Projects
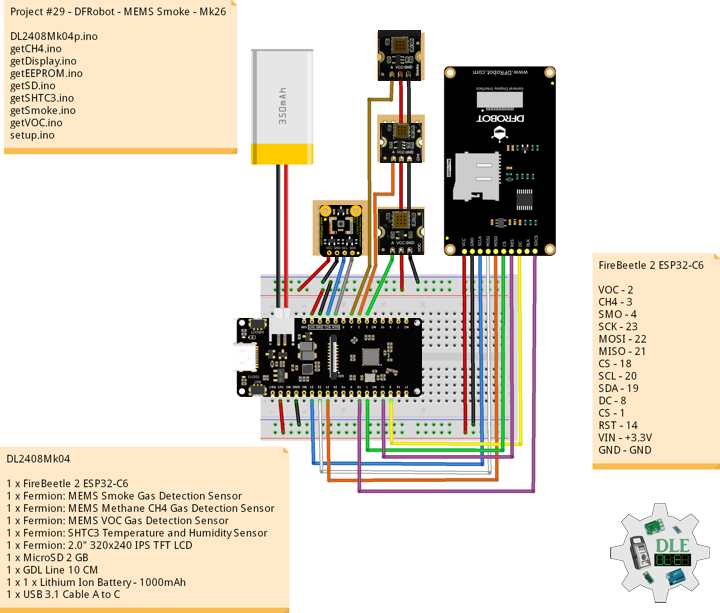
Project #29 – DFRobot – MEMS Smoke – Mk26
——
#DonLucElectronics #DonLuc #DFRobot #Smoke #CH4 #VOC #SHTC3 #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
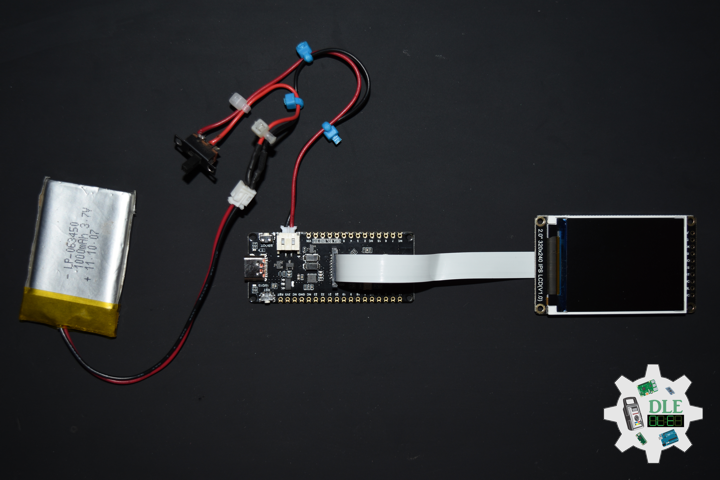
Fermion: MEMS Smoke Gas Detection Sensor
Fermion: MEMS Smoke Gas Detection Sensor employs state-of-the-art microelectromechanical system (MEMS) technology, endowing the sensor with compact dimensions, low power consumption, minimal heat generation, short preheating time, and swift response recovery. The sensor can measure smoke concentration qualitatively and is suitable for smoke alarm and other application scenarios. Kindly remove the protective film before usage. It is advisable to preheat the module for at least 24 hours. Detection range: 10-1000 ppm.
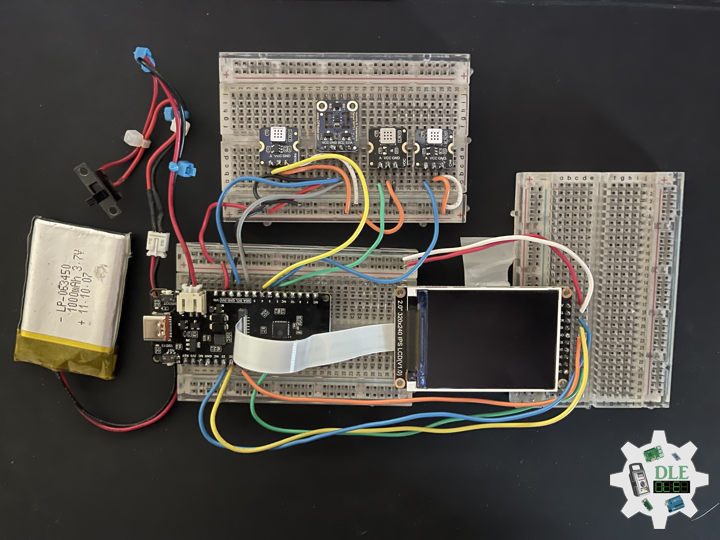
DL2408Mk04
1 x FireBeetle 2 ESP32-C6
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: MEMS Methane CH4 Gas Detection Sensor
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
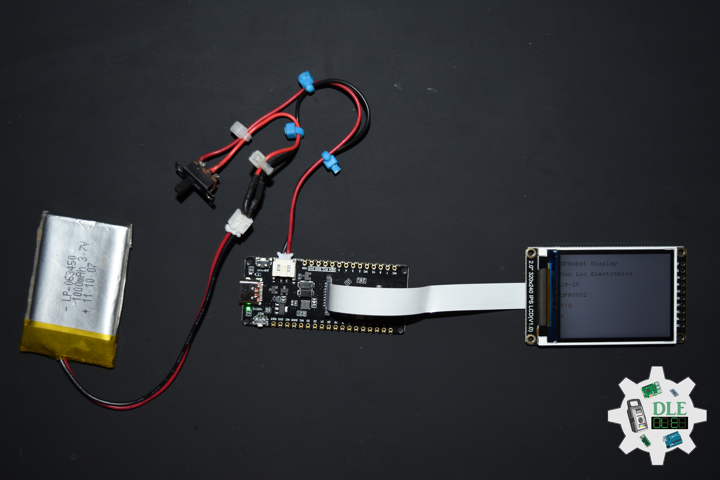
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
VOC – 2
CH4 – 3
SMO – 4
SCK – 23
MOSI – 22
MISO – 21
CS – 18
SCL – 20
SDA – 19
DC – 8
CS – 1
RST – 14
VIN – +3.3V
GND – GND
——
DL2408Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - MEMS Smoke - Mk26
29-26
DL2408Mk04p.ino
DL2408Mk04
1 x FireBeetle 2 ESP32-C6
1 x Fermion: MEMS Smoke Gas Detection Sensor
1 x Fermion: MEMS Methane CH4 Gas Detection Sensor
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// SHTC3 Temperature and Humidity Sensor
#include "SHTSensor.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// MEMS Smoke Gas
int iSensorSmoke = 4;
int iSensorValueSmoke = 0;
int z = 0;
// MEMS CH4 Gas
int iSensorCH4 = 3;
int iSensorValueCH4 = 0;
int y = 0;
// MEMS VOC Gas
int iSensorVOC = 2;
int iSensorValueVOC = 0;
int x = 0;
// MicroSD Card
const int chipSelect = 18;
String zzzzzz = "";
// SHTC3 Temperature and Humidity Sensor
SHTSensor sht;
// Temperature
float T;
// Humidity
float H;
// Defined ESP32
#define TFT_DC 8
#define TFT_CS 1
#define TFT_RST 14
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-26";
void loop() {
// MEMS Smoke Gas
isSmoke();
// MEMS CH4 Gas
isCH4();
// MEMS VOC Gas
isVOC();
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
// DFRobot Display 240x320 - Temperature and Humidity, VOC, CH4, Smoke
isDisplayTH();
// MicroSD Card
isSD();
// Delay 5 Second
delay( 5000 );
}
getCH4.ino
// MEMS CH4 Gas
// is CH4
void isCH4(){
// MEMS CH4 Gas
y = analogRead( iSensorCH4 );
iSensorValueCH4 = map(y, 1, 4095, 1, 10000);
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
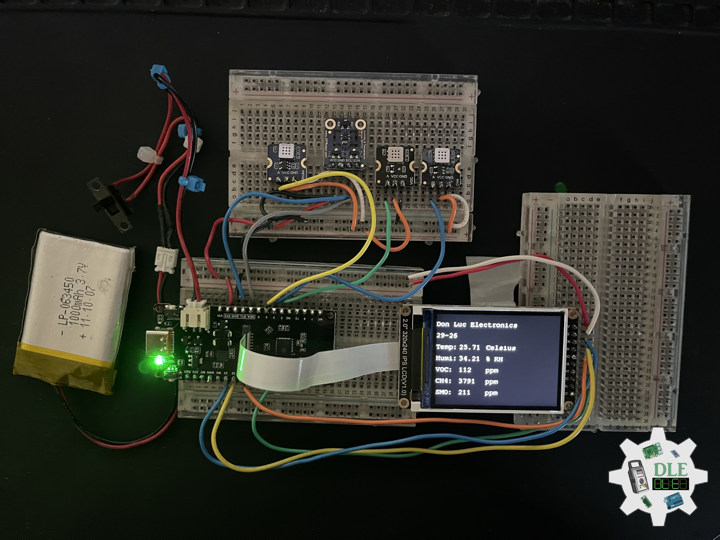
// DFRobot Display 240x320 - Temperature and Humidity, VOC, CH4, Smoke
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 60);
screen.println( sver );
// Temperature
screen.setCursor(0, 90);
screen.println( "Temp: " );
screen.setCursor(60, 90);
screen.println( T );
screen.setCursor(130, 90);
screen.println("Celsius");
// Humidity
screen.setCursor(0, 120);
screen.println("Humi: ");
screen.setCursor(60, 120);
screen.println( H );
screen.setCursor(130, 120);
screen.println("% RH");
// MEMS VOC Gas
screen.setCursor(0, 150);
screen.println( "VOC: " );
screen.setCursor(60, 150);
screen.println( iSensorValueVOC );
screen.setCursor(130, 150);
screen.println("ppm");
// MEMS CH4 Gas
screen.setCursor(0, 180);
screen.println( "CH4: " );
screen.setCursor(60, 180);
screen.println( iSensorValueCH4 );
screen.setCursor(130, 180);
screen.println("ppm");
// MEMS Smoke Gas
screen.setCursor(0, 210);
screen.println( "SMO: " );
screen.setCursor(60, 210);
screen.println( iSensorValueSmoke );
screen.setCursor(130, 210);
screen.println("ppm");
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Temperature C|% RH|VOC|CH4|Smoke|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String( T ) + "|" + String( H ) + "|"
+ String( iSensorValueVOC ) + "|" + String( iSensorValueCH4 ) + "|"
+ String( iSensorValueSmoke ) + "|*\r";;
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
if (sht.readSample()) {
// Temperature
T = sht.getTemperature();
// Humidity
H = sht.getHumidity();
}
}
getSmoke.ino
// Smoke
// isSmoke
void isSmoke(){
// MEMS Smoke Gas
z = analogRead( iSensorSmoke );
iSensorValueSmoke = map(x, 1, 4095, 1, 1000);
}
getVOC.ino
// MEMS VOC Gas
// is VOC
void isVOC(){
// MEMS VOC Gas
x = analogRead( iSensorVOC );
iSensorValueVOC = map(x, 1, 4095, 1, 500);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// SHTC3 Temperature and Humidity Sensor
sht.init();
// SHT3x
sht.setAccuracy(SHTSensor::SHT_ACCURACY_MEDIUM);
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// MicroSD Card
isSetupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot Luc.Paquin: https://edu.dfrobot.com/dashboard/makelogs
Hackster.io: https://www.hackster.io/neosteam-labs
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
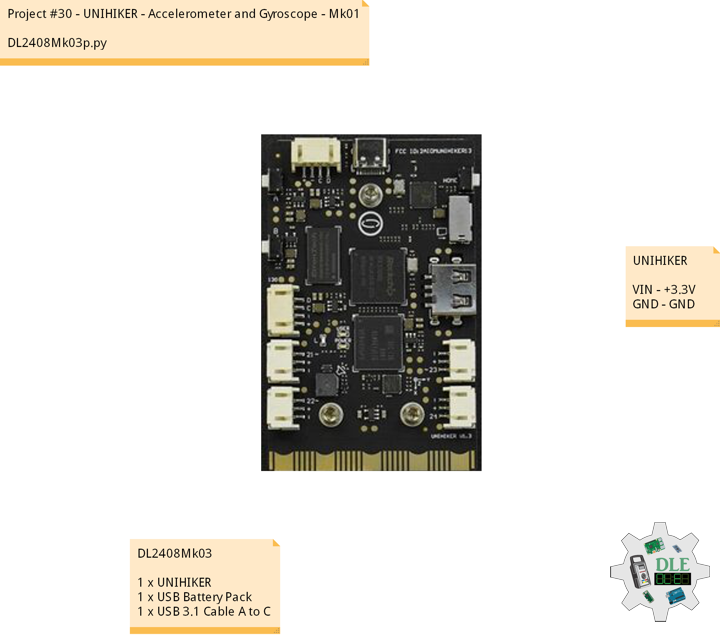
Project #30 – UNIHIKER – Accelerometer and Gyroscope – Mk01
——
#DonLucElectronics #DonLuc #UNIHIKER #Display #IoT #Project #Debian #Thonny #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
UNIHIKER Accelerometer and Gyroscope
The UNIHIKER’s back panel is equipped with a 6-axis accelerometer-gyroscope sensor, capable of reading the X, Y, and Z values of acceleration individually, as well as the total strength in X, Y, and Z directions, and the X, Y, and Z values of the gyroscope.
DL2408Mk03
1 x UNIHIKER
1 x USB Battery Pack
1 x USB 3.1 Cable A to C
DL2408Mk03p
DL2408Mk03p.py
"""
****** Don Luc Electronics © ******
Software Version Information
Project #30 - UNIHIKER - Accelerometer and Gyroscope - Mk01
30-01
DL2408Mk03p.py
DL2408Mk03
1 x UNIHIKER
1 x USB Battery Pack
1 x USB 3.1 Cable A to C
-*- coding: utf-8 -*-
"""
# Import the unihiker library
from unihiker import GUI
# Import the time library
import time
# Import the Board module from the pinpong.board package
from pinpong.board import Board
# Import all modules from the pinpong.extension.unihiker package
from pinpong.extension.unihiker import *
# Initialize the board by selecting the board type and port number;
# if not specified, the program will automatically detect it
Board().begin()
# Instantiate the GUI class and create a gui object
gui = GUI()
# Display the initial background image 'dlemk02'
img = gui.draw_image(x=0, y=0, w=240, h=320, image='dlemk02.png')
# Accelerometer
# Display the initial Accelerometer X valueAX
valueAX = gui.draw_text(x=60, y=145, text='0', font_size=10)
# Display the initial Accelerometer Y valueAY
valueAY = gui.draw_text(x=60, y=170, text='0', font_size=10)
# Display the initial Accelerometer Z valueAZ
valueAZ = gui.draw_text(x=60, y=195, text='0', font_size=10)
# Gyroscope
# Display the initial Gyroscope X valueGX
valueGX = gui.draw_text(x=60, y=240, text='0', font_size=10)
# Display the initial Gyroscope Y valueGY
valueGY = gui.draw_text(x=60, y=260, text='0', font_size=10)
# Display the initial Gyroscope Z valueGZ
valueGZ = gui.draw_text(x=60, y=285, text='0', font_size=10)
while True:
# Accelerometer
# Display the Accelerometer X
AX = accelerometer.get_x()
# Update the displayed Accelerometer X valueAX
valueAX.config(text=AX)
# Display the Accelerometer Y
AY = accelerometer.get_y()
# Update the displayed Accelerometer Y valueAY
valueAY.config(text=AY)
# Display the Accelerometer Z
AZ = accelerometer.get_z()
# Update the displayed Accelerometer Z valueAZ
valueAZ.config(text=AZ)
# Gyroscope
# Display the Gyroscope X
GX = gyroscope.get_x()
# Update the displayed Gyroscope X valueAX
valueGX.config(text=GX)
# Display the Gyroscope Y
GY = gyroscope.get_y()
# Update the displayed Gyroscope Y valueAY
valueGY.config(text=GY)
# Display the Gyroscope Z
GZ = gyroscope.get_z()
# Update the displayed Gyroscope Z valueAZ
valueGZ.config(text=GZ)
# Delay for 1 second to keep the screen content displayed for a longer time
time.sleep(1)
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot Luc.Paquin: https://edu.dfrobot.com/dashboard/makelogs
Hackster.io: https://www.hackster.io/neosteam-labs
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
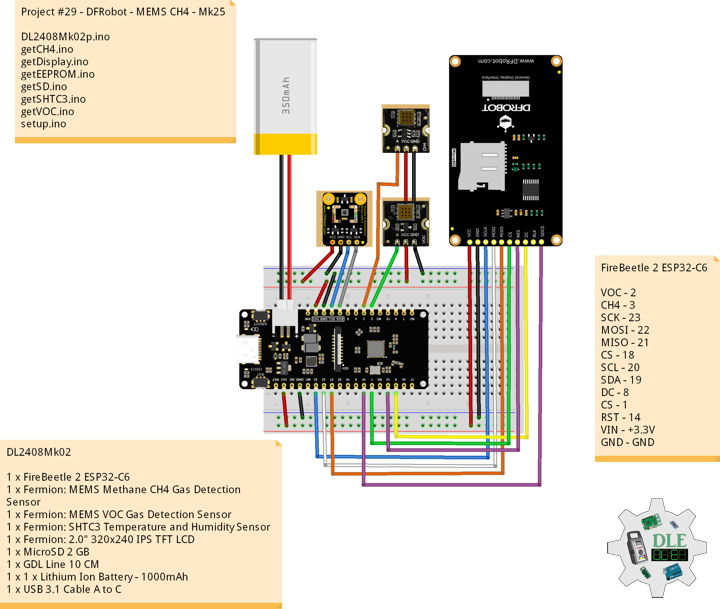
Project #29 – DFRobot – MEMS CH4 – Mk25
——
#DonLucElectronics #DonLuc #DFRobot #CH4 #VOC #SHTC3 #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Fermion: MEMS Methane CH4 Gas Detection Sensor
Fermion: MEMS Methane CH4 Gas Detection Sensor employs state-of-the-art micro-electromechanical system (MEMS) technology, endowing the sensor with compact dimensions, low power consumption, minimal heat generation, short preheating time, and swift response recovery. The sensor can qualitatively measure methane gas concentration and is suitable for combustible gas leakage monitoring devices, gas leak detectors, fire/safety detection systems and other applications. Detection range: 1-10000 ppm. It is advisable to preheat the module for at least 24 hours.
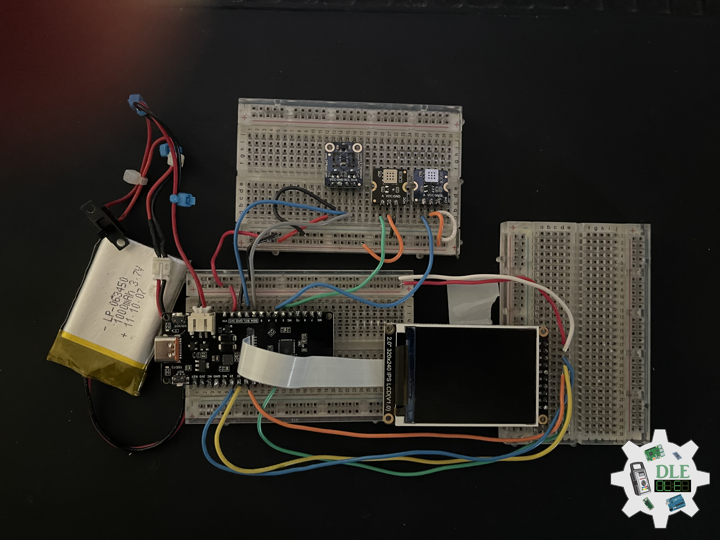
DL2408Mk02
1 x FireBeetle 2 ESP32-C6
1 x Fermion: MEMS Methane CH4 Gas Detection Sensor
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
VOC – 2
CH4 – 3
SCK – 23
MOSI – 22
MISO – 21
CS – 18
SCL – 20
SDA – 19
DC – 8
CS – 1
RST – 14
VIN – +3.3V
GND – GND
——
DL2408Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - MEMS CH4 - Mk25
29-25
DL2408Mk02p.ino
DL2408Mk02
1 x FireBeetle 2 ESP32-C6
1 x Fermion: MEMS Methane CH4 Gas Detection Sensor
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// SHTC3 Temperature and Humidity Sensor
#include "SHTSensor.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// MEMS CH4 Gas
int iSensorCH4 = 3;
int iSensorValueCH4 = 0;
int y = 0;
// MEMS VOC Gas
int iSensorVOC = 2;
int iSensorValueVOC = 0;
int x = 0;
// MicroSD Card
const int chipSelect = 18;
String zzzzzz = "";
// SHTC3 Temperature and Humidity Sensor
SHTSensor sht;
// Temperature
float T;
// Humidity
float H;
// Defined ESP32
#define TFT_DC 8
#define TFT_CS 1
#define TFT_RST 14
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-25";
void loop() {
// MEMS CH4 Gas
isCH4();
// MEMS VOC Gas
isVOC();
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
// DFRobot Display 240x320 - Temperature and Humidity, VOC, CH4
isDisplayTH();
// MicroSD Card
isSD();
// Delay 5 Second
delay( 5000 );
}
getCH4.ino
// MEMS CH4 Gas
// is CH4
void isCH4(){
// MEMS CH4 Gas
y = analogRead( iSensorCH4 );
iSensorValueCH4 = map(y, 1, 4095, 1, 10000);
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// DFRobot Display 240x320 - Temperature and Humidity, VOC, CH4
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 60);
screen.println( sver );
// Temperature
screen.setCursor(0, 90);
screen.println( "Temp: " );
screen.setCursor(60, 90);
screen.println( T );
screen.setCursor(130, 90);
screen.println("Celsius");
// Humidity
screen.setCursor(0, 120);
screen.println("Humi: ");
screen.setCursor(60, 120);
screen.println( H );
screen.setCursor(130, 120);
screen.println("% RH");
// MEMS VOC Gas
screen.setCursor(0, 150);
screen.println( "VOC: " );
screen.setCursor(60, 150);
screen.println( iSensorValueVOC );
screen.setCursor(130, 150);
screen.println("ppm");
// MEMS CH4 Gas
screen.setCursor(0, 180);
screen.println( "CH4: " );
screen.setCursor(60, 180);
screen.println( iSensorValueCH4 );
screen.setCursor(130, 180);
screen.println("ppm");
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Temperature C|% RH|VOC|CH4|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String( T ) + "|" + String( H ) + "|"
+ String( iSensorValueVOC ) + "|" + String( iSensorValueCH4 ) + "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
if (sht.readSample()) {
// Temperature
T = sht.getTemperature();
// Humidity
H = sht.getHumidity();
}
}
getVOC.ino
// MEMS VOC Gas
// is VOC
void isVOC(){
// MEMS VOC Gas
x = analogRead( iSensorVOC );
iSensorValueVOC = map(x, 1, 4095, 1, 500);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// SHTC3 Temperature and Humidity Sensor
sht.init();
// SHT3x
sht.setAccuracy(SHTSensor::SHT_ACCURACY_MEDIUM);
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// MicroSD Card
isSetupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
DFRobot Luc.Paquin: https://edu.dfrobot.com/dashboard/makelogs
Hackster.io: https://www.hackster.io/neosteam-labs
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #29 – DFRobot – UNIHIKER – Mk24
——
#DonLucElectronics #DonLuc #DFRobot #UNIHIKER #Display #IoT #Project #Programming #Electronics #Microcontrollers #Consultant
——

——
——

——
UNIHIKER
UNIHIKER is a single-board computer that brings you brand new experience. It features a 2.8-inch touchscreen, Wi-Fi and Bluetooth. It is equipped with light sensor, accelerometer, gyroscope and microphone. With built-in co-processor, it is able to communicate with various analog/digital/I2C/UART/SPI sensors and acuators.
UNIHIKER brings a whole new experience for developers with its pre-installed software, allowing for an incredibly fast and easy start. Featuring a built-in developers can program the single board computer using a smartphone or tablet. Of course, just like other single board computers, UNIHIKER supports Mu Editor, Jupyter Notebook, VS Code, VIM, and Thonny. The integrated PinPong control library allows developers to directly control UNIHIKER’s built-in sensors and hundreds of connected sensors and actuators using Python.
The built-in SIoT service on UNIHIKER allows users to store data through the MQTT protocol and provides real-time web data access. The best part is that all data is stored within the device itself. Compact, feature-rich, and user-friendly, UNIHIKER offers an innovative development experience for learning, coding, and creating. Unleash your imagination and embark on a new journey with UNIHIKER.
DL2408Mk01
1 x UNIHIKER
1 x USB 3.1 Cable A to C
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
Project #29 – DFRobot – MEMS VOC – Mk23
——
#DonLucElectronics #DonLuc #DFRobot #VOC #SHTC3 #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
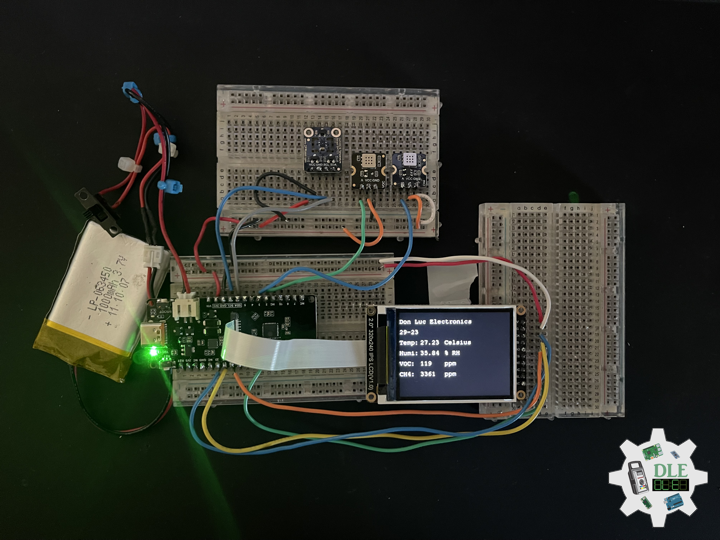
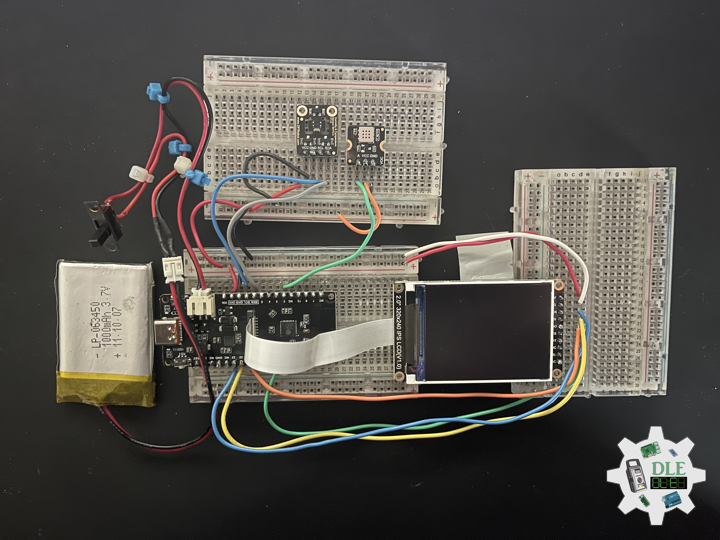
Fermion: MEMS Volatile Organic Compounds VOC Gas Detection Sensor
Fermion: MEMS Volatile Organic Compounds VOC Gas Sensor employs state-of-the-art microelectromechanical system (MEMS) technology, endowing the sensor with compact dimensions, low power consumption, minimal heat generation, short preheating time, and swift response recovery. The sensor can qualitatively measure VOC gas concentration and is suitable for indoor air quality detection, fresh air system, air purifier and other application scenarios. Kindly remove the protective film before usage. Gas detected: ethanol, formaldehyde, toluene, etc. Detection range: 1-500 ppm. It is advisable to preheat the module for at least 24 hours.
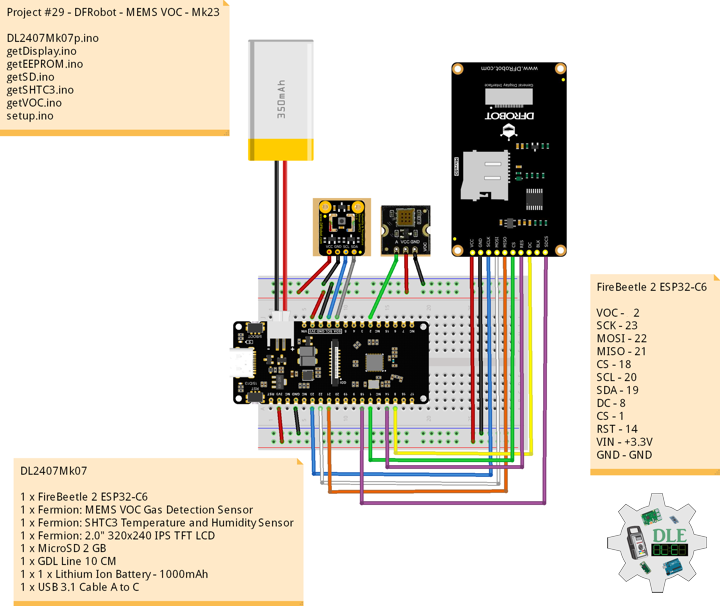
DL2407Mk07
1 x FireBeetle 2 ESP32-C6
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
VOC – 2
SCK – 23
MOSI – 22
MISO – 21
CS – 18
SCL – 20
SDA – 19
DC – 8
CS – 1
RST – 14
VIN – +3.3V
GND – GND
——
DL2407Mk07p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - MEMS VOC - Mk23
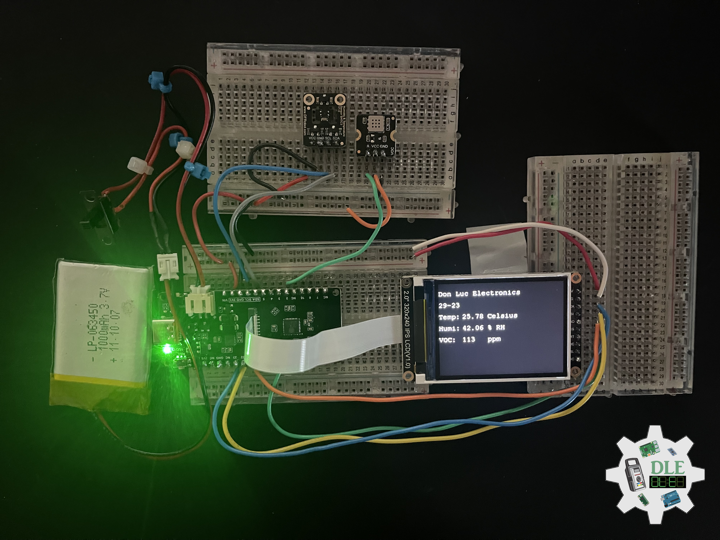
29-23
DL2407Mk07p.ino
DL2407Mk07
1 x FireBeetle 2 ESP32-C6
1 x Fermion: MEMS VOC Gas Detection Sensor
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// SHTC3 Temperature and Humidity Sensor
#include "SHTSensor.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// MEMS VOC Gas
int iSensorVOC = 2;
int iSensorValueVOC = 0;
int x = 0;
// MicroSD Card
const int chipSelect = 18;
String zzzzzz = "";
// SHTC3 Temperature and Humidity Sensor
SHTSensor sht;
// Temperature
float T;
// Humidity
float H;
// Defined ESP32
#define TFT_DC 8
#define TFT_CS 1
#define TFT_RST 14
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-23";
void loop() {
// MEMS VOC Gas
isVOC();
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
// DFRobot Display 240x320 - Temperature and Humidity
isDisplayTH();
// MicroSD Card
isSD();
// Delay 5 Second
delay( 5000 );
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// DFRobot Display 240x320 - Temperature and Humidity
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 60);
screen.println( sver );
// Temperature
screen.setCursor(0, 90);
screen.println( "Temp: " );
screen.setCursor(60, 90);
screen.println( T );
screen.setCursor(125, 90);
screen.println("Celsius");
// Humidity
screen.setCursor(0, 120);
screen.println("Humi: ");
screen.setCursor(60, 120);
screen.println( H );
screen.setCursor(125, 120);
screen.println("% RH");
// MEMS VOC Gas
screen.setCursor(0, 150);
screen.println( "VOC: " );
screen.setCursor(60, 150);
screen.println( iSensorValueVOC );
screen.setCursor(125, 150);
screen.println("ppm");
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Temperature C|% RH|VOC|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String( T ) + "|" + String( H ) + "|"
+ String( iSensorValueVOC ) + "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
if (sht.readSample()) {
// Temperature
T = sht.getTemperature();
// Humidity
H = sht.getHumidity();
}
}
getVOC.ino
// MEMS VOC Gas
// is VOC
void isVOC(){
// MEMS VOC Gas
x = analogRead( iSensorVOC );
iSensorValueVOC = map(x, 1, 4095, 1, 500);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// SHTC3 Temperature and Humidity Sensor
sht.init();
// SHT3x
sht.setAccuracy(SHTSensor::SHT_ACCURACY_MEDIUM);
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// MicroSD Card
isSetupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
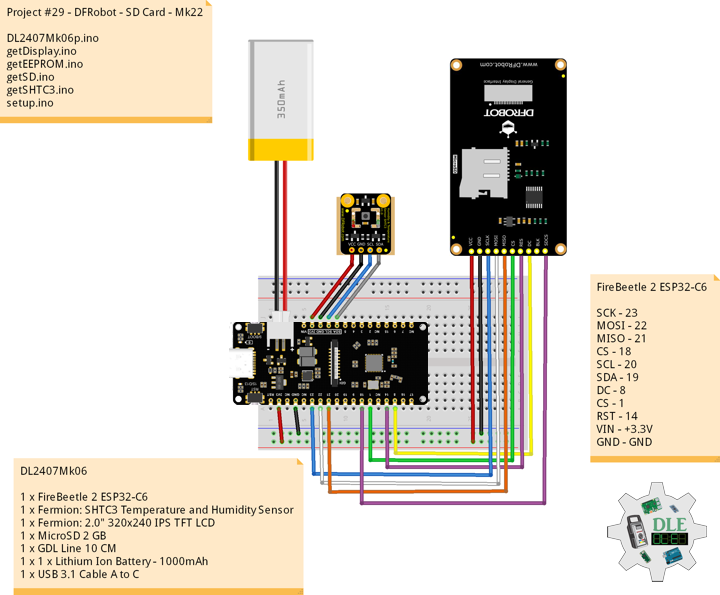
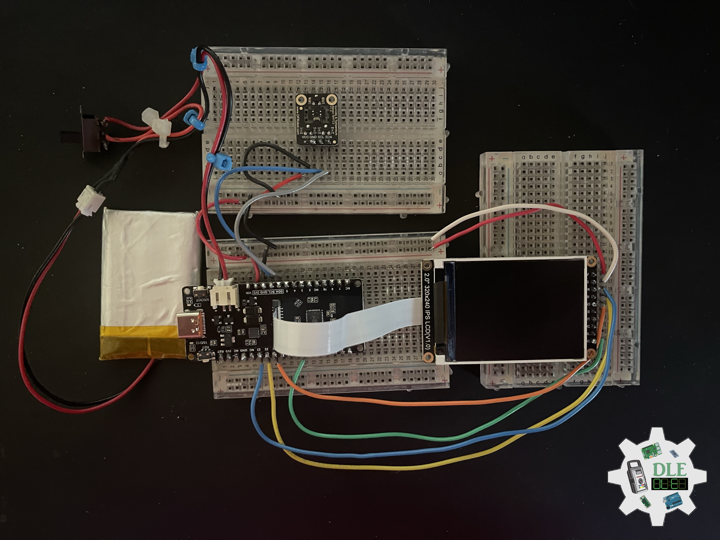
Project #29 – DFRobot – SD Card – Mk22
——
#DonLucElectronics #DonLuc #DFRobot #SHTC3 #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SD Card
Secure Digital, officially abbreviated as SD, is a proprietary, non-volatile, flash memory card format the SD Association (SDA) developed for use in portable devices. Because of their small physical dimensions, SD cards became widely used in many consumer electronic devices, such as Arduino, digital cameras, camcorders, video game consoles, mobile phones, action cameras such as the GoPro Hero series, and camera drones.
DL2407Mk06
1 x FireBeetle 2 ESP32-C6
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
SCK – 23
MOSI – 22
MISO – 21
CS – 18
SCL – 20
SDA – 19
DC – 8
CS – 1
RST – 14
VIN – +3.3V
GND – GND
——
DL2407Mk06p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - SD Card - Mk22
29-22
DL2407Mk06p.ino
DL2407Mk06
1 x FireBeetle 2 ESP32-C6
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x MicroSD 2 GB
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// SHTC3 Temperature and Humidity Sensor
#include "SHTSensor.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// MicroSD Card
const int chipSelect = 18;
String zzzzzz = "";
// SHTC3 Temperature and Humidity Sensor
SHTSensor sht;
// Temperature
float T;
// Humidity
float H;
// Defined ESP32
#define TFT_DC 8
#define TFT_CS 1
#define TFT_RST 14
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-22";
void loop() {
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
// DFRobot Display 240x320 - Temperature and Humidity
isDisplayTH();
// MicroSD Card
isSD();
// Delay 5 Second
delay( 5000 );
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// DFRobot Display 240x320 - Temperature and Humidity
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 60);
screen.println( sver );
// Temperature
// Text Color => red
screen.setTextColor(0xf800);
screen.setCursor(0, 90);
screen.println( "Temperature" );
screen.setCursor(0, 120);
screen.println( T );
screen.setCursor(100, 120);
screen.println("Celsius");
// Humidity
// Text Color => blue
screen.setTextColor(0x001f);
screen.setCursor(0, 150);
screen.println("Humidity");
screen.setCursor(0, 180);
screen.println( H );
screen.setCursor(100, 180);
screen.println("% RH");
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Temperature C|% RH|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String( T ) + "|" + String( H ) + "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
if (sht.readSample()) {
// Temperature
T = sht.getTemperature();
// Humidity
H = sht.getHumidity();
}
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// SHTC3 Temperature and Humidity Sensor
sht.init();
// SHT3x
sht.setAccuracy(SHTSensor::SHT_ACCURACY_MEDIUM);
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Delay
delay(100);
// MicroSD Card
isSetupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
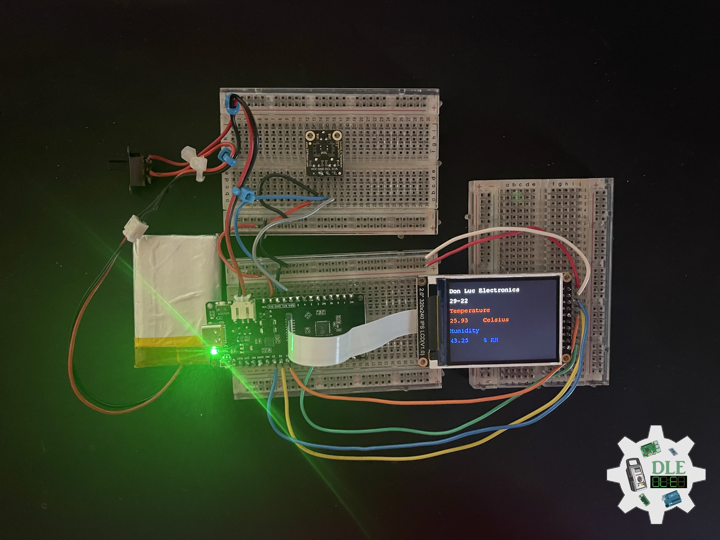
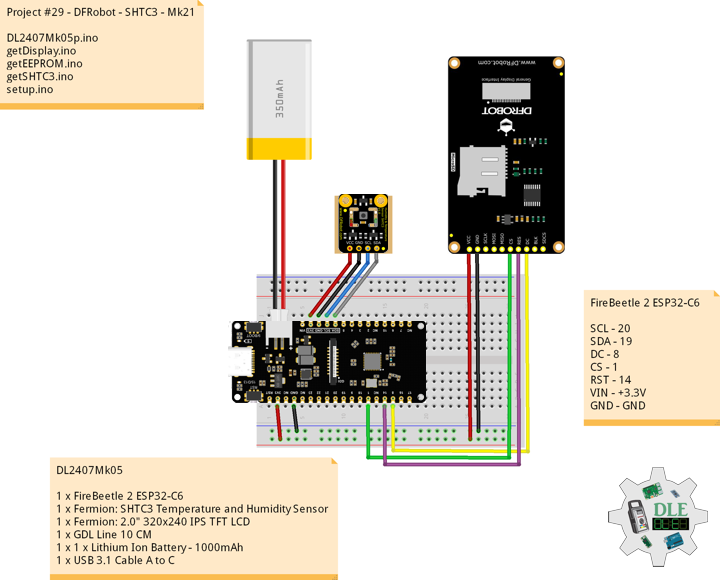
Project #29 – DFRobot – SHTC3 – Mk21
——
#DonLucElectronics #DonLuc #DFRobot #SHTC3 #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Fermion: SHTC3 Temperature and Humidity Sensor
The SHTC3 digital humidity sensor from Sensirion builds on the success of the proven SHTC1 sensor and offers consistent high accuracy within the measuring range. The sensor covers a humidity measurement range of 0 to 100% RH and a temperature detection range of -40 Celsius to 125 Celsius with a typical accuracy of ±2% RH and ±0.2 Celsius. The board supply voltage of 3.3 Volt to 5 Volt and a current consumption below 0.15mA in low power mode make the SHTC3 perfectly suitable for mobile or wireless battery-driven applications.
DL2407Mk05
1 x FireBeetle 2 ESP32-C6
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
SCL – 20
SDA – 19
DC – 8
CS – 1
RST – 14
VIN – +3.3V
GND – GND
——
DL2407Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - SHTC3 - Mk21
29-21
DL2407Mk05p.ino
DL2407Mk05
1 x FireBeetle 2 ESP32-C6
1 x Fermion: SHTC3 Temperature and Humidity Sensor
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Arduino
#include <Arduino.h>
// Wire
#include <Wire.h>
// SHTC3 Temperature and Humidity Sensor
#include "SHTSensor.h"
// SHTC3 Temperature and Humidity Sensor
SHTSensor sht;
// Temperature
float T;
// Humidity
float H;
// Defined ESP32
#define TFT_DC 8
#define TFT_CS 1
#define TFT_RST 14
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-21";
void loop() {
// SHTC3 Temperature and Humidity Sensor
isSHTC3();
// DFRobot Display 240x320 - Temperature and Humidity
isDisplayTH();
// Delay 5 Second
delay( 5000 );
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// DFRobot Display 240x320 - Temperature and Humidity
void isDisplayTH() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 60);
screen.println( sver );
// Temperature
// Text Color => red
screen.setTextColor(0xf800);
screen.setCursor(0, 90);
screen.println( "Temperature" );
screen.setCursor(0, 120);
screen.println( T );
screen.setCursor(100, 120);
screen.println("Celsius");
// Humidity
// Text Color => blue
screen.setTextColor(0x001f);
screen.setCursor(0, 150);
screen.println("Humidity");
screen.setCursor(0, 180);
screen.println( H );
screen.setCursor(100, 180);
screen.println("% RH");
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getSHTC3.ino
// SHTC3 Temperature and Humidity Sensor
// SHTC3
void isSHTC3(){
// SHTC3 Temperature and Humidity Sensor
if (sht.readSample()) {
// Temperature
T = sht.getTemperature();
// Humidity
H = sht.getHumidity();
}
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Wire
Wire.begin();
// Delay
delay( 100 );
// SHTC3 Temperature and Humidity Sensor
sht.init();
// SHT3x
sht.setAccuracy(SHTSensor::SHT_ACCURACY_MEDIUM);
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
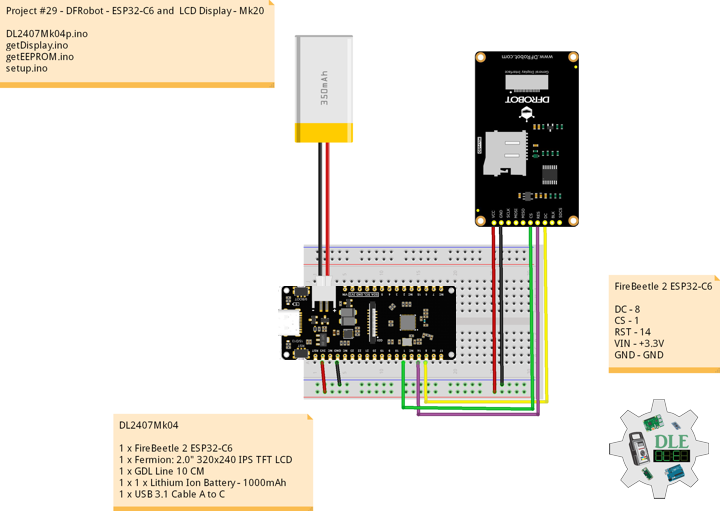
Project #29 – DFRobot – ESP32-C6 and LCD Display – Mk20
——
#DonLucElectronics #DonLuc #DFRobot #FireBeetle2ESP32C6 #Display #EEPROM #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
FireBeetle 2 ESP32-C6
The FireBeetle 2 ESP32-C6 is a versatile low-power IoT controller board designed for Smart Home Automation, control and monitoring system. It features a 160MHz RISC-V 32-bit processor, providing excellent energy efficiency and flexibility for Internet of Things (IoT) projects. The board supports multiple communication protocols, including Wi-Fi 6, Bluetooth 5, Zigbee 3.0, and Thread 1.3, enabling versatile wireless connectivity.
Fermion: 2.0″ 320×240 IPS TFT LCD
This 2.0 inches LCD display adopts ST7789V driver chip and has 320 x 240 color pixels, performing excellently in the angle of view. It supports SPI communication mode and GDI port, plug, and play. The module can be powered by 3.3 Volt ~ 5 Volt, compatible with multiple main-controllers like Arduino UNO, Leonardo, ESP32, ESP8266, FireBeetle M0, and so on. Besides, there is an onboard MicroSD card slot for displaying more pictures.
DL2407Mk04
1 x FireBeetle 2 ESP32-C6
1 x Fermion: 2.0″ 320×240 IPS TFT LCD
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery – 1000mAh
1 x USB 3.1 Cable A to C
FireBeetle 2 ESP32-C6
DC – 8
CS – 1
RST – 14
VIN – +3.3V
GND – GND
DL2407Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - ESP32-C6 and LCD Display - Mk20
29-20
DL2407Mk04p.ino
DL2407Mk04
1 x FireBeetle 2 ESP32-C6
1 x Fermion: 2.0" 320x240 IPS TFT LCD
1 x GDL Line 10 CM
1 x 1 x Lithium Ion Battery - 1000mAh
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// Defined ESP32
#define TFT_DC 8
#define TFT_CS 1
#define TFT_RST 14
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 240x320
DFRobot_ST7789_240x320_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// VID
int VID = 0;
String zzzzzz = "";
// LED Green
int iLEDGreen = 15;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-20";
void loop() {
// VID
VID = VID + 1;
// DFRobot Display 240x320 - VID
isDisplayVID();
// Delay 5 Second
delay( 5000 );
}
getDisplay.ino
// DFRobot Display 240x320
// DFRobot Display 240x320 - UID
void isDisplayUID() {
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => ghostwhite
screen.fillScreen(0xf7bf);
// Text Color => black
screen.setTextColor(0x0000);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// DFRobot Display 240x320 - VID
void isDisplayVID() {
// zzzzzz = VID
zzzzzz = String(VID);
// DFRobot Display 240x320
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => ghostwhite
screen.fillScreen(0xf7bf);
// Text Color => black
screen.setTextColor(0x0000);
// Font => Free Mono 9pt
screen.setFont(&FreeMono9pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// DFRobot Display
screen.setCursor(0, 30);
screen.println("DFRobot Display");
// Don Luc Electronics
screen.setCursor(0, 60);
screen.println("Don Luc Electronics");
// Version
screen.setCursor(0, 90);
screen.println( sver );
// EEPROM
screen.setCursor(0, 120);
screen.println( uid );
// Text Color => red
screen.setTextColor(0xf800);
// VID
screen.setCursor(0, 150);
screen.println("VID");
screen.setCursor(0, 180);
screen.println( zzzzzz );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// Delay
delay( 100 );
// DFRobot Display 240x320
screen.begin();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// DFRobot Display 240x320 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
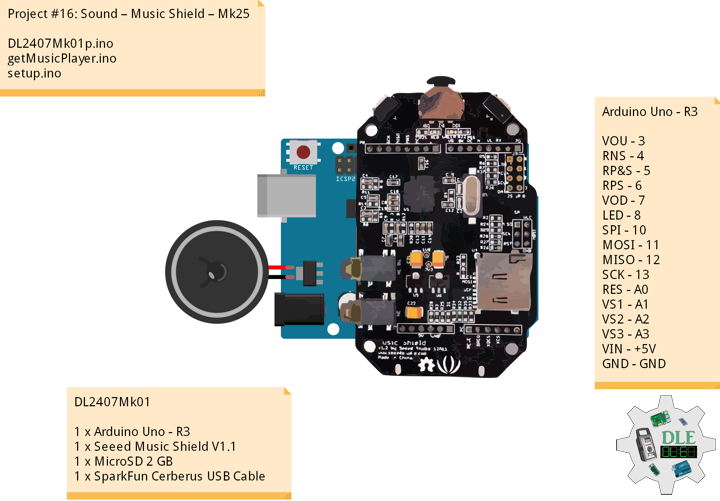
Project #16: Sound – Music Shield – Mk25
——
#DonLucElectronics #DonLuc #ArduinoUno #Seeed #MusicShield #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
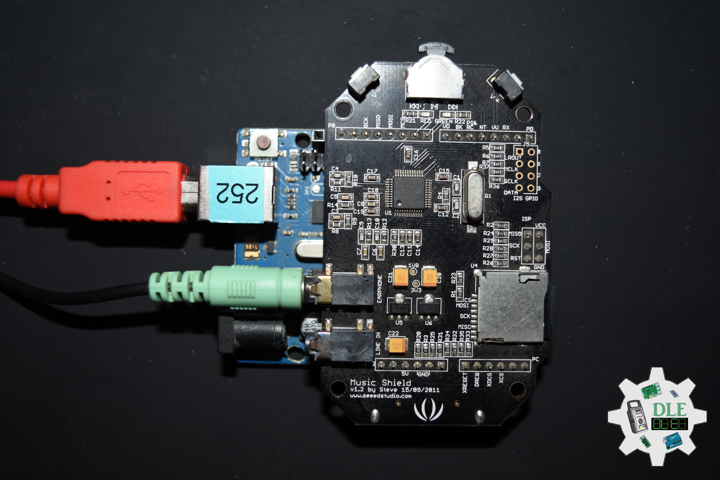
Seeed Studio: Music Shield V1.2
The Music Shield is a professional audio codec. It can work with Arduino, Seeeduino, Seeeduino Mega and Arduino Mega. It is based on VS1053b IC, and can play a variety of music formats stored on MicroSD cards with Seeed the provided Arduino Library. Recording is only supported on Seeeduino Mega and Arduino Mega for now.
- Arduino, Seeeduino, Arduino Mega, and Seeeduino Mega compatible
- 2 control-push buttons and 1 knob switch
- Plays music from micro SD cards Decodes: MP3, WAV, MIDI, Ogg Vorbis
- I2S interface for external DAC
- Headphone/Line Out for playback
- Line In for recording in OGG format
- Excellent sound quality with ±1 dB Frequency Response
- FCC verification
Insert the Micro SD card and the earphone. Plug the Music Shield onto the Arduino. Connect the board to PC using USB cable.
DL2407Mk01
1 x Arduino Uno – R3
1 x Seeed Music Shield V1.1
1 x MicroSD 2 GB
1 x Speakers
1 x SparkFun Cerberus USB Cable
Arduino Uno – R3
VOU – 3
RNS – 4
RP&S – 5
RPS – 6
VOD – 7
LED – 8
SPI – 10
MOSI – 11
MISO – 12
SCK – 13
RES – A0
VS1 – A1
VS2 – A2
VS3 – A3
VIN – +5V
GND – GND
DL2407Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #16: Sound – Music Shield – Mk25
16-25
DL2407Mk01p.ino
DL2407Mk01
1 x Arduino Uno - R3
1 x Seeed Music Shield V1.1
1 x MicroSD 2 GB
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Fat 16
#include <Fat16.h>
#include <Fat16Util.h>
// New SPI
#include <NewSPI.h>
// Arduino
#include <arduino.h>
// Seeed Music Player
#include "pins_config.h"
#include "vs10xx.h"
#include "newSDLib.h"
#include "MusicPlayer.h"
// Seeed Music Player
MusicPlayer myplayer;
// Software Version Information
String sver = "16-25";
void loop() {
// Seeed Music Player
isMusicPlayer();
}
getMusicPlayer.ino
// Seeed Music Player
// is Music Player
void isMusicPlayer() {
// Seeed Music Player
// Set mode to play shuffle
myplayer.setPlayMode(MODE_SHUFFLE);
//Otherwise it will add the current song to the new playlist.
//If the current playlist is empty,it will add all the songs
// in the root directory to the playlist.
myplayer.creatPlaylist();
// Play List
myplayer.playList();
// While
while(1);
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Seeed Music Player
// Will initialize the hardware and set default mode to be normal
myplayer.begin();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc
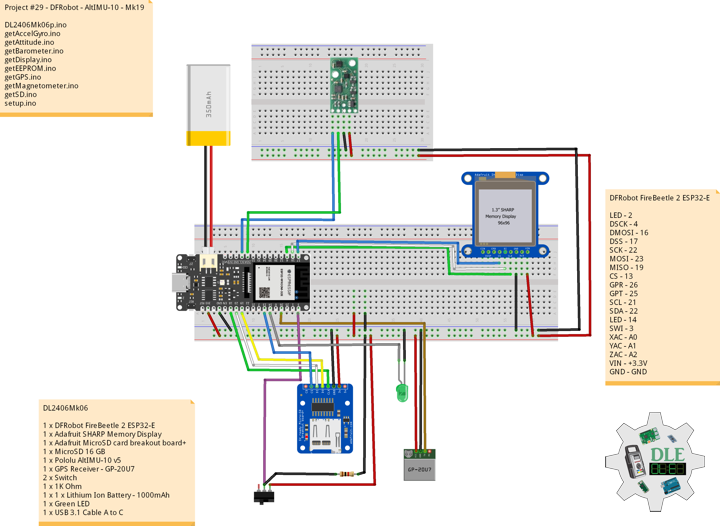
Project #29 – DFRobot – AltIMU-10 – Mk19
——
#DonLucElectronics #DonLuc #DFRobot #AltIMU10 #9DOF #GPS #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #Pololu #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Pololu AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter
The Pololu AltIMU-10 v5 is a compact board that combines ST’s LSM6DS33 3-axis gyroscope and 3-axis accelerometer, LIS3MDL 3-axis magnetometer, and LPS25H digital barometer to form an inertial measurement unit (IMU) and altimeter. These sensors are great ICs, but their small packages make them difficult for the typical student or hobbyist to use. They also operate at voltages below 3.6 Volt, which can make interfacing difficult for microcontrollers operating at 5 Volt. The AltIMU-10 v5 addresses these issues by incorporating additional electronics, including a voltage regulator and a level-shifting circuit, while keeping the overall size as compact as possible. The board ships fully populated with its SMD components, including the LSM6DS33, LIS3MDL, and LPS25H.
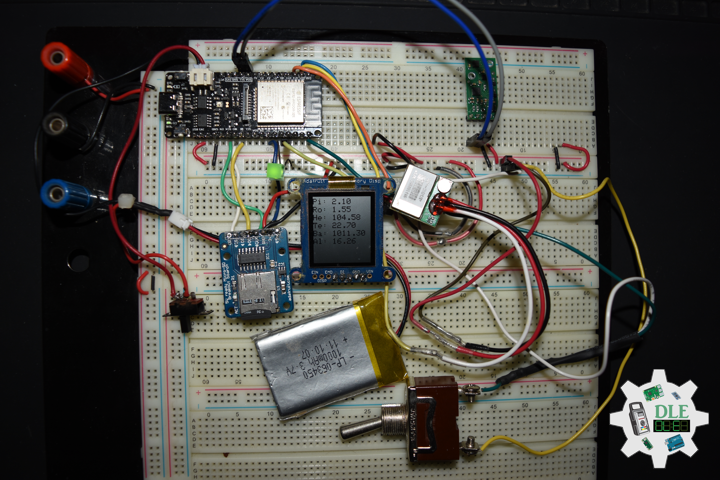
Attitude and Heading Reference System (AHRS)
An attitude and heading reference system (AHRS) uses an inertial measurement unit (IMU) consisting of microelectromechanical system (MEMS) inertial sensors to measure the angular rate, acceleration, and Earth’s magnetic field. These measurements can then be used to derive an estimate of the object’s attitude. An AHRS typically includes a 3-axis gyroscope, a 3-axis accelerometer, and a 3-axis magnetometer to determine an estimate of a system’s orientation. Each of these sensors contribute different measurements to the combined system and each exhibit unique limitations.
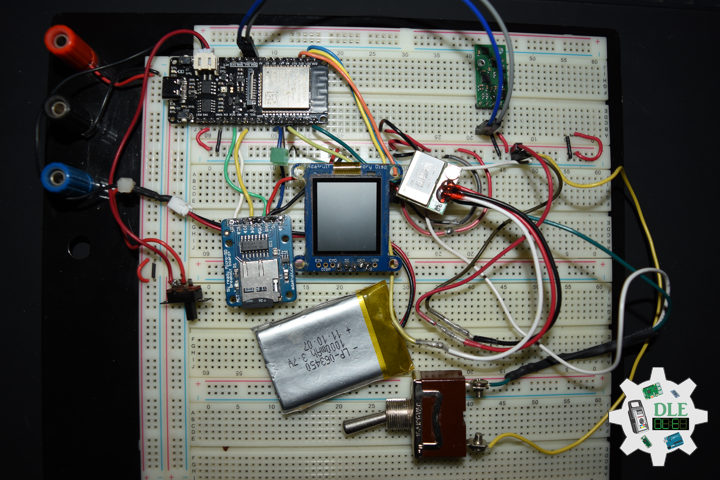
DL2406Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Pololu AltIMU-10 v5
1 x GPS Receiver – GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
GPR – 26
GPT – 25
SCL – 21
SDA – 22
LED – 14
SWI – 3
XAC – A0
YAC – A1
ZAC – A2
VIN – +3.3V
GND – GND
——
DL2406Mk06p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - AltIMU-10 - Mk19
29-19
DL2406Mk06p.ino
DL2406Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Pololu AltIMU-10 v5
1 x GPS Receiver - GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL Magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital Barometer
#include <LPS.h>
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here: http://www.ngdc.noaa.gov/geomag-web/#declination
// Declination (degrees) in Mexicali
#define DECLINATION 10.31
// 9DoF IMU
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
//String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
// Attitude Calculate Pitch, Roll, and Headind
float r;
float p;
float h;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 26
// This one is unused and doesnt have a conection
#define gpsTXPIN 25
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-19";
void loop() {
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Attitude Calculate Pitch, Roll, and Heading
isAttitude(imuAX, imuAY, imuAZ, -imuGY, -imuGX, imuGZ);
// isGPS
isGPS();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Attitude Calculate Pitch, Roll, and Heading and Barometer
isDisplayAttitude();
} else {
// Display GPS
isDisplayGPS();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 5 Second
delay(5000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void isSetupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getAttitude.ino
// Attitude Calculate Pitch, Roll, and Heading
void isAttitude(float ax, float ay, float az, float mx, float my, float mz) {
// Attitude Calculate Pitch, Roll, and Heading
float roll = atan2(ay, az);
float pitch = atan2(-ax, sqrt(ay * ay + az * az));
float heading;
if (my == 0)
heading = (mx < 0) ? PI : 0;
else
heading = atan2(mx, my);
heading -= DECLINATION * PI / 180;
if (heading > PI) heading -= (2 * PI);
else if (heading < -PI) heading += (2 * PI);
// Convert everything from radians to degrees:
heading *= 180.0 / PI;
pitch *= 180.0 / PI;
roll *= 180.0 / PI;
h = heading;
p = pitch;
r = roll;
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Attitude Calculate Pitch, Roll, and Heading
void isDisplayAttitude() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Pitch
display.setCursor(0,5);
display.print( "Pi: " );
display.println( p );
// Roll
display.setCursor(0,25);
display.print( "Ro: " );
display.println( r );
// Heading
display.setCursor(0,45);
display.print( "He: " );
display.println( h );
// Temperature Celsius
display.setCursor(0,65);
display.print( "Te: " );
display.println( temperature );
// Barometer
display.setCursor(0,85);
display.print( "Ba: " );
display.println( pressure );
// Altitude Meters
display.setCursor(0,105);
display.print( "Al: " );
display.println( altitude );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Latitude
display.setCursor(0,5);
display.print( "Lat: " );
display.println( TargetLat );
// Longitude
display.setCursor(0,30);
display.print( "Lon: " );
display.println( TargetLon );
// GPS Date
display.setCursor(0,55);
display.println( TargetDat );
// GPS Time
display.setCursor(0,80);
display.println( TargetTim );
// GPS Speed M/S
display.setCursor(0,105);
display.print( TargetSMS );
display.println( " M/S" );
// GPS Altitude Meters
display.setCursor(0,130);
display.print( TargetALT );
display.println( " M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Gyroscope X|Gyroscope Y|Gyroscope Z|
//Magnetometer X|Magnetometer Y|Magnetometer Z|
//Pitch|Roll|Heading|
//Temperature C|Pressure Millibars|Altitude Meters|
//GPS|Latitude|Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Altitude|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String(imuAX) + "|" + String(imuAY) + "|" + String(imuAZ) + "|"
+ String(imuGX) + "|" + String(imuGY) + "|" + String(imuGZ) + "|"
+ String(magX) + "|" + String(magY) + "|" + String(magZ) + "|"
+ String(p) + "|" + String(r) + "|" + String(h) + "|"
+ String(temperature) + "|" + String(pressure) + "|" + String(altitude) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|"
+ String(TargetLon) + "|" + String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetALT)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
//MicroSD Card
isSetupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// Setup IMU
isSetupIMU();
// Setup Magnetometer
isSetupMag();
// Setup Barometer
isSetupBarometer();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc