——
#donluc #meditation #glassesledmeditation #musicshield #neopixels #arduino #sparkfun #project #programming #electronics #microcontrollers #consultant #zoom #patreon #videoblog
——
——
——
——
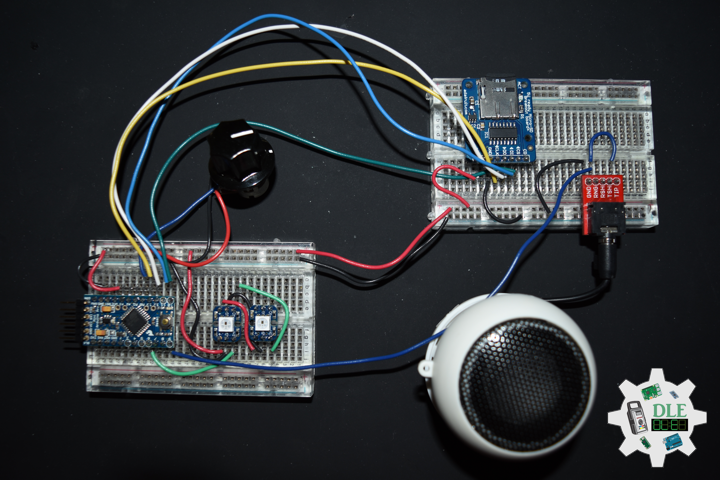
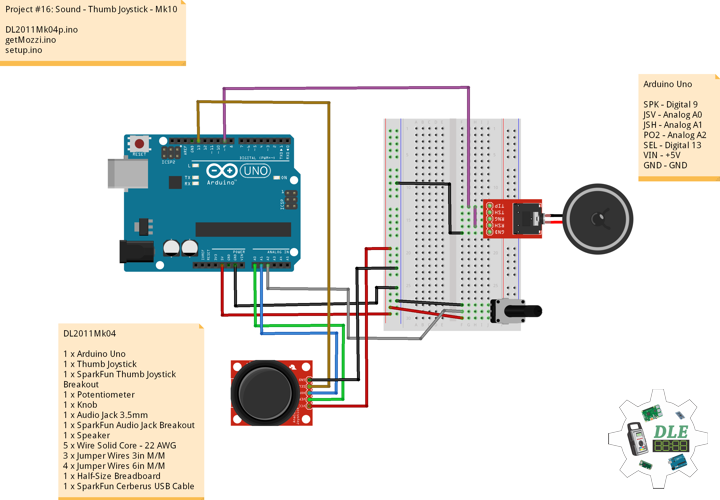
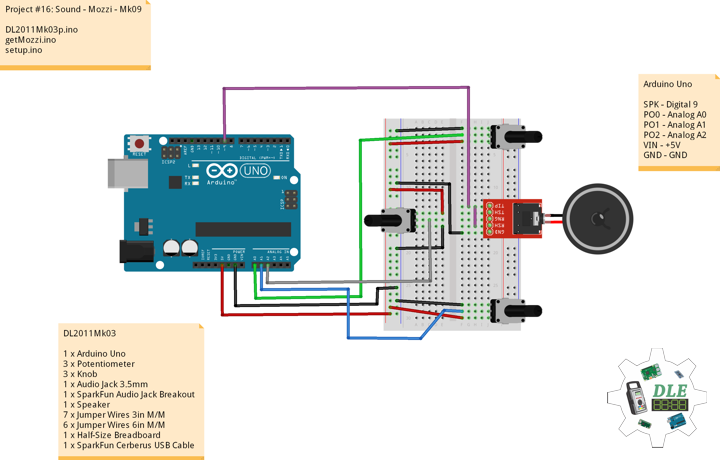
Music Shield V1.1
The Music Shield is a professional audio codec.It can work with Arduino and Arduino Mega. It is based on VS1053b IC, and can play a variety of music formats stored on MicroSD cards with the provided Arduino Library.
Features
- Arduino and Arduino Mega compatible
- 2 control-push buttons and 1 knob switch
- Plays music from micro SD cards
- Decodes: MP3, WAV, MIDI, Ogg Vorbis
- Fat16 library
- I2S interface for external DAC
- Headphone/Line Out for playback
- Excellent sound quality with ±1dB frequency response
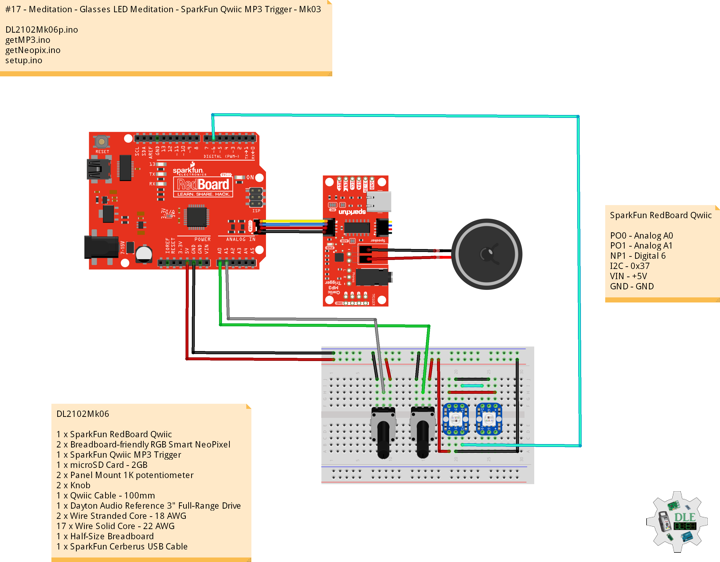
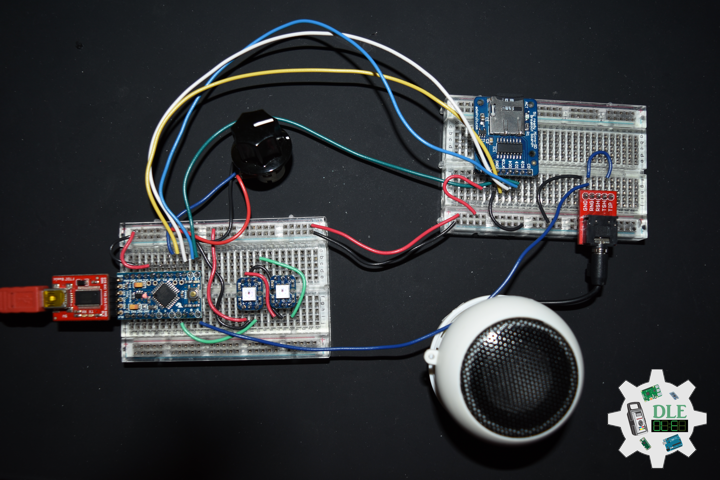
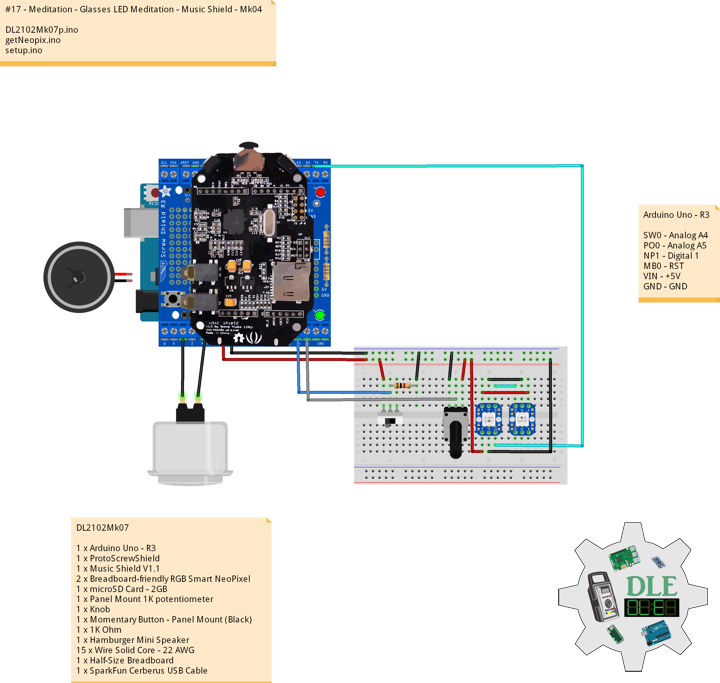
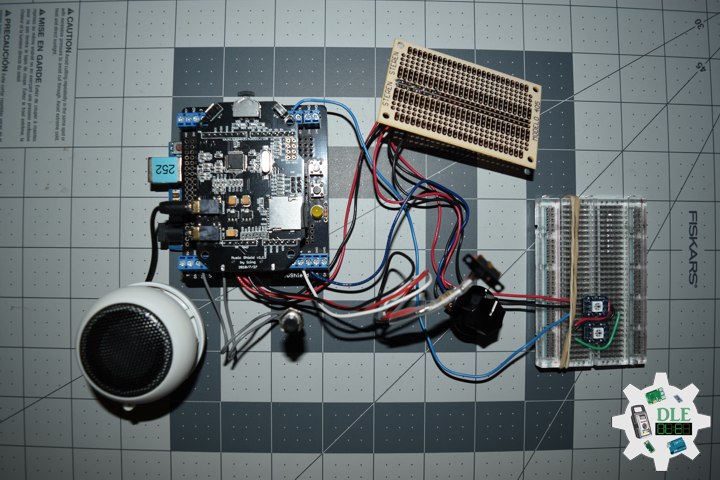
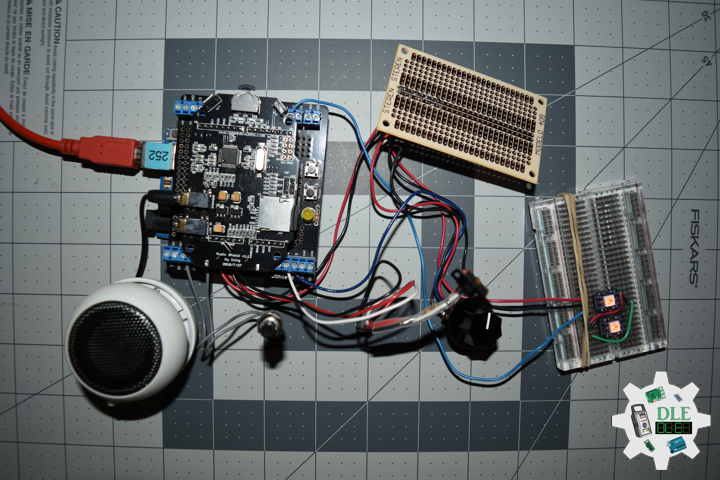
DL2102Mk07
1 x Arduino Uno – R3
1 x ProtoScrewShield
1 x Music Shield V1.1
2 x Breadboard-friendly RGB Smart NeoPixel
1 x microSD Card – 2GB
1 x Panel Mount 1K potentiometer
1 x Knob
1 x Momentary Button – Panel Mount (Black)
1 x 1K Ohm
1 x Hamburger Mini Speaker
15 x Wire Solid Core – 22 AWG
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
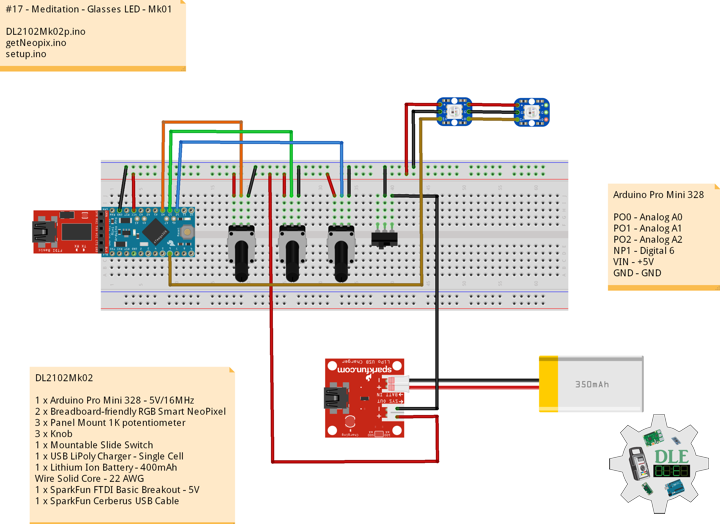
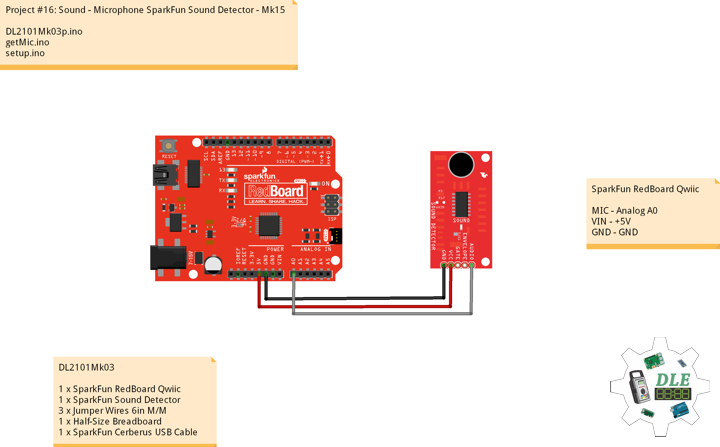
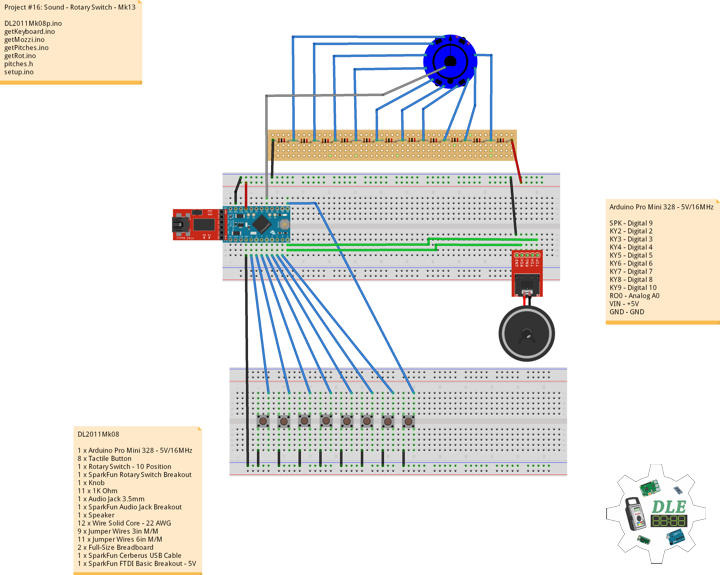
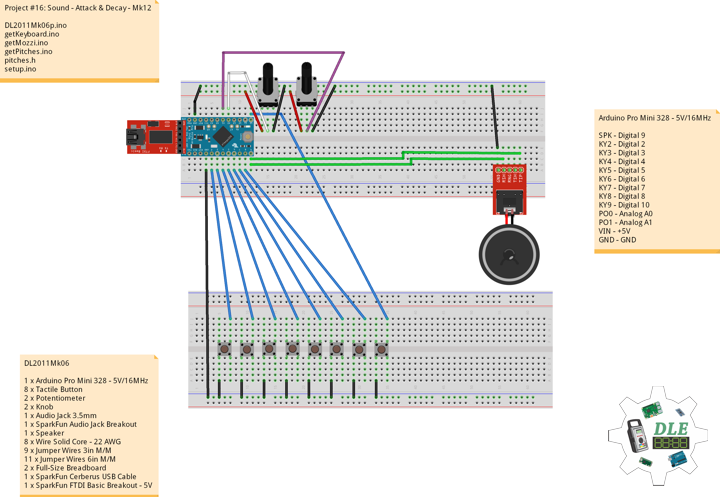
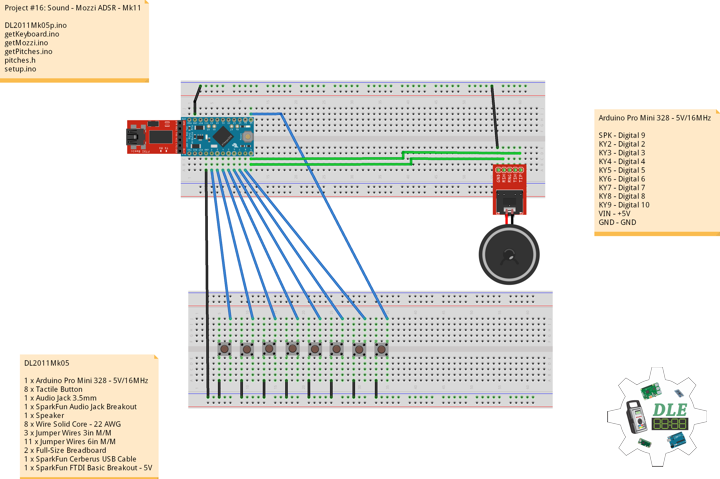
Arduino Uno – R3
SW0 – Analog A4
PO0 – Analog A5
NP1 – Digital 1
MB0 – RST
VIN – +5V
GND – GND
DL2102Mk07p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// #17 - Meditation - Glasses LED Meditation - Music Shield - Mk04
// 02-07
// DL2102Mk07p.ino 17-04
// DL2102Mk07
// 1 x Arduino Uno - R3
// 1 x ProtoScrewShield
// 1 x Music Shield V1.1
// 2 x Breadboard-friendly RGB Smart NeoPixel
// 1 x microSD Card - 2GB
// 1 x Panel Mount 1K potentiometer
// 1 x Knob
// 1 x Momentary Button - Panel Mount (Black)
// 1 x 1K Ohm
// 1 x Hamburger Mini Speaker
// 15 x Wire Solid Core - 22 AWG
// 1 x Half-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// Include the Library Code
// NeoPixel
#include <Adafruit_NeoPixel.h>
// Fat 16
#include <Fat16.h>
#include <Fat16Util.h>
// New SPI
#include <NewSPI.h>
// Arduino
#include <arduino.h>
// Music Player
#include "pins_config.h"
#include "vs10xx.h"
#include "newSDLib.h"
#include "MusicPlayer.h"
// NeoPixels
#define PIN 1
// How many NeoPixels are attached to the Arduino
#define NUMPIXELS 2
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Color
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Panel Mount 1K potentiometer
// Brighten
int BrightenValue = 0;
// Color
const int iSensorColor = A5;
int y = 0;
int ColorVal = 0;
// Mountable Slide Switch
int iSS1 = A4;
// State
int iSS1State = 0;
// Music Player
MusicPlayer myplayer;
// Software Version Information
String sver = "17-04";
void loop() {
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// Range Color
isRangeColor();
} else {
// Add To Playlist
myplayer.addToPlaylist("F001.mp3");
myplayer.addToPlaylist("F002.mp3");
myplayer.addToPlaylist("F003.mp3");
myplayer.addToPlaylist("F004.mp3");
myplayer.addToPlaylist("F005.mp3");
// There are two songs in the playlist
myplayer.playList();
while(1);
}
}
getNeopix.ino
// Neopix
void isNeopix() {
for(int i=0; i<NUMPIXELS; i++){
// Neopix
// BrightenValue = 40
BrightenValue = 40;
pixels.setBrightness( BrightenValue );
// The pixels.Color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor(i, pixels.Color(red,green,blue));
// This sends the updated pixel color to the hardware
pixels.show();
}
}
// Range Color
void isRangeColor() {
// Range Color
ColorVal = analogRead( iSensorColor );
y = (ColorVal / 127);
switch ( y ) {
case 0:
// Blue
red = 0;
green = 102;
blue = 204;
isNeopix();
break;
case 1:
// Yellow
red = 255;
green = 255;
blue = 0;
isNeopix();
break;
case 2:
// Pink
red = 255;
green = 153;
blue = 203;
isNeopix();
break;
case 3:
// White
red = 255;
green = 255;
blue = 255;
isNeopix();
break;
case 4:
// Green
red = 0;
green = 255;
blue = 0;
isNeopix();
break;
case 5:
// Orange
red = 255;
green = 102;
blue = 0;
isNeopix();
break;
case 6:
// Violet
red = 204;
green = 102;
blue = 204;
isNeopix();
break;
case 7:
// Red
red = 255;
green = 0;
blue = 0;
isNeopix();
break;
}
}
setup.ino
// Setup
void setup() {
// This initializes the NeoPixel library
pixels.begin();
delay(50);
// Slide Switch
pinMode(iSS1, INPUT);
// Music Player
// Will initialize the hardware and set default mode to be normal
myplayer.begin();
}
Music
F001.mp3
F002.mp3
F003.mp3
F004.mp3
F005.mp3
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLE/LucPaquinCVEngMk2021a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc