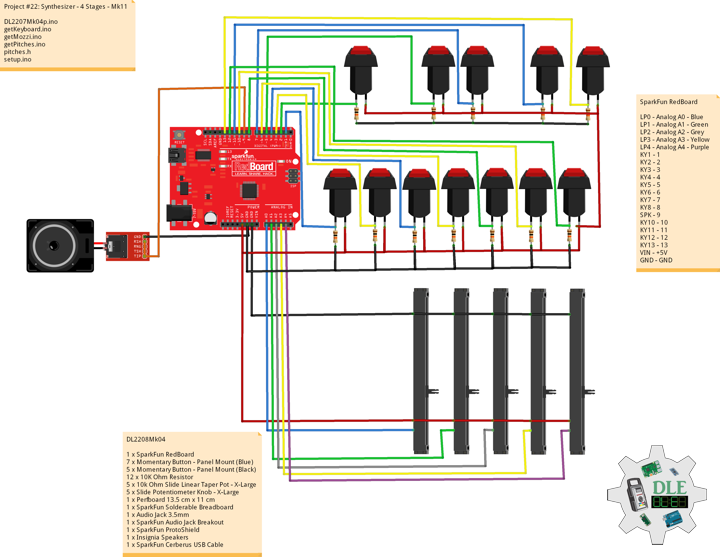
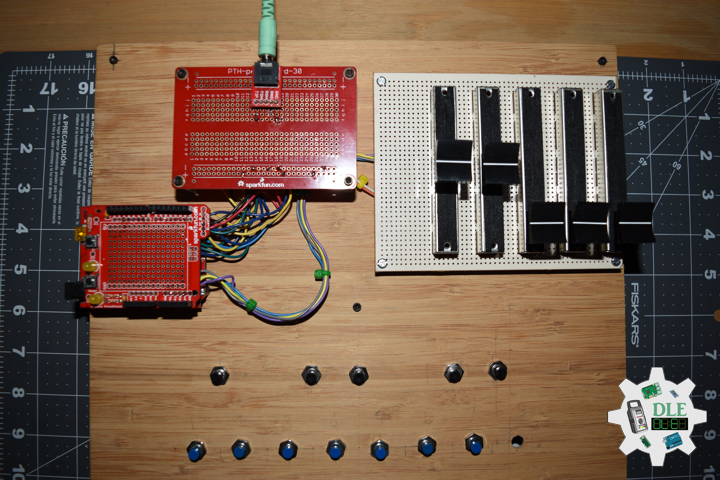
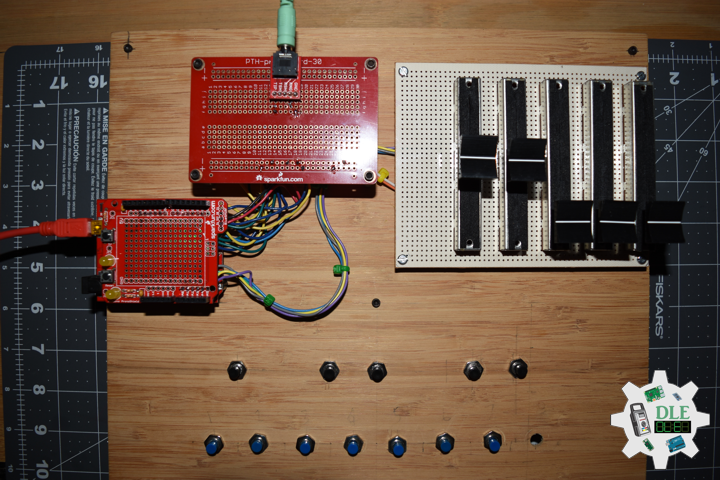
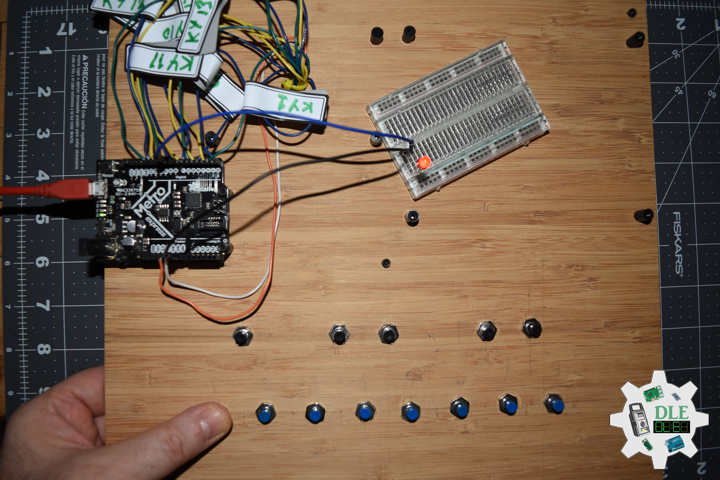
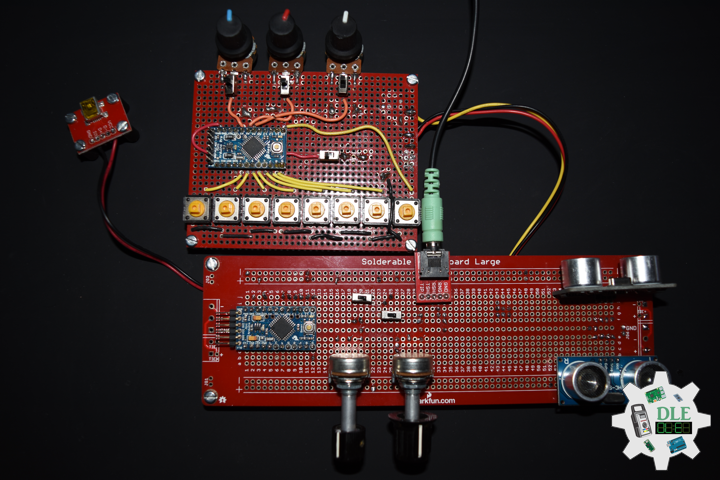
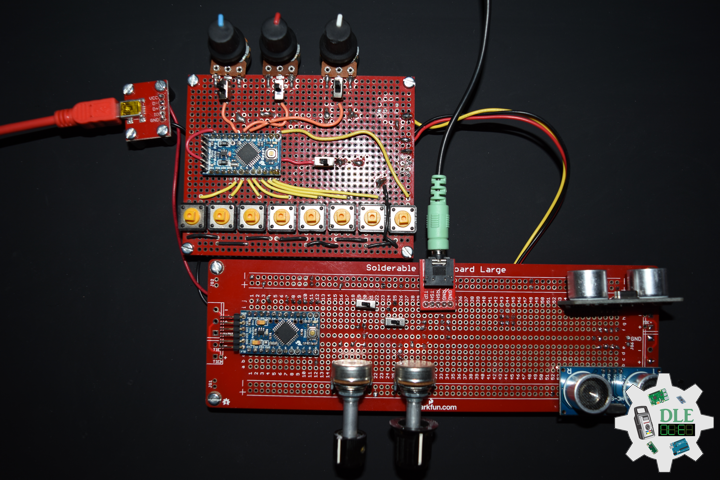
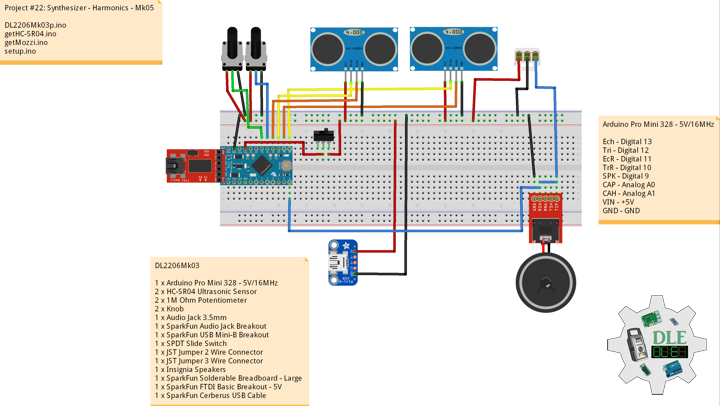
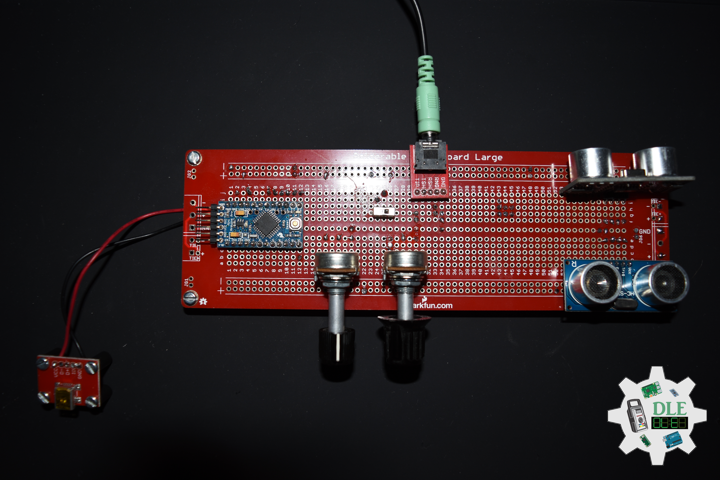
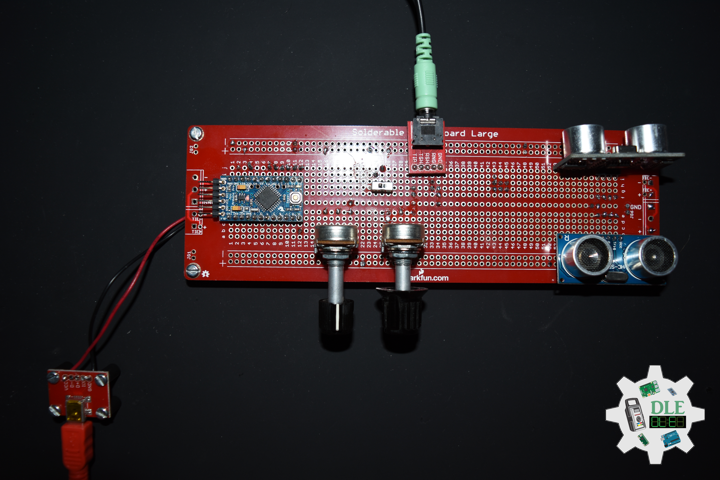
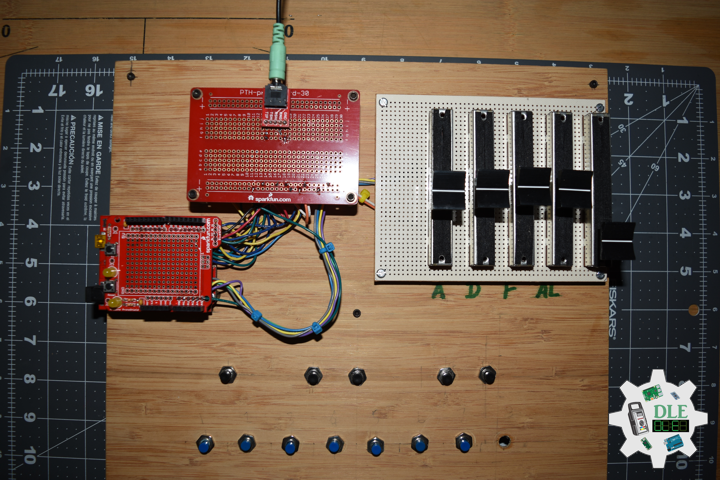
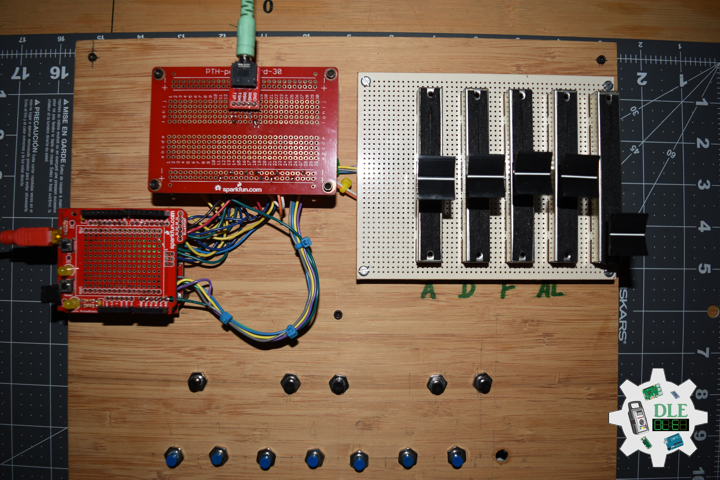
DL2208Mk05
1 x SparkFun RedBoard
7 x Momentary Button – Panel Mount (Blue)
5 x Momentary Button – Panel Mount (Black)
12 x 10K Ohm Resistor
5 x 10k Ohm Slide Linear Taper Pot – X-Large
5 x Slide Potentiometer Knob – X-Large
1 x Perfboard 13.5 cm x 11 cm
1 x SparkFun Solderable Breadboard
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x SparkFun ProtoShield
1 x Insignia Speakers
1 x SparkFun Cerberus USB Cable
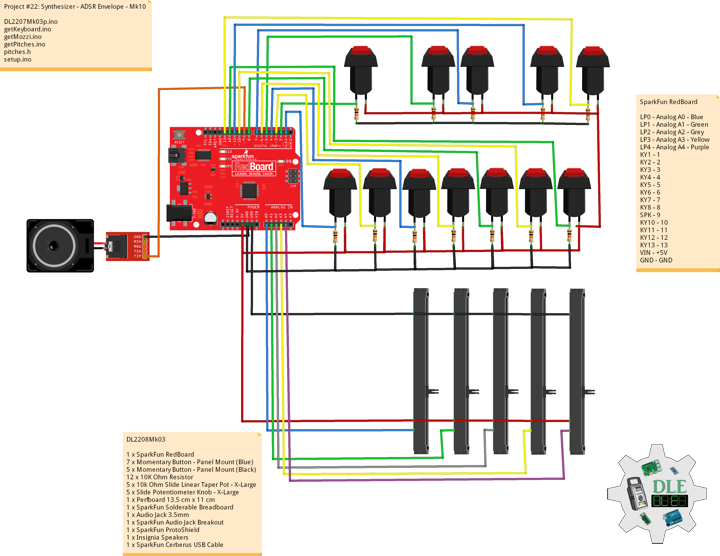
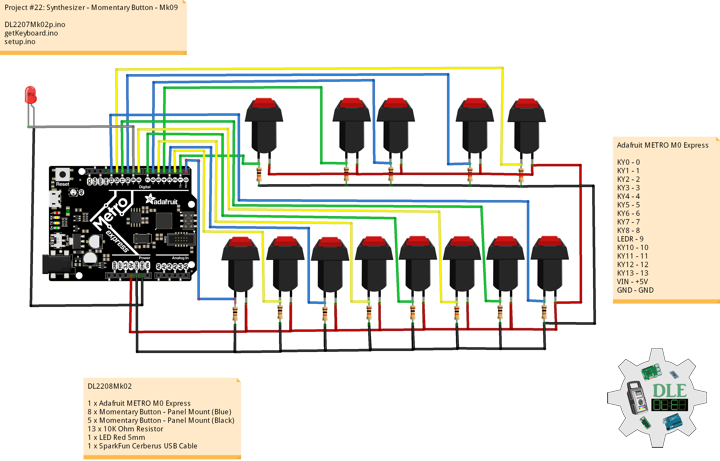
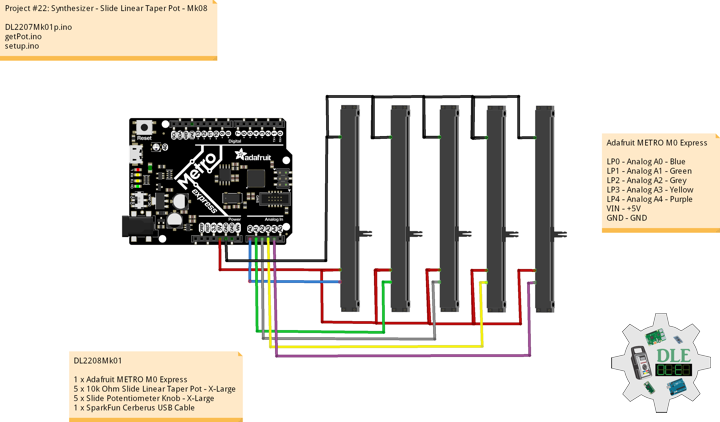
SparkFun RedBoard
LP0 – Analog A0 – Blue
LP1 – Analog A1 – Green
LP2 – Analog A2 – Grey
LP3 – Analog A3 – Yellow
LP4 – Analog A4 – Purple
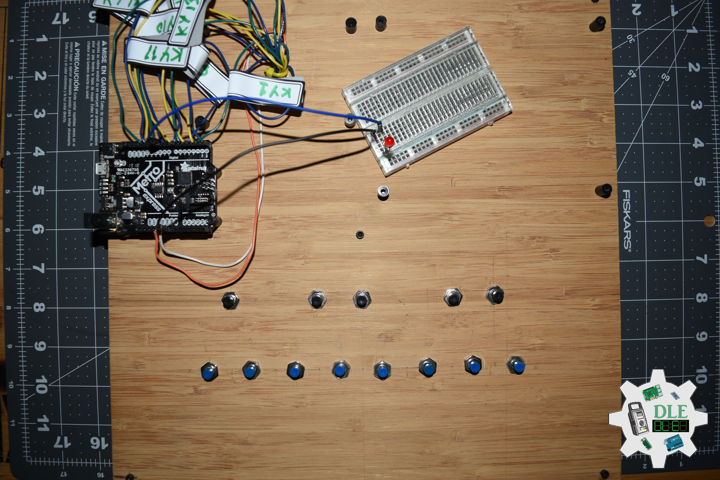
KY1 – 1
KY2 – 2
KY3 – 3
KY4 – 4
KY5 – 5
KY6 – 6
KY7 – 7
KY8 – 8
SPK – 9
KY10 – 10
KY11 – 11
KY12 – 12
KY13 – 13
VIN – +5V
GND – GND
——
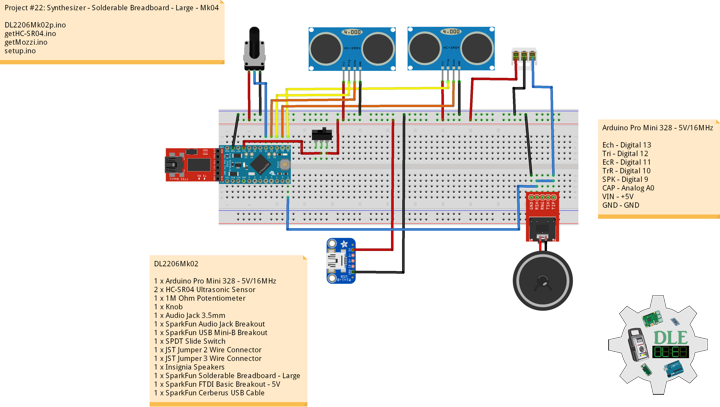
DL2208Mk05p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
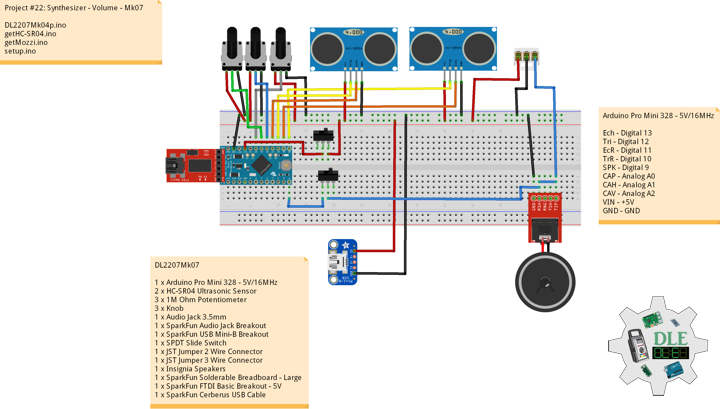
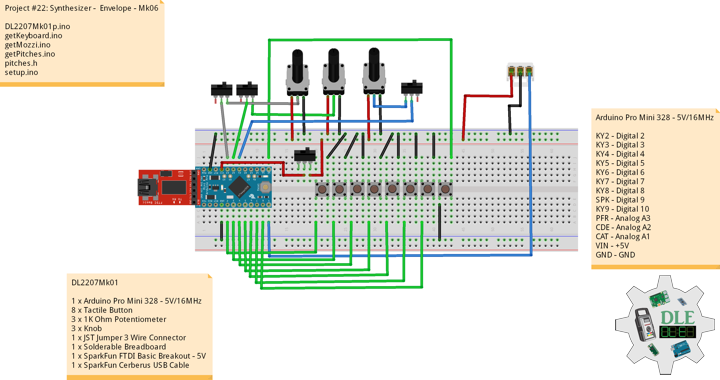
Project #22: Synthesizer - Attack Time Level - Mk12
22-12
DL2208Mk05p.ino
1 x SparkFun RedBoard
7 x Momentary Button - Panel Mount (Blue)
5 x Momentary Button - Panel Mount (Black)
12 x 1K Ohm Resistor
5 x 10k Ohm Slide Linear Taper Pot - X-Large
5 x Slide Potentiometer Knob - X-Large
1 x Perfboard 13.5 cm x 11 cm
1 x SparkFun Solderable Breadboard
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x SparkFun ProtoShield
1 x Insignia Speakers
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Pitches
#include "pitches.h"
// Mozzi
#include <MozziGuts.h>
// Oscillator
#include <Oscil.h>
// Sine Wave Table For Oscillator
#include <tables/sin2048_int8.h>
// ADSR envelope generator
#include <ADSR.h>
// Simple Keyboard
// Minimum reading of the button that generates a note
const int iKeyboard1 = 1;
const int iKeyboard2 = 2;
const int iKeyboard3 = 3;
const int iKeyboard4 = 4;
const int iKeyboard5 = 5;
const int iKeyboard6 = 6;
const int iKeyboard7 = 7;
const int iKeyboard8 = 8;
const int iKeyboard10 = 10;
const int iKeyboard11 = 11;
const int iKeyboard12 = 12;
const int iKeyboard13 = 13;
// Button is pressed
int iB1 = 1;
int iB2 = 1;
int iB3 = 1;
int iB4 = 1;
int iB5 = 1;
int iB6 = 1;
int iB7 = 1;
int iB8 = 1;
int iB10 = 1;
int iB11 = 1;
int iB12 = 1;
int iB13 = 1;
// Set the input for the potentiometer for Frequency to analog pin 2
const int potFreq = A2;
int iFreg = 1;
int iNoteA = 0;
int iNoteAS = 0;
int iNoteB = 0;
int iNoteC = 0;
int iNoteCS = 0;
int iNoteD = 0;
int iNoteDS = 0;
int iNoteE = 0;
int iNoteF = 0;
int iNoteFS = 0;
int iNoteG = 0;
int iNoteGS = 0;
// Potentiometer
int iPot4 = A4;
//Oscillator Functions declared for output envelope 1
// Sine Wave
Oscil <2048, AUDIO_RATE> aSin1(SIN2048_DATA);
// ADSR declaration/definition
// Comment out to use control rate of 128
#define CONTROL_RATE 128
ADSR <CONTROL_RATE, CONTROL_RATE> envelope1;
// Set the input for the potentiometer Attack to analog pin 1
const int potAttack = A0;
// Attack
int attack_level = 0;
int iAttack = 0;
// Set the input for the potentiometer for Decay to analog pin 2
const int potDecay = A1;
// Decay
int decay_level = 0;
int iDecay = 0;
// Set the input for the potentiometer Attack Time to analog pin 3
const int potAttackTime = A3;
// Attack Time
int AttackTime_level = 0;
int iAttackTime = 0;
// Software Version Information
String sver = "22-12";
void loop() {
// Audio Hook
audioHook();
}
getKeyboard.ino
// getKeyboard
// setupKeyboard
void setupKeyboard() {
// Initialize the button pin as an input
pinMode(iKeyboard1, INPUT_PULLUP);
pinMode(iKeyboard2, INPUT_PULLUP);
pinMode(iKeyboard3, INPUT_PULLUP);
pinMode(iKeyboard4, INPUT_PULLUP);
pinMode(iKeyboard5, INPUT_PULLUP);
pinMode(iKeyboard6, INPUT_PULLUP);
pinMode(iKeyboard7, INPUT_PULLUP);
pinMode(iKeyboard8, INPUT_PULLUP);
pinMode(iKeyboard10, INPUT_PULLUP);
pinMode(iKeyboard11, INPUT_PULLUP);
pinMode(iKeyboard12, INPUT_PULLUP);
pinMode(iKeyboard13, INPUT_PULLUP);
}
// isKeyboard
void isKeyboard() {
// Choose envelope levels
// attack_level
iAttack = mozziAnalogRead( potAttack );
attack_level = map( iAttack, 0, 1023, 100, 400);
// Attack Level
envelope1.setAttackLevel( attack_level );
// decay_level
iDecay = mozziAnalogRead( potDecay );
decay_level = map( iDecay, 0, 1023, 50, 255);
// Decay Level
envelope1.setDecayLevel( decay_level );
// AttackTime_level
iAttackTime = mozziAnalogRead( potAttackTime );
AttackTime_level = map( iAttackTime, 0, 1023, 0, 900);
// Attack Time Level
envelope1.setAttackTime( AttackTime_level );
// Read the state of the button value 1
if ( digitalRead(iKeyboard1) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 1
iB1 = iB1 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteA);
}
else
{
iB1 = iB1 - 1;
}
// Read the state of the button value 2
if ( digitalRead(iKeyboard2) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 2
iB2 = iB2 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteAS);
}
else
{
iB2 = iB2 - 1;
}
// Read the state of the button value 3
if ( digitalRead(iKeyboard3) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 3
iB3 = iB3 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteB);
}
else
{
iB3 = iB3 - 1;
}
// Read the state of the button value 4
if ( digitalRead(iKeyboard4) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 4
iB4 = iB4 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteC);
}
else
{
iB4 = iB4 - 1;
}
// Read the state of the button value 5
if ( digitalRead(iKeyboard5) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 5
iB5 = iB5 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteCS);
}
else
{
iB5 = iB5 - 1;
}
// Read the state of the button value 6
if ( digitalRead(iKeyboard6) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 6
iB6 = iB6 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteD);
}
else
{
iB6 = iB6 - 1;
}
// Read the state of the button value 7
if ( digitalRead(iKeyboard7) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 7
iB7 = iB7 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteDS);
}
else
{
iB7 = iB7 - 1;
}
// Read the state of the button value 8
if ( digitalRead(iKeyboard8) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 8
iB8 = iB8 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteE);
}
else
{
iB8 = iB8 - 1;
}
// Read the state of the button value 10
if ( digitalRead(iKeyboard10) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 10
iB10 = iB10 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteF);
}
else
{
iB10 = iB10 - 1;
}
// Read the state of the button value 11
if ( digitalRead(iKeyboard11) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 11
iB11 = iB11 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteFS);
}
else
{
iB11 = iB11 - 1;
}
// Read the state of the button value 12
if ( digitalRead(iKeyboard12) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 12
iB12 = iB12 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteG);
}
else
{
iB12 = iB12 - 1;
}
// Read the state of the button value 13
if ( digitalRead(iKeyboard13) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 13
iB13 = iB13 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteGS);
}
else
{
iB13 = iB13 - 1;
}
}
getMozzi.ino
// Mozzi
// Update Control
void updateControl(){
// Frequency
isPitches();
// Keyboard
isKeyboard();
}
// Update Audio
int updateAudio()
{
// Update Audio
// ADSR declaration/definition
envelope1.update();
// >>8 for AUDIO_MODE STANDARD
return (int) (envelope1.next() * aSin1.next())>>8;
}
getPitches.ino
// Pitches
// isPitches
void isPitches(){
// Frequency
// Value is 0-1023
iFreg = mozziAnalogRead(potFreq);
iFreg = map(iFreg, 0, 1023, 2, 6);
// Range Frequency Note Low => High
switch ( iFreg ) {
case 1:
// NOTE A1
iNoteA = NOTE_A1;
iNoteAS = NOTE_AS1;
iNoteB = NOTE_B1;
iNoteC = NOTE_C2;
iNoteCS = NOTE_CS2;
iNoteD = NOTE_D2;
iNoteDS = NOTE_DS2;
iNoteE = NOTE_E2;
iNoteF = NOTE_F2;
iNoteFS = NOTE_FS2;
iNoteG = NOTE_G2;
iNoteGS = NOTE_GS2;
break;
case 2:
// NOTE A2
iNoteA = NOTE_A2;
iNoteAS = NOTE_AS2;
iNoteB = NOTE_B2;
iNoteC = NOTE_C3;
iNoteCS = NOTE_CS3;
iNoteD = NOTE_D3;
iNoteDS = NOTE_DS3;
iNoteE = NOTE_E3;
iNoteF = NOTE_F3;
iNoteFS = NOTE_FS3;
iNoteG = NOTE_G3;
iNoteGS = NOTE_GS3;
break;
case 3:
// NOTE A3
iNoteA = NOTE_A3;
iNoteAS = NOTE_AS3;
iNoteB = NOTE_B3;
iNoteC = NOTE_C4;
iNoteD = NOTE_D4;
iNoteDS = NOTE_DS4;
iNoteE = NOTE_E4;
iNoteF = NOTE_F4;
iNoteFS = NOTE_FS4;
iNoteG = NOTE_G4;
iNoteGS = NOTE_GS4;
break;
case 4:
// NOTE A4
iNoteA = NOTE_A4;
iNoteAS = NOTE_AS4;
iNoteB = NOTE_B4;
iNoteC = NOTE_C5;
iNoteCS = NOTE_CS5;
iNoteD = NOTE_D5;
iNoteE = NOTE_E5;
iNoteF = NOTE_F5;
iNoteFS = NOTE_FS5;
iNoteG = NOTE_G5;
iNoteGS = NOTE_GS5;
break;
case 5:
// NOTE A5
iNoteA = NOTE_A5;
iNoteAS = NOTE_AS5;
iNoteB = NOTE_B5;
iNoteC = NOTE_C6;
iNoteCS = NOTE_CS6;
iNoteD = NOTE_D6;
iNoteDS = NOTE_DS6;
iNoteE = NOTE_E6;
iNoteF = NOTE_F6;
iNoteFS = NOTE_FS6;
iNoteG = NOTE_G6;
iNoteGS = NOTE_GS6;
break;
case 6:
// NOTE A6
iNoteA = NOTE_A6;
iNoteAS = NOTE_AS6;
iNoteB = NOTE_B6;
iNoteC = NOTE_C7;
iNoteCS = NOTE_CS7;
iNoteD = NOTE_D7;
iNoteDS = NOTE_DS7;
iNoteE = NOTE_E7;
iNoteF = NOTE_F7;
iNoteFS = NOTE_FS7;
iNoteG = NOTE_G7;
iNoteGS = NOTE_GS7;
break;
}
}
pitches.h
/***************************************************************** * Pitches NOTE_B0 <=> NOTE_DS8 - NOTE_A4 is "A" measured at 440Hz *****************************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
setup.ino
// Setup
void setup() {
// Setup Keyboard
setupKeyboard();
// Mozzi Start
startMozzi( CONTROL_RATE );
// Sets Attack and Decay Levels; assumes Sustain, Decay, and Idle times
envelope1.setADLevels(200,200);
// Sets Decay time in milliseconds
envelope1.setDecayTime(200);
// Sustain Time setting for envelope1
envelope1.setSustainTime(52500);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc