Rotary Switch – 10 Position
This is a single pole, 10 position rotary switch able to select up to 10 different states in a durable package. Unlike our other rotary switch, this model is much more robust and capable of handling larger currents and voltages.
With a max voltage rating of 125VAC at 0.3A and a dielectric strength of 250VAC for 1 minute this is a serious little rotary switch capable of working with some of your bigger projects. Though this switch requires you to use 11 pins and is not breadboard friendly we do offer a breakout board (found in the Recommended Products section below) to provide easier access to its capabilities.
1 x Rotary Switch – 10 Position
1 x Hex Nut
2 x Washer
Rating: 0.3A/125VAC
Contact Resistance: 50M Ohm max
Insulation Resistance: 100M Ohm @ 500VDC min
Dielectric Strength: 250VAC for 1 minute
Rotation torque: 1.0+0.5KG/cm
Shaft: 3/8″
Rotary Switch Breakout
This is the SparkFun Rotary Switch Breakout, a very simple board designed to easily provide you access to each pin on our 10-position rotary switches. This breakout allows you to easily add a rotary switch to your next project without having to worry about attaching its unique footprint to a custom board or solderless breadboard. All you need to do is solder the 10-position rotary switch into the breakout (using the silkscreen on the board as a guide) and each pin will become available for breadboard or hookup wire compatibility.
Each one of these boards breaks out the common ( C ), 1, 2, 3, 4, 5, 6, 7, 8, 9, and 10 positions on the board into 0.1″ spaced pins.
NeoPixel Stick – 8 x 5050 RGB LED
Make your own little LED strip arrangement with this stick of NeoPixel LEDs. We crammed 8 of the tiny 5050 (5mm x 5mm) smart RGB LEDs onto a PCB with mounting holes and a chainable design. Use only one microcontroller pin to control as many as you can chain together! Each LED is addressable as the driver chip is inside the LED. Each one has ~18mA constant current drive so the color will be very consistent even if the voltage varies, and no external choke resistors are required making the design slim. Power the whole thing with 5VDC (4-7V works) and you’re ready to rock.
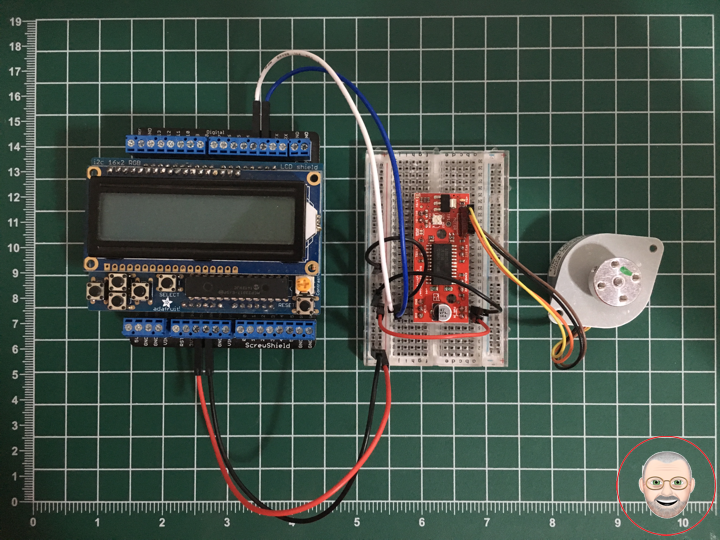
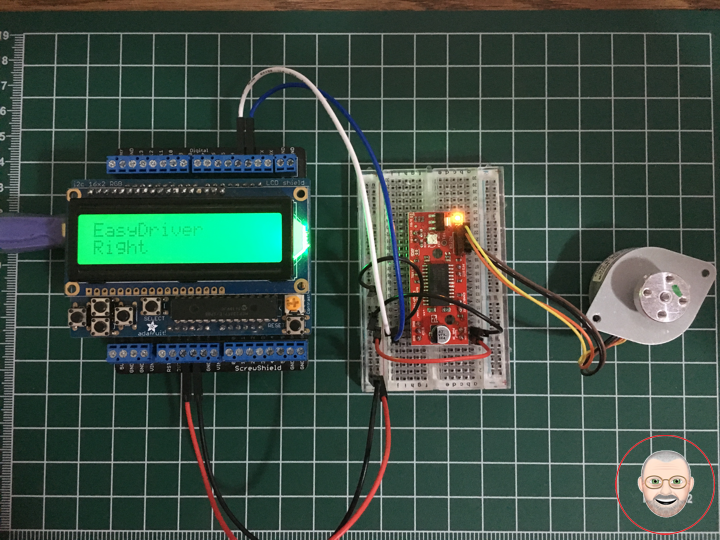
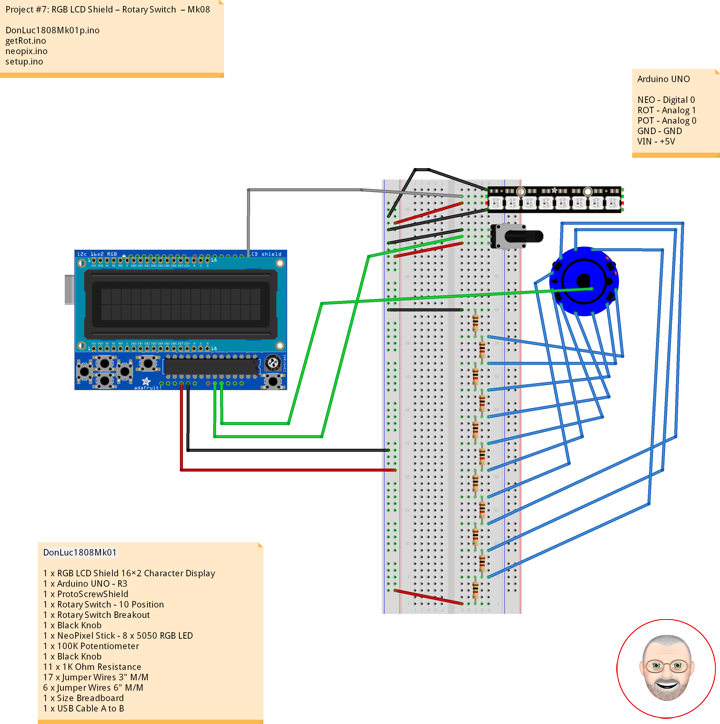
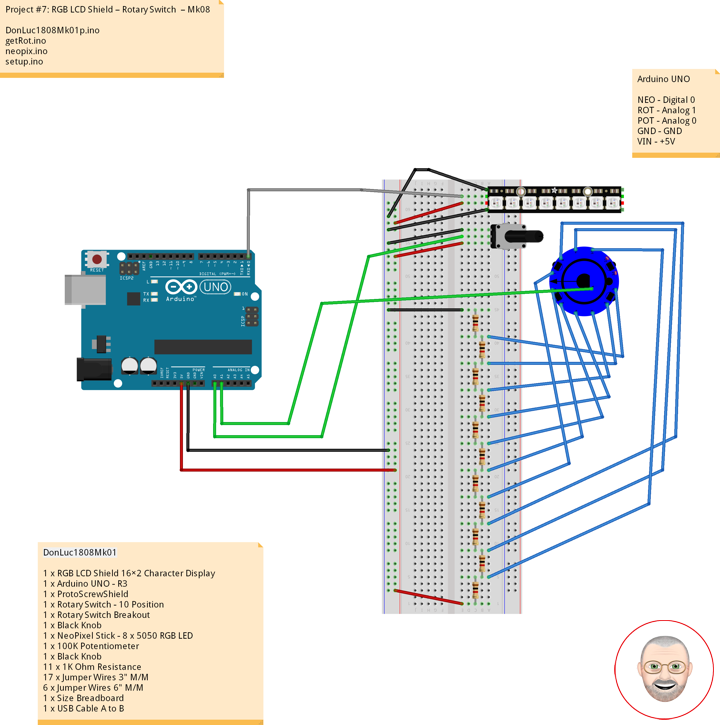
DonLuc1808Mk01
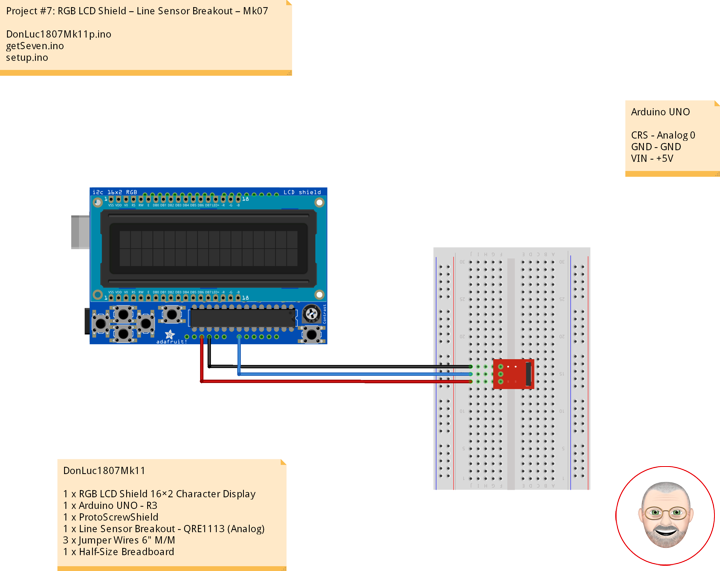
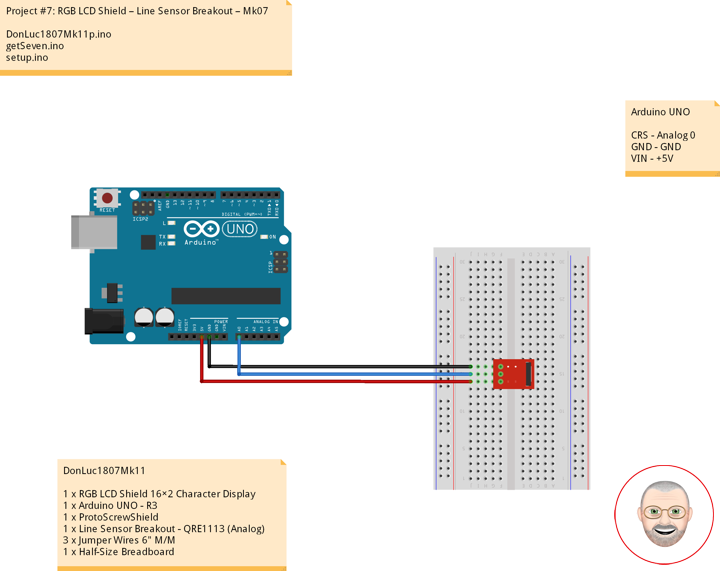
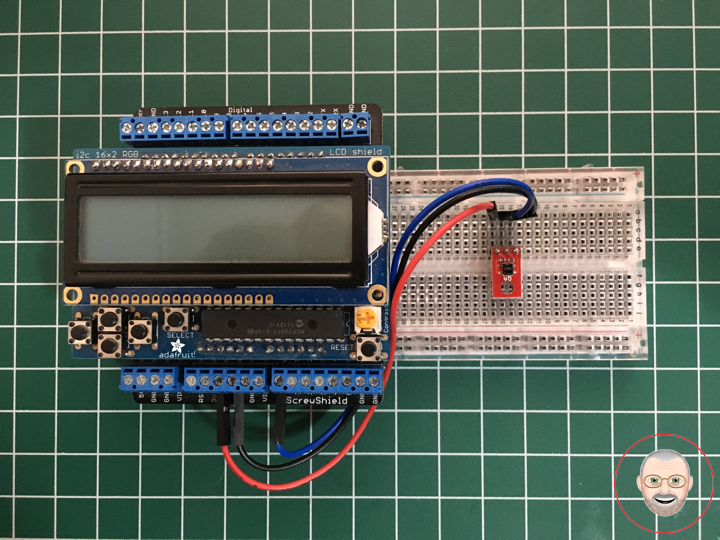
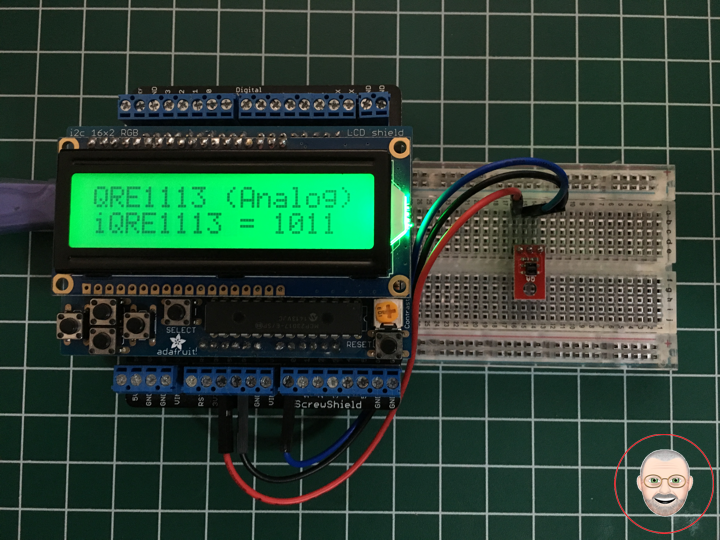
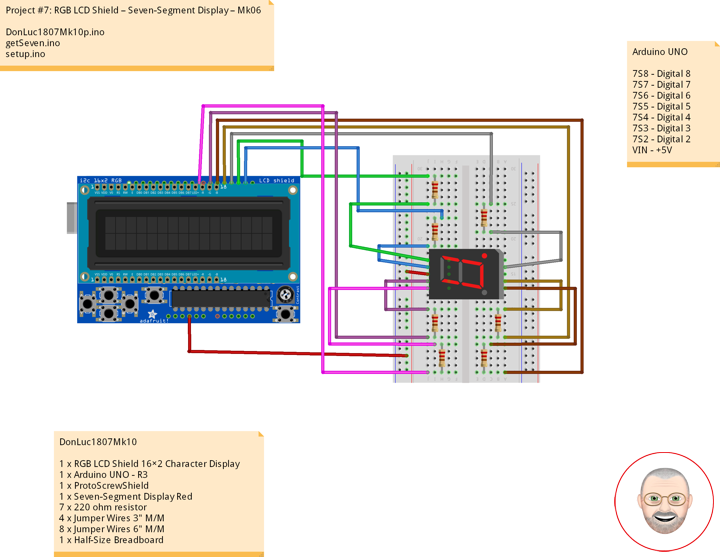
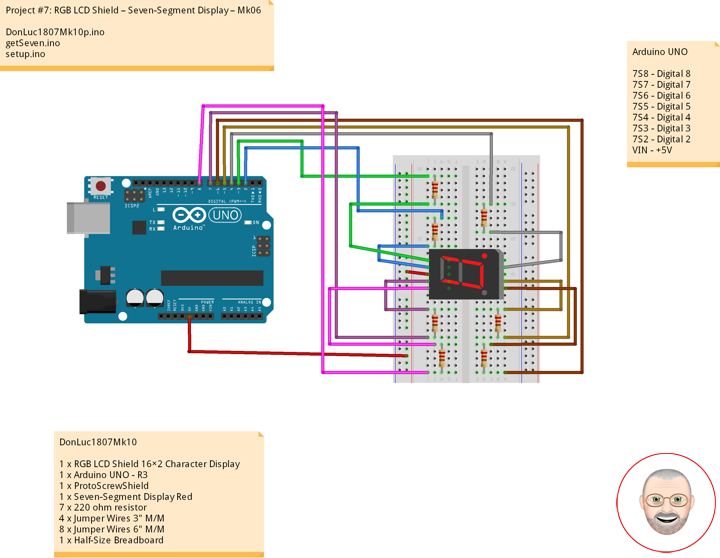
1 x RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
1 x Rotary Switch – 10 Position
1 x Rotary Switch Breakout
1 x Black Knob
1 x NeoPixel Stick – 8 x 5050 RGB LED
1 x 100K Potentiometer
1 x Black Knob
11 x 1K Ohm Resistance
17 x Jumper Wires 3″ M/M
6 x Jumper Wires 6″ M/M
1 x Size Breadboard
1 x USB Cable A to B
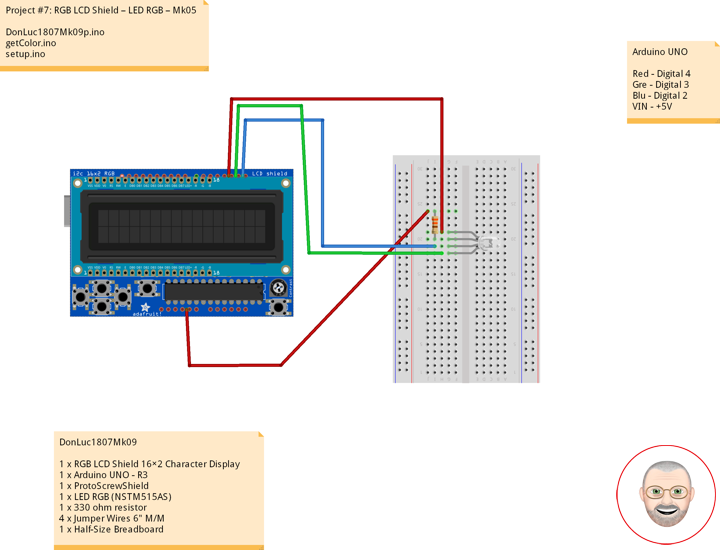
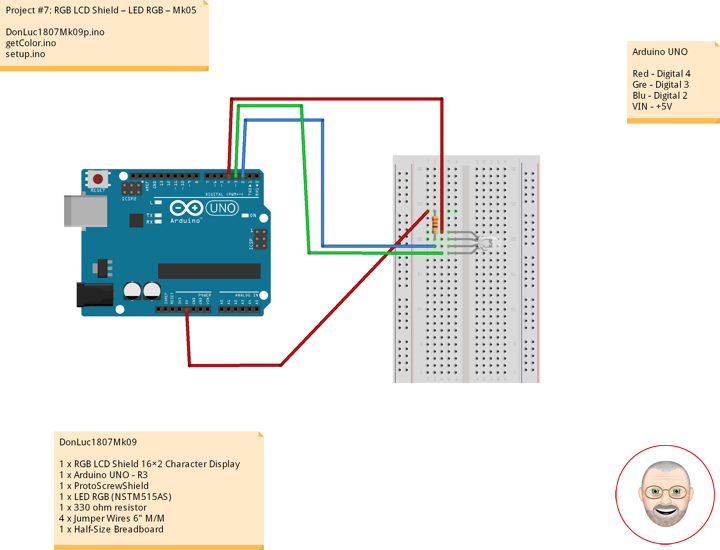
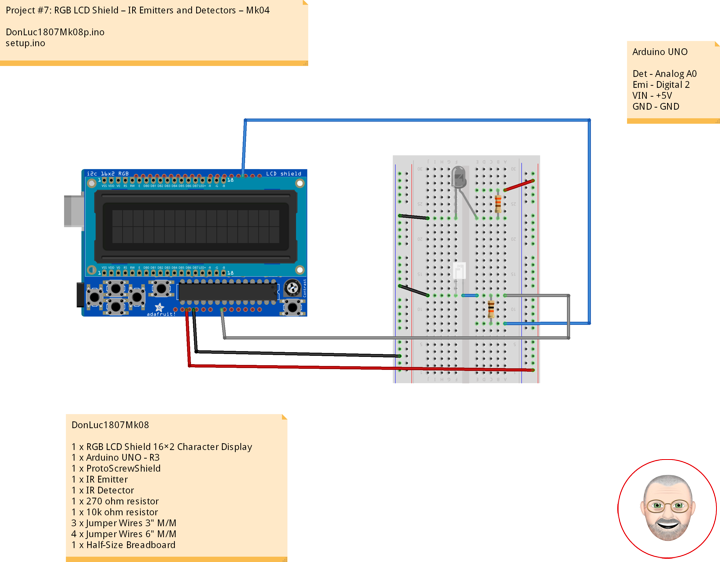
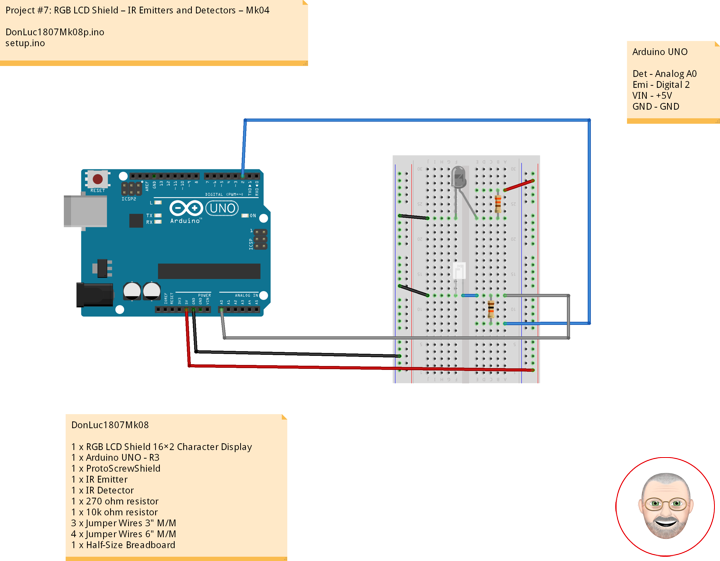
Arduino UNO
NEO – Digital 0
ROT – Analog 1
POT – Analog 0
GND – GND
VIN – +5V
DonLuc1808Mk01p.ino
// ***** Don Luc *****
// Software Version Information
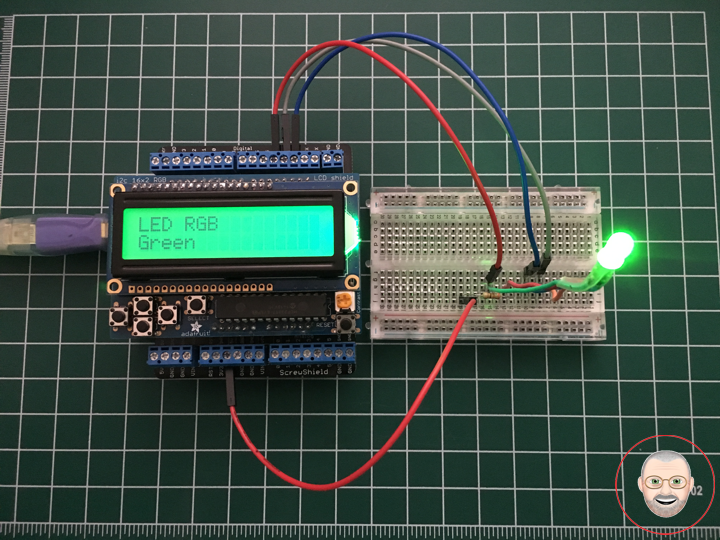
// Project #7: RGB LCD Shield – Rotary Switch – Mk08
// 8-01
// DonLuc1808Mk01p 8-01
// RGB LCD Shield
// Rotary Switch
// Include Library Code
#include <Adafruit_MCP23017.h>
#include <Adafruit_RGBLCDShield.h>
#include <Adafruit_NeoPixel.h>
// RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
#define GREEN 0x2
// NeoPixels
#define PIN 0 // On digital pin 3
#define NUMPIXELS 8 // NeoPixels NUMPIXELS = 8
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
int red = 0; // Red
int green = 0; // Green
int blue = 0; // Blue
int iNeo = 0; // Neopix
const int iBriPin = A0; // Panel Mount 1K potentiometer Brightneed
int iBri = 0; // Neopix Brightness
int iBriMin = 1023; // Brightneed minimum sensor value
int iBriMax = 0; // Brightneed maximun sensor value
// Rotary Switch
// Rotary Switch - 10 Position
// Number = 1 => 10
int iRotNum = A1; // Rotary Switch
int iVal = 0; // iVal - Value
int z = 0; // Number
void loop()
{
// Rotary Switch
isRot();
delay(1000);
// Clear
RGBLCDShield.clear();
}
getRot.ino
// Rotary Switch
void isRot()
{
// NeoPixels
for(int y=0; y < NUMPIXELS; y++)
{
// Black
red = 0; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
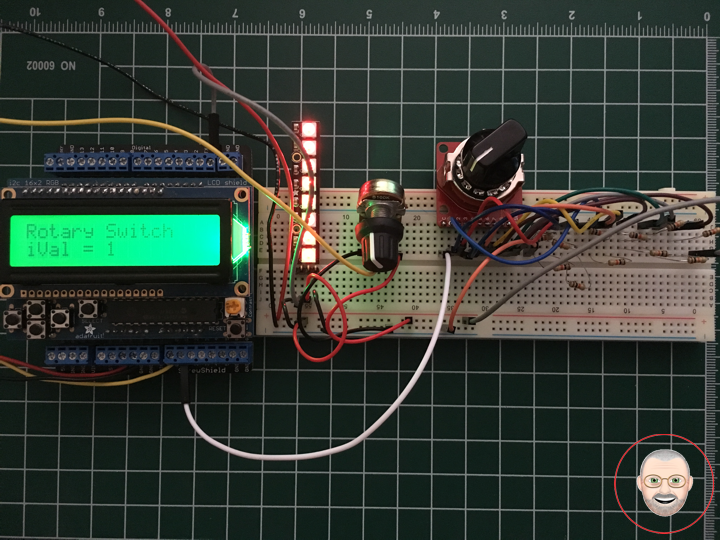
RGBLCDShield.print("Rotary Switch"); // Rotary Switch
// Rotary Switch
z = analogRead( iRotNum ); // Rotary Switch
iVal = ( z / 100 ); // Rotary Value
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("iVal = "); // Rotary Value
RGBLCDShield.print( iVal + 1 );
// Range Value
switch ( iVal ) {
case 0:
// Red
// NeoPixels
for(int y=0; y<NUMPIXELS; y++){
red = 255; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 1:
// Green
// NeoPixels
for(int y=0; y<NUMPIXELS; y++){
red = 0; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 2:
// Blue
// NeoPixels
for(int y=0; y<NUMPIXELS; y++){
red = 0; // Red
green = 0; // Green
blue = 255; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 3:
// White
// NeoPixels
for(int y=0; y<NUMPIXELS; y++){
red = 255; // Red
green = 255; // Green
blue = 255; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 4:
// NeoPixels
// Red
for(int y=0; y<NUMPIXELS; y++){
red = 255; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
delay( 2000 );
// Green
for(int y=0; y<NUMPIXELS; y++){
red = 0; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
delay( 2000 );
// Blue
for(int y=0; y<NUMPIXELS; y++){
red = 0; // Red
green = 0; // Green
blue = 255; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 5:
// NeoPixels
// Yellow
for(int y=0; y<NUMPIXELS; y++){
red = 255; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 6:
// NeoPixels
// Orange
for(int y=0; y<NUMPIXELS; y++){
red = 255; // Red
green = 102; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 7:
// NeoPixels
// Violet
for(int y=0; y<NUMPIXELS; y++){
red = 204; // Red
green = 102; // Green
blue = 204; // Blue
iNeo = y; // Neopix
neopix();
}
break;
case 8:
// NeoPixels
// Red
red = 255; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = 0; // Neopix
neopix();
delay( 1000 );
// Green
red = 0; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = 1; // Neopix
neopix();
delay( 1000 );
// Blue
red = 0; // Red
green = 0; // Green
blue = 255; // Blue
iNeo = 2; // Neopix
neopix();
delay( 1000 );
// White
red = 255; // Red
green = 255; // Green
blue = 255; // Blue
iNeo = 3; // Neopix
neopix();
delay( 1000 );
// Pink
red = 255; // Red
green = 153; // Green
blue = 203; // Blue
iNeo = 4; // Neopix
neopix();
delay( 1000 );
// Orange
red = 255; // Red
green = 102; // Green
blue = 0; // Blue
iNeo = 5; // Neopix
neopix();
delay( 1000 );
// Violet
red = 204; // Red
green = 102; // Green
blue = 204; // Blue
iNeo = 6; // Neopix
neopix();
delay( 1000 );
// Yellow
red = 255; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = 7; // Neopix
neopix();
delay( 1000 );
break;
case 9:
// NeoPixels
// Red
red = 255; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = 7; // Neopix
neopix();
delay( 1000 );
// Green
red = 0; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = 6; // Neopix
neopix();
delay( 1000 );
// Blue
red = 0; // Red
green = 0; // Green
blue = 255; // Blue
iNeo = 5; // Neopix
neopix();
delay( 1000 );
// White
red = 255; // Red
green = 255; // Green
blue = 255; // Blue
iNeo = 4; // Neopix
neopix();
delay( 1000 );
// Pink
red = 255; // Red
green = 153; // Green
blue = 203; // Blue
iNeo = 3; // Neopix
neopix();
delay( 1000 );
// Orange
red = 255; // Red
green = 102; // Green
blue = 0; // Blue
iNeo = 2; // Neopix
neopix();
delay( 1000 );
// Violet
red = 204; // Red
green = 102; // Green
blue = 204; // Blue
iNeo = 1; // Neopix
neopix();
delay( 1000 );
// Yellow
red = 255; // Red
green = 255; // Green
blue = 0; // Blue
iNeo = 0; // Neopix
neopix();
delay( 1000 );
break;
}
}
neopix.ino
// NeoPixels
void neopix() {
// Brightness
iBri = analogRead(iBriPin);
// iBri apply the calibration to the sensor reading
iBri = map(iBri, iBriMin, iBriMax, 0, 255);
// iBri in case the sensor value is outside the range seen during calibration
iBri = constrain(iBri, 0, 255);
pixels.setBrightness( iBri );
// Pixels.Color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
setup.ino
// Setup
void setup()
{
// set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc"); // Don luc
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Rotary Switch"); // Rotary Switch
delay(5000);
// Clear
RGBLCDShield.clear();
// NeoPixels
pixels.begin(); // This initializes the NeoPixel library
// NeoPixels
for(int y=0; y < NUMPIXELS; y++)
{
// Black
red = 0; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = y; // Neopix
neopix();
}
}
Don Luc