——
#DonLucElectronics #DonLuc #DFRobot #BME280 #CCS811 #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #Adafruit #SparkFun #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
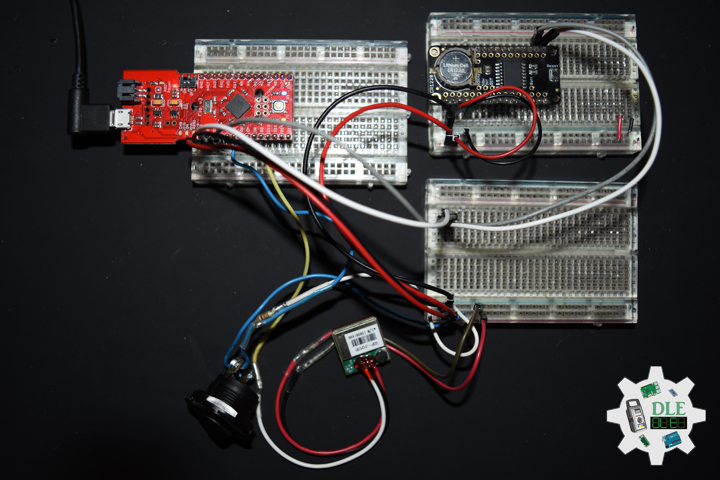
SparkFun Environmental Combo Breakout – CCS811/BME280
The SparkFun CCS811/BME280 Environmental Combo Breakout takes care of all your atmospheric-quality sensing needs with the popular CCS811 and BME280 ICs. This unique breakout provides a variety of environmental data, including barometric pressure, humidity, temperature, TVOCs and equivalent eCO2 levels. To make it even easier to use this breakout, all communication is enacted exclusively via I2C, utilizing our handy Qwiic system.
The CCS811 is an exceedingly popular sensor, providing readings for equivalent eCO2 in the parts per million (PPM) and total volatile organic compounds in the parts per billion (PPB). The CCS811 also has a feature that allows it to fine-tune its readings if it has access to the current humidity and temperature. Luckily for us, the BME280 provides humidity, temperature and barometric pressure. This allows the sensors to work together to give us more accurate readings than they’d be able to provide on their own. We also made it easy to interface with them via I2C.
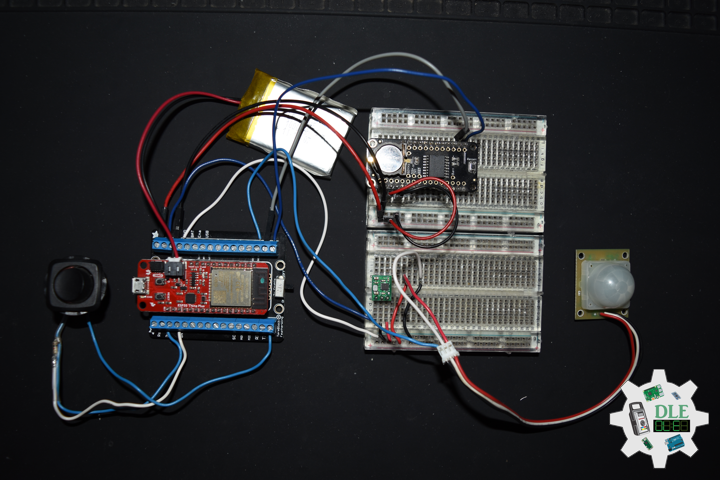
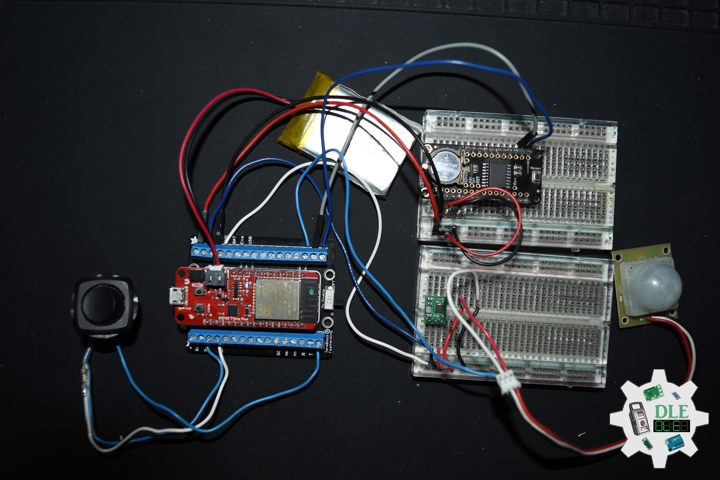
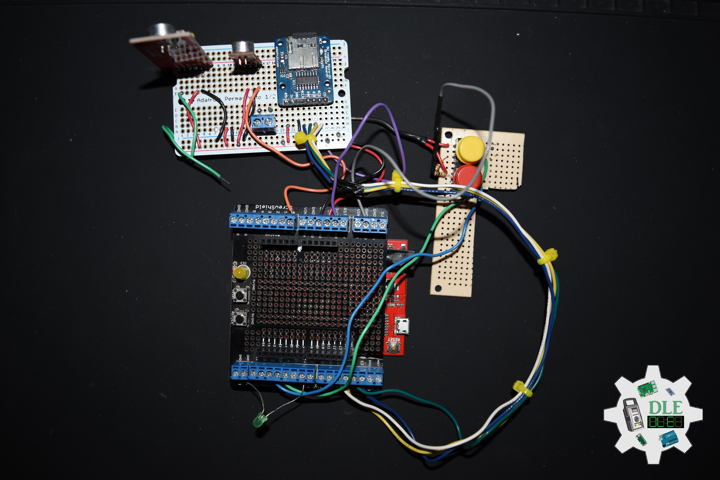
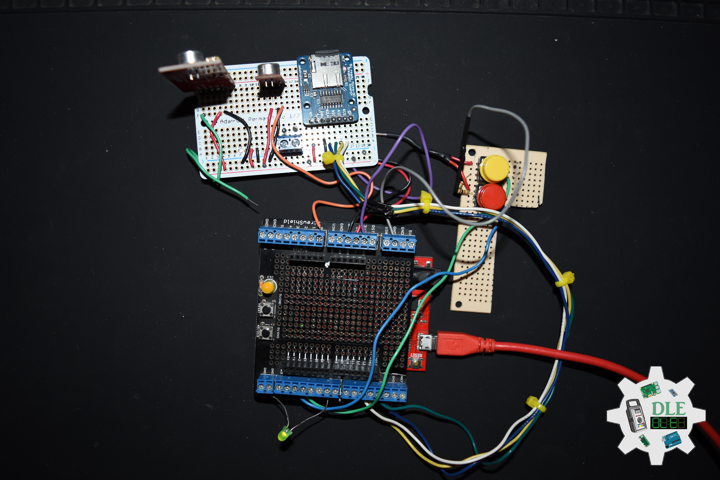
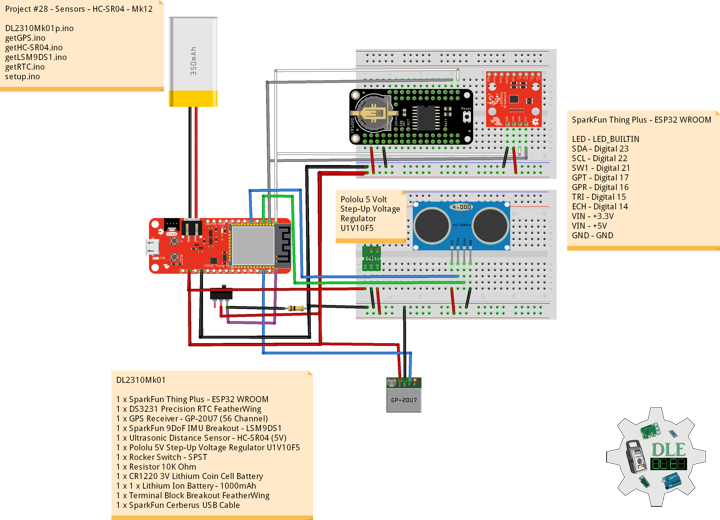
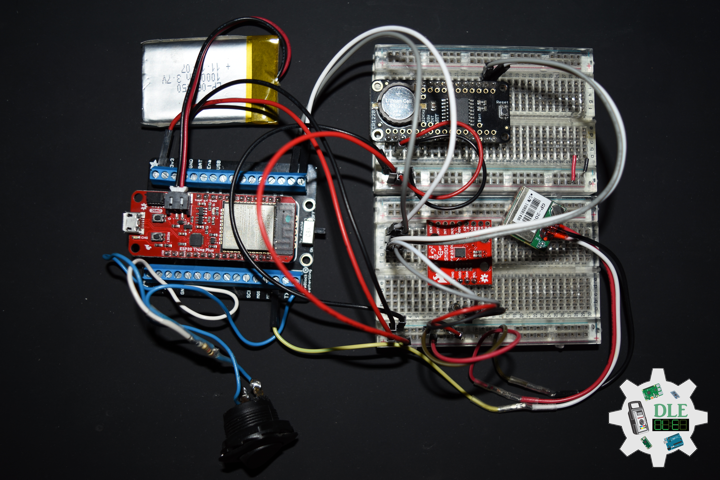
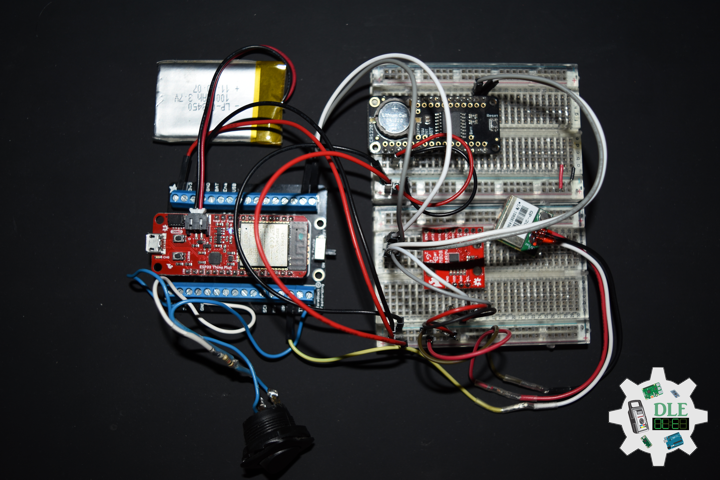
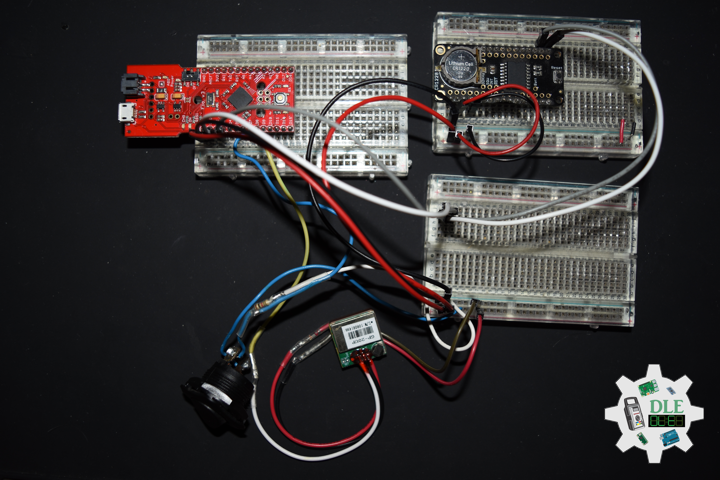
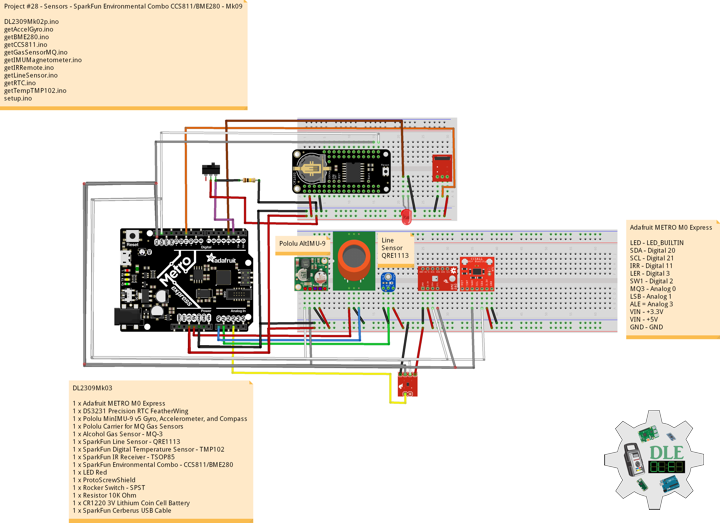
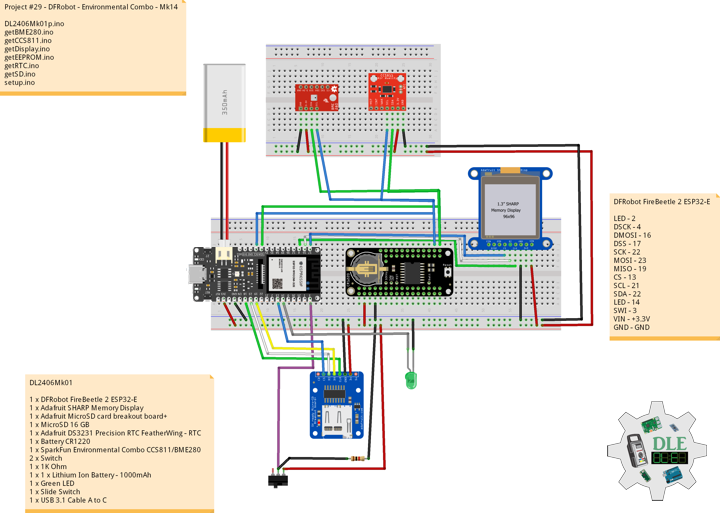
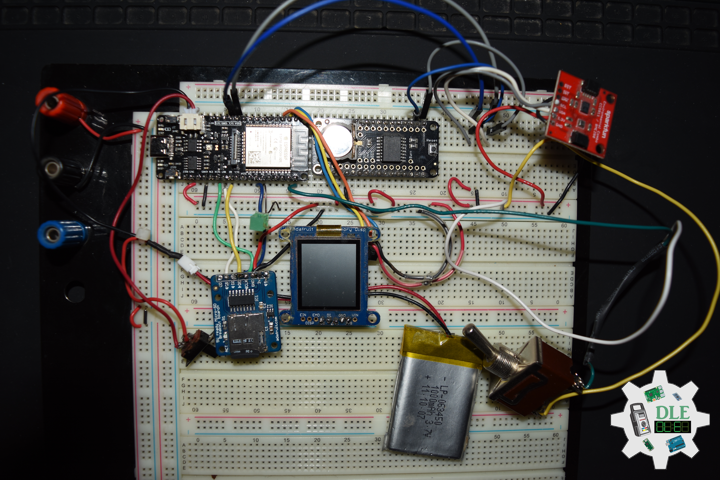
DL2406Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Adafruit DS3231 Precision RTC FeatherWing – RTC
1 x Battery CR1220
1 x SparkFun Environmental Combo CCS811/BME280
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x Slide Switch
1 x USB 3.1 Cable A to C
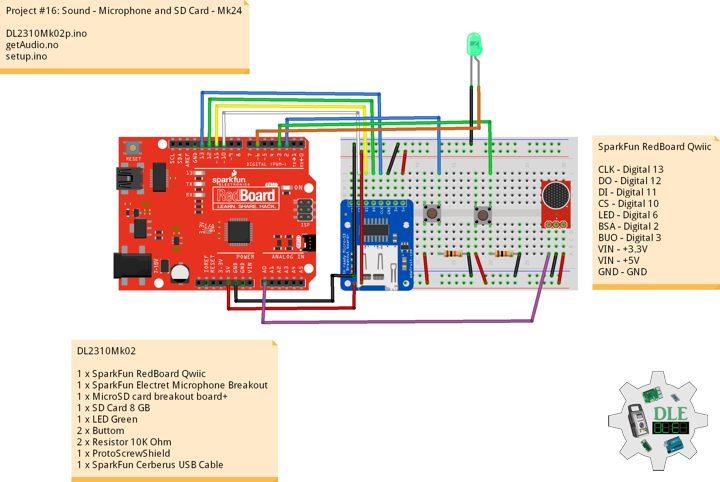
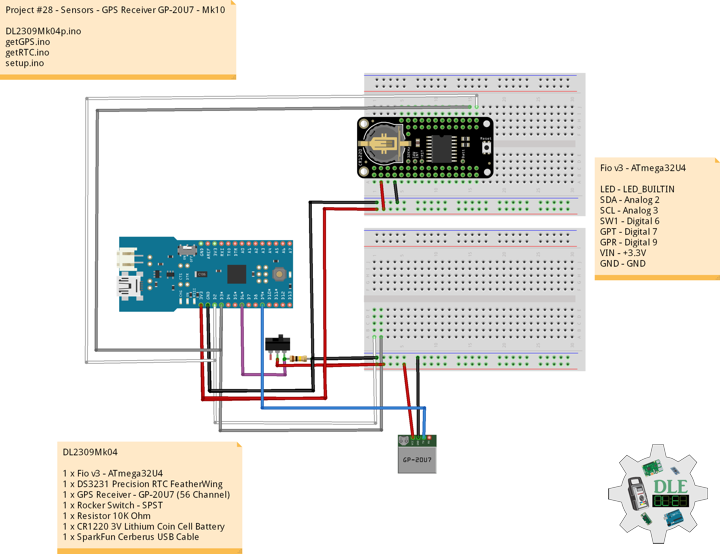
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
SCL – 21
SDA – 22
LED – 14
SWI – 3
VIN – +3.3V
GND – GND
——
DL2406Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
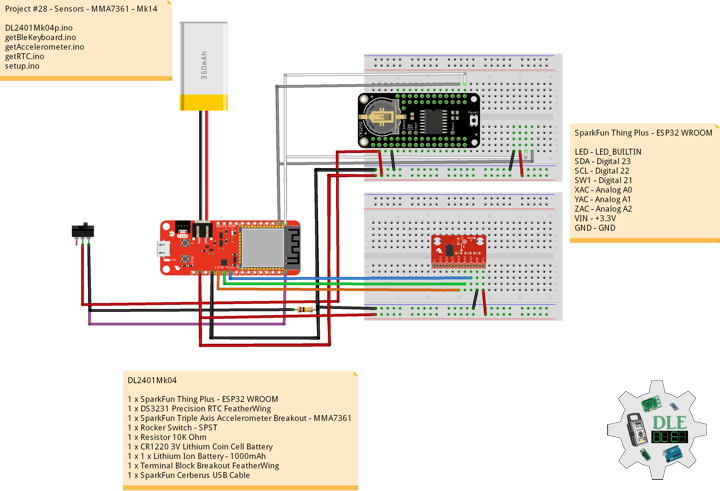
Project #29 - DFRobot - Environmental Combo - Mk14
29-14
DL2406Mk01p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Adafruit DS3231 Precision RTC FeatherWing - RTC
1 x Battery CR1220
1 x SparkFun Environmental Combo CCS811/BME280
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x Slide Switch
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// DS3231 RTC Date and Time
#include <RTClib.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// DS3231 RTC Date and Time
RTC_DS3231 rtc;
String sDate;
String sTime;
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-14";
void loop() {
// DS3231 RTC Date and Time
isRTC();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Display Date, Time, Temperature, Humidity
isDisplayDTTH();
} else {
// Display Date, Time, eCO2 Concentration, tVOC Concentration
isDisplayDTCOVO();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 1 Second
delay(1000);
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity() ;
// Altitude Meters
BMEaltitudeM = myBME280.readFloatAltitudeMeters();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
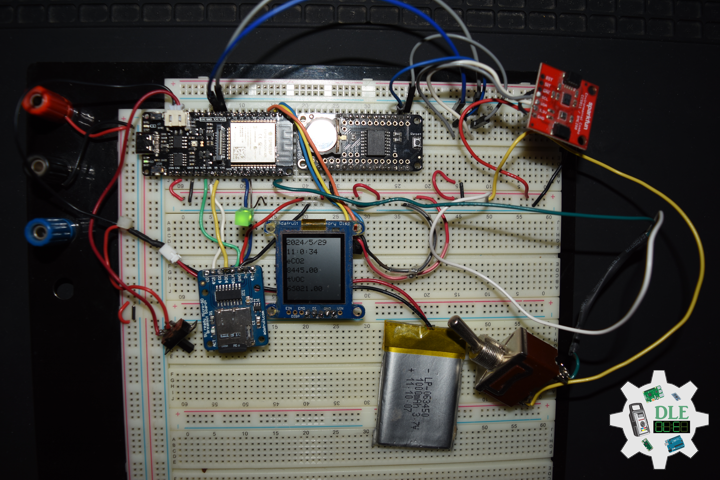
// Display Date, Time, Temperature, Humidity, Altitude and Barometric Pressure
void isDisplayDTTH() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( sDate );
// Time
display.setCursor(0,30);
display.println( sTime );
// Temperature
display.setCursor(0,55);
display.print( BMEtempC );
display.println( "C" );
// Humidity
display.setCursor(0,80);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,105);
display.print( BMEaltitudeM );
display.println( "M" );
// Barometric Pressure
display.setCursor(0,130);
display.println( BMEpressure );
// Refresh
display.refresh();
delay( 100 );
}
// Display Display Date, Time, eCO2 Concentration, tVOC Concentration
void isDisplayDTCOVO() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( sDate );
// Time
display.setCursor(0,30);
display.println( sTime );
// eCO2 Concentration
display.setCursor(0,55);
display.println( "eCO2" );
display.setCursor(0,80);
display.println( CCS811CO2 );
// tVOC Concentration
display.setCursor(0,105);
display.println( "tVOC" );
display.setCursor(0,130);
display.println( CCS811TVOC );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getRTC.ino
// DS3231 RTC Date and Time
// Setup DS3231 RTC
void isSetupRTC() {
if (! rtc.begin()) {
while (1);
}
if (rtc.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
}
}
// DS3231 RTC Date and Time
void isRTC(){
// Date and Time
sDate = "";
sTime = "";
// Date Time
DateTime now = rtc.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// DFR|EEPROM Unique ID|Version|Date|Time|Temperature Celsius|Humidity
//|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|" + sDate + "|" + sTime + "|"
+ String(BMEtempC) + "C|" + String(BMEhumid) + "%|"
+ String(BMEaltitudeM) + " M|" + String(BMEpressure) + "|" + String(CCS811CO2) + "|"
+ String(CCS811TVOC) + "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
// Setup DS3231 RTC
isSetupRTC();
//MicroSD Card
setupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc