#25 – Movement
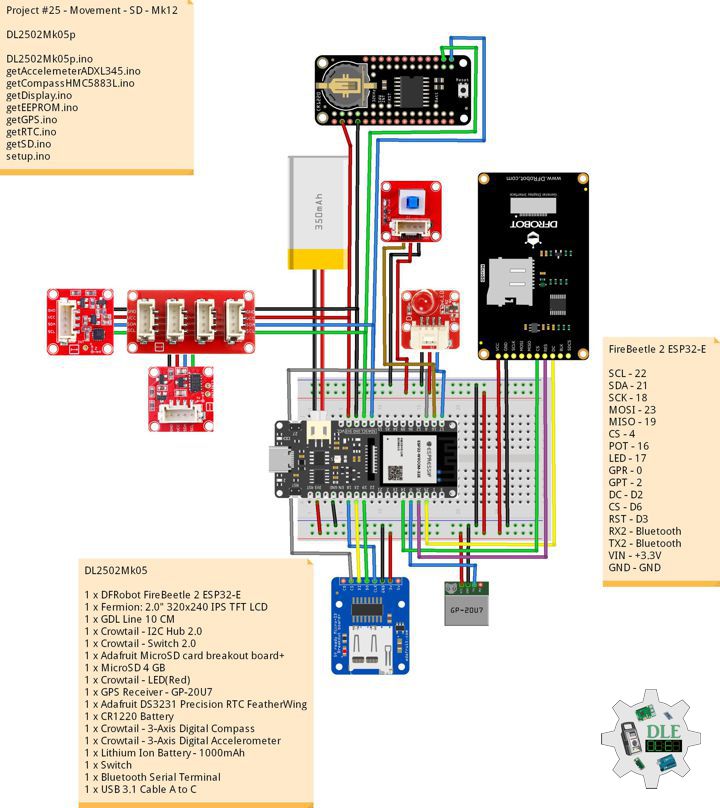
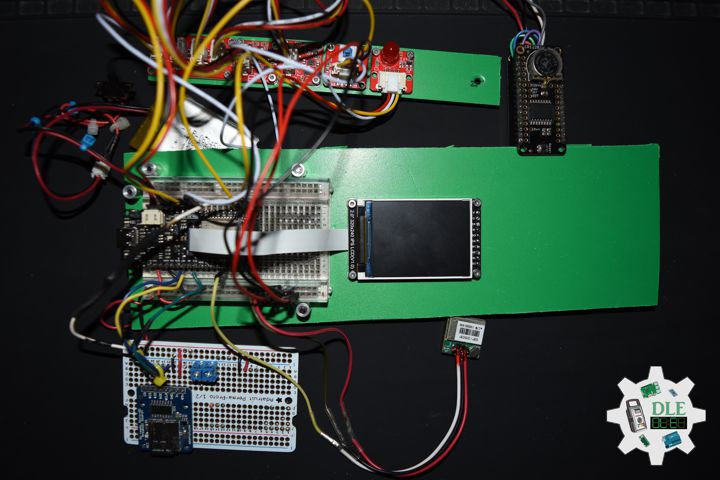
Project #25 – Movement – SD – Mk12
——
#DonLucElectronics #DonLuc #SD #GPS #RTC #EEPROM #Compass #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
MicroSD Card Module
There are different microSD card modules compatible with the ESP32. We’re using the microSD card module it communicates using SPI communication protocol. You can use any other microSD card module with an SPI interface. This microSD card module is also compatible with other microcontrollers like the Arduino boards. To learn how to use the microSD card module with the Arduino. You can connect it to the ESP32 using the default SPI pins.
DL2502Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – Switch 2.0
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 4 GB
1 x Crowtail – LED(Red)
1 x GPS Receiver – GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
SCK – 18
MOSI – 23
MISO – 19
CS – 4
POT – 16
LED – 17
GPR – 0
GPT – 2
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2502Mk05p
DL2502Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - SD - Mk12
25-12
DL2502Mk05p.ino
DL2502Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - Switch 2.0
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 4 GB
1 x Crowtail - LED(Red)
1 x GPS Receiver - GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// RTC (Real-Time Clock)
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// Define LED Red
int iLED = 17;
// Switch
int iSwitch = 16;
// Variable for reading the Switch status
int iSwitchState = 0;
// MicroSD Card
const int chipSelect = 4;
String zzzzzz = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(1);
// GPS Receiver
#define gpsRXPIN 0
// This one is unused and doesnt have a conection
#define gpsTXPIN 2
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALTM;
// GPS Altitude Feet
String TargetALTF;
// GPS Status
String GPSSt = "";
// RTC (Real-Time Clock)
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
String tempRTC = "";
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-12";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// RTC (Real-Time Clock)
isRTC();
// isGPS
isGPS();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// LED Red HIGH
digitalWrite(iLED, HIGH);
// MicroSD Card
isSD();
} else {
// LED Red LOW
digitalWrite(iLED, LOW);
}
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// SD
screen.setCursor(0, 60);
screen.println("SD");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter and Compass, ADXL345 and HMC5883L
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
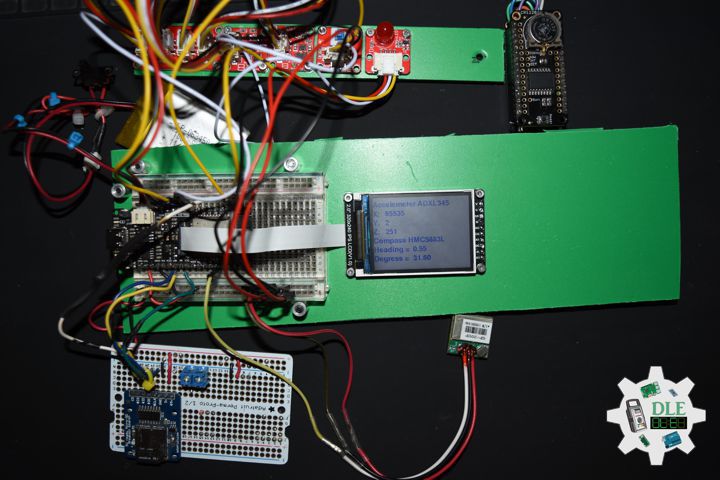
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALTM = "";
TargetALTF = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALTM = String( z, DEC);
// Feet
int zz = gps.altitude.feet();
TargetALTF = String( zz, DEC);
}
}
getRTC.ino
// RTC (Real-Time Clock)
// Setup RTC
void isSetupRTC(){
// RTC (Real-Time Clock)
rtc.begin();
// RTC Lost Power
if (rtc.lostPower()) {
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0))
}
}
// RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// Temperature
tempRTC = rtc.getTemperature();
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DLE|EEPROM Unique ID|Version|Date|Time|Temperature|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Compass Heading|Compass Degress|
//GPS|Latitude|Longitude|GPS Date|GPS Time|
//GPS Speed M/S|GPS Speed Km/h|
//GPS Altitude Feet|GPS Altitude Meters|*\r
zzzzzz = "DLE|" + uid + "|" + sver + "|" + String( dateRTC ) + "|"
+ String( timeRTC ) + "|" + String( tempRTC ) + "|"
+ String(x) + "|" + String(y) + "|" + String(z) + "|"
+ String(ax) + "|" + String(ay) + "|" + String(az) + "|"
+ String( heading ) + "|" + String( headingDegrees ) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|" + String(TargetLon) + "|"
+ String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetSKH) + "|"
+ String(TargetALTF) + "|" + String(TargetALTM)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dledata.txt", msg );
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// zzzzzz
FullString = zzzzzz;
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2502Mk05");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// Wire
Wire.begin();
// Delay
delay(100);
// Setup RTC
isSetupRTC();
// Delay
delay(100);
//MicroSD Card
isSetupSD();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// iLED Red
pinMode(iLED, OUTPUT);
// LED Red LOW
digitalWrite(iLED, LOW);
// Delay
delay( 100 );
// Switch
pinMode(iSwitch,INPUT);
// Delay
delay( 100 );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
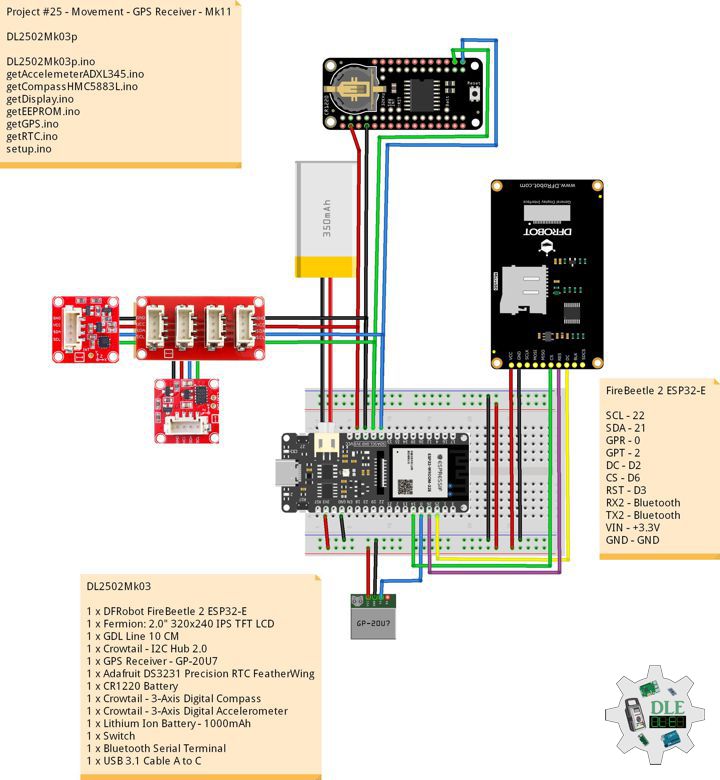
Project #25 – Movement – GPS Receiver – Mk11
——
#DonLucElectronics #DonLuc #GPS #RTC #EEPROM #Compass #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
Global Positioning System (GPS)
The Global Positioning System (GPS) is a satellite-based radionavigation system owned by the United States government and operated by the United States Space Force. It is one of the global navigation satellite systems (GNSS) that provides geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. Obstacles such as mountains and buildings block the relatively weak GPS signals.
GPS Receiver – GP-20U7
The GP-20U7 is a compact GPS receiver with a built-in high performances All-In-One GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
DL2502Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x GPS Receiver – GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
GPR – 0
GPT – 2
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2502Mk03p
DL2502Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - GPS Receiver - Mk11
25-11
DL2502Mk03p.ino
DL2502Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x GPS Receiver - GP-20U7
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// RTC (Real-Time Clock)
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// ESP32 HardwareSerial
HardwareSerial tGPS(1);
// GPS Receiver
#define gpsRXPIN 0
// This one is unused and doesnt have a conection
#define gpsTXPIN 2
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALTM;
// GPS Altitude Feet
String TargetALTF;
// GPS Status
String GPSSt = "";
// RTC (Real-Time Clock)
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-11";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// isEEPROM
isEEPROM();
// RTC (Real-Time Clock)
isRTC();
// isGPS
isGPS();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// GPS Receiver
screen.setCursor(0, 60);
screen.println("GPS Receiver");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter and Compass, ADXL345 and HMC5883L
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
// isEEPROM
void isEEPROM(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// EEPROM
FullString = "EEPROM = " + String( uid ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Latitude
FullString = "Latitude = " + String( TargetLat ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Longitude
FullString = "Longitude = " + String( TargetLon ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// GPS Status
FullString = "GPS Status = " + String( GPSSt ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Date
FullString = "Date = " + String( TargetDat ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// FullString
// Time
FullString = "Time = " + String( TargetTim ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// FullString
// GPS Speeds M/S
FullString = "GPS Speeds M/S = " + String( TargetSMS ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// GPS Speeds Km/h
FullString = "GPS Speeds Km/h = " + String( TargetSKH ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Altitude
TargetALTM = "";
TargetALTF = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALTM = String( z, DEC);
// Feet
int zz = gps.altitude.feet();
TargetALTF = String( zz, DEC);
}
// FullString
//GPS Altitude Meters
FullString = "GPS Altitude Meters = " + String( TargetALTM ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// GPS Altitude Feet
FullString = "GPS Altitude Feet = " + String( TargetALTF ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getRTC.ino
// RTC (Real-Time Clock)
// Setup RTC
void isSetupRTC(){
// RTC (Real-Time Clock)
rtc.begin();
// RTC Lost Power
if (rtc.lostPower()) {
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0))
}
}
// RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Date
FullString = "Date = " + String( timeRTC ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Time
FullString = "Time = " + String( dateRTC ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Temperature
FullString = "Temperature = " + String( rtc.getTemperature() )
+ String( " C" ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2502Mk03");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// Wire
Wire.begin();
// Delay
delay(100);
// Setup RTC
isSetupRTC();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
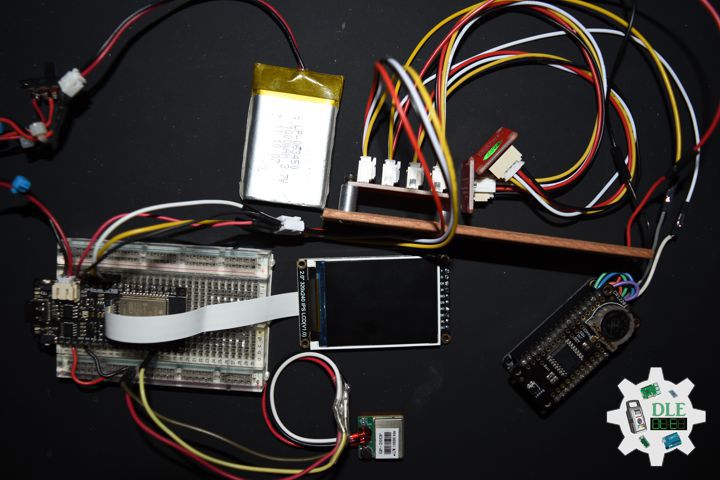
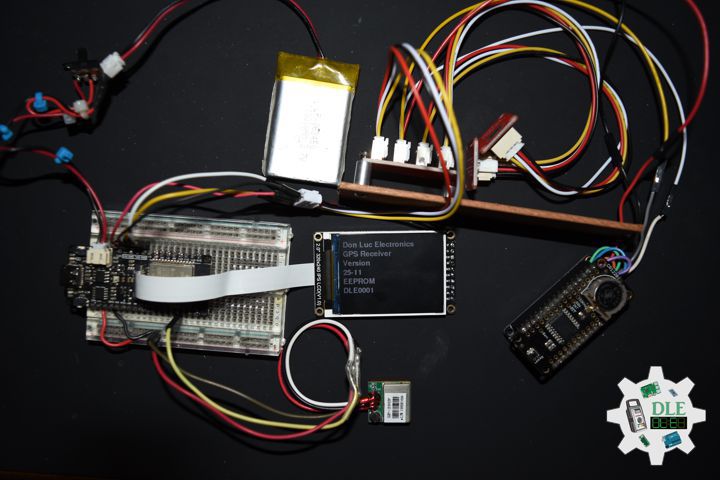
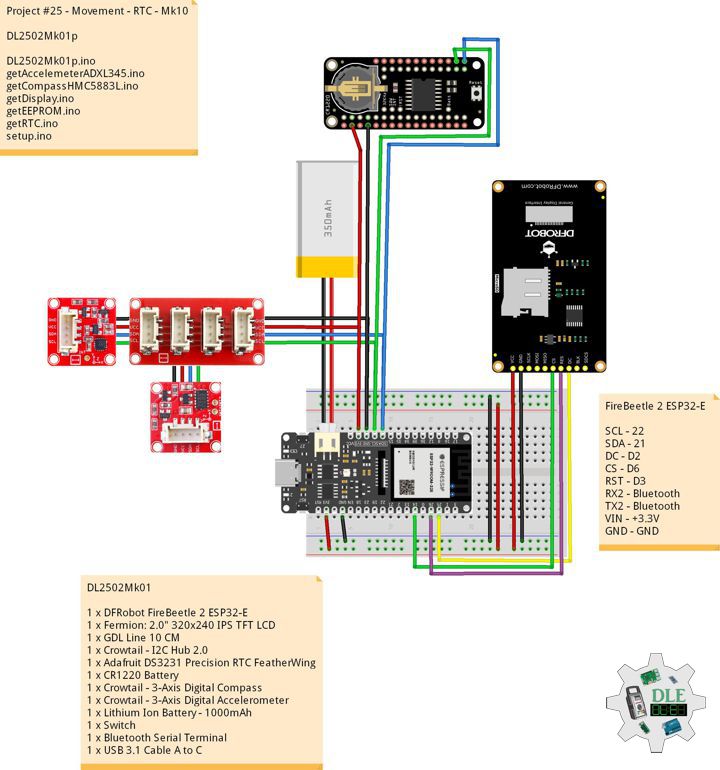
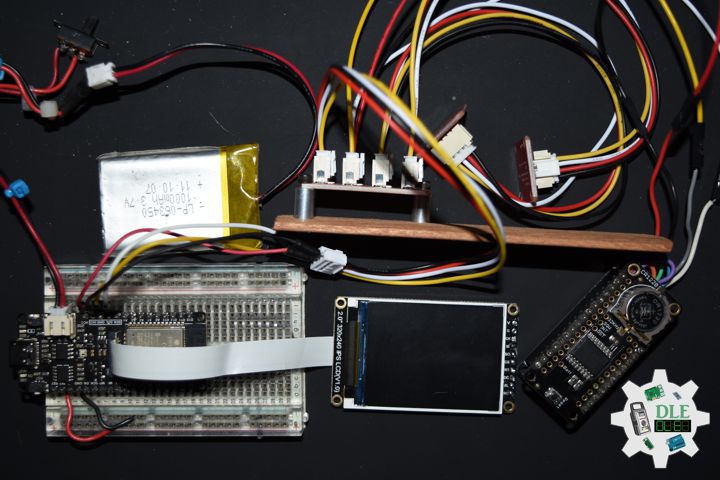
Project #25 – Movement – RTC – Mk10
——
#DonLucElectronics #DonLuc #RTC #EEPROM #Compass #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——

——
Adafruit DS3231 Precision RTC FeatherWing
This is the DS3231 Precision RTC FeatherWing: it adds an extremely accurate I2C-integrated Real Time Clock (RTC) with a Temperature Compensated Crystal Oscillator to any Feather main board. This RTC is the most precise you can get in a small, low power package. Most RTCs use an external 32kHz timing crystal that is used to keep time with low current draw. And that’s all well and good, but those crystals have slight drift, particularly when the temperature changes (the temperature changes the oscillation frequency very very very slightly but it does add up!) This RTC is in a beefy package because the crystal is inside the chip! And right next to the integrated crystal is a temperature sensor. That sensor compensates for the frequency changes by adding or removing clock ticks so that the timekeeping stays on schedule. With a CR1220 12mm coin cell plugged into the top of the FeatherWing, you can get years of precision timekeeping, even when main power is lost. Great for datalogging and clocks, or anything where you need to really know the time.
DL2502Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2502Mk01p
DL2502Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - RTC - Mk10
25-10
DL2502Mk01p.ino
DL2502Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Adafruit DS3231 Precision RTC FeatherWing
1 x CR1220 Battery
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// RTC (Real-Time Clock)
#include "RTClib.h"
// RTC (Real-Time Clock)
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-10";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// isEEPROM
isEEPROM();
// RTC (Real-Time Clock)
isRTC();
// Accelemeter and Compass, ADXL345 and HMC5883L
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Real-Time Clock
screen.setCursor(0, 60);
screen.println("Real-Time Clock");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter and Compass, ADXL345 and HMC5883L
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
// isEEPROM
void isEEPROM(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// EEPROM
FullString = "EEPROM = " + String( uid ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getRTC.ino
// RTC (Real-Time Clock)
// Setup RTC
void isSetupRTC(){
// RTC (Real-Time Clock)
rtc.begin();
// RTC Lost Power
if (rtc.lostPower()) {
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0))
}
}
// RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Date
FullString = "Date = " + String( timeRTC ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Time
FullString = "Time = " + String( dateRTC ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Temperature
FullString = "Temperature = " + String( rtc.getTemperature() )
+ String( " C" ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2502Mk01");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// Wire
Wire.begin();
// Delay
delay(100);
// Setup RTC
isSetupRTC();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
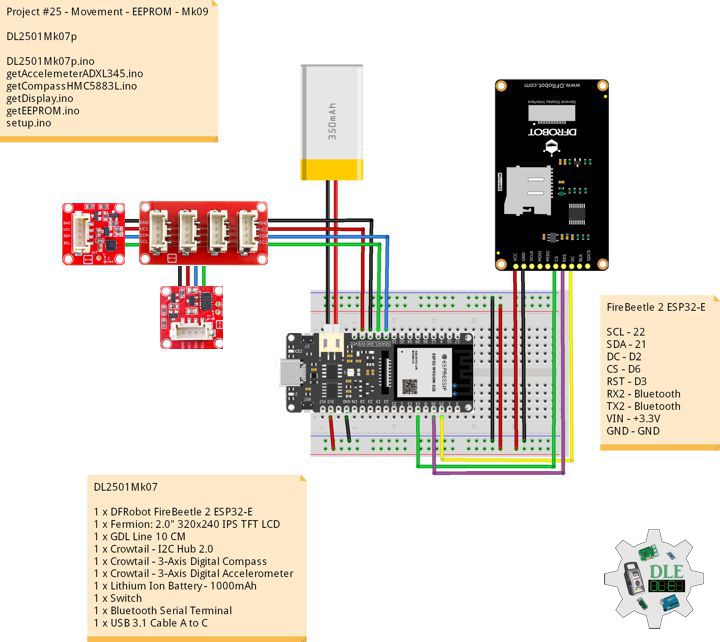
Project #25 – Movement – EEPROM – Mk09
——
#DonLucElectronics #DonLuc #EEPROM #HMC5883L #Compass #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
——
——
——
EEPROM
EEPROM (Electrically Erasable Programmable Read-only Memory) is a type of non-volatile memory. EEPROM is a type of non-volatile ROM that enables individual bytes of data to be erased and reprogrammed. That is why EEPROM chips are known as byte erasable chips. EEPROM is usually used to store small amounts of data in computing and other electronic devices. It is used in computers, usually integrated in microcontrollers such as smart cards and remote keyless systems, or as a separate chip device, to store relatively small amounts of data by allowing individual bytes to be erased and reprogrammed.
The microcontroller on the Arduino boards have 512 bytes of EEPROM: memory whose values are kept when the board is turned off. Functions in the EEPROM class are automatically included with the platform for your board, meaning you do not need to install any external libraries. The supported microcontrollers on the various Arduino have different amounts of EEPROM: 1024 bytes on the ATmega328P, 512 bytes on the ATmega168 and ATmega8, 4 KB (4096 bytes) on the ATmega1280 and ATmega2560. The Arduino boards have an emulated EEPROM space of 1024 bytes. The EEPROM library on ESP32 provides a reliable way to store data persistently, so that it remains accessible even when the power supply is disconnected. Unlike RAM, the data we save with the EEPROM library does not get lost when power is cut. This feature makes it an ideal choice for retaining configurations, settings, and other important data in embedded devices like the ESP32.
DL2501Mk07
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DLE-EEPROM-UID-ESP32Mk001
DLE-EEPROM-UID-ESP32Mk001.ino
/* ***** Don Luc Electronics © ******
Software Version Information
DLE-EEPROM-UID-ESP32Mk001
ver: ESPMk001
EEPROM with unique ID
*/
// Include Library Code
// EEPROM library to read and write EEPROM with unique ID for unit
#include "EEPROM.h"
// The current address in the EEPROM (i.e. which byte
// we're going to write to next)
#define EEPROM_SIZE 64
// Software Version Information
String sver = "ESPMk001";
// Unit ID information
String uid = "DLE0001";
// Read Unique ID
// String ruid = "";
void loop()
{
// <== Write and Read EEPROM
isEEPROMw();
}
getEEPROM.ino
// getEEPROM
// Write and Read EEPROM with Unique ID for Unit
void isEEPROMw() {
// EEPROM
int incb = 0;
int v = 0;
String msg = "";
String emp = "";
String ruid = "";
// Set Unit ID
// The message starts with sid then is followed by 5 characters
// First clear a string buffer
emp = "";
// Loop through the 7 ID characters and write their ASCII (byte) value to the EEPROM
for (int x = 0; x < 7; x++)
{
// Get ASCII value of character
v = int(uid.charAt(x)); // + 5));
// Add the actual character to the buffer so we can send it back to the PC
emp = emp + uid.charAt(x + 5);
// Write the value to the EEPROM
EEPROM.write(x, v);
EEPROM.commit();
}
delay( 500 );
// Write EEPROM with Unique ID for Unit
Serial.println( "Write ID Information");
// Read ID Information
// Unit ID
for (int y = 0; y < 7; y++)
{
ruid = ruid + char(EEPROM.read(y));
}
// Read ID Information
Serial.print( "Read ID Information: ");
Serial.println( ruid );
Serial.println( "Ok!" );
ruid = "";
delay( 5000 );
}
setup.ino
// Setup
void setup()
{
// EEPROM with unique ID
EEPROM.begin(EEPROM_SIZE);
// Open the serial port at 9600 bps:
Serial.begin(9600);
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
}
——
DL2501Mk07p
DL2501Mk07p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - EEPROM - Mk09
25-09
DL2501Mk07p.ino
DL2501Mk07
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "25-09";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// isEEPROM
isEEPROM();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// EEPROM
screen.setCursor(0, 60);
screen.println("EEPROM");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// Accelemeter ADXL345
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
// isEEPROM
void isEEPROM(){
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// EEPROM
FullString = "EEPROM = " + String( uid ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk07");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #25 – Movement – HMC5883L – Mk08
——
#DonLucElectronics #DonLuc #HMC5883L #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
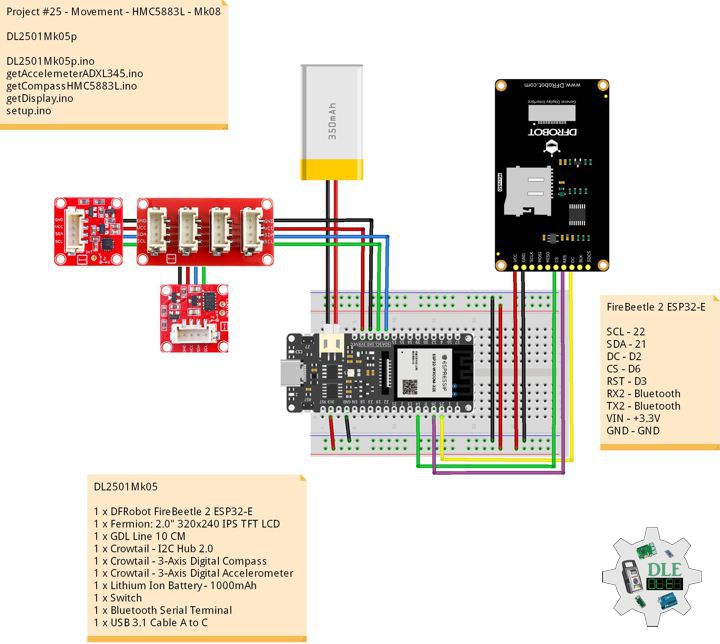
——
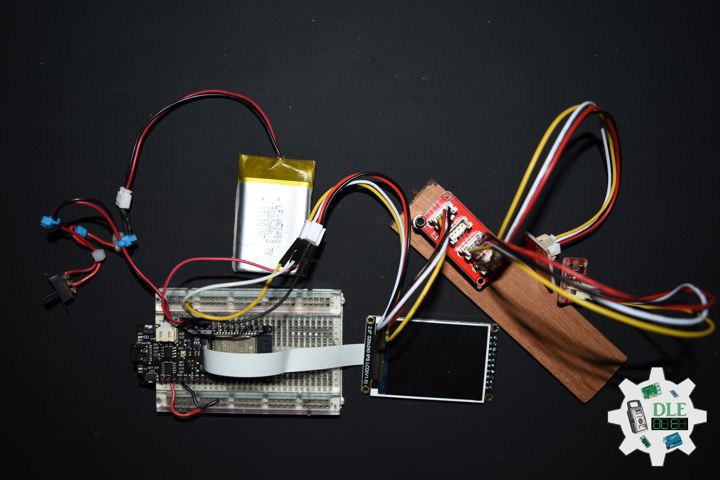
——
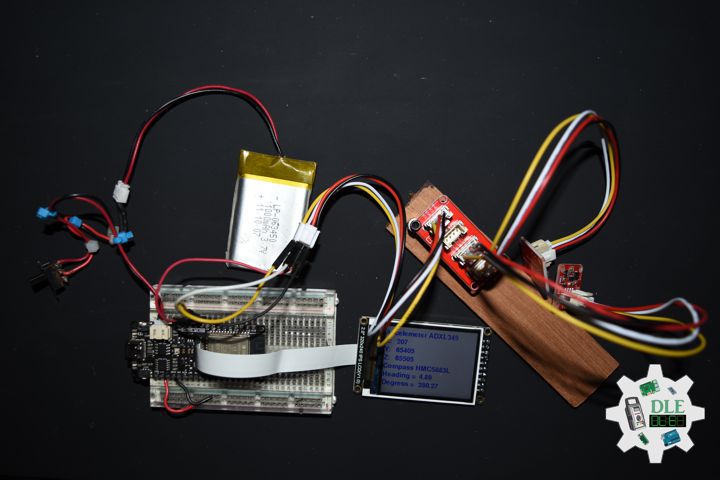
——
Crowtail – 3-Axis Digital Compass
Crowtail-3-Axis Compass module, a member of Crowtail family uses I²C based Honeywell HMC5883L digital compass. This ASIC is equipped with high resolution HMC118X magneto-resistive sensors and a 12-bit ADC. It provides compass heading accuracy up to 1° to 2°. Signal conditioning like amplification, automatic degaussing strap drivers and offset cancellation are inbuilt. This Crowtail module also includes a XC6206P332MR for power supply requirement. Hence user can connect any 3.3V to 6V DC power supply.
- -Crowtail compatible interface
- -3-Axis Magneto-resistive type sensors
- -I²C serial interface
- -1° to 2° Degree heading accuracy
- -Up to 116 Hz Maximum output rate
- -Built-In self test
- -Low cost compassing
- -Magnetometry
- -Pedestrian navigation
- -Hobby auto navigation
- -Compassing support for mobile devices and portable computers
DL2501Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Compass
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2501Mk05p
DL2501Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - HMC5883L - Mk08
25-08
DL2501Mk05p.ino
DL2501Mk05
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Compass
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Compass HMC5883L
#include <HMC5883L.h>
// Compass HMC5883L
HMC5883L compass;
// Heading
float heading;
// Heading Degrees
float headingDegrees;
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
String sver = "25-08";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Compass HMC5883L
isHMC5883L();
// Accelemeter ADXL345 Compass HMC5883L Display
isDisplayADXL345HMC5883L();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
// Output
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCompassHMC5883L.ino
// HMC5883L Triple Axis Digital Compass
// Setup HMC5883L
void isSetupHMC5883L(){
// Initialize Initialize HMC5883L
compass.begin();
// Set measurement range
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
compass.setDataRate(HMC5883L_DATARATE_30HZ);
// Set number of samples averaged
compass.setSamples(HMC5883L_SAMPLES_8);
// Set calibration offset
compass.setOffset(0, 0);
}
// Compass HMC5883L
void isHMC5883L(){
// Vector norm
Vector norm = compass.readNormalize();
// Calculate heading
heading = atan2(norm.YAxis, norm.XAxis);
// Set declination angle on your location and fix heading
// You can find your declination on: http://magnetic-declination.com/
// (+) Positive or (-) for negative
// Latitude: 32° 39' 7.9" N
// Longitude: 115° 28' 6.2" W
// Magnetic Declination: +10° 35'
// Declination is POSITIVE (EAST)
// Inclination: 58° 4'
// Magnetic field strength: 45759.1 nT
// Formula: (deg + (min / 60.0)) / (180 / M_PI);
float declinationAngle = (10.0 + (35.0 / 60.0)) / (180 / M_PI);
heading += declinationAngle;
// Correct for heading < 0deg and heading > 360deg
if (heading < 0)
{
heading += 2 * PI;
}
if (heading > 2 * PI)
{
heading -= 2 * PI;
}
// Convert to degrees
headingDegrees = heading * 180/M_PI;
// Output
// FullString
// ************
FullString = "************\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Heading
FullString = "Heading = " + String( heading ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// FullString
// Degress
FullString = "Degress = " + String( headingDegrees ) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Accelemeter ADXL345
screen.setCursor(0, 60);
screen.println("Compass HMC5883L");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
}
// Accelemeter ADXL345
void isDisplayADXL345HMC5883L(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(40, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(40, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(40, 120);
screen.println( z );
// Compass HMC5883L
screen.setCursor(0, 150);
screen.println( "Compass HMC5883L" );
// Heading
screen.setCursor(0, 180);
screen.println( "Heading = " );
screen.setCursor(130, 180);
screen.println( heading );
// Degress
screen.setCursor(0, 210);
screen.println( "Degress = " );
screen.setCursor(130, 210);
screen.println( headingDegrees );
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk05");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// Setup HMC5883L
isSetupHMC5883L();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #25 – Movement – ADXL345 – Mk07
——
#DonLucElectronics #DonLuc #ADXL345 #Accelerometer #Movement #ESP32 #Bluetooth #Elecrow #DFRobot #Arduino #Project #Patreon #Electronics #Microcontrollers #IoT #Fritzing #Programming #Consultant
——
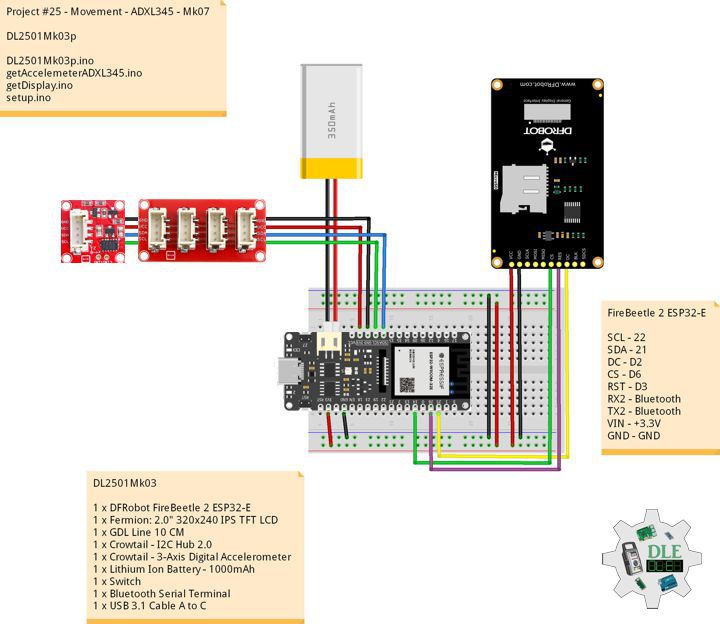
——
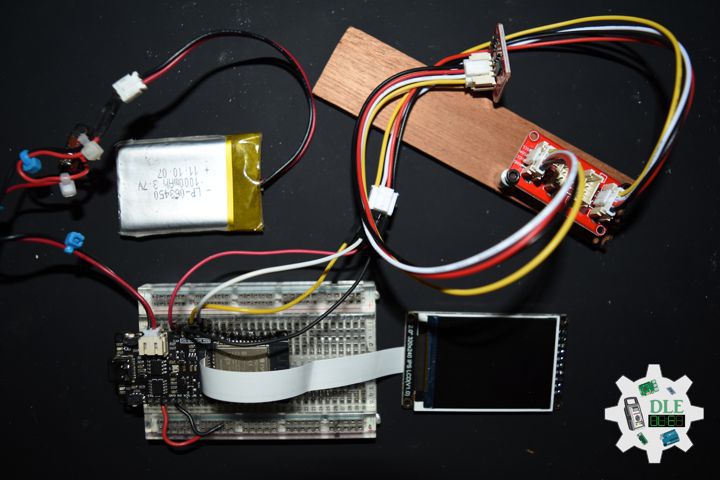
——
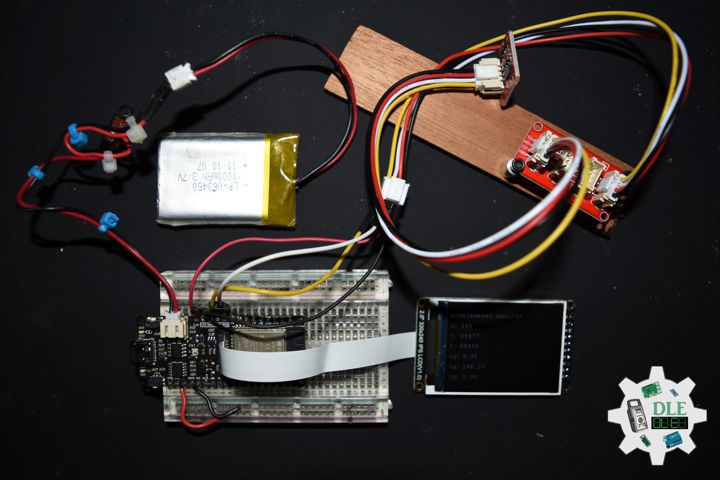
——
Crowtail – 3-Axis Digital Accelerometer
Crowtail – 3-Axis Digital Accelerometer with specific Crowtail interface, It’s base on an advanced 3-axis IC ADXL345. This is a high resolution digital accelerometer providing you at max 3.9mg/LSB resolution and large ±16g measurement range. Have no worry to implement it into your free-fall detection project, cause it’s robust enough to survive up to 10,000g shock. Meanwhile, it’s agile enough to detect single and double taps. It’s ideal for motion detection, gesture detection as well as robotics. This digital 3-axis accelerometer has excellent EMI protection.
Its variable output makes it suitable for a wide range of applications:
- 1. HDD shock protection
- 2. Vibration sensor
- 3. Game controller input
- 4. Robotics
- 5. Smart vehicles
- 6. Anywhere you need to obtain motion-sensing and orientation information.
- 7. The excellent sensitivity provide high-precision output up to ±16g.
DL2501Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail – I2C Hub 2.0
1 x Crowtail – 3-Axis Digital Accelerometer
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-E
SCL – 22
SDA – 21
DC – D2
CS – D6
RST – D3
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
DL2501Mk03p
DL2501Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #25 - Movement - ADXL345 - Mk07
25-07
DL2501Mk03p.ino
DL2501Mk03
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x Crowtail - I2C Hub 2.0
1 x Crowtail - 3-Axis Digital Accelerometer
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x Bluetooth Serial Terminal
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Accelemeter ADXL345
#include <ADXL345.h>
// Variable ADXL345 library
ADXL345 adxl;
// Accelerometer ADXL345
// x, y, z
int x;
int y;
int z;
// Standard Gravity
// xyz
double xyz[3];
double ax;
double ay;
double az;
// FullString
String FullString = "";
// Bluetooth Serial
BluetoothSerial SerialBT;
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
String sver = "25-07";
void loop() {
// Accelemeter ADXL345
isADXL345();
// Delay 0.5 Second
delay( 500 );
}
getAccelemeterADXL345.ino
// Accelemeter ADXL345
// Setup Accelemeter ADXL345
void isSetupADXL345(){
// Power On
adxl.powerOn();
// Set activity inactivity thresholds (0-255)
// 62.5mg per increment
adxl.setActivityThreshold(75);
// 62.5mg per increment
adxl.setInactivityThreshold(75);
// How many seconds of no activity is inactive?
adxl.setTimeInactivity(10);
//look of activity movement on this axes - 1 == on; 0 == off
adxl.setActivityX(1);
adxl.setActivityY(1);
adxl.setActivityZ(1);
//look of inactivity movement on this axes - 1 == on; 0 == off
adxl.setInactivityX(1);
adxl.setInactivityY(1);
adxl.setInactivityZ(1);
// Look of tap movement on this axes - 1 == on; 0 == off
adxl.setTapDetectionOnX(0);
adxl.setTapDetectionOnY(0);
adxl.setTapDetectionOnZ(1);
// Set values for what is a tap, and what is a double tap (0-255)
// 62.5mg per increment
adxl.setTapThreshold(50);
// 625us per increment
adxl.setTapDuration(15);
// 1.25ms per increment
adxl.setDoubleTapLatency(80);
// 1.25ms per increment
adxl.setDoubleTapWindow(200);
// set values for what is considered freefall (0-255)
// (5 - 9) recommended - 62.5mg per increment
adxl.setFreeFallThreshold(7);
// (20 - 70) recommended - 5ms per increment
adxl.setFreeFallDuration(45);
// Setting all interrupts to take place on int pin 1
// I had issues with int pin 2, was unable to reset it
adxl.setInterruptMapping( ADXL345_INT_SINGLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_DOUBLE_TAP_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_FREE_FALL_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_ACTIVITY_BIT, ADXL345_INT1_PIN );
adxl.setInterruptMapping( ADXL345_INT_INACTIVITY_BIT, ADXL345_INT1_PIN );
// Register interrupt actions - 1 == on; 0 == off
adxl.setInterrupt( ADXL345_INT_SINGLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_DOUBLE_TAP_BIT, 1);
adxl.setInterrupt( ADXL345_INT_FREE_FALL_BIT, 1);
adxl.setInterrupt( ADXL345_INT_ACTIVITY_BIT, 1);
adxl.setInterrupt( ADXL345_INT_INACTIVITY_BIT, 1);
}
// Accelemeter ADXL345
void isADXL345(){
// Read the accelerometer values and store them in variables x,y,z
adxl.readXYZ(&x, &y, &z);
// Output x,y,z values
Serial.print("Values of X , Y , Z: ");
Serial.print(x);
Serial.print(" , ");
Serial.print(y);
Serial.print(" , ");
Serial.println(z);
// FullString
FullString = "Values of X , Y , Z: " + String(x) + " , " +
String(y) + " , " + String(z) + + "\r\n";
// Accelemeter ADXL345
isDisplayADXL345();
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// Standard Gravity
// Acceleration
adxl.getAcceleration(xyz);
ax = xyz[0];
ay = xyz[1];
az = xyz[2];
Serial.print("X=");
Serial.print(ax);
Serial.println(" g");
Serial.print("Y=");
Serial.print(ay);
Serial.println(" g");
Serial.print("Z=");
Serial.println(az);
Serial.println(" g");
Serial.println("**********************");
// FullString
// xg
FullString = "X = " + String(ax) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// yg
FullString = "y = " + String(ay) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
// zg
FullString = "z = " + String(az) + " g" + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Accelemeter ADXL345
screen.setCursor(0, 60);
screen.println("Accelemeter ADXL345");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
}
// Accelemeter ADXL345
void isDisplayADXL345(){
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Accelemeter ADXL345
screen.setCursor(0, 30);
screen.println("Accelemeter ADXL345");
// Accelemeter ADXL345 X
screen.setCursor(0, 60);
screen.println("X: ");
screen.setCursor(30, 60);
screen.println( x );
// Accelemeter ADXL345 Y
screen.setCursor(0, 90);
screen.println( "Y: " );
screen.setCursor(30, 90);
screen.println( y );
// Accelemeter ADXL345 Z
screen.setCursor(0, 120);
screen.println( "Z: " );
screen.setCursor(30, 120);
screen.println( z );
// Standard Gravity
// Accelemeter ADXL345 Xg
screen.setCursor(0, 150);
screen.println( "Xg: " );
screen.setCursor(40, 150);
screen.println( ax );
// Accelemeter ADXL345 Yg
screen.setCursor(0, 180);
screen.println( "Yg: " );
screen.setCursor(40, 180);
screen.println( ay );
// Accelemeter ADXL345 Zg
screen.setCursor(0, 210);
screen.println( "Zg: " );
screen.setCursor(40, 210);
screen.println( az );
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("DL2501Mk03");
Serial.println("Bluetooth Started! Ready to pair...");
// Delay
delay(100);
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// Setup Accelemeter ADXL345
isSetupADXL345();
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Electronics, IoT, Teacher, Instructor, R&D and Consultant
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2025
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #25 – Movement – Quaternion – Mk06
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #Movement #MPU9150 #9DOF #Quaternion #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
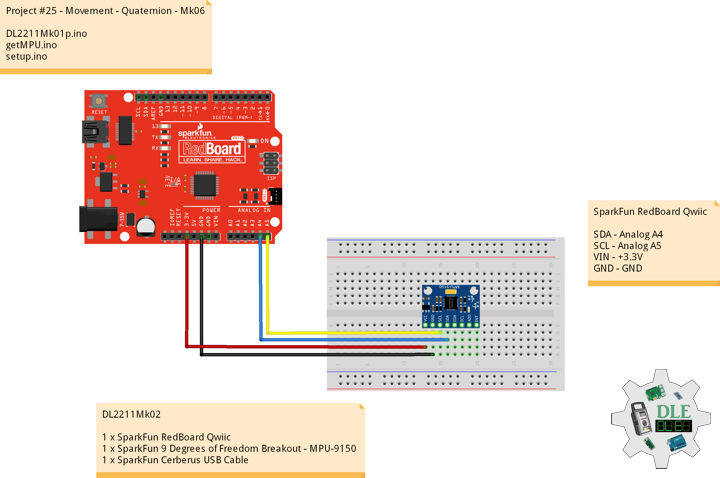
——
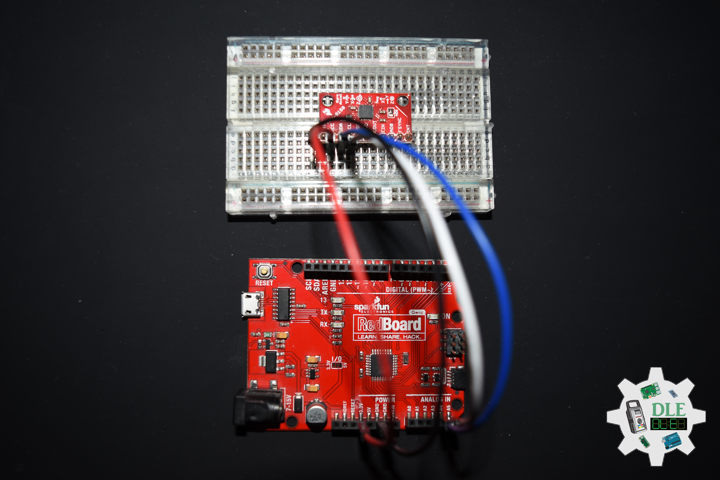
——
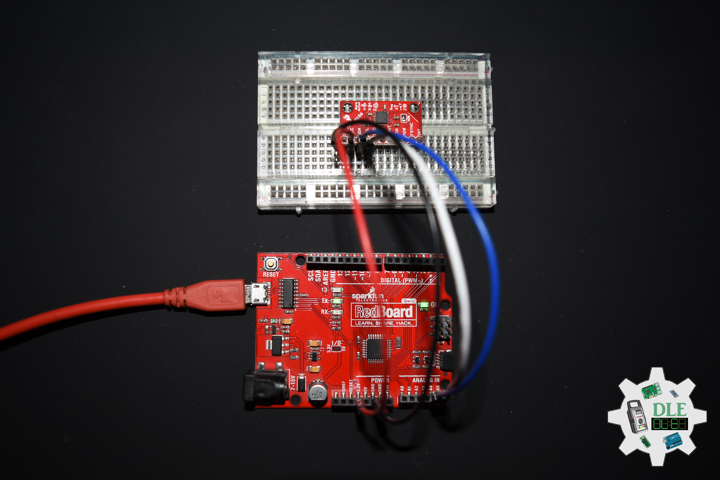
——
Quaternion
In mathematics, the quaternion number system extends the complex numbers. Quaternions were first described by the Irish mathematician William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space. Hamilton defined a quaternion as the quotient of two directed lines in a three-dimensional space, as the quotient of two vectors. Multiplication of quaternions is noncommutative.
Quaternions are used in pure mathematics, but also have practical uses in applied mathematics, particularly for calculations involving three-dimensional rotations, such as in three-dimensional computer graphics, computer vision, and crystallographic texture analysis. They can be used alongside other methods of rotation, such as Euler angles and rotation matrices, or as an alternative to them, depending on the application.
SparkFun 9 Degrees of Freedom Breakout – MPU-9150
The SparkFun 9DOF MPU-9150 is the world’s first 9-axis MotionTracking MEMS device designed for the low power, low cost, and high performance requirements of consumer electronics equipment including smartphones, tablets and wearable sensors. And guess what? You get to play with it.
This breakout board makes it easy to prototype with the InvenSense MPU-9150 by breaking out all the pins you need to standard 0.1″ spaced headers. The board also provides I2C pullup resistors and a solder jumper to switch the I2C address of the device.
The MPU-9150 is a System in Package (SiP) that combines two chips: the MPU-6050, which contains a 3-axis gyroscope, 3-axis accelerometer, and an onboard Digital Motion Processor™ (DMP™) capable of processing complex MotionFusion algorithms; and the AK8975, a 3-axis digital compass. The part’s integrated 6-axis MotionFusion algorithms access all internal sensors to gather a full set of sensor data.
DL2211Mk02
1 x SparkFun RedBoard Qwiic
1 x SparkFun 9 Degrees of Freedom Breakout – MPU-9150
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #25 - Movement - Quaternion - Mk06
25-06
DL2211Mk02p.ino
1 x SparkFun RedBoard Qwiic
1 1 x SparkFun 9 Degrees of Freedom Breakout - MPU-9150
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// I2CDev I2C utilities
#include "I2Cdev.h"
// MPU9150Lib 9-axis fusion
#include "MPU9150Lib.h"
// CalLib magnetometer and accelerometer calibration
#include "CalLib.h"
// Motion Driver InvenSense Embedded SDK v5.1
#include <dmpKey.h>
#include <dmpmap.h>
#include <inv_mpu.h>
#include <inv_mpu_dmp_motion_driver.h>
// EEPROM Magnetometer and Accelerometer data is stored
#include <EEPROM.h>
// the MPU object
MPU9150Lib MPU;
// MPU_UPDATE_RATE defines the rate (in Hz)
// at which the MPU updates the sensor data and DMP output
#define MPU_UPDATE_RATE (20)
// MAG_UPDATE_RATE defines the rate (in Hz) at which the
// MPU updates the magnetometer data
// MAG_UPDATE_RATE should be less than or equal to the MPU_UPDATE_RATE
#define MAG_UPDATE_RATE (10)
// MPU_MAG_MIX defines the influence that the magnetometer has on the yaw output.
// The magnetometer itself is quite noisy so some mixing with the gyro yaw can help
// significantly. Some example values are defined below:
// Just use gyro yaw
#define MPU_MAG_MIX_GYRO_ONLY 0
// Just use magnetometer and no gyro yaw
#define MPU_MAG_MIX_MAG_ONLY 1
// A good mix value
#define MPU_MAG_MIX_GYRO_AND_MAG 10
// mainly gyros with a bit of mag correction
#define MPU_MAG_MIX_GYRO_AND_SOME_MAG 50
// MPU_LPF_RATE is the low pas filter rate and can be between 5 and 188Hz
#define MPU_LPF_RATE 5
// This is our earth frame gravity vector - quaternions and vectors
MPUQuaternion gravity;
// SERIAL_PORT_SPEED defines the speed to use for the debug serial port
#define SERIAL_PORT_SPEED 115200
// Software Version Information
String sver = "25-06";
void loop() {
// MPU
isMPU();
}
getMPU.ino
// MPU
// Setup MPU
void isSetupMPU() {
// MPU
MPU.init(MPU_UPDATE_RATE, MPU_MAG_MIX_GYRO_AND_MAG, MAG_UPDATE_RATE, MPU_LPF_RATE); // start the MPU
// Set up the initial gravity vector for quaternion rotation
// Max value down the z axis
gravity[QUAT_W] = 0;
gravity[QUAT_X] = 0;
gravity[QUAT_Y] = 0;
gravity[QUAT_Z] = SENSOR_RANGE;
}
// MPU
void isMPU() {
// Quaternion
// This is our body frame gravity vector
MPUQuaternion rotatedGravity;
// This is the conjugate of the fused quaternion
MPUQuaternion fusedConjugate;
// Used in the rotation
MPUQuaternion qTemp;
// The accelerations
MPUVector3 result;
// Get the latest data
if (MPU.read()) {
// Need this for the rotation
MPUQuaternionConjugate(MPU.m_fusedQuaternion, fusedConjugate);
// Rotate the gravity vector into the body frame
MPUQuaternionMultiply(gravity, MPU.m_fusedQuaternion, qTemp);
MPUQuaternionMultiply(fusedConjugate, qTemp, rotatedGravity);
// Now subtract rotated gravity from the body accels to get real accelerations.
// Note that signs are reversed to get +ve acceleration results
// in the conventional axes.
result[VEC3_X] = -(MPU.m_calAccel[VEC3_X] - rotatedGravity[QUAT_X]);
result[VEC3_Y] = -(MPU.m_calAccel[VEC3_Y] - rotatedGravity[QUAT_Y]);
result[VEC3_Z] = -(MPU.m_calAccel[VEC3_Z] - rotatedGravity[QUAT_Z]);
// print the residual accelerations
MPU.printVector(result);
Serial.println();
}
}
setup.ino
// Setup
void setup() {
// Serial
Serial.begin(SERIAL_PORT_SPEED);
Serial.println("Accel9150 starting");
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup MPU
isSetupMPU();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #25 – Movement – IMU – Mk05
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #Movement #Magnetometer #Accelerometer #Gyroscope #9DOF #Barometer #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
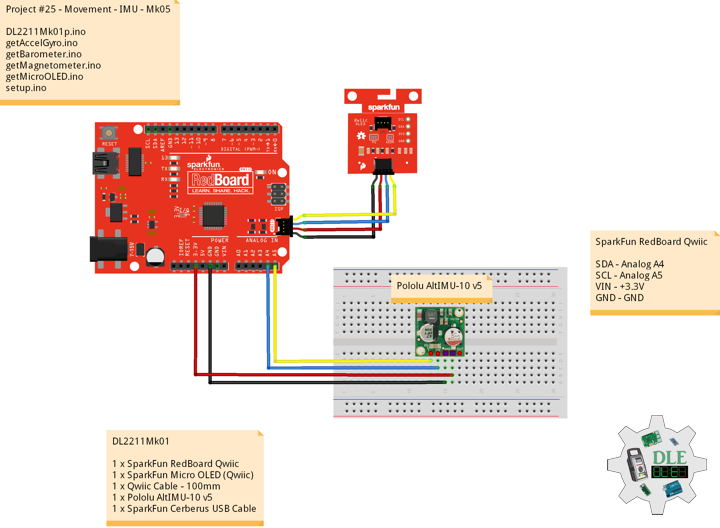
——
——
——
Inertial Measurement Unit
An inertial measurement unit (IMU) is an electronic device that measures and reports a body’s specific force, angular rate, and sometimes the orientation of the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers. When the magnetometer is included, IMUs are referred to as IMMUs. IMUs are typically used to maneuver modern vehicles including motorcycles, missiles, aircraft, including unmanned aerial vehicles, among many others, and spacecraft, including satellites and landers. Recent developments allow for the production of IMU-enabled GPS devices. An IMU allows a GPS receiver to work when GPS-signals are unavailable, such as in tunnels, inside buildings, or when electronic interference is present.
AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter (LSM6DS33, LIS3MDL, and LPS25H Carrier)
The Pololu AltIMU-10 v5 is an inertial measurement unit (IMU) and altimeter that features the same LSM6DS33 gyro and accelerometer and LIS3MDL magnetometer as the MinIMU-9 v5, and adds an LPS25H digital barometer. An I²C interface accesses ten independent pressure, rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s altitude and absolute orientation. The board operates from 2.5 to 5.5 V and has a 0.1″ pin spacing.
DL2211Mk01
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable – 100mm
1 x Pololu AltIMU-10 v5
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk01p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #25 - Movement - IMU - Mk05
25-05
DL2211Mk01p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable - 100mm
1 x Pololu AltIMU-10 v5
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital barometer
#include <LPS.h>
// 9DoF IMU
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "25-05";
void loop() {
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Micro OLED
isMicroOLED();
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display Accelerometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Accelerometer
oled.print("Acceler");
oled.setCursor(0, 12);
// X
oled.print("X: ");
oled.print(imuAX);
oled.setCursor(0, 25);
// Y
oled.print("Y: ");
oled.print(imuAY);
oled.setCursor(0, 39);
// Z
oled.print("Z: ");
oled.print(imuAZ);
oled.display();
// Delay
delay(3000);
// Text Display Gyroscopes
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Gyroscopes
oled.print("Gyro");
oled.setCursor(0, 12);
// X
oled.print("X: ");
oled.print(imuGX);
oled.setCursor(0, 25);
// Y
oled.print("Y: ");
oled.print(imuGY);
oled.setCursor(0, 39);
// Z
oled.print("Z: ");
oled.print(imuGZ);
oled.display();
// Delay
delay(3000);
// Text Display Magnetometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Magnetometer
oled.print("Mag");
oled.setCursor(0, 12);
// X
oled.print("X: ");
oled.print(magX);
oled.setCursor(0, 25);
// Y
oled.print("Y: ");
oled.print(magY);
oled.setCursor(0, 39);
// Z
oled.print("Z: ");
oled.print(magZ);
oled.display();
// Delay
delay(3000);
// Text Display Barometer
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Barometer
oled.print("Baro");
oled.setCursor(0, 12);
// Pressure
oled.print("P: ");
oled.print(pressure);
oled.setCursor(0, 25);
// Altitude Meters
oled.print("A: ");
oled.print(altitude);
oled.setCursor(0, 39);
// Temperature Celsius
oled.print("T: ");
oled.print(temperature);
oled.display();
// Delay
delay(3000);
}
setup.ino
// Setup
void setup() {
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// Setup Barometer
isSetupBarometer();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2022
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #25 – Movement – 9-DOF – Mk04
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #Movement #9DOF #Accelerometer #Magnetometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
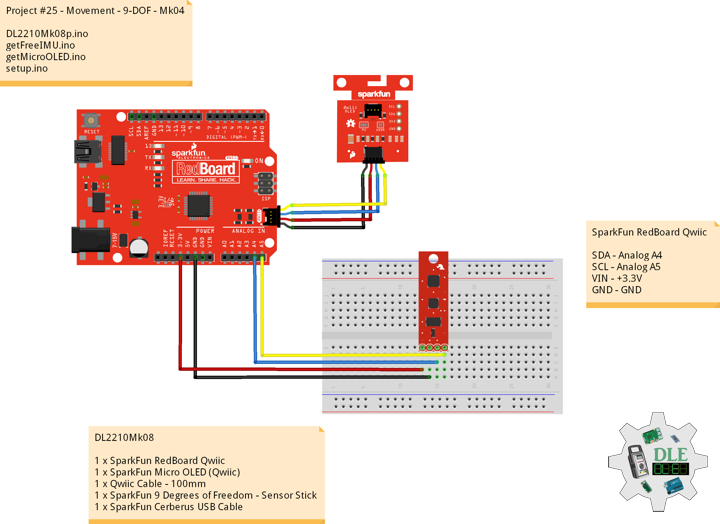
——
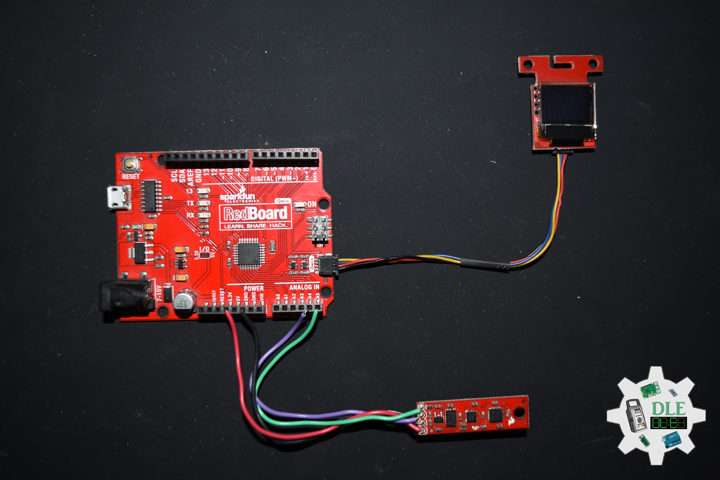
——
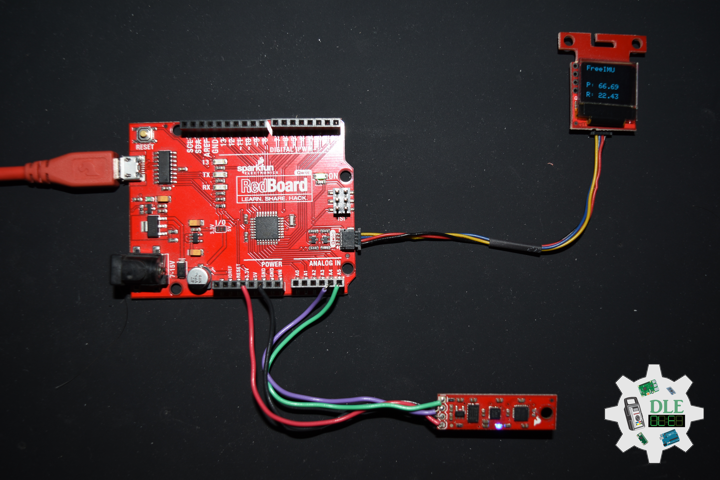
——
Roll, Pitch, and Yaw
How is Controlling an Airplane or Robotic Different than Controlling a Car or Boat?
Stability and control are much more complex for an airplane, which can move freely in three dimensions, than for cars or boats, which only move in two. A change in any one of the three types of motion affects the other two.
Imagine three lines running through an airplane and intersecting at right angles at the airplane’s center of gravity.
- Rotation around the front-to-back axis is called Roll.
- Rotation around the side-to-side axis is called Pitch.
- Rotation around the vertical axis is called Yaw.
SparkFun 9 Degrees of Freedom – Sensor Stick
The SparkFun 9DOF Sensor Stick is a very small sensor board with 9 degrees of freedom. It includes the ADXL345 accelerometer, the HMC5883L magnetometer, and the ITG-3200 MEMS gyro. The “Stick” has a simple I2C interface and a mounting hole for attaching it to your project. Also, the board is a mere allowing it to be easily mounted in just about any application.
DL2210Mk08
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable – 100mm
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2210Mk08p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #25 - Movement - 9-DOF - Mk04
25-04
DL2210Mk06p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable - 100mm
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "25-04";
void loop() {
// isFreeIMU
isFreeIMU();
// Micro OLED
isMicroOLED();
// One delay in between reads
delay(1000);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
setup.ino
// Setup
void setup() {
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2022
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #25 – Movement – Gyroscope L3G4200D – Mk03
——
#DonLucElectronics #DonLuc #SparkFunRedBoard #Movement #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
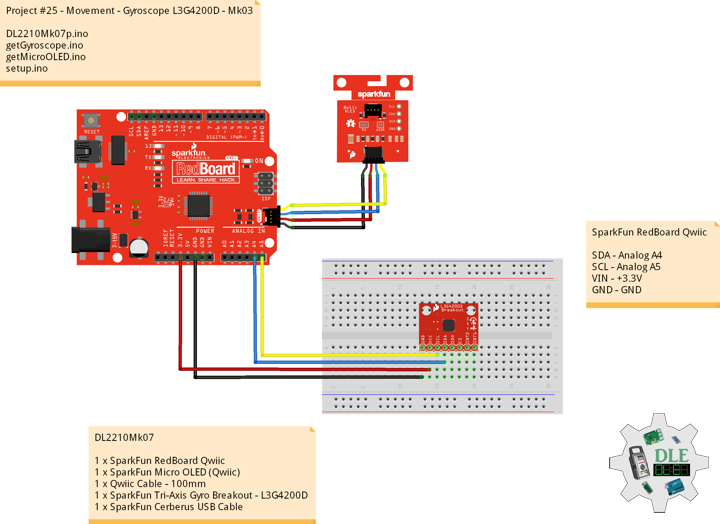
——
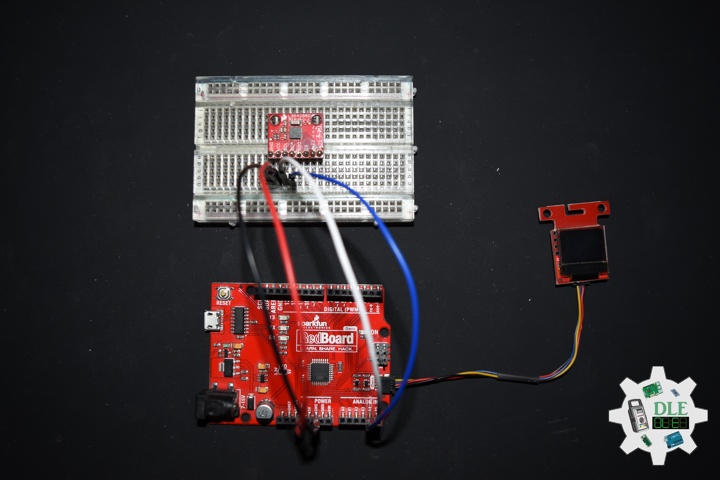
——
——
Gyroscope
A gyroscope is a device used for measuring or maintaining orientation and angular velocity.It is a spinning wheel or disc in which the axis of rotation is free to assume any orientation by itself. When rotating, the orientation of this axis is unaffected by tilting or rotation of the mounting, according to the conservation of angular momentum.
Gyroscopes based on other operating principles also exist, such as the microchip-packaged MEMS gyroscopes found in electronic devices, solid-state ring lasers, fibre optic gyroscopes, and the extremely sensitive quantum gyroscope. MEMS gyroscopes are popular in some consumer electronics, such as smartphones.
SparkFun Tri-Axis Gyro Breakout – L3G4200D
This is a breakout board for the L3G4200D low-power three-axis angular rate sensor. The L3G4200D is a MEMS motion sensor and has a full scale of ±250 or ±500 or ±2000 dps and is capable of measuring rates with a user selectable bandwidth. These work great in gaming and virtual reality input devices, GPS navigation systems and robotics.
DL2210Mk07
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable – 100mm
1 x SparkFun Tri-Axis Gyro Breakout – L3G4200D
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
DL2210Mk07p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #25 - Movement - Gyroscope L3G4200D - Mk03
25-02
DL2210Mk06p.ino
1 x SparkFun RedBoard Qwiic
1 x SparkFun Micro OLED (Qwiic)
1 x Qwiic Cable - 100mm
1 x SparkFun Tri-Axis Gyro Breakout - L3G4200D
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Gyroscope
#include <L3G4200D.h>
// Gyroscope
L3G4200D gyroscope;
// Timers
unsigned long timer = 0;
float timeStep = 0.01;
// Pitch, Roll and Yaw values
float pitch = 0;
float roll = 0;
float yaw = 0;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "25-03";
void loop() {
// Gyroscope
isGyroscope(),
// Micro OLED
isMicroOLED();
// Wait to full timeStep period
delay((timeStep*1000) - (millis() - timer));
}
getGyroscope.ino
// L3G4200D Triple Axis Gyroscope
// Setup Gyroscope
void isSetupGyroscope() {
// Setup Gyroscope
// Set scale 2000 dps and 400HZ Output data rate (cut-off 50)
while(!gyroscope.begin(L3G4200D_SCALE_2000DPS, L3G4200D_DATARATE_400HZ_50))
{
// Could not find a valid L3G4200D sensor, check wiring!
delay(500);
}
// Calibrate gyroscope. The calibration must be at rest.
// If you don't want calibrate, comment this line.
gyroscope.calibrate(100);
}
// L3G4200D Gyroscope
void isGyroscope(){
// Timer
timer = millis();
// Read normalized values
Vector norm = gyroscope.readNormalize();
// Calculate Pitch, Roll and Yaw
pitch = pitch + norm.YAxis * timeStep;
roll = roll + norm.XAxis * timeStep;
yaw = yaw + norm.ZAxis * timeStep;
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display Gyroscope
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Gyroscope
oled.print("Gyro");
oled.setCursor(0, 12);
// X
oled.print("Pit: ");
oled.print(pitch);
oled.setCursor(0, 25);
// Y
oled.print("Rol: ");
oled.print(roll);
oled.setCursor(0, 39);
// Z
oled.print("Yaw: ");
oled.print(yaw);
oled.display();
}
setup.ino
// Setup
void setup() {
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// L3G4200D Gyroscope
isSetupGyroscope();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2022
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc