DonLuc
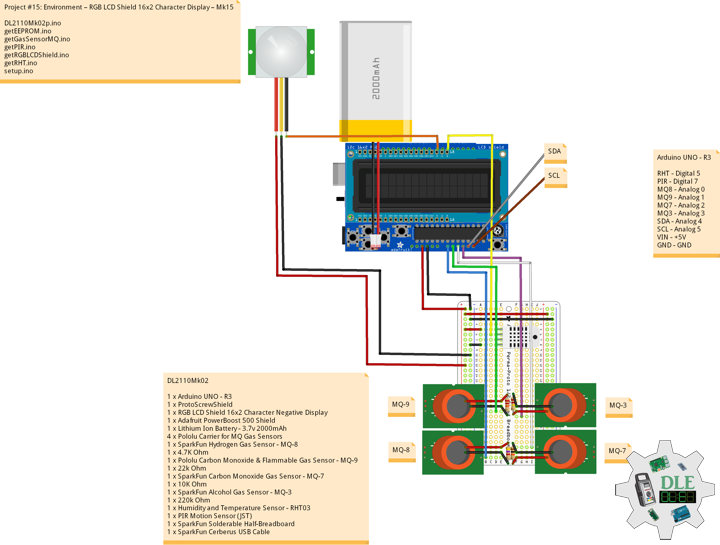
Project #15: Environment – RGB LCD Shield 16×2 Character Display – Mk15
——
#DonLucElectronics #DonLuc #Environment #MQ #PIR #RHT03 #ArduinoUNO #Arduino #AdafruitPowerBoost #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
RGB LCD Shield 16×2 Character Negative Display
With this in mind, we wanted to make it easier for people to get these LCD into their projects so we devised a shield that lets you control a 16×2 Character LCD, up to 3 backlight pins AND 5 keypad pins using only the two I2C pins on the Arduino. The shield is designed for Arduinos Uno. It uses the I2C pins at Analog 4 and Analog 5.
At this time, the library and shield can control the RGB backlight of our character LCDs by turning each LED on or off. This means you can display the following colors: Red, Yellow, Green, Teal, Blue, Violet, White and all off. This shield is perfect for when you want to build a stand-alone project with its own user interface. The 4 directional buttons plus select button allows basic control without having to attach a bulky computer.
Adjusting Contrast
The shield uses a character LCD with an external contrast potentiometer. The first time you use it, adjust the potentiometer in the bottom right until you see the text clearly.
DL2110Mk02
1 x Arduino UNO – R3
1 x ProtoScrewShield
1 x RGB LCD Shield 16×2 Character Negative Display
1 x Adafruit PowerBoost 500 Shield
1 x Lithium Ion Battery – 3.7v 2000mAh
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor- RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
Arduino UNO – R3
RHT – Digital 5
PIR – Digital 7
MQ8 – Analog 0
MQ9 – Analog 1
MQ7 – Analog 2
MQ3 – Analog 3
SDA – Analog 4
SCL – Analog 5
VIN – +5V
GND – GND
DL2110Mk02p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #15: Environment – RGB LCD Shield 16x2 Character Display – Mk15
10-02
DL2110Mk02p.ino
1 x Arduino UNO - R3
1 x ProtoScrewShield
1 x RGB LCD Shield 16x2 Character Negative Display
1 x Adafruit PowerBoost 500 Shield
1 x Lithium Ion Battery - 3.7v 2000mAh
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor - MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor - MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor - RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include <EEPROM.h>
// RHT Temperature and Humidity Sensor
#include <SparkFun_RHT03.h>
// Adafruit RGB LCD Shield 16x2
#include <Adafruit_RGBLCDShield.h>
// RHT Temperature and Humidity Sensor
// RHT03 data pin Digital 5
const int RHT03_DATA_PIN = 5;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A0;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet.
// With these two points, a line is formed which is
// "approximately equivalent" to the original curve.
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A1;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A2;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A3;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// PIR Motion
// Motion detector
const int iMotion = 7;
// Proximity
int proximity = LOW;
String Det = "";
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// Software Version Information
String uid = "";
// Version
String sver = "15-15";
void loop()
{
// Adafruit RGB LCD Shield
// Clear
RGBLCDShield.clear();
// RHT Temperature and Humidity Sensor
isRHT03();
// Gas Sensors MQ
isGasSensor();
// isPIR Motion
isPIR();
// Adafruit RGB LCD Shield
// Display
isDisplay();
// Delay
// Turn the LED on HIGH is the voltage level
digitalWrite(LED_BUILTIN, HIGH);
// Wait for a 0.5 second
delay( 500 );
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// Wait for a 0.5 second
delay( 500 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
}
}
getRGBLCDShield.ino
// Adafruit RGB LCD Shield
// Setup RGB LCD Shield
void isSetupRGBLCDShield() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
// Set the cursor to column 0, line 0
RGBLCDShield.setBacklight(RED);
// Don luc
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc");
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Electronics
RGBLCDShield.print("Electronics");
// Delay
delay(5000);
// Clear
RGBLCDShield.clear();
// Set the cursor to column 0, line 0
RGBLCDShield.setBacklight(TEAL);
// Version
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Version: " + sver);
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Unit ID
RGBLCDShield.print("Unit ID: " + uid);
// Delay
delay(5000);
// Clear
RGBLCDShield.clear();
}
// isDisplay
void isDisplay() {
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// RHT Temperature and Humidity Sensor
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
// Temperature C
RGBLCDShield.print( "Temp C: " );
RGBLCDShield.print( latestTempC );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Humidity
RGBLCDShield.print( "Humidity: " );
RGBLCDShield.print( latestHumidity );
break;
case 2:
// PIR Motion Sensor
// Set the cursor to column 0, line 0
// PIR Motion Sensor
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print( "PIR Motion" );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Det
RGBLCDShield.print( Det );
break;
case 3:
// Gas Sensors 1
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
// Hydrogen Gas Sensor - MQ-8
RGBLCDShield.print( "MQ-8: " );
RGBLCDShield.print( iMQ8ppm );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
RGBLCDShield.print( "MQ-9: " );
RGBLCDShield.print( iMQ9ppm );
break;
case 4:
// Gas Sensors 2
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
// Carbon Monoxide Gas Sensor - MQ-7
RGBLCDShield.print( "MQ-7: " );
RGBLCDShield.print( iMQ7ppm );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Alcohol Gas Sensor - MQ-3
RGBLCDShield.print( "MQ-3: " );
RGBLCDShield.print( iMQ3ppm );
break;
case 5:
// Don luc Electronics
// Set the cursor to column 0, line 0
// Don luc
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc");
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Electronics
RGBLCDShield.print("Electronics");
break;
default:
// Don luc Electronics
yy = 5;
RGBLCDShield.setBacklight(RED);
// Set the cursor to column 0, line 0
// Don luc
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc");
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// Electronics
RGBLCDShield.print("Electronics");
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// RHT Temperature and Humidity Sensor
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// PIR Motion Sensor
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Gas Sensors 1
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Gas Sensors 2
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Don luc Electronics
RGBLCDShield.setBacklight(RED);
}
}
}
getRHT.ino
// RHT Temperature and Humidity Sensor
// setup RHT Temperature and Humidity Sensor
void setupRTH03() {
// RHT Temperature and Humidity Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT Temperature and Humidity Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
}
setup.ino
// Setup
void setup()
{
// EEPROM Unique ID
isUID();
// RHT Temperature and Humidity Sensor
// Setup RTH03 Temperature and Humidity Sensor
setupRTH03();
// PIR Motion
// Setup PIR
setupPIR();
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Adafruit RGB LCD Shield
isSetupRGBLCDShield();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
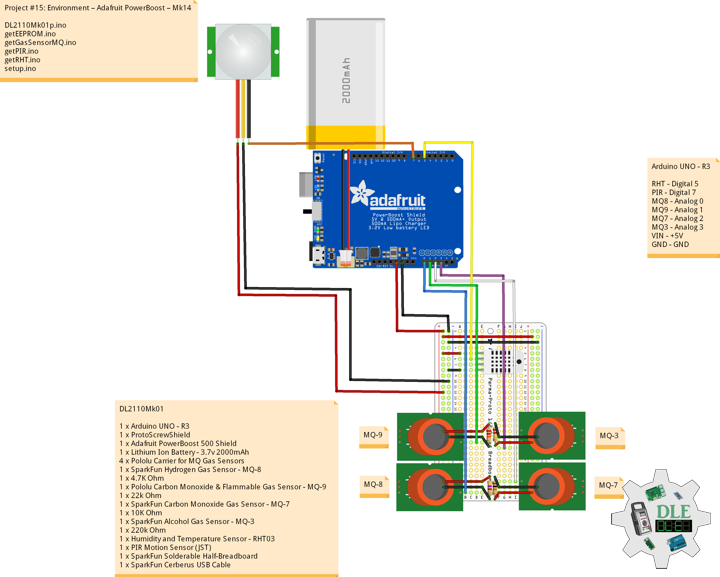
Project #15: Environment – Adafruit PowerBoost – Mk14
——
#DonLucElectronics #DonLuc #Environment #MQ #PIR #RHT03 #ArduinoUNO #Arduino #AdafruitPowerBoost #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
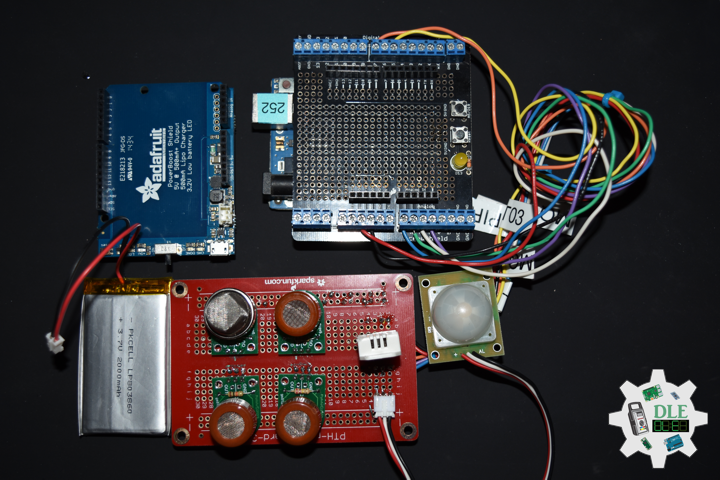
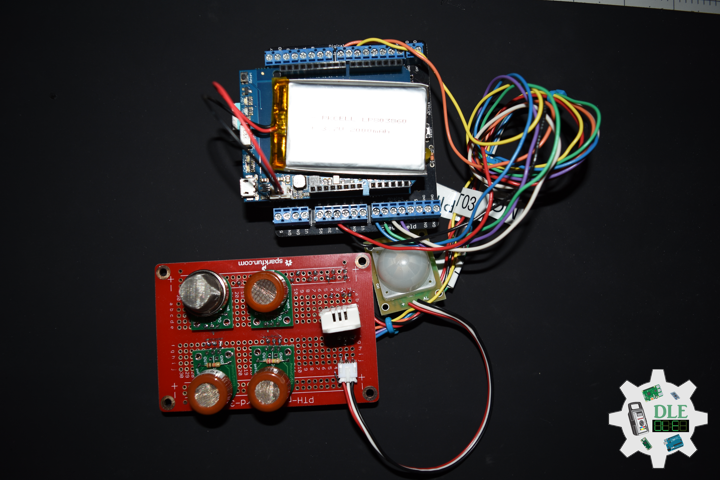
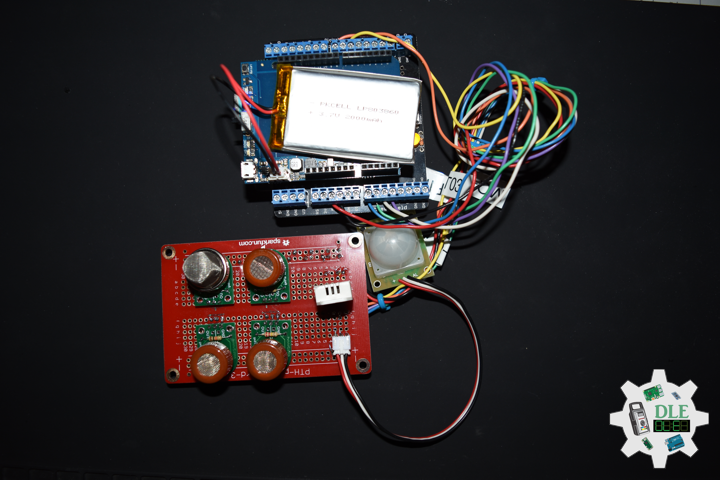
Adafruit PowerBoost 500 Shield – Rechargeable 5V Power Shield
What’s a project if it’s trapped on your desk? Now you can take your Arduino anywhere you wish with the PowerBoost shield. This stackable shield goes onto your Arduino and provides a slim rechargeable power pack, with a built in battery charger as well as DC/DC booster.
Compatible with Arduino Uno basically any Arduino-pinout-shaped Arduino as only the GND and 5V pins are used. You can stack shields on top, or stack the PowerBoost on top. The PowerBoost shield can run off of any Lithium Ion or Lithium Polymer battery but we suggest our 2000mAh capacity batteries, both of which fits very nicely in the empty space of the shield. Plug in the battery and recharge it via the microUSB jack. When you’re ready to go, just unplug the Arduino from USB or the wall adapter and it will automatically switch over to shield power. Use only Lipoly batteries with protection circuitry.
The onboard boost converter can provide at least 500mA current, and can peak at 1A. There’s an onboard fuse to protect against higher current draws which could damage the boost converter or battery. The boost converter can be damaged by high current spikes and is not recommended for driving motors or robots where the stall current can cause high current spikes. It will let you turn the shield and Arduino power on/off.
Lithium Ion Battery – 3.7v 2000mAh
Lithium ion polymer batteries are thin, light and powerful. The output ranges from 4.2V when completely charged to 3.7V. This battery has a capacity of 2000mAh. If you need a larger battery. The batteries come pre-attached with a genuine 2-pin JST-PH connector as shown and include the necessary protection circuitry. Because they have a genuine JST connector, not a knock-off, the cable wont snag or get stuck in a matching JST jack, they click in and out smoothly.
DL2110Mk01
1 x Arduino UNO – R3
1 x ProtoScrewShield
1 x Adafruit PowerBoost 500 Shield
1 x Lithium Ion Battery – 3.7v 2000mAh
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor- RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
Arduino UNO – R3
RHT – Digital 5
PIR – Digital 7
MQ8 – Analog 0
MQ9 – Analog 1
MQ7 – Analog 2
MQ3 – Analog 3
VIN – +5V
GND – GND
DL2110Mk01p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #15: Environment – Adafruit PowerBoost – Mk14
10-01
DL2110Mk01p.ino
1 x Arduino UNO - R3
1 x ProtoScrewShield
1 x Adafruit PowerBoost 500 Shield
1 x Lithium Ion Battery - 3.7v 2000mAh
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor - MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor - MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor - RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include <EEPROM.h>
// RHT Temperature and Humidity Sensor
#include <SparkFun_RHT03.h>
// RHT Temperature and Humidity Sensor
// RHT03 data pin Digital 5
const int RHT03_DATA_PIN = 5;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A0;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet.
// With these two points, a line is formed which is
// "approximately equivalent" to the original curve.
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A1;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A2;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A3;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// PIR Motion
// Motion detector
const int iMotion = 7;
// Proximity
int proximity = LOW;
String Det = "";
// Software Version Information
String uid = "";
// Version
String sver = "15-14";
void loop()
{
// RHT Temperature and Humidity Sensor
isRHT03();
// Gas Sensors MQ
isGasSensor();
// isPIR Motion
isPIR();
// Delay
// Turn the LED on HIGH is the voltage level
digitalWrite(LED_BUILTIN, HIGH);
// Wait for a 0.5 second
delay( 500 );
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// Wait for a 0.5 second
delay( 500 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
// Serial
// Hydrogen Gas Sensor - MQ-8
Serial.print( "MQ-8: " );
Serial.println( iMQ8ppm );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
Serial.print( "MQ-9: " );
Serial.println( iMQ9ppm );
// Carbon Monoxide Gas Sensor - MQ-7
Serial.print( "MQ-7: " );
Serial.println( iMQ7ppm );
// Alcohol Gas Sensor - MQ-3
Serial.print( "MQ-3: " );
Serial.println( iMQ3ppm );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
// Serial
Serial.println( Det );
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
// Serial
Serial.println( Det );
}
}
getRHT.ino
// RHT Temperature and Humidity Sensor
// setup RHT Temperature and Humidity Sensor
void setupRTH03() {
// RHT Temperature and Humidity Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT Temperature and Humidity Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
// Serial
// RHT Temperature and Humidity Sensor
// Temperature F
Serial.print( "Temp F: " );
Serial.println( latestTempF );
// Temperature C
Serial.print( "Temp C: " );
Serial.println( latestTempC );
// Humidity
Serial.print( "Humidity: " );
Serial.println( latestHumidity );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unique ID
isUID();
// Serial
Serial.begin( 9600 );
// RHT Temperature and Humidity Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
// PIR Motion
// Setup PIR
setupPIR();
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Don Luc Electronics
Serial.println( "Don Luc Electronics" );
// Version
Serial.println( sver );
// Is Unit ID
Serial.println( uid );
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
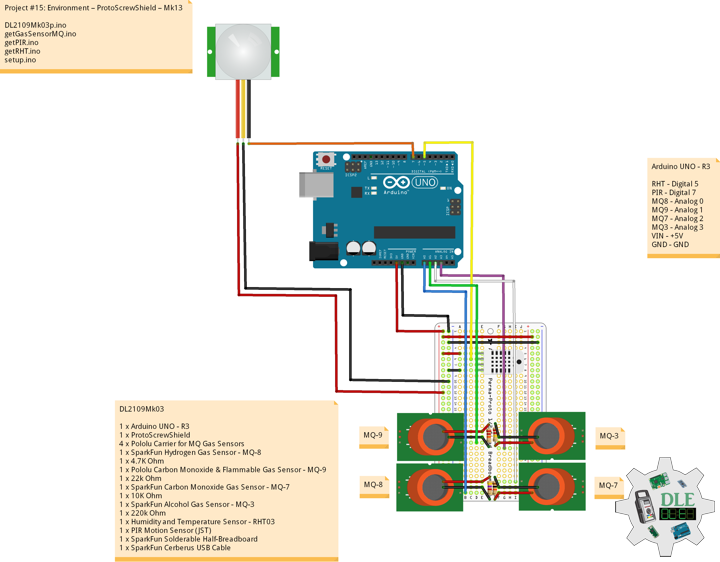
Project #15: Environment – ProtoScrewShield – Mk13
——
#DonLucElectronics #DonLuc #Environment #MQ #PIR #RHT03 #ArduinoUNO #Arduino #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
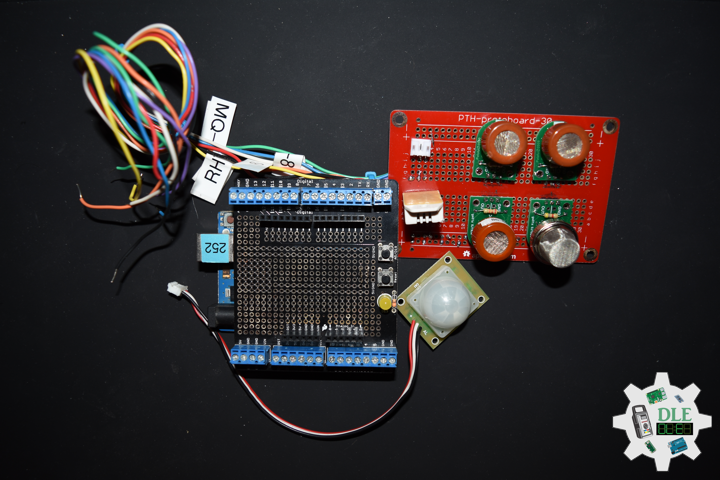
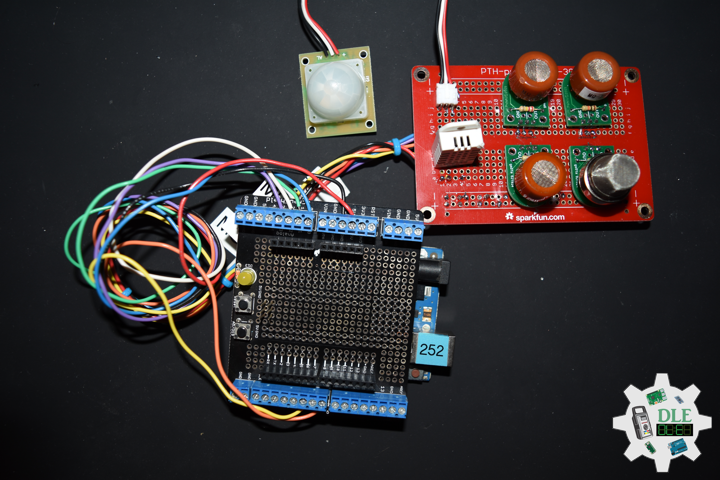
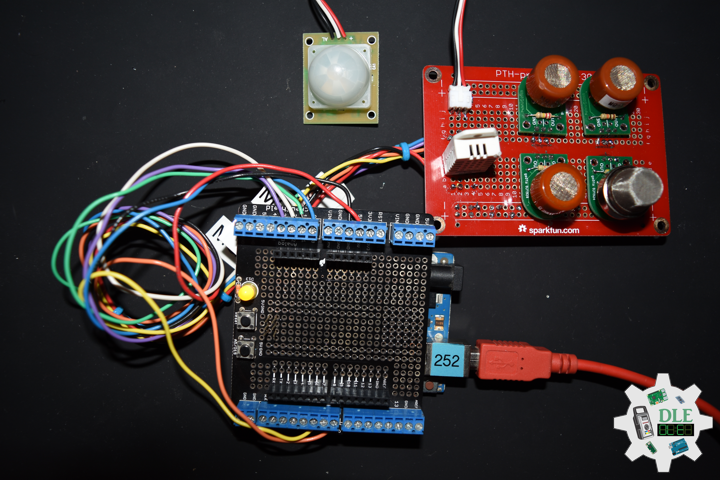
ProtoScrewShield
The ScrewShield extends all pins of the Arduino out to 3.5 mm pitch screw terminals. It also has a lot of the utility provided by Arduino Protoshield, including: a large prototyping space of both connected and unconnected 0.1 inch spaced through-holes, a couple 5V and GND busses, a reset button, general use push button, and a 5 mm yellow LED. This product includes all the parts shown and comes in kit form and must be soldered together by the end user.
DL2109Mk03
1 x Arduino UNO – R3
1 x ProtoScrewShield
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor- RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
Arduino UNO – R3
RHT – Digital 5
PIR – Digital 7
MQ8 – Analog 0
MQ9 – Analog 1
MQ7 – Analog 2
MQ3 – Analog 3
VIN – +5V
GND – GND
DL2109Mk03p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #15: Environment – ProtoScrewShield – Mk13
09-03
DL2109Mk03p.ino
1 x Arduino UNO - R3
1 x ProtoScrewShield
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor - MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor - MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor - RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include <EEPROM.h>
// RHT Temperature and Humidity Sensor
#include <SparkFun_RHT03.h>
// RHT Temperature and Humidity Sensor
// RHT03 data pin Digital 5
const int RHT03_DATA_PIN = 5;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A0;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet.
// With these two points, a line is formed which is
// "approximately equivalent" to the original curve.
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A1;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A2;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A3;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// PIR Motion
// Motion detector
const int iMotion = 7;
// Proximity
int proximity = LOW;
String Det = "";
// Software Version Information
String uid = "";
// Version
String sver = "15-13";
void loop()
{
// RHT Temperature and Humidity Sensor
isRHT03();
// Gas Sensors MQ
isGasSensor();
// isPIR Motion
isPIR();
// Delay
// Turn the LED on HIGH is the voltage level
digitalWrite(LED_BUILTIN, HIGH);
// Wait for a 0.5 second
delay( 500 );
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// Wait for a 0.5 second
delay( 500 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
// Serial
// Hydrogen Gas Sensor - MQ-8
Serial.print( "MQ-8: " );
Serial.println( iMQ8ppm );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
Serial.print( "MQ-9: " );
Serial.println( iMQ9ppm );
// Carbon Monoxide Gas Sensor - MQ-7
Serial.print( "MQ-7: " );
Serial.println( iMQ7ppm );
// Alcohol Gas Sensor - MQ-3
Serial.print( "MQ-3: " );
Serial.println( iMQ3ppm );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
// Serial
Serial.println( Det );
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
// Serial
Serial.println( Det );
}
}
getRHT.ino
// RHT Temperature and Humidity Sensor
// setup RHT Temperature and Humidity Sensor
void setupRTH03() {
// RHT Temperature and Humidity Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT Temperature and Humidity Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
// Serial
// RHT Temperature and Humidity Sensor
// Temperature F
Serial.print( "Temp F: " );
Serial.println( latestTempF );
// Temperature C
Serial.print( "Temp C: " );
Serial.println( latestTempC );
// Humidity
Serial.print( "Humidity: " );
Serial.println( latestHumidity );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unique ID
isUID();
// Serial
Serial.begin( 9600 );
// RHT Temperature and Humidity Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
// PIR Motion
// Setup PIR
setupPIR();
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Don Luc Electronics
Serial.println( "Don Luc Electronics" );
// Version
Serial.println( sver );
// Is Unit ID
Serial.println( uid );
delay( 5000 );
}
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
E-Mentor
——
#DonLucElectronics #DonLuc #EMentor #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——

——

——
——-
E-Mentoring
E-mentoring stemmed from mentoring programs with the invention of the Internet. Mentorship is a relationship in which a certain area of expertise. Mentoring is a process for the informal transmission of knowledge, social capital, and the psychosocial support perceived by the recipient as relevant to work, career, to have greater relevant knowledge, wisdom, or experience.
This is an up-and-coming, incredibly important position. Technology has been rapidly improving, and becoming more a part of day to day you must know how to get things done on the newest technology. A technology mentor will help with technical breakdowns, advise on systems that may work better than what you’re currently using, and coach you through new technology and how to best use it and implement it into your daily life.
Individuals around the world were in survival mode, experiencing various amounts of success and frustration in adopting legally enforced virtual work as they tried to maintain business continuity in a time of personal and professional uncertainty. Adaption was critical to the success of each organization and individual. And through it all we learned that work is something that we do, not somewhere that we go.
E-Mentor Over Zoom
Here’s how E-Mentor and E-Mentee can successfully spin up virtual classrooms, participate in online classes, and use Zoom for distance Technology E-Mentor microcontrollers and robotics.
Technology E-Mentor Microcontrollers and Robotics
In technology E-Mentor microcontrollers and robotics education program whose purpose is to assist users in learning how to use parts or any other application, operating system interface, or programming tool. There are three kinds of tutorials:
- Webinars where users participate in real-time tutorial workshops remotely using web conferencing software (Zoom).
- 1 E-Mentor <=> 1 E-Mentee.
- 1 E-Mentor <=> Group E-Mentee.
- A demonstration of a process, using examples to show how a workflow or process is completed.
- Some method of review that reinforces or tests understanding of the content in the related module or section.
- Written documents, audio file and microcontrollers programming downloadable.
- Kit: Development Board, Solder Soldering Irons, Beginner Parts, Small Parts, Discrete Semiconductor, Sensor, Guidebook, Etc…
At Luc Paquin I believe that an understanding of electronics is a core literacy that opens up a world of opportunities in the fields of robotics, Internet of Things (IoT), engineering, fashion, medical industries, environmental sciences, performing arts and more. This guide is designed to explore the connection between software and hardware, introducing Arduino code and parts as they are used in the context of building engaging projects. The circuits in this guide progress in difficulty as new concepts and components are introduced. Completing each circuit means much more than just experimenting you will walk away with a fun project you can use and a sense of accomplishment that is just the beginning of your electronics journey. At the end of each circuit, you’ll find coding challenges that extend your learning and fuel ongoing innovation.
Schedule of Services E-Mentor
- Beginner: These beginner-friendly microcontrollers are easy to use and program with just a computers or laptop, a USB cable, and some open-source software.
- Intermediate: Internet of Things (IoT).
- Advanced: Robotics, engineering, fashion, medical, environmental, performing arts, etc…
- Projects: TBD
- Consulting: TBD – https://www.jlpconsultants.com/
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
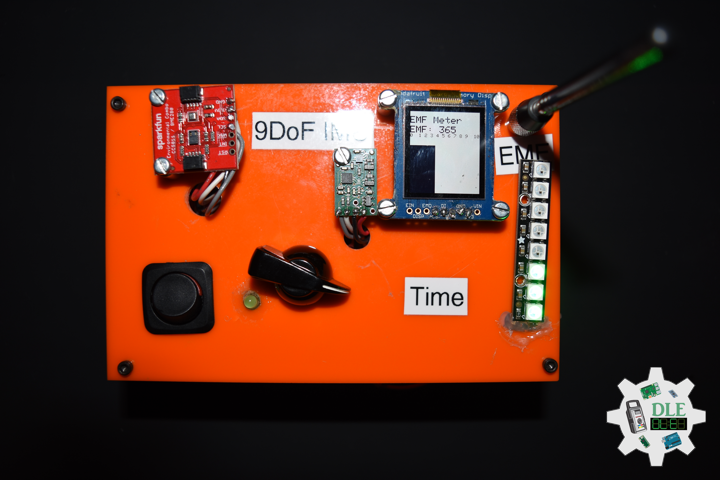
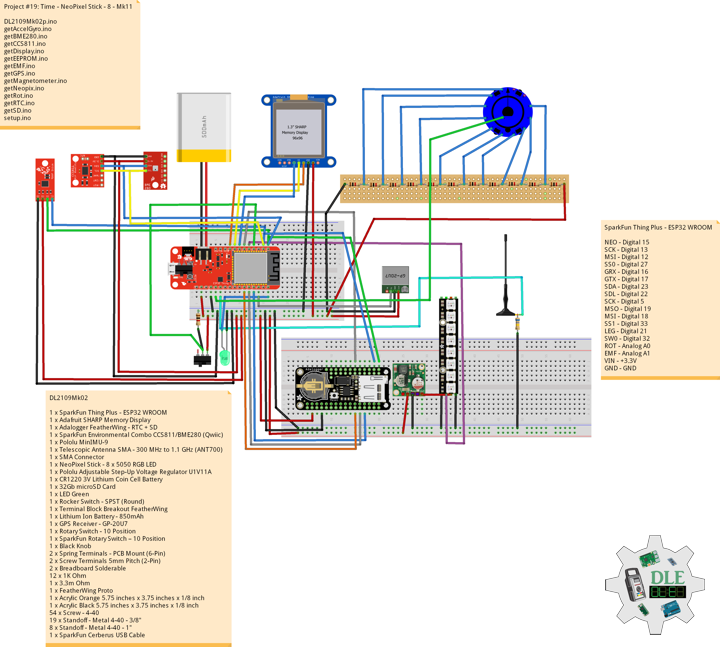
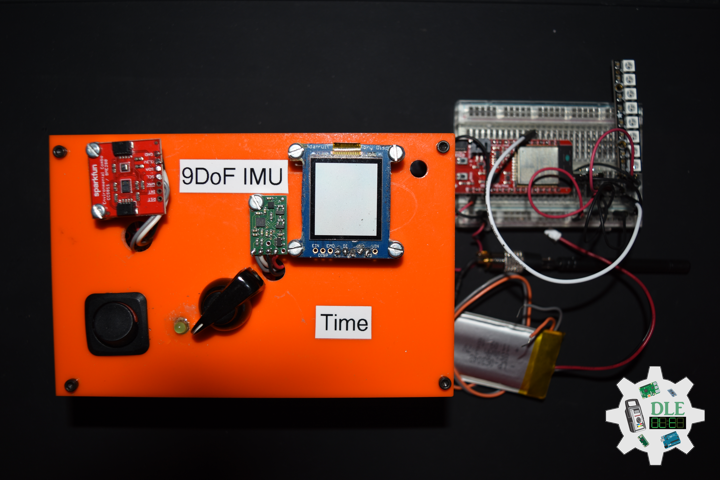
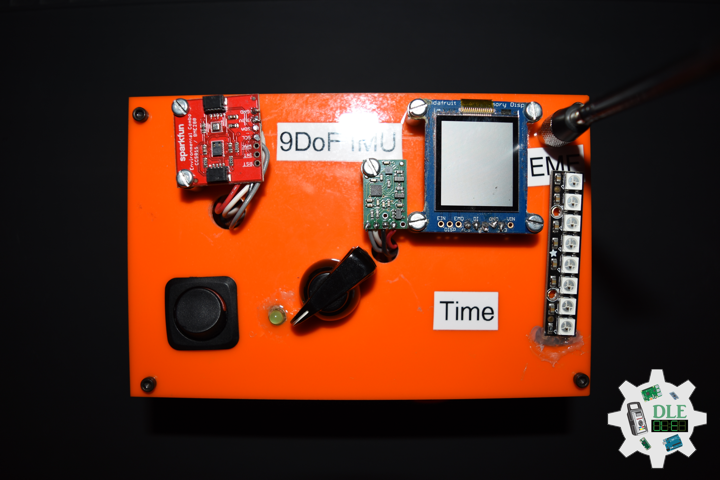
Project #19: Time – NeoPixel Stick – 8 – Mk11
——
#DonLucElectronics #DonLuc #Time #EMF #IMU #NeoPixel #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
Pololu Adjustable Step-Up Voltage Regulator U1V11A
This compact U1V11A switching step-up voltage regulator efficiently boosts input voltages as low as 0.5 V to an adjustable output voltage between 2 V and 5.25 V. Unlike most boost regulators, the U1V11A offers a true shutdown option that turns off power to the load, and it automatically switches to a linear down-regulation mode when the input voltage exceeds the output. The pins have a 0.1 inch spacing, making this board compatible with standard solderless breadboards.
NeoPixel Stick – 8 x 5050 RGB LED
Make your own little LED strip arrangement with this stick of NeoPixel LEDs. We crammed 8 of the tiny 5050 (5mm x 5mm) smart RGB LEDs onto a PCB with mounting holes and a chainable design. Use only one microcontroller pin to control as many as you can chain together! Each LED is addressable as the driver chip is inside the LED. Each one has ~18mA constant current drive so the color will be very consistent even if the voltage varies, and no external choke resistors are required making the design slim. Power the whole thing with 5VDC.
DL2109Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Pololu MinIMU-9
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x NeoPixel Stick – 8 x 5050 RGB LED
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Screw Terminals 5mm Pitch (2-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x 3.3m Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
54 x Screw – 4-40
19 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
NEO – Digital 15
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
EMF – Analog A1
VIN – +3.3V
GND – GND
——
DL2109Mk02p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - NeoPixel Stick - 8 - Mk11
09-02
DL2109Mk02p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Pololu MinIMU-9
1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x NeoPixel Stick - 8 x 5050 RGB LED
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Screw Terminals 5mm Pitch (2-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x 3.3m Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
54 x Screw - 4-40
19 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// 9DoF IMU
// STMicroelectronics LSM6DS33
#include <LSM6.h>
// STMicroelectronics LIS3MDL
#include <LIS3MDL.h>
// NeoPixels
#include <Adafruit_NeoPixel.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// 9DoF IMU
// STMicroelectronics LSM6DS33
LSM6 imu;
// // Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// NeoPixels
// On digital pin 15
#define PIN 15
// NeoPixels NUMPIXELS = 8
#define NUMPIXELS 8
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int zz = 0;
// EMF Meter (Single Axis)
int iEMF = A1;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int val = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
// Display EMF
int iEMFDis = 0;
int iEMFRect = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-11";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// EMF Meter (Single Axis)
isEMF();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,5);
display.println( "Temperature" );
display.setCursor(0,25);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,45);
display.println( "Humidity" );
display.setCursor(0,65);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,85);
display.println( "Altitude M" );
display.setCursor(0,105);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,125);
display.println( "Barometric" );
display.setCursor(0,145);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,5);
display.println( "eCO2" );
display.setCursor(0,25);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,55);
display.println( "tVOC" );
display.setCursor(0,75);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Accelerometer and Gyroscopes
void isDisplayAccGyr() {
// Text Display Accelerometer and Gyroscopes
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Accelerometer
display.setCursor(0,5);
display.println( "Accelero" );
display.setCursor(0,25);
display.print( "X: " );
display.println( imuAX );
display.setCursor(0,45);
display.print( "Y: " );
display.println( imuAY );
display.setCursor(0,65);
display.print( "Z: " );
display.println( imuAZ );
display.setCursor(0,85);
display.println( "Gyro" );
display.setCursor(0,105);
display.print( "X: " );
display.println( imuGX );
display.setCursor(0,125);
display.print( "Y: " );
display.println( imuGY );
display.setCursor(0,145);
display.print( "Z: " );
display.println( imuGZ );
// Refresh
display.refresh();
delay( 100 );
}
// Display Magnetometer
void isDisplayMag() {
// Text Display Magnetometer
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Magnetometer
display.setCursor(0,5);
display.println( "Magnetometer" );
display.setCursor(0,25);
display.print( "X: " );
display.println( magX );
display.setCursor(0,45);
display.print( "Y: " );
display.println( magY );
display.setCursor(0,65);
display.print( "Z: " );
display.println( magZ );
// Refresh
display.refresh();
delay( 100 );
}
// EMF Meter (Single Axis)
void isDisplayEMF() {
// Text Display EMF Meter
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// EMF Meter
display.setCursor(0,10);
display.println( "EMF Meter" );
display.setCursor(0,30);
display.print( "EMF: " );
display.println( iEMFDis );
display.setTextSize(1);
display.println( "0 1 2 3 4 5 6 7 8 9 10" );
display.setCursor(0,70);
display.drawRect(0, 70, iEMFRect , display.height(), BLACK);
display.fillRect(0, 70, iEMFRect , display.height(), BLACK);
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getEMF.ino
// EMF Meter (Single Axis)
// EMF Meter
void isEMF() {
isNUMPIXELSoff();
// Probe EMF Meter
for (int i = 0; i < NUMREADINGS; i++){
// Readings
readings[ i ] = analogRead( iEMF );
// Average
averageEMF += readings[i];
}
// Calculate the average
val = averageEMF / NUMREADINGS;
// If the reading isn't zero, proceed
if( val >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
val = constrain( val, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
val = map( val, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = val;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If the average is over 50 ...
if (averageEMF > 50){
zz = 0;
isNUMPIXELS();
}
// If the average is over 250 ...
if (averageEMF > 250){
zz = 1;
isNUMPIXELS();
}
// If the average is over 350 ...
if (averageEMF > 350){
zz = 2;
isNUMPIXELS();
}
// If the average is over 500 ...
if (averageEMF > 500){
zz = 3;
isNUMPIXELS();
}
// If the average is over 650 ...
if (averageEMF > 650){
zz = 4;
isNUMPIXELS();
}
// If the average is over 750 ...
if (averageEMF > 750){
zz = 5;
isNUMPIXELS();
}
// If the average is over 850 ...
if (averageEMF > 850){
zz = 6;
isNUMPIXELS();
}
// If the average is over 950 ...
if (averageEMF > 950){
zz = 7;
isNUMPIXELS();
}
iEMFDis = averageEMF;
iEMFRect = map( averageEMF, 1, 1023, 1, 144 );
// Average
averageEMF = 0;
}
else
{
// Average
averageEMF = 0;
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 150 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( zz ) {
case 0:
// NeoPixels
// Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels
// Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 1;
isNeopix();
break;
case 2:
// NeoPixels
// Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 2;
isNeopix();
break;
case 3:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 3;
isNeopix();
break;
case 4:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 4;
isNeopix();
break;
case 5:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 5;
isNeopix();
break;
case 6:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 6;
isNeopix();
break;
case 7:
// NeoPixels
// Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 7;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
for(int y=0; y < NUMPIXELS; y++)
{
red = 0; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = y; // Neopix
isNeopix();
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Accelerometer and Gyroscopes
isDisplayAccGyr();
break;
case 8:
// Display Magnetometer
isDisplayMag();
break;
case 9:
// EMF Meter (Single Axis)
isDisplayEMF();
break;
case 10:
// Display UID
isDisplayUID();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude
//|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|Accelerometer X|Accelerometer Y|Accelerometer Z|
//Gyroscopes X|Gyroscopes Y|Gyroscopes Z|Magnetometer X|Magnetometer Y|Magnetometer Z|EMF|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" +
TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|"
+ CCS811TVOC + "|" + imuAX + "|" + imuAY + "|" + imuAZ + "|" + imuGX + "|" + imuGY + "|" + imuGZ + "|" + magX + "|" + magY + "|" + magZ + "|" + iEMFDis + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// NeoPixels
// isNUMPIXELS Off
isNUMPIXELSoff();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – EMF Meters – Mk10
——
#DonLucElectronics #DonLuc #Time #EMF #NeoPixel #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
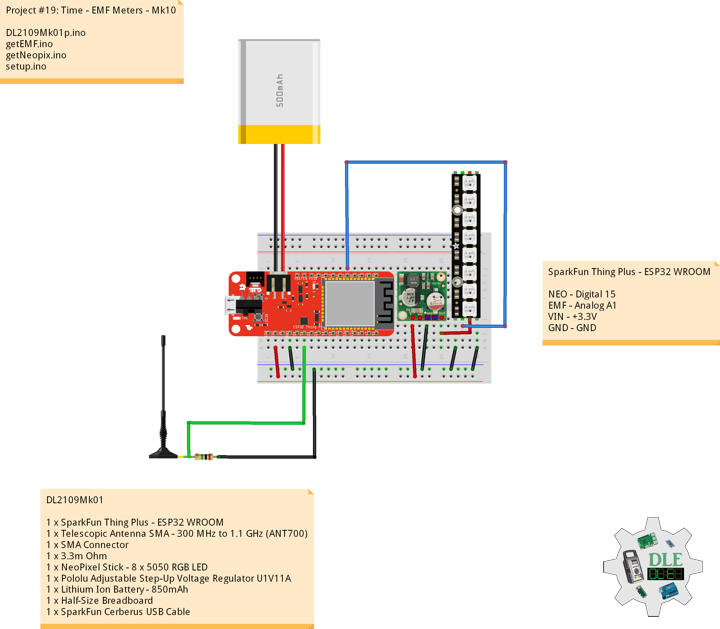
——
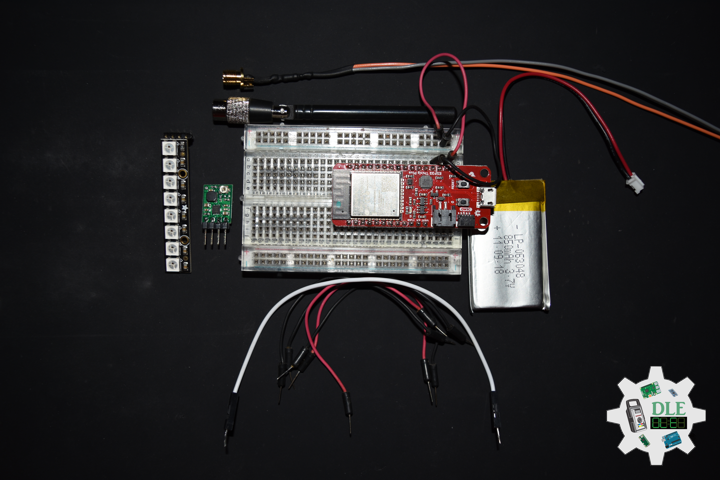
——
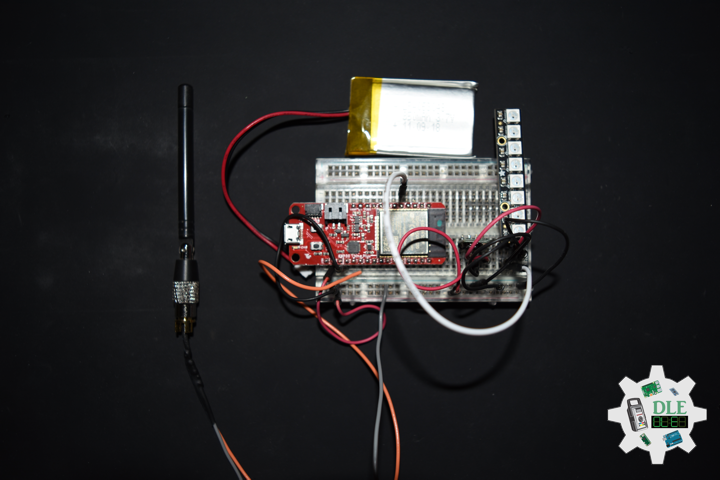
——
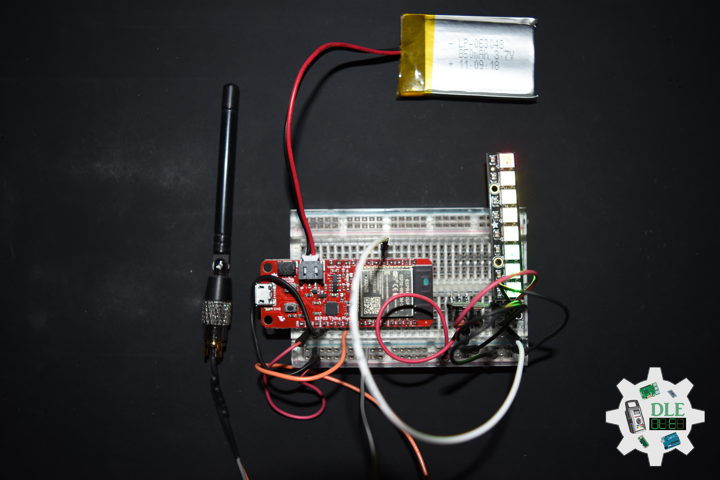
——
EMF Meters
EMF measurements are measurements of ambient electromagnetic fields that are performed using particular sensors or probes, such as EMF meters. These probes can be generally considered as antennas although with different characteristics. In fact, probes should not perturb the electromagnetic field and must prevent coupling and reflection as much as possible in order to obtain precise results. EMF probes may respond to fields only on one axis frequency selective measurements in which the measurement system consists of a field antenna and a frequency selective receiver or spectrum analyzer allowing to monitor the frequency range of interest. Amplified, active, probes can improve measurement precision and sensitivity but their active components may limit their speed of response.
SMA Connector
PCB edge mount – SMA RF connector. Perfect for prototyping with the GPS and Cellular devices that require an antenna connection. These connectors have a female signal pin and will correctly mate with the original SMA type antennas.
Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
This ANT700 is a telescopic antenna designed for operation from 300 MHz to 1.1 GHz with a total length that is configurable from 9.5 cm to 24.5 cm. Each ANT700 is constructed of stainless steel and features an SMA male connector, rotating shaft, and adjustable elbow.
DL2109Mk01
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Telescopic Antenna SMA – 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x 3.3m Ohm
1 x NeoPixel Stick – 8 x 5050 RGB LED
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
1 x Lithium Ion Battery – 850mAh
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
NEO – Digital 15
EMF – Analog A1
VIN – +3.3V
GND – GND
DL2109Mk01p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - EMF Meters - Mk10
09-01
DL2109Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Telescopic Antenna SMA - 300 MHz to 1.1 GHz (ANT700)
1 x SMA Connector
1 x 3.3m Ohm
1 x NeoPixel Stick - 8 x 5050 RGB LED
1 x Pololu Adjustable Step-Up Voltage Regulator U1V11A
1 x Lithium Ion Battery - 850mAh
1 x Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include Library Code
#include <Adafruit_NeoPixel.h>
// NeoPixels
// On digital pin 15
#define PIN 15
// NeoPixels NUMPIXELS = 8
#define NUMPIXELS 8
// Pixels
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Red
int red = 0;
// Green
int green = 0;
// Blue
int blue = 0;
// Neopix
int iNeo = 0;
// Value
int z = 0;
// EMF Meter (Single Axis)
int iEMF = A1;
// Raise this number to increase data smoothing
#define NUMREADINGS 15
// Raise this number to decrease sensitivity (up to 1023 max)
int senseLimit = 15;
// EMF Value
int val = 0;
// Readings from the analog input
int readings[ NUMREADINGS ];
// Index of the current reading
int indexEMF = 0;
// Running total
int totalEMF = 0;
// Final average of the probe reading
int averageEMF = 0;
// Software Version Information
// Version
String sver = "19-10";
void loop()
{
// EMF Meter (Single Axis)
isEMF();
delay(250);
}
getEMF.ino
// EMF Meter (Single Axis)
// EMF Meter
void isEMF() {
isNUMPIXELSoff();
// Probe EMF Meter
for (int i = 0; i < NUMREADINGS; i++){
// Readings
readings[ i ] = analogRead( iEMF );
// Average
averageEMF += readings[i];
}
// Calculate the average
val = averageEMF / NUMREADINGS;
// If the reading isn't zero, proceed
if( val >= 1 ){
// Turn any reading higher than the senseLimit value into the senseLimit value
val = constrain( val, 1, senseLimit );
// Remap the constrained value within a 1 to 1023 range
val = map( val, 1, senseLimit, 1, 1023 );
// Subtract the last reading
totalEMF -= readings[ indexEMF ];
// Read from the sensor
readings[ indexEMF ] = val;
// Add the reading to the total
totalEMF += readings[ indexEMF ];
// Advance to the next index
indexEMF = ( indexEMF + 1 );
// If the average is over 50 ...
if (averageEMF > 50){
z = 0;
isNUMPIXELS();
}
// If the average is over 250 ...
if (averageEMF > 250){
z = 1;
isNUMPIXELS();
}
// If the average is over 350 ...
if (averageEMF > 350){
z = 2;
isNUMPIXELS();
}
// If the average is over 500 ...
if (averageEMF > 500){
z = 3;
isNUMPIXELS();
}
// If the average is over 650 ...
if (averageEMF > 650){
z = 4;
isNUMPIXELS();
}
// If the average is over 750 ...
if (averageEMF > 750){
z = 5;
isNUMPIXELS();
}
// If the average is over 850 ...
if (averageEMF > 850){
z = 6;
isNUMPIXELS();
}
// If the average is over 950 ...
if (averageEMF > 950){
z = 7;
isNUMPIXELS();
}
// Average
averageEMF = 0;
}
else
{
// Average
averageEMF = 0;
}
}
getNeopix.ino
// NeoPixels
// Neopix
void isNeopix()
{
// Pixels
pixels.setBrightness( 150 );
// Pixels color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor( iNeo, pixels.Color(red,green,blue) );
// This sends the updated pixel color to the hardware
pixels.show();
// Delay for a period of time (in milliseconds)
delay(50);
}
// isNUMPIXELS
void isNUMPIXELS()
{
// Neopix Value
switch ( z ) {
case 0:
// NeoPixels
// Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 0;
isNeopix();
break;
case 1:
// NeoPixels
// Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 1;
isNeopix();
break;
case 2:
// NeoPixels
// Green
// Red
red = 0;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 2;
isNeopix();
break;
case 3:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 3;
isNeopix();
break;
case 4:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 4;
isNeopix();
break;
case 5:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 5;
isNeopix();
break;
case 6:
// NeoPixels
// Yellow
// Red
red = 255;
// Green
green = 255;
// Blue
blue = 0;
// Neopix
iNeo = 6;
isNeopix();
break;
case 7:
// NeoPixels
// Red
// Red
red = 255;
// Green
green = 0;
// Blue
blue = 0;
// Neopix
iNeo = 7;
isNeopix();
break;
}
}
// isNUMPIXELSoff
void isNUMPIXELSoff()
{
// Black Off
// NeoPixels
for(int y=0; y < NUMPIXELS; y++)
{
red = 0; // Red
green = 0; // Green
blue = 0; // Blue
iNeo = y; // Neopix
isNeopix();
}
}
setup.ino
// Setup
void setup()
{
// NeoPixels
// This initializes the NeoPixel library
pixels.begin();
// isNUMPIXELS Off
isNUMPIXELSoff();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – 9DoF IMU – Mk09
——
#DonLucElectronics #DonLuc #Time #IMU #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
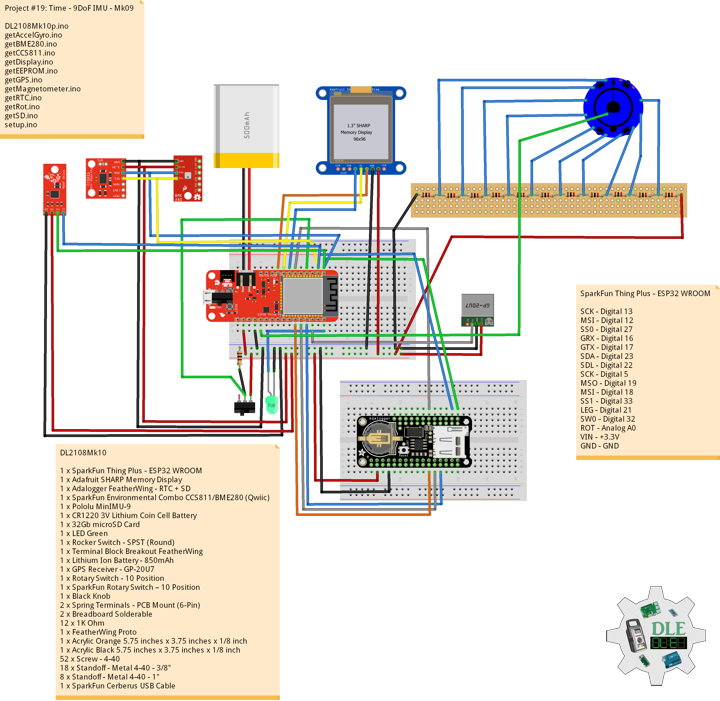
——

——
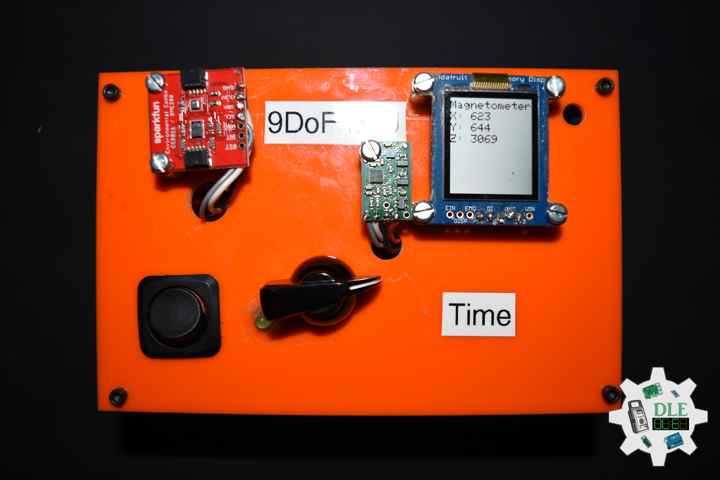
——
IMU
Accelerometers, gyroscopes and magnetometer are great, but alone they don’t give you quite enough information to be able to comfortably calculate things like orientation, position, and velocity. To measure those and other variables many people combine the two sensors, to create an inertial measurement unit (IMU) which provides two to nine degrees of freedom (DOF). IMUs are widely used in devices that require knowledge of their exact position, for example robotic arms, guided missiles, and tools used in the study of body motion.
IMUs can really be broken down into two classes: simple IMU combo boards, which just mount an accelerometer, gyroscopes and magnetometer onto a single PCB, and more complex units that interface a microcontroller with the sensors to produce a serial output. If you’ve glanced over the previous sections, you should know what kind of specifications to be looking for in IMUs: the number of axes (both for the accelerometer, gyroscopes and magnetometer), the measuring range of the sensors, and the interface.
Pololu MinIMU-9 v5 Gyro, Accelerometer, and Compass
The Pololu MinIMU-9 v5 is an inertial measurement unit (9DoF IMU) that packs an LSM6DS33 3-axis gyro and 3-axis accelerometer and an LIS3MDL 3-axis magnetometer onto a tiny board. An I²C interface accesses nine independent rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s absolute orientation. The MinIMU-9 v5 board includes a voltage regulator and a level-shifting circuit that allow operation from 2.5 to 5.5 V, and the pin spacing makes it easy to use with standard solderless breadboards and perfboards.
STMicroelectronics LSM6DS33
The LSM6DS33 is a system-in-package featuring a 3D digital accelerometer and a 3D digital gyroscope performing at 1.25 mA in high-performance mode and enabling always-on low-power features for an optimal motion experience for the consumer. ST’s family of MEMS sensor modules leverages the robust and mature manufacturing processes already used for the production of micromachined accelerometers and gyroscopes.
STMicroelectronics LIS3MDL
The LIS3MDL is an ultra-low-power high-performance three-axis magnetic sensor. The LIS3MDL has user-selectable full scales of gauss. The self-test capability allows the user to check the functioning of the sensor in the final application. The device may be configured to generate interrupt signals for magnetic field detection.
DL2108Mk10
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Pololu MinIMU-9
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
54 x Screw – 4-40
19 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
——
DL2108Mk10p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - 9DoF IMU - Mk09
08-10
DL2108Mk10p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Pololu MinIMU-9
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
54 x Screw - 4-40
19 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// 9DoF IMU
// STMicroelectronics LSM6DS33
#include <LSM6.h>
// STMicroelectronics LIS3MDL
#include <LIS3MDL.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// 9DoF IMU
// STMicroelectronics LSM6DS33
LSM6 imu;
// // Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-09";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
// isBME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,5);
display.println( "Temperature" );
display.setCursor(0,25);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,45);
display.println( "Humidity" );
display.setCursor(0,65);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,85);
display.println( "Altitude M" );
display.setCursor(0,105);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,125);
display.println( "Barometric" );
display.setCursor(0,145);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,5);
display.println( "eCO2" );
display.setCursor(0,25);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,55);
display.println( "tVOC" );
display.setCursor(0,75);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Accelerometer and Gyroscopes
void isDisplayAccGyr() {
// Text Display Accelerometer and Gyroscopes
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Accelerometer
display.setCursor(0,5);
display.println( "Accelero" );
display.setCursor(0,25);
display.print( "X: " );
display.println( imuAX );
display.setCursor(0,45);
display.print( "Y: " );
display.println( imuAY );
display.setCursor(0,65);
display.print( "Z: " );
display.println( imuAZ );
display.setCursor(0,85);
display.println( "Gyro" );
display.setCursor(0,105);
display.print( "X: " );
display.println( imuGX );
display.setCursor(0,125);
display.print( "Y: " );
display.println( imuGY );
display.setCursor(0,145);
display.print( "Z: " );
display.println( imuGZ );
// Refresh
display.refresh();
delay( 100 );
}
// Display Magnetometer
void isDisplayMag() {
// Text Display Magnetometer
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Magnetometer
display.setCursor(0,5);
display.println( "Magnetometer" );
display.setCursor(0,25);
display.print( "X: " );
display.println( magX );
display.setCursor(0,45);
display.print( "Y: " );
display.println( magY );
display.setCursor(0,65);
display.print( "Z: " );
display.println( magZ );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Accelerometer and Gyroscopes
isDisplayAccGyr();
break;
case 8:
// Display Magnetometer
isDisplayMag();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude
//|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|Accelerometer X|Accelerometer Y|Accelerometer Z|
//Gyroscopes X|Gyroscopes Y|Gyroscopes Z|Magnetometer X|Magnetometer Y|Magnetometer Z|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" +
TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|"
+ CCS811TVOC + "|" + imuAX + "|" + imuAY + "|" + imuAZ + "|" + imuGX + "|" + imuGY + "|" + imuGZ + "|" + magX + "|" + magY + "|" + magZ + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Temperature, Humidity, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – Qwiic Connect System – Mk08
—–
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog #VideoBlog
——
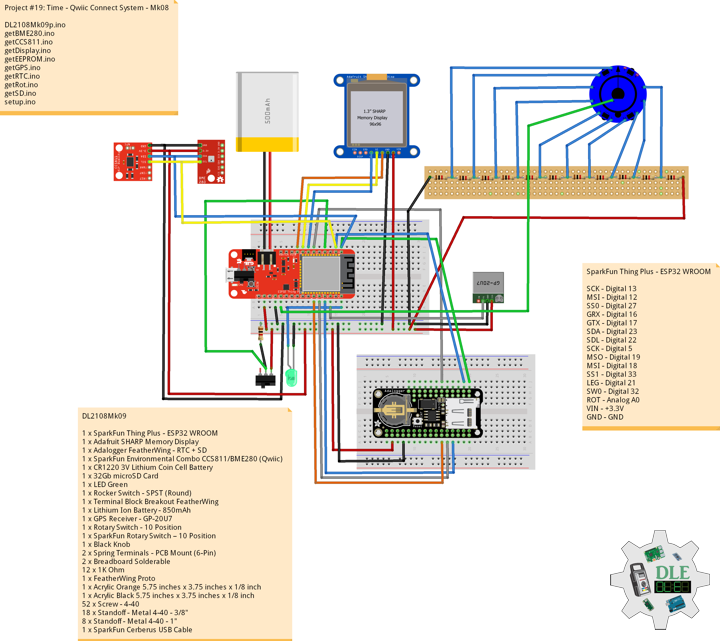
——

——

——
Qwiic Connect System
Prototyping with I2C has never been easier. SparkFun’s Qwiic Connect System uses 4-pin JST connectors to quickly interface development boards with sensors, LCDs, relays and more.
DL2108Mk09
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw – 4-40
18 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
DL2108Mk09p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - Qwiic Connect System - Mk08
08-08
DL2108Mk09p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw - 4-40
18 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-08";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display BME280
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – Terminal Block Breakout FeatherWing – Mk07
——
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
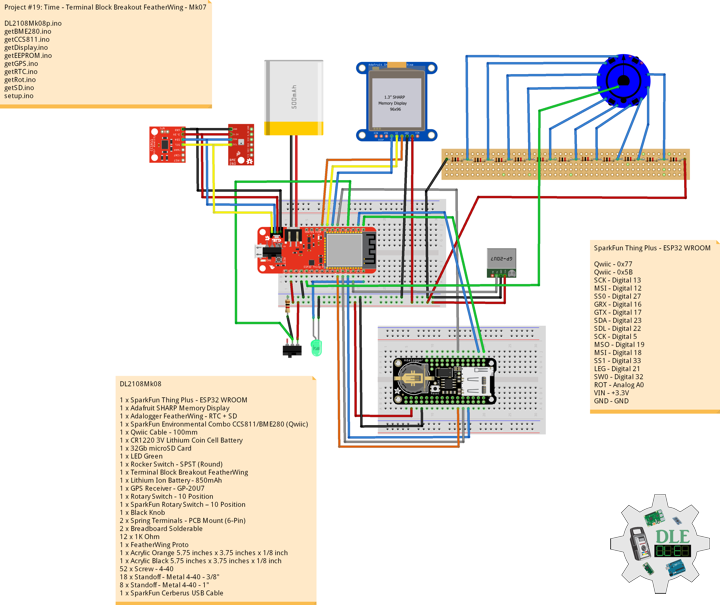
——
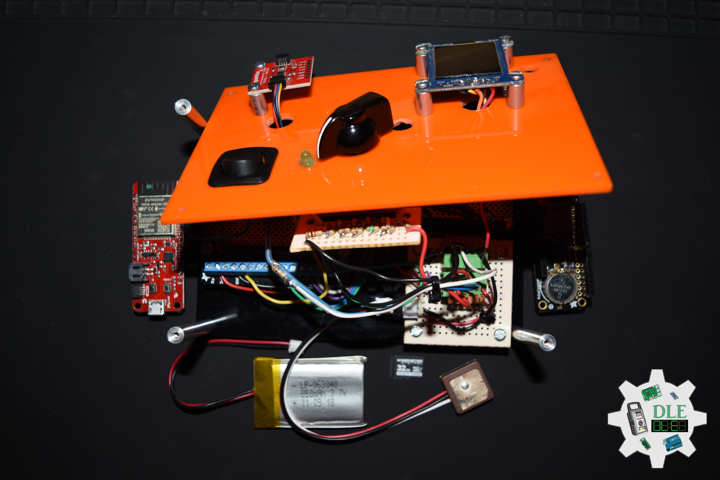
——

——

——
Terminal Block Breakout FeatherWing
The Terminal Block Breakout FeatherWing kit is like the of prototyping FeatherWings. To start, you get a nice prototyping area underneath your Feather, with extra pads for ground, 3.3V and SDA/SCL. There’s also four mounting holes so you can attach the breakout to your enclosure or project.
This product works with all our Feathers. The terminal blocks allow you to connect to any of the external Feather pins, great for wiring temporary or permanent installations. We also give you a few extra terminal block pins for ground and 3.3V connections since those are so useful.
FeatherWing Proto
This is the FeatherWing Proto – a prototyping add-on for all Feather boards. This has a duplicate breakout for each pin on a Feather, as well as a bunch of plain grid proto holes. For GND and 3.3V, we give you a strip of connected pads. There’s plenty of room for buttons, indicator LEDs, or anything for your portable project. The FeatherWing Proto makes an ideal partner for any of our Feather boards.
DL2108Mk08
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Qwiic Cable – 100mm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw – 4-40
18 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
Qwiic – 0x77
Qwiic – 0x5B
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
——
DL2108Mk08p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - Terminal Block Breakout FeatherWing - Mk07
08-07
DL2108Mk07p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x Acrylic Orange 5.75 inches x 3.75 inches x 1/8 inch
1 x Acrylic Black 5.75 inches x 3.75 inches x 1/8 inch
52 x Screw - 4-40
18 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-07";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display BME280
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #19: Time – SparkFun Environmental Combo CCS811/BME280 – Mk06
——
#DonLucElectronics #DonLuc #Time #RTC #Display #Adalogger #MicroSD #GPSReceiver #CCS811 #BME280 #Arduino #ESP32 #SparkFunESP32WROOM #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
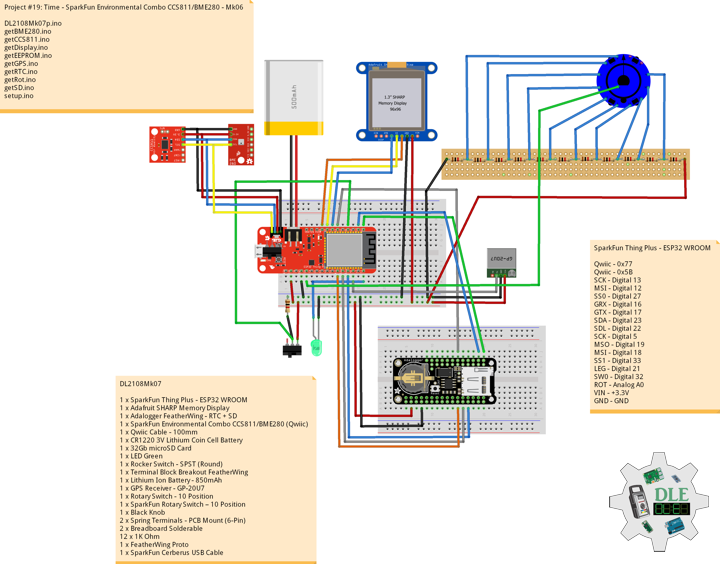
——
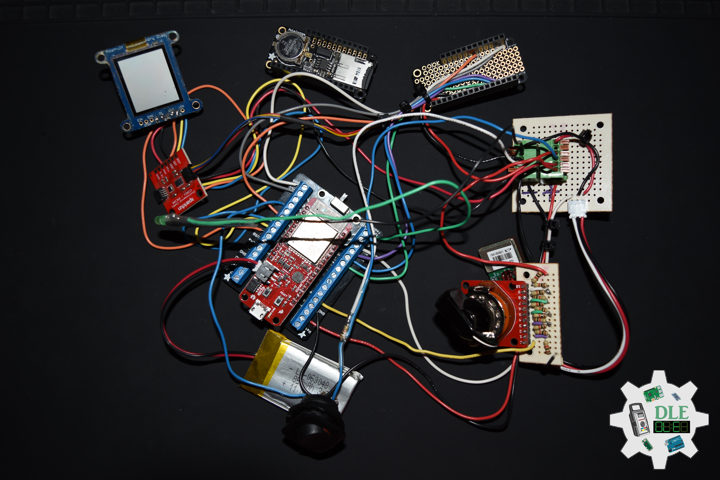
——
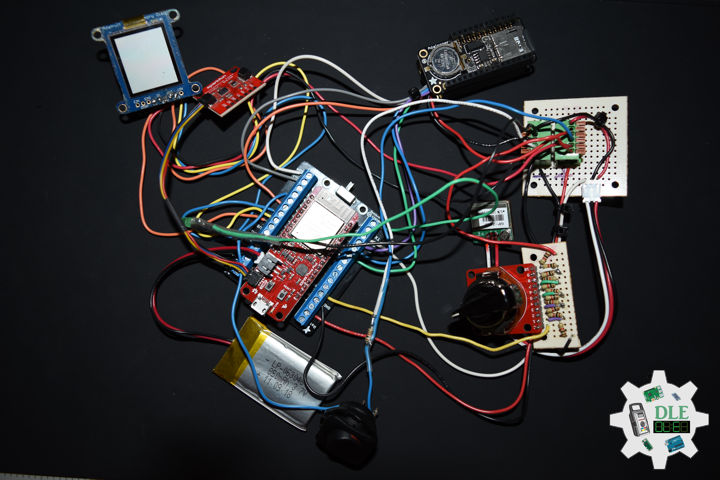
——
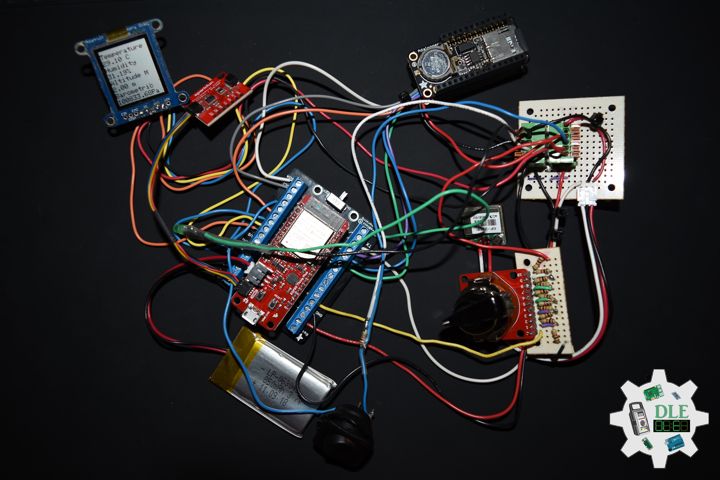
——
SparkFun Environmental Combo Breakout – CCS811/BME280 (Qwiic)
The SparkFun CCS811/BME280 Environmental Combo Breakout takes care of all your atmospheric-quality sensing needs with the popular CCS811 and BME280 ICs. This unique breakout provides a variety of environmental data, including barometric pressure, humidity, temperature, TVOCs and equivalent eCO2 levels. To make it even easier to use this breakout, all communication is enacted exclusively via I2C, utilizing our handy Qwiic system. However, we still have broken out 0.1″ spaced pins in case you prefer to use a breadboard.
Bosch Sensortec BME280
The BME280 is as combined digital humidity, pressure and temperature sensor based on proven sensing principles. Its small dimensions and its low power consumption allow the implementation in battery driven devices such as handsets, GPS modules or watches. The BME280 achieves high performance in all applications requiring humidity and pressure measurement. These emerging applications of home automation control, indoor navigation, health care as well as GPS refinement require a high accuracy and a low TCO at the same time. The humidity sensor provides an extremely fast response time for fast context awareness applications and high overall accuracy over a wide temperature range. The pressure sensor is an absolute barometric pressure sensor with extremely high accuracy and resolution.
Typical Application
-Context awareness, e.g. skin detection, room change detection
-Health monitoring / well-being
-Warning regarding dehydration or heat stroke
-Spirometry (measurement of lung volume and air flow)
-Home automation control
-Control heating, venting, air conditioning (HVAC)
-Internet of Things
-GPS enhancement (e.g. time-to-first-fix improvement, dead reckoning, slope detection)
-Indoor navigation (change of floor detection, elevator detection)
-Outdoor navigation, leisure and sports applications
-Weather forecast
-Vertical velocity indication (rise/sink speed)
Target devices
-Handsets such as mobile phones, tablet PCs, GPS devices
-Navigation systems
-Gaming, e.g flying toys
-Camera (DSC, video)
-Portable health care devices
-Home weather stations
-Flying toys
-Watches
ams AG CCS811
The CCS811 is an exceedingly popular sensor, providing readings for equivalent eCO2 in the PPM and total volatile organic compounds in the PPB. The CCS811 is an ultra-low power digital gas sensor solution which integrates a metal oxide (MOX) gas sensor to detect a wide range of Volatile Organic Compounds (VOCs) for indoor air quality monitoring with a microcontroller unit (MCU), which includes an Analog-to-Digital converter (ADC), and an I²C interface.
DL2108Mk07
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing – RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x Qwiic Cable – 100mm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch – SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 850mAh
1 x GPS Receiver – GP-20U7
1 x Rotary Switch – 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals – PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
Qwiic – 0x77
Qwiic – 0x5B
SCK – Digital 13
MSI – Digital 12
SS0 – Digital 27
GRX – Digital 16
GTX – Digital 17
SDA – Digital 23
SDL – Digital 22
SCK – Digital 5
MSO – Digital 19
MSI – Digital 18
SS1 – Digital 33
LEG – Digital 21
SW0 – Digital 32
ROT – Analog A0
VIN – +3.3V
GND – GND
——
DL2108Mk07p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #19: Time - SparkFun Environmental Combo CCS811/BME280 - Mk06
08-07
DL2108Mk07p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Adafruit SHARP Memory Display
1 x Adalogger FeatherWing - RTC + SD
1 x SparkFun Environmental Combo CCS811/BME280 (Qwiic)
1 x CR1220 3V Lithium Coin Cell Battery
1 x 32Gb microSD Card
1 x LED Green
1 x Rocker Switch - SPST (Round)
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 850mAh
1 x GPS Receiver - GP-20U7
1 x Rotary Switch - 10 Position
1 x SparkFun Rotary Switch – 10 Position
1 x Black Knob
2 x Spring Terminals - PCB Mount (6-Pin)
2 x Breadboard Solderable
12 x 1K Ohm
1 x FeatherWing Proto
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// Date and time RTC
#include "RTClib.h"
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
#include <SparkFunBME280.h>
// SHARP Memory Display
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
// Date
String dateRTC = "";
// Time
String timeRTC = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// Rotary Switch - 10 Position
// Number 1 => 10
int iRotNum = A0;
// iRotVal - Value
int iRotVal = 0;
// Number
int z = 0;
// MicroSD Card
const int chipSelect = 33;
String zzzzzz = "";
// LED Green
int iLEDGreen = 21;
// Rocker Switch - SPST (Round)
int iSS1 = 32;
// State
int iSS1State = 0;
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
// eCO2
float CCS811CO2 = 0;
// TVOC
float CCS811TVOC = 0;
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
BME280 myBME280;
// Temperature Celsius
float BMEtempC = 0;
// Humidity
float BMEhumid = 0;
// Altitude Meters
float BMEaltitudeM = 0;
// Barometric Pressure
float BMEpressure = 0;
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Version
String sver = "19-06";
void loop()
{
// Dates and Time
isRTC();
// isGPS
isGPS();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Rotary Switch
isRot();
// Slide Switch
// Read the state of the iSS1 value
iSS1State = digitalRead(iSS1);
// If it is the Slide Switch State is HIGH
if (iSS1State == HIGH) {
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// MicroSD Card
isSD();
} else {
// iLEDGreen LOW
digitalWrite(iLEDGreen, LOW );
}
delay( 1000 );
}
getBME280.ino
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
// isBME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
// Display Date
void isDisplayDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( "Date" );
display.setCursor(0,30);
display.println( dateRTC );
// Time
display.setCursor(0,55);
display.println( "Time" );
display.setCursor(0,75);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS Status
display.setCursor(0,5);
display.print( "GPS: " );
display.println( GPSSt );
// Target Latitude
display.setCursor(0,25);
display.println( "Latitude" );
display.setCursor(0,45);
display.println( TargetLat );
// Target Longitude
display.setCursor(0,65);
display.println( "Longitude" );
display.setCursor(0,90);
display.println( TargetLon );
// Refresh
display.refresh();
delay( 100 );
}
// GPS Date, Time, Speed, Altitude
void isDisplayGPSDate() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// GPS
display.setCursor(0,5);
display.println( "GPS" );
// Date
display.setCursor(0,30);
display.println( TargetDat );
// Time
display.setCursor(0,55);
display.println( TargetTim );
// Speed
display.setCursor(0,75);
display.print( "M/S: " );
display.println( TargetSMS );
display.setCursor(0,95);
display.print( "Km/h: " );
display.println( TargetSKH );
display.setCursor(0,115);
display.print( "Alt: " );
display.println( TargetALT );
// Refresh
display.refresh();
delay( 100 );
}
// Display BME280 - Humidity, Temperature, Altitude and Barometric Pressure
void isDisplayBME280() {
// Text Display BME280
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,10);
display.println( "Temperature" );
display.setCursor(0,30);
display.print( BMEtempC );
display.println( " C" );
// Humidity
display.setCursor(0,50);
display.println( "Humidity" );
display.setCursor(0,70);
display.print( BMEhumid );
display.println( "%" );
// Altitude Meters
display.setCursor(0,90);
display.println( "Altitude M" );
display.setCursor(0,110);
display.print( BMEaltitudeM );
display.println( " m" );
// Pressure
display.setCursor(0,130);
display.println( "Barometric" );
display.setCursor(0,150);
display.print( BMEpressure );
display.println( "Pa" );
// Refresh
display.refresh();
delay( 100 );
}
// Display CCS811 - eCO2 & tVOC
void isDisplayCCS811() {
// Text Display CCS811
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// eCO2 Concentration
display.setCursor(0,10);
display.println( "eCO2" );
display.setCursor(0,30);
display.print( CCS811CO2 );
display.println( " ppm" );
// tVOC Concentration
display.setCursor(0,60);
display.println( "tVOC" );
display.setCursor(0,80);
display.print( CCS811TVOC );
display.println( " ppb" );
// Refresh
display.refresh();
delay( 100 );
}
// Display Z
void isDisplayZ() {
// Text Display Z
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Z
display.setCursor(0,10);
display.print( "Z: " );
display.println( z );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
// rtc.adjust(DateTime(2021, 8, 18, 8, 48, 0));
}
}
// Date and Time RTC PCF8523
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
// Year
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
// Month
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
// Day
dateRTC = dateRTC + now.day(), DEC;
// Time
// Hour
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
// Minute
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
// Second
timeRTC = timeRTC + now.second(), DEC;
}
getRot.ino
// Rotary Switch
// isRot - iRotVal - Value
void isRot() {
// Rotary Switch
z = analogRead( iRotNum );
// Rotary Switch - 10 Position
// Number 1 => 10
if ( z >= 3600 ) {
// Z
iRotVal = 10;
} else if ( z >= 3200 ) {
// Z
iRotVal = 9;
} else if ( z >= 2700 ) {
// Z
iRotVal = 8;
} else if ( z >= 2400 ) {
// Z
iRotVal = 7;
} else if ( z >= 2000 ) {
// Z
iRotVal = 6;
} else if ( z >= 1600 ) {
// Z
iRotVal = 5;
} else if ( z >= 1200 ) {
// Z
iRotVal = 4;
} else if ( z >= 900 ) {
// Z
iRotVal = 3;
} else if ( z >= 500 ) {
// Z
iRotVal = 2;
} else {
// Z
iRotVal = 1;
}
// Range Value
switch ( iRotVal ) {
case 1:
// Display Date, Time
isDisplayDate();
break;
case 2:
// Display GPS
isDisplayGPS();
break;
case 3:
// GPS Date, Time, Speed, Altitude
//isDisplayGPSDate();
break;
case 4:
// GPS Display Date, Time, Speed
isDisplayGPSDate();
break;
case 5:
// Display BME280
isDisplayBME280();
break;
case 6:
// Display CCS811 - eCO2 & tVOC
isDisplayCCS811();
break;
case 7:
// Z
isDisplayZ();
break;
case 8:
// Z
isDisplayZ();
break;
case 9:
// Z
isDisplayZ();
break;
case 10:
// Z
isDisplayZ();
break;
}
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// EEPROM Unique ID|Version|Date|Time|GPS Status|Target Latitude|Target Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Speed Km/h|GPS Altitude|Temperature Celsius|Humidity|Altitude Meters|Barometric Pressure|eCO2 Concentration|tVOC Concentration|\r
zzzzzz = uid + "|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + GPSSt + "|" + TargetLat + "|" + TargetLon + "|" + TargetDat + "|" + TargetTim + "|" + TargetSMS + "|" + TargetSKH + "|" + TargetALT + "|" + BMEtempC + "|" + BMEhumid + "|" + BMEaltitudeM + "|" + BMEpressure + "|" + CCS811CO2 + "|" + CCS811TVOC + + "|\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// GPS Receiver
// Setup GPS
setupGPS();
// Set up I2C bus
Wire.begin();
// SparkFun BME280 - Humidity, Temperature, Altitude and Barometric Pressure
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
isDisplayUID();
// Setup RTC
setupRTC();
//MicroSD Card
setupSD();
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// Slide Switch
pinMode(iSS1, INPUT);
delay( 5000 );
}
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc